一种多农业机器人的转弯协调控制方法及装置
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于机器人技术领域,尤其是涉及一种多农业机器人的转弯协调控制方法及装置。
背景技术
农业机器人出现后,快速成为全世界农业自动化发展的热点,目前,通过人工控制的方式,操控农业机器人在田地中作业,或使农业机器人以固定路径前进作业,然而,在多农业机器人协同作业时,往往需要多人分别操控,以避免农业机器人碰撞追尾等事故的发生,造成经济损失,这种方式虽通过农业机器人取代了人工,但多人操控农业机器人作业仍占用大量人力。
经检索,国家专利号为CN 106843221 B公开了一种多农业机器人的转弯协调控制方法,所述方法包括:为每个农业机器人分配一个优先权限,控制农业机器人运用U-turn转弯理论进行地头转弯,并预先设定农业机器人地头转弯过程中各阶段的转弯标志;根据每两个农业机器人的优先权限和转弯标志,协调每两个所述农业机器人进行地头转弯。
现有的多农业机器人的转弯协调控制方法存在以下不足之处:仅适用于小型田地,或工作距离密集的两个至多个农业机器人进行转弯协调,在农业机器人大型农场中作业时,若两个农业机器人距离较远,转弯时不会发生碰撞,仍然按照U-turn转弯理论进转弯时,转弯内侧的农业机器人会白白浪费等待时间,不利于工作效率的提高;并且,农业机器人在转弯过程中,作业机持续工作,造成能源的浪费,提高了作业成本。
为此,我们提出一种多农业机器人的转弯协调控制方法及装置来解决上述问题。
发明内容
本发明的目的是针对上述多农业机器人难以协调控制的问题,提供一种可协调控制多农业机器人的多农业机器人的转弯协调控制方法及装置。
为达到上述目的,本发明采用了下列技术方案:一种多农业机器人的转弯协调控制方法,包括以下步骤:
S1,GPS定位模块收集多个农业机器人的数据信息,所述数据信息包括各个农业机器人的编号、所处位置和行进方向;
S2,通过信号传输模块将GPS定位模块收集的多个所述农业机器人的数据信息传输至中央处理模块,所述中央处理模块根据数据信息将多个运行状态的农业机器人分为多个工作阶段;
S3,中央处理模块根据多个所述农业机器人对应的数据信息、工作阶段和三让原则,控制待转弯农业机器人进行地头转弯或停止等待,对多个所述农业机器人进行协调转弯。
在上述的多农业机器人的转弯协调控制方法中,所述S2中多个所述农业机器人的多个工作阶段包括:
T1地头等待转弯,所述农业机器人到达地头起始线,升起作业机等待转弯;
T2第一直角转弯,所述农业机器人由纵向田地进行90°转弯至横向地头;
T3横向地头直行,所述农业机器人在横向地头直行至下一工作位置;
T4第二直角转弯,所述农业机器人由横向地头进行90°转弯至纵向田地;
T5地头转弯结束,所述农业机器人降下作业机,并沿当前工作路径直线行驶作业。
在上述的多农业机器人的转弯协调控制方法中,所述三让原则包括:
原则一,在多个农业机器人转弯过程中,左侧农业机器人停止避让右侧农业机器人;
原则二,在多个农业机器人转弯过程中,待转弯的农业机器人停止避让横向地头直行过程中的农业机器人;
