打入机
文献发布时间:2023-06-19 11:47:31
本发明是申请号为201680024788.7(国际申请号为PCT/JP2016/060935)、发明名称为“打入机”、申请日为2016年4月1日的发明申请的分案申请。
技术领域
本发明涉及用于将钉子、卡钉等固定件打入被打入部件的打入机。
背景技术
就用于将钉子等固定件打入木材等被打入部件的打入机而言,其具有将固定件从打入机的射出口打出的打击头。在以压缩空气为打击头的驱动源的打入机中,打击头被活塞驱动。若打击头被驱动,则固定件被打击头打入被打入部件。打入机具有容纳多个固定件的匣盒,固定件被从匣盒向打击头的前方送出。专利文献1记载了具有活塞的打入机。该活塞具有圆筒部和端壁部,且以能自由往复移动的方式被装入气缸。
专利文献1记载了一种打入机,其在气缸内装入有波纹管,该波纹管封入有压缩空气,且能够沿轴向自由伸缩。在这种打入机中,波纹管的一端部被固定于活塞的端壁部,且另一端部被固定于气缸顶部侧的外壳。专利文献1还记载了一种打入机,其由活塞和气缸形成蓄压室。在这种打入机中,在活塞的开口端设有凸缘,凸缘与气缸的内周面滑动接触。为了抵抗由波纹管、蓄压室内的压缩空气沿打出方向施加于活塞的推力使活塞向收缩方向后退移动,在活塞上卡合有被马达旋转驱动的凸轮。
现有技术文献
专利文献
专利文献1:日本特开2014-69289号公报
发明内容
发明所要解决的课题
就这种在气缸内部装入有波纹管的类型的打入机而言,打击头的打出部采用波纹管与气缸的双重构造。就这种由活塞和气缸划分出蓄压室的类型的打入机而言,打出部采用活塞与气缸的双重构造。这种双重构造的打入机的构造复杂。另外,就这种使波纹管内部的蓄压室沿轴向伸缩或者通过活塞和气缸使蓄压室膨胀收缩的打入机而言,为了确保蓄压室的容积,必须使打入机的打入方向即上下方向的尺寸较长。因此,打入机的上下尺寸变大。
在这种由活塞和气缸形成蓄压室的打入机中,为了向蓄压室内填充压缩气体,在气缸的顶部侧的端壁部装入有填充阀。端壁部被装入到外壳内部,若将填充阀装入到端壁部,则包含端壁部的气缸的长度变长,打入机的上下尺寸变大。另外,若在端壁部设置填充阀,则无法容易地使用填充阀来进行压缩气体的填充操作。
本发明的目的是避免使打入机大型化,且能够容易地向压缩室填充压缩空气。
用于解决课题的方案
本发明的打入机具备将活塞设置为自由往复移动且形成有由上述活塞划分出的活塞室的气缸,并且通过上述活塞对打出固定件的打击头进行驱动,该打入机具有:外壳,其具备容纳上述气缸的气缸壳部以及与上述气缸壳部相连的手柄部;蓄压容器,其具备向上述气缸的外方延伸的底壁部以及与上述气缸和上述底壁部对置的顶壁部,且形成与上述活塞室连通的压缩室;以及填充阀,其设置于上述底壁部并向上述压缩室填充气体。
发明效果
就形成与气缸室连通的压缩室的蓄压容器而言,其具有向气缸的径向外方延伸的底壁部,并且在气缸与气缸壳部之间的空间设有用于向压缩室填充气体的填充阀。由此,能够利用气缸与气缸壳部之间的空间将填充阀配置于外壳内,从而避免使打入机大型化且能够容易地向压缩室填充压缩空气。
附图说明
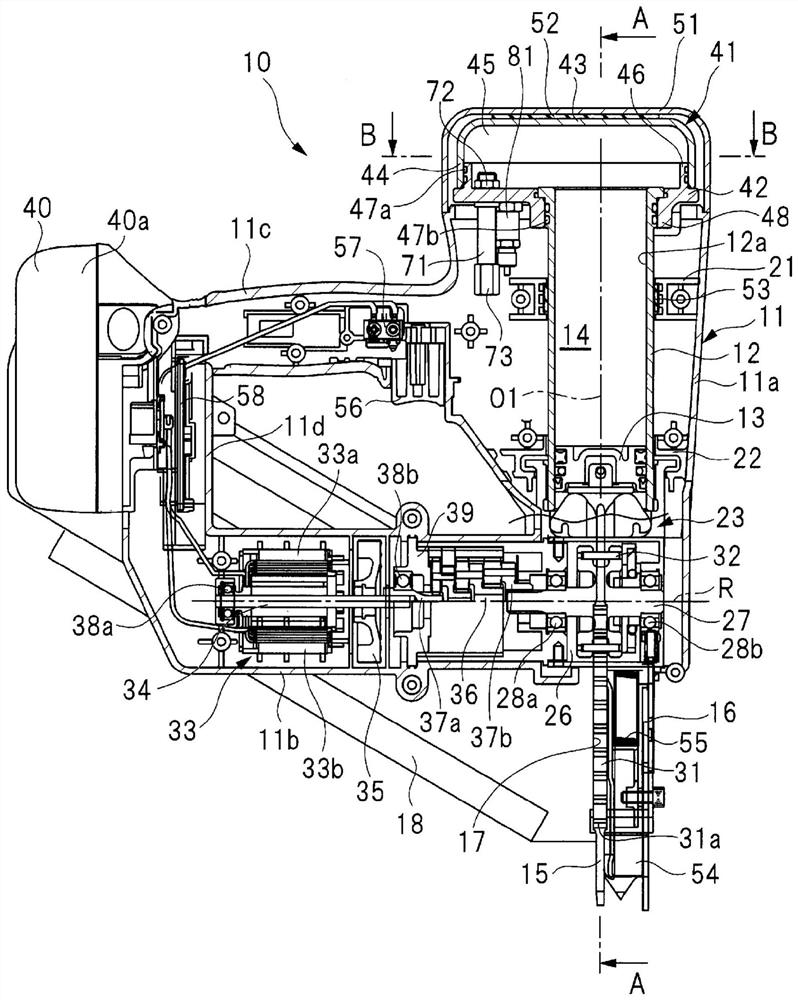
图1是从侧面观察一实施方式的打入机的剖视图,表示打击头突出的状态。
图2是图1的俯视图。
图3是图1中的A-A线剖视图。
图4是表示打击头后退移动的状态的剖视图。
图5是图1中的B-B线剖视图。
图6是变形例的打入机的局部切除的主视图。
图7是从匣盒侧观察另一变形例的打入机的局部切除的后视图。
