电网调度自动化机房运维作业用陪伴工具车的工作方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及电力设备技术领域,尤其是涉及一种电网调度自动化机房运维作业用陪伴工具车的工作方法。
背景技术
目前,自动化信息机房巡检机器人、管理机器人等相关产品,已经基本成熟,但是现有自动化信息机房巡检机器人局限于设备指示灯告警、机房环境、安防、人员出入管理等功能;管理机器人基本功能是机房环境、安防、人员出入、工作许可管理等。
随着电网调度自动化机房业务需求的不断新增,大规模的IT设备以及为保障IT设备正常运行而投入的附属设备不断增加,导致电网调度自动化机房的维护工作量上升,目前市场上并没有工作全过程陪伴,且能提供常用备品备件、运维笔记本电脑的智能机器人工具车的相关产品。
发明内容
本发明的目的是提出了一种电网调度自动化机房运维作业用陪伴工具车的工作方法,能够自动陪伴并跟踪摄录工作全过程。
为实现上述目的本发明采用如下技术方案:电网调度自动化机房运维作业用陪伴工具车的工作方法,所述陪伴工具车与向其发送控制指令的上位机通信连接,其特征在于,该方法包括如下步骤:
第一步:创建工作任务:在所述上位机内创建工作票,工作票的信息包括工作任务、工作名称、作业单位、作业人员,并将所述工作票发送给所述陪伴工具车,同时向所述陪伴工具车发送启动作业指令;
第二步:陪伴工具车响应启动作业指令,并根据其接收到的工作票获取工作任务,确定作业点;
第三步:作业人员通过所述陪伴工具车上的触控屏向陪伴工具车输入工作导航指令,陪伴工具车响应工作导航指令,根据其接收到的当前工作任务自主导航到达作业点,到达作业点位置后,启动其自身的网络摄像头进行录像,同时所述陪伴工具车检查其内部工具是否完备,工具完备则转为作业启动状态;
第四步:工作完成:工作任务完成后,作业人员通过所述触控屏向陪伴工具车输入结束工作指令,陪伴工具车响应结束工作指令并检测其内部工具,判断是否遗失,无遗失则停止录像,结束工作;
第五步:返航或回充:作业人员通过所述触控屏向陪伴工具车输入工作完成指令,陪伴工具车接收工作完成指令后自主导航,回到原始充电桩位置,进行充电。
进一步,所述陪伴工具车自主导航到达作业点的实现过程如下:
预先建立机房平面地图,并存储于设置在陪伴工具车内部的激光雷达导航模块中;
将机房平面地图上所有预发生工作任务的地点标记为作业点,一个工作任务关联一个作业点,执行工作任务时,激光雷达导航模块采用常规激光雷达导航技术,自主构建地图并规划路径行走至作业点。
通过上述设计方案,本发明可以带来如下有益效果:本发明提出的电网调度自动化机房运维作业用陪伴工具车的工作方法,能够自动陪伴跟踪摄录运维工作全过程,实现上位机安全管控和智能管理工器具等功能。
进一步的有益效果为:本发明采用激光雷达导航技术,将机房所有可能的作业点进行平面网格化,并将网格坐标存储成导航矢量图,实现地标的精准导航。
附图说明
此处的附图说明用来提供对本发明的进一步理解,构成本发明申请的一部分,本发明示意性实施例及其说明用于理解本发明,并不构成本发明的不当限定,在附图中:
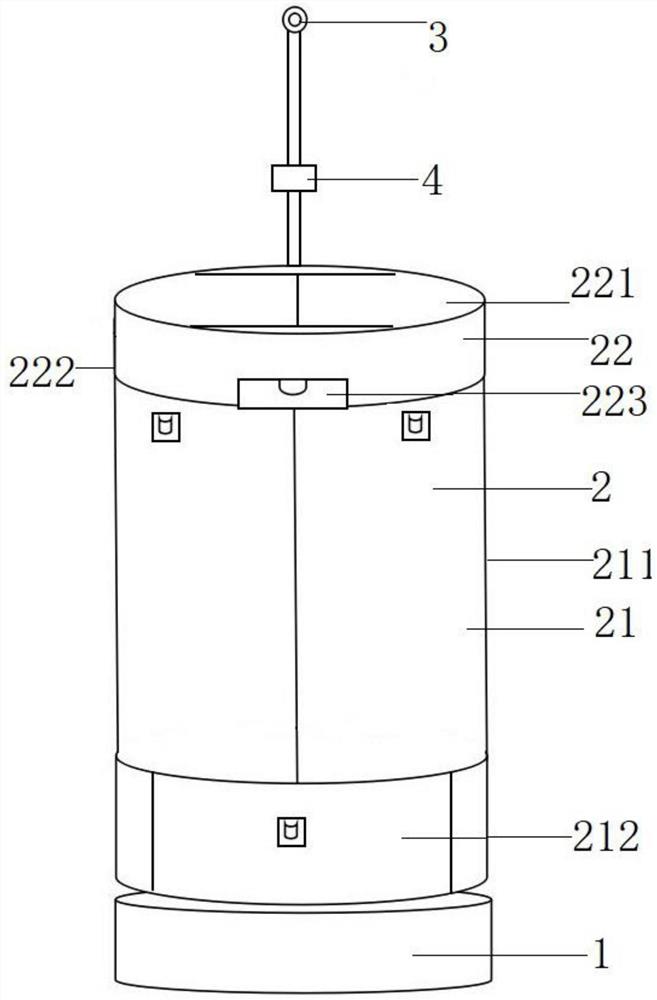
图1为本发明实施例中电网调度自动化机房运维作业用陪伴工具车的整体外部结构示意图;
图2为本发明实施例中动力驱动导航底盘的内部部件与控制主机的连接关系结构框图;
图3为本发明实施例中操作台的俯视图;
