一种低轴向窜动电机
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及一种电机,尤其是涉及一种低轴向窜动电机。
背景技术
步进电机或无刷电机作为运动控制领域的基本动力单元,在各个领域都有很大的使用需求。随着工业的发展,精密化生产的要求越来越高,对于位置控制的高精度需求更是越来越高,尤其是当步进电机或无刷电机结合丝杆一起使用并提供轴向直线运动时,就需要考虑影响轴向直线运动的诸多因素了。
对于常规电机来说,电机本身在经受一定的轴向力后往往都会存在一定的轴向位移。然而就电机结构来看,通常转子是由两端的轴承固定在端盖的轴承室内,其中并不存在明显的机械间隙。那么其中的轴向位移则主要是机械结构弹性形变及轴承内部的游隙而导致的了。
目前微型电机多为锁紧块与深沟球轴承配合使用,通过锁紧块及垫片对轴承施加预紧力,从而减小轴承游隙。然而深沟球轴承本身并非游隙调整轴承,在预紧力过大时,轴承阻力会大于电机输出力矩,导致锁死。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种低轴向窜动电机。
本发明的目的可以通过以下技术方案来实现:
一种低轴向窜动电机,包括前端盖、后端盖、定子、转子和轴承,所述的轴承为可预紧轴承,所述的转子两端通过一对可预紧轴承固定在前后端盖的轴承室内,所述的可预紧轴承上装有提供预紧力的机构;
其中预紧力大小应根据不同电机系列调节,使电机定位力矩处于一个设定值。
优选地,所述的提供预紧力的机构包括锁紧块和弹性部件,所述的弹性部件安装在锁紧块和可预紧轴承之间,通过调节锁紧块,调节预紧力大小控制电机定位力矩。
优选地,所述的弹性部件为碟形弹簧。
优选地,所述的碟形弹簧采用成对设置,并采用面对面方式设置,且两者的内径处接触。
优选地,所述的碟形弹簧的外圆处分别接触可预紧轴承外圈和锁紧块。
优选地,所述的碟形弹簧的外圆处分别接触可预紧轴承外圈和端盖轴承室。
优选地,所述的可预紧轴承为角接触轴承。
优选地,所述的定位力矩值T1控制应在电机额定电流时静力矩值T0的2%~30%之间,即T0*0.02≤T1<T0*0.3。
与现有技术相比,本发明具有以下优点:
1)大幅降低轴向窜动。
使用深沟球轴承由于其结构问题,无法有效消除轴承游隙,通常在电机能正常工作的状态下下,在收到15kg轴向力时会存在0.1-0.2mm的窜动量。
而使用可预紧轴承后,相同条件下窜动量仅为0.003-0.006mm。可大幅降低轴向窜动,尤其在线性传动中,电机时时刻刻都会收到轴向推拉力,降低窜动值后对于有高定位精度、高精度的使用情况来说是非常有意义的。
2)对轴承施加预紧力,合适的预紧力可以增加轴承的刚度、承载力、提高寿命等优点。
同时根据应用环境及需求的不同可以通过调节预紧力大小,来优化整机表现。例如:对于有重载需求的可适当增加预紧力;对于高速轻载的可适当减小预紧力。