图8是从匣盒侧观察又一变形例的打入机的局部切除的后视图。
图9是从匣盒侧观察又一变形例的打入机的局部切除的后视图。
图10是图9的C-C线剖视图。
图11是表示设于外壳的盖部件的打入机的侧视图。
图12是表示设有变形例的盖部件的打入机的局部的侧视图。
图13是表示另一实施方式的打入机的主要部分的侧面侧的剖视图。
图14是表示图13所示的蓄压容器的放大剖视图。
图15是图13中的D-D线剖视图。
图16是图13中的E-E线剖视图。
图17(A)是表示图13所示的蓄压容器的另一变形例的俯视图,(B)是(A)的F-F线剖视图。
图18(A)是表示图13所示的蓄压容器的又一变形例的俯视图,(B)是(A)的G-G线剖视图。
具体实施方式
以下参照附图对本发明的实施方式进行详细说明。在各图中对于相同的部件标记相同的符号。
图1~图5所示的打入机10具有外壳11,外壳11具备容纳气缸12的气缸壳部11a、以及与气缸壳部11a的前端部成为一体的马达壳部11b。手柄部11c沿着马达壳部11b与气缸壳部11a的顶部侧成为一体。在手柄部11c的前端部与马达壳部11b的前端部之间一体地设有连结部11d。这样,外壳11具备气缸壳部11a、马达壳部11b、手柄部11c、以及连结部11d。外壳11具有分别由尼龙或聚碳酸酯等树脂成型的两个外壳半体,并通过将两个外壳半体对接来组装外壳11。
在气缸壳部11a内容纳有气缸12,活塞13在气缸孔12a内沿着轴向自由往复移动地设置。活塞13以气缸12的图1中的上端部为顶部,并以气缸12的下端部为前端部,且在气缸12的前端部与顶部之间往复移动。利用活塞13由气缸孔12a和活塞13的顶面划分出活塞室14。在活塞13上连结打击头15,打击头15在设于外壳11的鼻部16的射出口17内被支承为沿着轴向自由往复移动。在外壳11安装有容纳多个固定件的匣盒18,匣盒18内的固定件被逐个地向射出口17供给。向射出口17供给的固定件被与活塞13连结的打击头15打入木材、石膏板等被打入部件。在进行打入操作时,作业者把持手柄部11c使气缸12朝向前方来操作打入机10。
如图2所示,马达壳部11b相对于手柄部11c向打入机10的宽度方向一方侧偏移地配置,匣盒18相对于马达壳部11b在相反侧于宽度方向上倾斜地配置。匣盒18如图1所示那样从后端部朝向前端部向下倾斜。但是,也可以使匣盒18相对于气缸12以直角配置。
在气缸壳部11a内设有:与气缸12顶部侧的外周面抵接的突起部21、与气缸12前端部侧的外周面抵接的突起部22,而气缸12则通过突起部21、22固定在气缸壳部11a内。如图3、图4所示,在气缸12的前端部安装支架23,该支架23具备端壁部23a和圆筒部23b,打击头15贯通于在端壁部23a设置的贯通孔24。
图1以及图3示出了打击头15被活塞13驱动而到达前进极限位置(下死点)的状态,图4示出了活塞13因打击头15而到达后退极限位置(上死点)的状态。为了在活塞13被驱动到气缸12的前端部时吸收活塞13的冲击,在支架23内设有橡胶制或聚氨酯制的缓冲器25。打击头15贯通于在缓冲器25设置的贯通孔24a。
为了使活塞13回到图4所示的后退极限位置,在马达壳部11b内设有旋转圆板26。旋转圆板26设于驱动轴27,驱动轴27如图1所示那样被安装于马达壳部11b的轴承28a,28b支承为自由旋转。具有多个齿条爪31a的齿条31安装于打击头15,与齿条爪31a啮合的多个销32在旋转圆板26上沿圆周方向隔开间隔地安装。如图1以及图3所示,旋转圆板26的旋转中心轴R相对于气缸12的中心轴O1沿气缸12的径向偏移距离C,且相对于中心轴O1大致成直角。图1示出了旋转中心轴R的部分的截面、中心轴O1的部分的截面。