图4为本发明实施例中操作台的上层操作台展开状态图;
图中:1-动力驱动导航底盘;11-电动机;12-主电池;13-辅电池;14-充电模块;15-激光雷达导航模块;16-无线路由器;2-工具车车体;21-电子工具箱;211-工具仓;212-控制仓;22-操作台;221-上层操作台;2211-第一上层操作分台;2212-第二上层操作分台;222-下层操作台;2221-长方形凹槽;223-垃圾收集盒。
在本发明的描述中,在所有附图中相同的标号指示相似或相应的特征或功能。
具体实施方式
为了更清楚地说明本发明,下面结合具体实施例,进一步阐述本发明,本领域技术人员应当理解;下面所具体描述的内容是说明性的而非限制性的,不应以此限制本发明的保护范围,且本发明中未述及之处适用于现有技术。
请参阅图1、图2、图3和图4,本发明中所述的电网调度自动化机房运维作业用陪伴工具车,包括:动力驱动导航底盘1和工具车车体2。
所述动力驱动导航底盘1的底部设置有驱动轮,动力驱动导航底盘1内部设置有电动机11、主控电路板以及连接在主控电路板上的主电池12、辅电池13、充电模块14、激光雷达导航模块15和无线路由器16,电动机11的电源端与主电池12连接,电动机11的输出端与驱动轮连接,从而实现陪伴工具车的行走或停靠;
所述充电模块14电性连接所述主电池12以及所述辅电池13,同时充电模块14电性连接于外部充电桩,以接收所述充电桩的电源输入信号,而对所述主电池12以及所述辅电池13进行充电。
所述主电池12和辅电池13构成所述陪伴工具车电源,为了保证电网调度自动化机房运维作业用陪伴工具车更长时间的续航,主电池12实际采用了较大容量的锂电池,并且配置了辅电池13。辅电池13为UPS不间断电源,辅电池13作为陪伴工具车整套控制系统的电源;辅电池13与主电池12同步充电,共用同一个充电桩;同时在陪伴工具车现场作业过程中,当辅电池13电量不足时,可自动从主电池12充电。
陪伴工具车电源通过变压可作为移动电源供现场作业使用(如:为运维笔记本电脑、电烙铁等供电)
(1)主电池12:
用途:整机动力电源、外接负载(可降压使用);
容量:20AH,24V(24-27V);
续航时间:>8小时;
负载:平均电流<2A,连接设备:动力驱动导航底盘1、运维笔记本电脑、电烙铁等;
满充时长:<4小时;
充电桩输入:220V交/直流;
电源输出:24V(5A),12V(2A);
有效充电次数:>2000次;
(2)辅电池13:
用途:整机控制系统电源;
容量:8AH,12V(10-14V);
续航时间:>10小时,可在线从主电池12充电;
负载:平均电流<1A,连接设备:控制主机、电子标签扫码器、网络交换机、网络摄像头3、触控屏4等;
满充时长:<3小时;
有效充电次数:>1000次;
(3)电池维护:
主电池12和辅电池13的适用环境温度(0~40℃);适应于自动化机房;
非记忆锂电池,可随时充电;
主电池12和辅电池13均方便更换;
充电桩为标准220V/24V,故障时可另配或维修。
所述激光雷达导航模块15通过激光雷达对自动化机房室内环境进行扫描,自主构建地图并自主规划路径行走。
激光雷达导航属于现有技术,是通过360度旋转雷达对周围10米以内平面空间进行扫描,并生成平面地图;根据雷达扫描出来的平面地图结合碰撞、沿墙等不同的传感器取得的数据来进行自主定位、导航、路径规划等SLAM算法。