原则三,在同一条纵向田地工作的多个农业机器人,后方的农业机器人停止避让前方的农业机器人。
在上述的多农业机器人的转弯协调控制方法中,所述农业机器人根据三让原则在地头转弯过程中包括以下步骤:
S31,所述农业机器人到达地头起始线,进入T1地头等待转弯阶段,升起作业机等待转弯;
S32,判断右侧两米范围内是否有待转弯农业机器人,如果有待转弯农业机器人,则返回S31继续等待转弯,否则进入S33;
S33,判断前方地头是否有处于T3横向地头直行的农业机器人,如果有处于T3横向地头直行的农业机器人,则返回S31继续等待转弯,否则进入S34;
S34,农业机器人进入T2第一直角转弯阶段,由纵向田地进行90°转弯至横向地头;
S35,计算下一工作位置的距离,农业机器人进入T3横向地头直行阶段,在地头上向前或向后直行至下一工作位置;
S36,农业机器人进入T4第二直角转弯阶段,农业机器人由横向地头进行90°转弯至纵向田地,并在地头起始线等待;
S37,判断前方两米范围内是否有处于T5地头转弯结束阶段的农业机器人,如果有处于T5地头转弯结束阶段的农业机器人,则返回S35继续等待,否则进入S37;
S38,所述农业机器人完成地头转弯,进入T6地头转弯结束阶段,降下作业机,并沿当前工作路径直线行驶作业。
另一方面,本发明实施例提供一种多农业机器人的转弯协调控制装置,包括:
GPS定位模块,用于收集多个农业机器人的数据信息,所述数据信息包括各个农业机器人的编号、所处位置和行进方向;
信号传输模块,分别与所述GPS定位模块和中央处理模块连接,用于将所述GPS定位模块收集的数据信息传输至中央处理模块;
中央处理模块,用于根据数据信息将多个运行状态的所述农业机器人分为多个工作阶段,对多个农业机器人的数据信息、工作阶段和三让原则分析对比后,将控制信息发送至自动驾驶模块;
自动驾驶模块,根据所述中央处理模块传输的控制信息,协调控制多个所述农业机器人进行有序掉头转弯。
所述自动驾驶模块包括单片机、行走机构和作业机控制机构,所述行走机构为三角履带轮行走机构。
所述作业机控制机构包括固定安装在农业机器人上的壳体,所述壳体的上方设有水平的翼板,所述翼板的下表面固定连接有压杆,所述压杆的下端延伸至壳体内,所述壳体的内侧壁上转动连接有摆杆,所述摆杆的一端固定连接有防撞球,所述防撞球位于压杆的正下方,所述摆杆的另一端设有按压凸起,所述壳体的内底面安装有与按压凸起匹配的按钮开关,当压杆远离摆杆时,所述按压凸起按压在按钮开关上;
所述壳体内设有竖直的挡板,所述挡板的侧壁上滑动连接有升降板,所述升降板通过复位弹簧与壳体的内底面固定,所述升降板的上表面安装有铁块和第一接电触头,所述壳体的侧壁上固定有安装板,所述安装板的底面安装有与第一接电触头匹配的第二接电触头,所述作业机通过第一接电触头和第二接电触头与农业机器人电源电性连接,所述铁块的正上方设有电磁铁,所述电磁铁固定连接在壳体的内顶面,所述电磁铁通过按钮开关与农业机器人电源电性连接。
所述挡板上固定连接有水平的滑槽,所述滑槽内滑动有隔磁板,所述隔磁板通过拉伸弹簧与滑槽的内壁固定连接,所述隔磁板的一端贯穿挡板并固定连接有配重块。
与现有的技术相比,本多农业机器人的转弯协调控制方法及装置的优点在于:
1、本发明通过收集多个农业机器人的数据信息,并根据三让原则,协调控制多个农业机器人依次进入各个工作阶段,即实现协调多个农业机器人有序转弯掉头,避免发生碰撞、追尾等问题,实现控制多个农业机器人同时安全作业,从而大大减少了人力的使用,提高了农业生产效率。
2、本发明通过设置作业机控制机构,使作业机在等待转弯和转弯过程中停止工作,避免作业机在地头转弯过程中作无用功,降低了农业机器人在工作时的能源消耗率,降低成本,并且,无需人为控制作业机的启停,自动化高,进一步减少人力的使用,有效提高作业效。
附图说明
图1是本发明提供的一种多农业机器人的转弯协调控制方法的流程示意图;
图2是本发明提供的一种多农业机器人的转弯协调控制方法中转弯过程的流程示意图;
图3是本发明提供的一种多农业机器人的转弯协调控制方法中农业机器人各工作阶段的位置和方向示意图;
图4是本发明提供的一种多农业机器人的转弯协调控制方法的根据三让原则中原则一的协调控制示意图;
图5是本发明提供的一种多农业机器人的转弯协调控制方法的根据三让原则中原则二的协调控制示意图;
图6是本发明提供的一种多农业机器人的转弯协调控制方法的根据三让原则中原则三的协调控制示意图;
图7是本发明提供的一种多农业机器人的转弯协调控制装置的结构示意图;
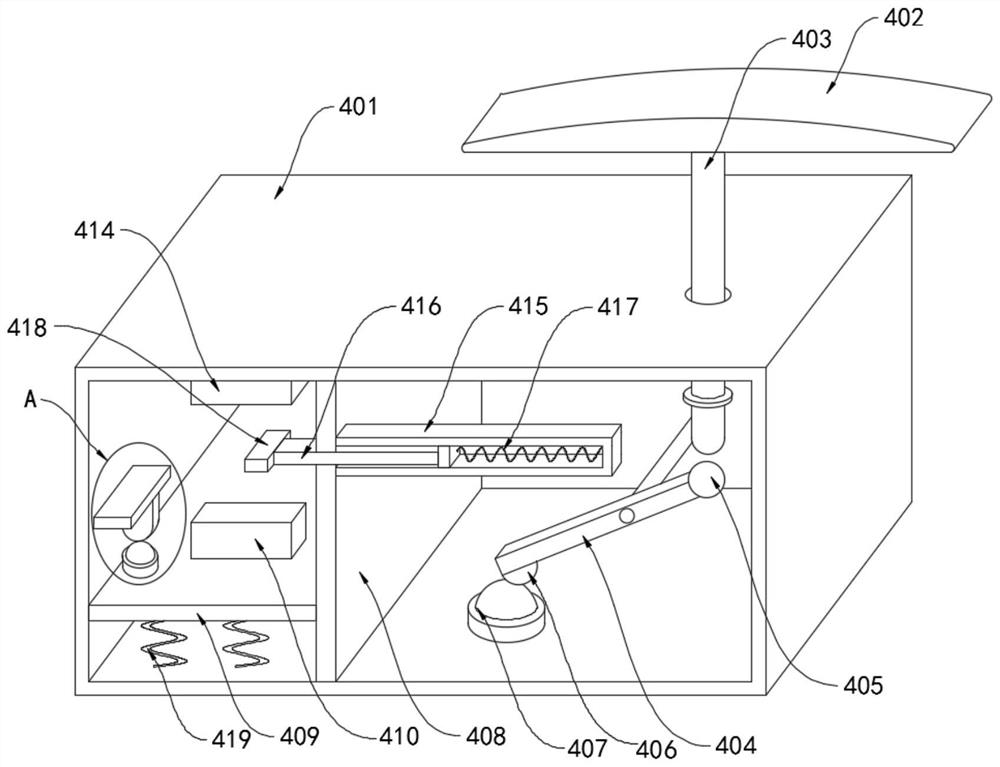
图8是本发明提供的一种多农业机器人的转弯协调控制装置中作业机控制机构的外部结构示意图;
图9是本发明提供的一种多农业机器人的转弯协调控制装置中作业机控制机构的内部结构示意图;
图10是图9中A处放大图。
具体实施方式
以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
实施例1
如图1-6所示,一种多农业机器人的转弯协调控制方法,包括以下步骤:
S1,GPS定位模块收集多个农业机器人的数据信息,所述数据信息包括各个农业机器人的编号、所处位置和行进方向;
S2,通过信号传输模块将GPS定位模块收集的多个所述农业机器人的数据信息传输至中央处理模块,所述中央处理模块根据数据信息将多个运行状态的农业机器人分为多个工作阶段;
S3,中央处理模块根据多个所述农业机器人对应的数据信息、工作阶段和三让原则,控制待转弯农业机器人进行地头转弯或停止等待,对多个所述农业机器人进行协调转弯。
S2中多个所述农业机器人的多个工作阶段包括:
T1地头等待转弯,所述农业机器人到达地头起始线,升起作业机等待转弯;
T2第一直角转弯,所述农业机器人由纵向田地进行90°转弯至横向地头;
T3横向地头直行,所述农业机器人在横向地头直行至下一工作位置;
T4第二直角转弯,所述农业机器人由横向地头进行90°转弯至纵向田地;
T5地头转弯结束,所述农业机器人降下作业机,并沿当前工作路径直线行驶作业。
图4-6为多个农业机器人根据三让原则协调控制示意图,图4-6中箭头表示先行的农业机器人,三让原则包括:
原则一,在多个农业机器人转弯过程中,左侧农业机器人停止避让右侧农业机器人;
原则二,在多个农业机器人转弯过程中,待转弯的农业机器人停止避让横向地头直行过程中的农业机器人;