为了对旋转圆板26进行旋转驱动,在马达壳部11b内装设电动马达33,电动马达33具有:固定于马达壳部11b的定子33a、在定子33a内自由旋转地设置的转子33b。在设于转子33b的马达轴34上安装冷却风扇35,利用冷却风扇35在外壳11内生成用于冷却电动马达33的冷却风。在外壳11上设有将外部空气导入的未图示的吸气孔、以及将使马达冷却后的空气排出的未图示的排出孔。
行星齿轮式的减速器36装设在马达壳部11b内,减速器36的输入轴37a与马达轴34连结,减速器36的输出轴37b与驱动轴27连结。马达轴34的基端部被安装于马达壳部11b的轴承38a支承为自由旋转,连结马达轴34的前端部的输入轴37a被安装于减速器支架39的轴承38b支承为自由旋转。
在外壳11的后端部装卸自如地安装用于向电动马达33供给电能的电池40。电池40具有容纳壳体40a和在其内部容纳的未图示的多个电池单元。电池单元是由锂离子电池、镍氢电池、锂离子聚合物电池、镍镉电池等构成的二次电池。
蓄压容器41在气缸12上设置于气缸12的轴向外方。蓄压容器41安装于气缸12的顶部且具有向气缸12的径向外方延伸的底壁部42。顶壁部43的成为一体的圆筒部44安装于底壁部42,顶壁部43与气缸12的顶部和底壁部42相对。在蓄压容器41内部形成与活塞室14连通的压缩室45。底壁部42如图5所示那样,由外周面呈圆形的部件形成,底壁部42的中心O2朝向手柄部11c从气缸12的中心轴O1以偏心量E偏心,底壁部42相对于气缸12沿径向偏移。因此,蓄压容器41的压缩室45相对于气缸12的中心轴O1偏心。
蓄压容器41的圆筒部44的直径比气缸12大,因此与在气缸12的顶部侧形成压缩室45的情况相比,能够使包含气缸12和蓄压容器41的上下方向的长度缩短。由此,能够使打入机10小型化。
在底壁部42内面设置供圆筒部44嵌合的环状的突起部46,在突起部46与圆筒部44之间利用密封部件47a进行密封。在底壁部42的外表面设置供气缸12嵌合的环状的突起部48,在突起部48与气缸12之间利用密封部件47b进行密封。蓄压容器41被安装于气缸壳部11a的外罩51覆盖,在外罩51与蓄压容器41之间装入片状的防振橡胶52。此外,在突起部21与气缸12之间装入环状的防振橡胶53。
作为气体在活塞室14和压缩室45的内部填充空气。如图1所示,为了将处于气缸12的前端部的活塞13向顶部驱动,利用电动马达33经由减速器36对旋转圆板26向图3的逆时针方向进行旋转驱动。若使旋转圆板26旋转,则旋转方向下游侧的销32将依次与在图3中的下侧示出的齿条爪31a啮合,从而若在旋转方向上处于最下游侧的销32成为与最下侧的齿条爪31a啮合的状态,则会如图4所示,活塞13大致被驱动到气缸12顶部的开口部。在该状态下,活塞室14内的压缩空气进入压缩室45内,压缩室45内的压缩空气的压力大致为最大。接下来,对旋转圆板26进行旋转驱动,当销32与齿条爪31a的啮合解除,则活塞13被压缩室45中的压缩空气的压力从气缸12的顶部向前端部驱动。旋转圆板26的旋转角度利用未图示的角度检测传感器进行检测。
推杆(接触臂)54沿轴向自由往复移动地设置于鼻部16。利用压缩盘簧55向推杆54施加其前端部突出的方向的弹簧力。当推杆54抵接被打入部件而推杆54克服弹簧力后退时,则使未图示的压接检测传感器动作。在手柄部11c设有扳机56,当扳机56被操作时,则使扳机开关57动作。