所述工具车车体2固定在动力驱动导航底盘1上,工具车车体2整体呈圆柱形,工具车车体2包括电子工具箱21和操作台22,操作台22固定在电子工具箱21顶部,电子工具箱21通过中间隔板分成上下两部分,上部分为工具仓211,下部分为控制仓212,其中控制仓212的仓体侧壁上设置有开口,并在开口处安装有用于打开或关闭所述开口的控制仓仓门,控制仓212内部设置有控制主机和网络交换机,网络交换机为局域网交换机,用于构建局域网,网络交换机通过网线与控制主机以及动力驱动导航底盘1内的无线路由器16相连,网络交换机的电源端口与辅电池电性连接;控制主机与动力驱动导航底盘1内部的辅电池13、充电模块14、激光雷达导航模块15和无线路由器16连接,控制主机采用基于ARM9硬件平台的嵌入式Linux操作系统,同时控制主机内置有4G路由器和语音模块,控制主机内置的语音模块能够实现音频播放,控制主机内置4G路由器,可插入SIM卡,接入公网,将陪伴工具车运维视频上传至云平台,用户可通过手机安装的云平台软件APP查看运维视频。控制主机的主要参数为主频300HZ、运行内存2GB、FLASH电子盘>2TB(可连续保存5年的运行数据和2年的视频录像)、控制主机的通信接口包括SIM接口、WIFI接口、4*RS232串口和2*100MB局域网LAN口;控制主机与上位机通过无线路由器16连接在同一局域网内,上位机为调试专用电脑即运维笔记本电脑,不可与外部网络相连,导航软件编制为手机端和电脑端两个版本,手机也可连接无线路由器16,可用于控制陪伴工具车的行动;工具仓211用于存放设有电子标签的工具,工具仓211的仓体上设有两扇对开的第一仓门和第二仓门,第一仓门和第二仓门相对的一侧为开合侧,第一仓门和第二仓门相互远离的一侧均通过合页与工具仓211的仓体铰接,第一仓门和第二仓门上均安装有按压式弹簧卡扣锁,通过按动第一仓门上的按压式弹簧卡扣锁打开第一仓门,通过按动第二仓门上的按压式弹簧卡扣锁打开第二仓门,工具仓211内部空间沿竖直方向通过分隔板分隔为至少两层,且每层分为左右两个室,同时每层通过隔板形成工具存放位,每层顶部安装有射频天线,射频天线采用RFID陶瓷天线,射频天线的输出端连接到电子标签扫码器的射频输入口,射频天线用于感应接收工具上的电子标签信号,并将感应接收到的电子标签信号传输给电子标签扫码器,电子标签扫码器的输出端与控制主机串口连接,电子标签扫码器的电源端与辅电池13电性连接,控制主机策略调度或触发实时扫描电子标签,当工具被取出离开工具存放位时,状态信息被采集,并形成完整的工具领用时间日志,当工作任务结束后,检测、统计工具状况,异常(未归还)触发记录或告警。
本发明中的控制主机具有导航控制、任务管理、工具管理、网络录像、信息存储、警告和查询等功能。
本发明中电子工具箱21内部结构材料使用较轻的铝合金、支撑框架材料使用合金钢、所有外部仓门材料采用锻压铁皮。
所述操作台22包括上层操作台221、下层操作台222和垃圾收集盒223,上层操作台221由相互独立的第一上层操作分台2211和第二上层操作分台2212组成,第一上层操作分台2211和第二上层操作分台2212结构一致且对称设置,第一上层操作分台2211和第二上层操作分台2212的下方设置有毛刷,第一上层操作分台2211和第二上层操作分台2212通过滑轨分别与下层操作台222滑动连接,在所述下层操作台222的中间位置设有长方形凹槽2221,长方形凹槽2221下方直通垃圾收集盒223,垃圾收集盒223设置在下层操作台222内,且采用抽屉式结构,用于收集机房工作时产生的细小垃圾,垃圾收集盒223,便于抽取,易于操作。