原则三,在同一条纵向田地工作的多个农业机器人,后方的农业机器人停止避让前方的农业机器人。
农业机器人在进行直角转弯时均为右转,根据三让原则在地头转弯过程中包括以下步骤:
S31,所述农业机器人到达地头起始线,进入T1地头等待转弯阶段,升起作业机等待转弯;
S32,判断右侧两米范围内是否有待转弯农业机器人,如果有待转弯农业机器人,则返回S31继续等待转弯,否则进入S33;
S33,判断前方地头是否有处于T3横向地头直行的农业机器人,如果有处于T3横向地头直行的农业机器人,则返回S31继续等待转弯,否则进入S34;
S34,农业机器人进入T2第一直角转弯阶段,由纵向田地进行90°转弯至横向地头;
S35,计算下一工作位置的距离,农业机器人进入T3横向地头直行阶段,在地头上向前或向后直行至下一工作位置;
S36,农业机器人进入T4第二直角转弯阶段,农业机器人由横向地头进行90°转弯至纵向田地,并在地头起始线等待;
S37,判断前方两米范围内是否有处于T5地头转弯结束阶段的农业机器人,如果有处于T5地头转弯结束阶段的农业机器人,则返回S35继续等待,否则进入S37;
S38,所述农业机器人完成地头转弯,进入T6地头转弯结束阶段,降下作业机,并沿当前工作路径直线行驶作业。
本实施例的工作原理如下:收集多个农业机器人的数据信息,并根据三让原则,协调控制多个农业机器人依次进入各个工作阶段,即实现协调多个农业机器人有序转弯掉头,避免发生碰撞、追尾等问题,实现控制多个农业机器人同时安全作业,从而大大减少了人力的使用,提高了农业生产效率。
实施例2
如图7-10所示,一种多农业机器人的转弯协调控制装置,包括GPS定位模块、信号传输模块、中央处理模块和自动驾驶模块。
GPS定位模块1,用于收集多个农业机器人的数据信息,所述数据信息包括各个农业机器人的编号、所处位置和行进方向;
信号传输模块2,信号传输模块采用E22-400T30S无线信号传输模块,分别与所述GPS定位模块1和中央处理模块3连接,用于将所述GPS定位模块1收集的数据信息传输至中央处理模块3;
中央处理模块3,用于根据数据信息将多个运行状态的所述农业机器人分为多个工作阶段,对多个农业机器人的数据信息、工作阶段和三让原则分析对比后,将控制信息发送至自动驾驶模块4;
自动驾驶模块4,根据所述中央处理模块3传输的控制信息,协调控制多个所述农业机器人进行有序掉头转弯。
每个农业机器人中均安装有GPS定位模块1、信号传输模块2和自动驾驶模块4,每个农业机器人中的GPS定位模块1提供该农业机器人所处位置和行进方向的信息,通过信号传输模块2传输至中央处理器3中,中央处理器3根据三让原则分析对比信息后,将控制信息传输至自动驾驶模块4,自动驾驶模块4根据中央处理器3的控制信息控制各个农业机器人继续行进或停止避让,从而使得多农业机器人有序协调转弯,避免发生碰撞、追尾等问题,实现控制多个农业机器人同时安全作业,从而大大减少了人力的使用,提高了农业生产效率。
所述自动驾驶模4块包括单片机、行走机构和作业机控制机构,所述行走机构为三角履带轮行走机构,三角履带轮行走机构为现有技术,不作过多赘述。
