一种接触物体间的磨损量预测方法和装置
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及物体磨损量预测领域,具体涉及一种接触物体间的磨损量预测方法和装置。
背景技术
在机械传动技术领域和数控精加工技术领域,传动结构的磨损量损耗极大的影响了传动效率和加工精度,例如数控磨床中的伺服电机常通过联轴器带动丝杆转动来带动砂轮前进和后退,伺服电机的电机轴与联轴器的连接面会随着使用时间的增加出现磨损,如果伺服电机的电机轴与联轴器之间出现缝隙,会影响伺服电机的传动效率,即伺服电机在正转或者反转时需先转动一段距离才能带动丝杆前进或者后退,而这段距离会影响加工精度。因此如果能提前预测接触物体间的磨损量,对于机械结构的改进和维护都至关重要。
发明内容
鉴于背景技术的不足,本发明是提供了一种接触物体间的磨损量预测方法,用于预测接触物体间的磨损量。
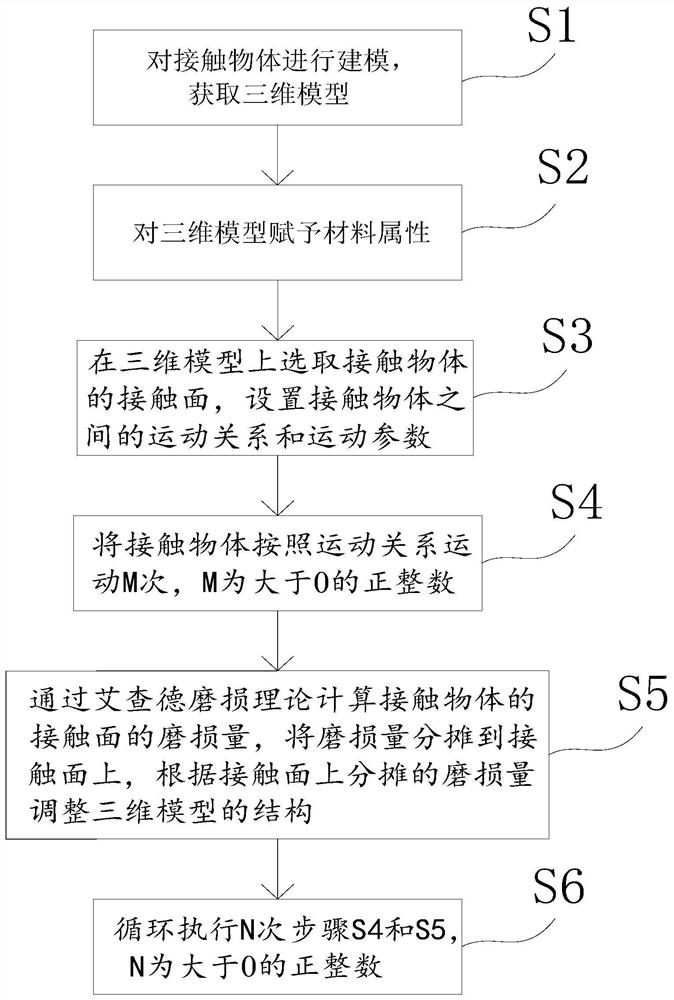
为解决以上技术问题,本发明提供了如下技术方案:一种接触物体间的磨损量预测方法,包括以下步骤:
S1:对接触物体进行建模,获取三维模型;
S2:对三维模型赋予材料属性;
S3:在三维模型上选取接触物体的接触面,设置接触物体之间的运动关系和运动参数;
S4:将所述接触物体按照所述运动关系运动M次,M为大于0的正整数;
S5:通过艾查德磨损理论计算接触物体的接触面的磨损量,将所述磨损量分摊到所述接触面上,根据接触面上分摊的磨损量调整所述三维模型的结构;
S6:循环执行N次步骤S4和S5,N为大于0的正整数。
作为进一步的技术方案,步骤S3中先将三维模型划为有限元个网格,选取的接触面包括若干个网格,每个网格的边界的交点为一个节点。
作为进一步的技术方案,步骤S6中,根据接触面上分摊的磨损量来调整接触面上的网格的节点深度,通过调节接触面上的网格的节点深度来调整三维模型的结构。
作为进一步的技术方案,运动关系包括滑动和转动。
作为进一步的技术方案,运动参数包括迭代次数X、磨损系数K、硬度系数H、接触压力P和运动距离L,迭代次数X的数值与M相同。
作为进一步的技术方案,步骤S6中通过艾查德磨损理论计算接触物体的接触面的磨损量的具体步骤如下:先计算出接触物体的接触面的磨损率Q,其中Q=(K*P*L)/H,然后将磨损率Q乘以接触物体沿接触面垂直方向的厚度D得到磨损量。
作为进一步的技术方案,运动参数还包括平均半径R,当接触物体的接触面在同一个球面上且该球面的半径为R,这时半径为R的球面内的所有节点的接触压力被取平均值。
一种接触物体间的磨损量预测装置,包括建模单元、材料属性设置单元、模型处理单元、参数设置单元、磨损量计算单元和修改单元,建模单元用于对接触物体进行建模,生成三维模型,材料属性设置单元用于设置三维模型的材料属性,模型处理单元用于将三维模型划分为有限个网格,以及在有限个网格中选取若干个网格,若干个网格为接触物体的接触面,参数设置单元用于设置接触物体之间的运动关系和运动参数,磨损量计算单元用于计算接触物体执行完M次运动关系后的磨损量,修改单元根据磨损量修改接触面上的网格的节点深度。
本发明与现有技术相比所具有的有益效果是:通过对接触物体进行建模生成三维模型,以及采用有限元的方法将三维模型划分为有限个网格,通过对这些网格进行仿真分析,可以获取接触物体的接触面在实际使用时的磨损量,方便机械结构的改进和维护,另外通过将磨损量分摊到接触面上,能够让技术人员了解到接触物体随着使用时间或者次数的增加其本体的厚度或者结构的变化状况。
附图说明
本发明有如下附图:
图1为本发明的预测方法的流程图;
图2为本发明的预测装置的结构图;
图3为实施例中的木板与滑块的结构示意图。
具体实施方式
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
如图1所示,一种接触物体间的磨损量预测方法,包括以下步骤:
S1:对接触物体进行建模,获取三维模型;
S2:对三维模型赋予材料属性;
S3:在三维模型上选取接触物体的接触面,设置接触物体之间的运动关系和运动参数;
S4:将所述接触物体按照所述运动关系运动M次,M为大于0的正整数;
S5:通过艾查德磨损理论计算接触物体的接触面的磨损量,将所述磨损量分摊到所述接触面上,根据接触面上分摊的磨损量调整所述三维模型的结构;
S6:循环执行N次步骤S4和S5,N为大于0的正整数。
具体地,本实施例中,步骤S3中先将三维模型划为有限元个网格,选取的接触面包括若干个网格,每个网格的边界的交点为一个节点。
具体地,本实施例中,步骤S6中,根据接触面上分摊的磨损量来调整接触面上的网格的节点深度,通过调节接触面上的网格的节点深度来调整三维模型的结构。
具体地,本实施例中,运动关系包括滑动和转动。
具体地,本实施例中,运动参数包括迭代次数X、磨损系数K、硬度系数H、接触压力P和运动距离L,迭代次数X的数值与M相同。
具体地,本实施例中,步骤S6中通过艾查德磨损理论计算接触物体的接触面的磨损量的具体步骤如下:先计算出接触物体的接触面的磨损率Q,其中Q=(K*P*L)/H,然后将磨损率Q乘以接触物体沿接触面垂直方向的厚度D得到磨损量。
具体地,本实施例中,运动参数还包括平均半径R,当接触物体的接触面在同一个球面上且该球面的半径为R,这时半径为R的球面内的所有节点的接触压力被取平均值。
在实际使用时,通过对接触物体建立三维模型,然后设置接触物体之间的运动关系和运动参数,每当接触物体按照运动关系执行完一次运动后,通过艾查德磨损理论计算接触物体在执行完一次运动后的磨损量,接着根据该磨损量调整三维模型的结构,这样能够让技术人员了解到接触物体即机械结构在实际使用时的磨损量,以及磨损量对整个机械结构的改变状况。
如图3所示,以预测木板与在木板上滑动的滑块的磨损量为例,先根据木板和滑块的实际结构进行建模,然后赋予木板和滑块的材料属性,使木板与滑动的磨损量消耗与实际相同,接着设置滑块在木板上的滑动次数即迭代次数、滑动距离、木板与滑块之间的摩擦系数、滑块对木板的压力,每当滑块在木板上滑动一次即从A滑动到B或者从B滑动到A,通过艾查德磨损理论计算滑块在木板上滑动一次后的磨损量,然后根据该磨损量调整木板和滑块的三维模型,另外在实际使用时也可以在滑块在木板上滑动多次后再通过艾查德磨损理论计算滑块在木板上滑动多次后的磨损量。
如图2,所示,一种接触物体间的磨损量预测装置,包括建模单元、材料属性设置单元、模型处理单元、参数设置单元、磨损量计算单元和修改单元,建模单元用于对接触物体进行建模,生成三维模型,材料属性设置单元用于设置三维模型的材料属性,模型处理单元用于将三维模型划分为有限个网格,以及在有限个网格中选取若干个网格,若干个网格为接触物体的接触面,参数设置单元用于设置接触物体之间的运动关系和运动参数,磨损量计算单元用于计算接触物体执行完M次运动关系后的磨损量,修改单元根据磨损量修改接触面上的网格的节点深度
上述依据本发明为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
- 一种接触物体间的磨损量预测方法和装置
- 一种研究手与物体接触间摩擦系数和接触面积之间关系的方法与装置