根据日常机房工作为例,详细的阐述操作台22的使用方法:
S1、通过两层操作台之间的滑轨拉开上层操作台221,使第一上层操作分台2211和第二上层操作分台2212分开,在下层操作台222上进行工作,包括制作网线、2M线缆Q9头焊接等;
S2、工作结束后,闭合打开的上层操作台221,因其下方安装有毛刷,在闭合时可将工作后产生的垃圾细小裸线头、铜丝等扫入下层操作台222的长方形凹槽2221内;
S3、当完全闭合上层操作台221时,工作时产生的细小垃圾,会通过上层操作台221底部的毛刷被扫入长方形凹槽2221,直接落入下方安装的垃圾收集盒223。
操作台22的优点是:1、使用方便,操作简单;2、无尘作业,安全性高。
本发明中的操作台22的自动清扫功能,避免工作产生的导电物质、粉尘造成机器故障的可能。
所述操作台22的上部安装有立柱,并在立柱的顶端安装有网络摄像头3,网络摄像头3与网络交换机连接接入局域网,网络摄像头3可360度对作业过程和场景进行录像,同时在立柱上还安装有与控制主机通信连接的触控屏4,网络摄像头3和触控屏4的电源端均与辅电池13连接,本发明的目的是要作为对无人值班监控系统的功能补充,具有更好的实际意义,自动陪伴跟踪摄录工作全过程。
需要说明的是,本发明中的各个器件和/或模块就单体而言,其实现各自应实现功能的具体结构在现有技术中已经存在,各个器件和/或模块进行工作处理时所涉及的协议、软件或程序也在现有技术中已经存在,本领域人员已充分知晓。
应用时建立机房平面地图(机房平台栅格化坐标图),机房平面地图存储到激光雷达导航模块15地图库中,并将机房平面地图上所有可能发生工作任务的地点标记为作业点,工作任务即运维任务,一个工作任务关联一个作业点,执行工作任务时,将作业点发送给激光雷达导航模块15,激光雷达导航模块15自主导航或由控制主机控制导航到作业点并刹车稳定动力驱动导航底盘1。
具体电网调度自动化机房运维作业用陪伴工具车的工作流程:
第一步:创建工作任务:在所述上位机内创建工作票,工作票的信息包括工作任务、工作名称、作业单位、作业人员,并将所述工作票发送给所述陪伴工具车,同时向所述陪伴工具车发送启动作业指令;
第二步:陪伴工具车响应启动作业指令,并根据其接收到的工作票获取工作任务,确定作业点;
第三步:作业人员通过所述陪伴工具车上的触控屏4向陪伴工具车输入工作导航指令,陪伴工具车响应工作导航指令,根据其接收到的当前工作任务自主导航到达作业点,到达作业点位置后,启动其自身的网络摄像头3进行录像,同时陪伴工具车检查其内部工具是否完备,工具完备则转为作业启动状态;
第四步:工作完成:工作任务完成后,作业人员通过所述触控屏4向陪伴工具车输入结束工作指令,陪伴工具车响应结束工作指令并检测其内部工具,判断是否遗失,无遗失则停止录像,结束工作;
第五步:返航或回充:作业人员通过所述触控屏4向陪伴工具车输入工作完成指令,陪伴工具车接收工作完成指令后自主导航,回到原始充电桩位置,进行充电。
任务结束,陪伴工具车转为空闲状态;空闲状态可以人工控制导航移动或执行“工具车任务”,如巡视。
本发明利用雷达导航技术,将机房所有可能的作业点进行平面网格化,并将网格坐标存储成导航矢量图,实现地标的精准导航。动力驱动导航底盘1作为陪伴工具车的基础平台,平台兼负导航和自充电两样功能,其它应用功能通过在基础平台上设计搭建的功能箱体完成。
- 电网调度自动化机房运维作业用陪伴工具车的工作方法
- 电网调度自动化机房运维作业用智能陪伴工具车