所述作业机控制机构包括固定安装在农业机器人上的壳体401,所述壳体401的上方设有水平的翼板402,需要说明的是,翼板402的上表面呈向上拱起的弧线形,下表面为水平面,所述翼板402的下表面固定连接有压杆403,所述压杆403的下端延伸至壳体401内,所述壳体401的内侧壁上转动连接有摆杆404,所述摆杆404的一端固定连接有防撞球405,所述防撞球405位于压杆403的正下方,所述摆杆404的另一端设有按压凸起406,所述壳体401的内底面安装有与按压凸起406匹配的按钮开关407,当压杆403远离摆杆404时,所述按压凸起406按压在按钮开关407上。
所述壳体401内设有竖直的挡板408,所述挡板408的侧壁上滑动连接有升降板409,所述升降板409通过复位弹簧419与壳体401的内底面固定,所述升降板409的上表面安装有铁块410和第一接电触头411,所述壳体401的侧壁上固定有安装板412,所述安装板412的底面安装有与第一接电触头411匹配的第二接电触头413,所述作业机通过第一接电触头411和第二接电触头413与农业机器人电源电性连接,需要注意的是,复位弹簧419在自然状态时,第一接电触头411与第二接电触头413不接触,所述铁块410的正上方设有电磁铁414,所述电磁铁414固定连接在壳体401的内顶面,所述电磁铁414通过按钮开关407与农业机器人电源电性连接。
所述挡板408上固定连接有水平的滑槽415,所述滑槽415内滑动有隔磁板416,隔磁板416由隔磁材料制成,所述隔磁板416通过拉伸弹簧417与滑槽415的内壁固定连接,所述隔磁板416的一端贯穿挡板408并固定连接有配重块418,需要说明的是,拉伸弹簧417在自然状态时,隔磁板416完全处于滑槽415内,农业机器人在转弯过程中,配重块418受到的离心力较大,将隔磁板416拉出滑槽415外,则此时隔磁板415插入电磁铁414和铁块410间,起到隔磁作用。
当农业机器人在纵向田地直线行走工作过程中,根据伯努利原理可知,翼板将受到向上的气压作用,带动压杆向上远离摆杆,则此时按压凸起406按压在按钮开关407上,电磁铁通电并吸引铁块靠近,则升降板带动第一接电触头上移并与第二接电触头接触,作业机正常工作。
当农业机器人在地头停止等待转弯时,翼板受重力作用下落,压杆带动摆杆转动,使按压凸起上升并离开按钮开关表面,则电磁铁断电,对磁铁的磁吸力消失,复位弹簧拉动升降板下移,使第一接电触头和第二接电触头脱离,则作业机停止工作,避免作业机在地头等待过程中作无用功,降低了农业机器人在工作时的能源消耗率,降低成本,并且,无需人为控制作业机的启停,自动化高,进一步减少人力的使用,有效提高作业效。
在农业机器人转弯过程中,在离心力作用下,配重块418受到的离心力较大,将隔磁板416拉出滑槽415外,则此时隔磁板415插入电磁铁414和铁块410间,起到隔磁作用,避免作业机在地头转弯过程中作无用功,进一步降低能源浪费消耗。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种多农业机器人的转弯协调控制方法及装置
- 一种多农业机器人的转弯协调控制方法及装置