3)增加轴向负载能力,延长电机寿命。
深沟球轴承的承载能力主要为径向力和部分轴向力。然而对于线性传动中,电机本体时时刻刻都在承载交变的轴向载荷。而通常对于一台电机来说,最先损坏的往往便是轴承。
通过成对使用角接触轴承既解决了单一角接触轴承只可承载单向力的问题,同时又提高了整个系统对于轴向力的承载能力。
附图说明
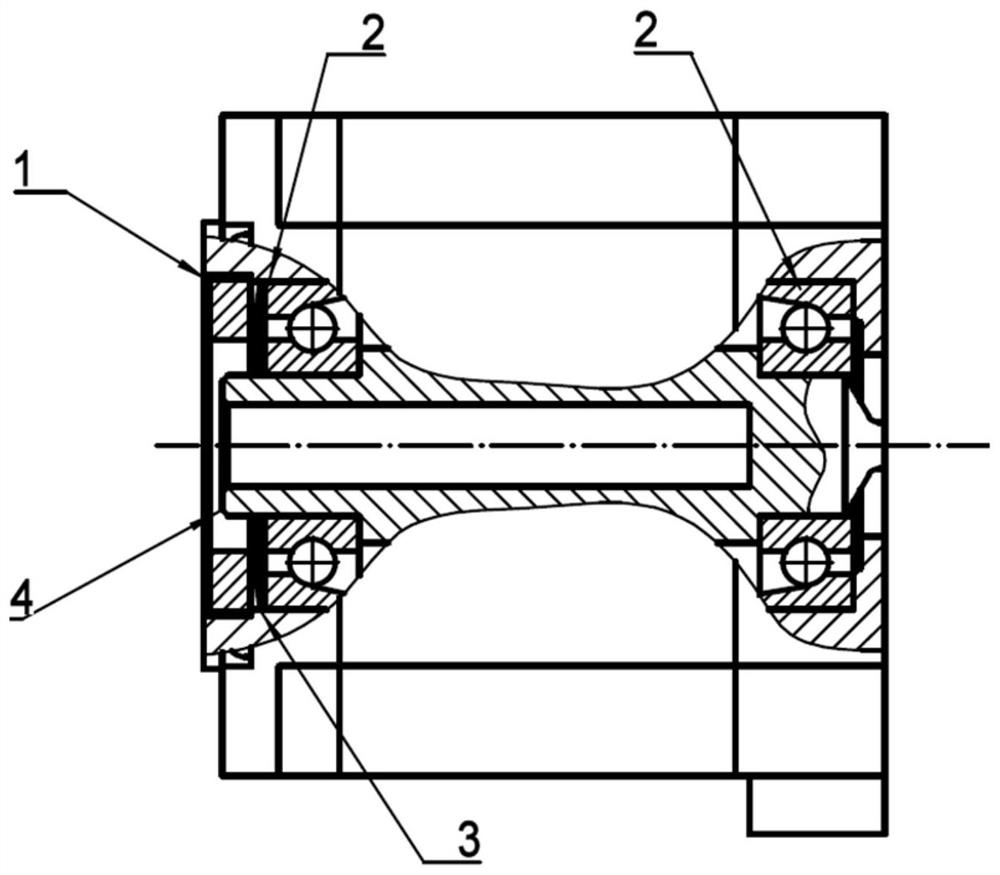
图1为本发明的剖视结构示意图;
图2为本发明的整机结构示意图;
图3为本发明具体实施例的爆炸结构主视示意图;
图4为本发明具体实施例的爆炸结构立体示意图;
图5为本发明的碟形垫圈结构示意图;
图6为本发明具体实施例的定位力矩值与15kg时轴向窜动曲线图。
其中1为锁紧块,2为可预紧轴承,3为弹性部件,4为转子。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
如图1和图2所示,一种低轴向窜动电机,包括前端盖、后端盖、定子、转子 4和轴承,所述的轴承为可预紧轴承2,所述的转子4两端通过一对可预紧轴承2 固定在前后端盖的轴承室内,所述的可预紧轴承2上装有提供预紧力的机构;
其中预紧力大小应根据不同电机系列调节,使电机定位力矩处于一个设定值。较为优选,所述的定位力矩值控制应在电机额定电流时静力矩的2%~30%之间。
所述的提供预紧力的机构包括锁紧块1和弹性部件3,所述的锁紧块1将弹性部件3安装在可预紧轴承2上。如图5所示,所述的弹性部件3为碟形弹簧。所述的碟形弹簧采用成对设置,并采用面对面方式设置,且两者的内径处接触。
所述的碟形弹簧的外圆处分别接触可预紧轴承2外圈和锁紧块1。另一种实施方式,所述的碟形弹簧的外圆处分别接触可预紧轴承2外圈和端盖轴承室。
所述的可预紧轴承2为角接触轴承,使用可预紧轴承后,大幅降低轴向窜动,尤其在线性传动中,电机时时刻刻都会收到轴向推拉力,降低窜动值后对于有高定位精度、高精度的使用情况来说是非常有意义的。
具体实施例
如图3-4所示,以NEMA23电机为例:根据NEMA23系列电机尺寸选用角接触轴承,其内外径分别为φ12mm、φ28mm。根据轴承现有内外圈尺寸寻找合适尺寸的碟形垫圈,使碟形垫圈作用于轴承外圈上。角接触轴承为面对面位于电机前后两端,蝶形弹簧为背对背位于电机前部角接触轴承和锁紧块之前。预紧力的设置为70-100mN·m。装配完成后调节锁紧块至合适预紧力,对于小于推荐值的预紧力会使轴承无法达到理想的预紧状态,对于大于推荐值的预紧力会使电机输出力矩降低,导致电机失步。最后通过测量电机定位力矩值和电机轴向窜动值确保轴向窜动值处于管控范围内,如图6所示。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。