在外壳11内设置控制器58,来自上述的角度检测传感器、压接检测传感器、以及扳机开关57的检测信号被送至控制器58。如图1以及图3所示,基于活塞13到达气缸12前端部的前进极限位置来操作扳机56,并且若推杆54抵接被打入部件而使扳机开关57接通,则使电动马达33驱动。由此,使旋转圆板26进行旋转驱动,活塞13被驱动到气缸12顶部的位置。若销32与齿条爪31a的啮合解除,则活塞13被压缩室45内的压缩空气驱动到前进极限位置,由打击头15将固定件打入被打入部件。
如图3以及图4所示,在打击头15的基端部设有与缓冲器25抵接的凸缘61,连结部62从凸缘61向上方突出。连结部62进入形成于活塞13的凹部63内。在连结部62设有沿着中心轴O1的方向延伸的长孔64。贯通该长孔64的活塞销65装设于活塞13,长孔64比活塞销65的直径大。在活塞13装设作为防脱部件的挡圈66,挡圈66与活塞销65的两端部抵接。在活塞13的外周部装设密封部件67,将活塞13与气缸孔12a之间密封。
这样,由于打击头15利用贯通长孔64的活塞销65安装于活塞13,因此打击头15相对于活塞13在活塞13的径向上自由摆动。在利用旋转圆板26经由打击头15将活塞13向气缸12的顶部驱动时,即使打击头15发生摆动,也能够防止径向的外力作用于活塞13。由此,能够顺畅地利用旋转圆板26来驱动活塞13。
为了向压缩室45内填充压缩空气,如图1所示,在蓄压容器41的底壁部42设有填充阀71。填充阀71在其基端部利用螺母72固定于底壁部42,前端部向底壁部42的下方即气缸12侧突出。在填充阀71的前端部设置接头部73,在向压缩室45填充压缩空气时,压缩机、打气筒、储气瓶等各种压缩气体供给单元的供给口与接头部73连接。填充阀71在内部装入有止回阀,若压缩空气供给单元的供给口与接头部73连接,则止回阀开放,压缩空气等压缩气体被填充到压缩室45内。若将供给口从接头部73取下,则由止回阀将填充阀71关闭。
为了将供给口与填充阀71的接头部73连接,在外壳11设有未图示的开口部。在对打入机10进行组装时,使用填充阀71并通过压缩空气供给单元向压缩室45供给压缩空气。此外,在压缩室45内的气压降低时,利用压力供给单元来向压缩室45供给压缩空气。另一方面,在从外壳11内取出气缸12时,利用操作夹具对填充阀71内装入的止回阀进行操作,从而将压缩室45内的气体排出到外部。另外,同样地也可以操作泄压阀81使压缩室45内的气体排出到外部。
为了在压缩室45内的压力超过设定值的情况下,将压缩室45内的压缩空气向外部排出,在底壁部42设有泄压阀81。该设定值被设定于为了对被打入机10打入的最大长度的固定件进行打入所需的压缩室45的压力。
如图1以及图2所示,填充阀71和泄压阀81设于向气缸12的径向外方突出的底壁部4,因此利用形成于底壁部42的下方即气缸12侧的空间,在该空间配置填充阀71和泄压阀81。由此,能够防止气缸壳部11a的直径大型化。特别是,如图1以及图2所示,若将填充阀71和泄压阀81配置于手柄部11c和气缸12之间的空间,则蓄压容器41相对于气缸12的中心轴O1偏向手柄部11c侧配置,从而能够有效地利用压缩室45下方的空间来配置填充阀71和泄压阀81。
如上述这样将填充阀71配置在手柄部11c与气缸12之间的空间,从而能够利用填充阀71容易地向压缩室45填充压缩空气。此外,泄压阀81与填充阀71配置于相同空间,因此在从泄压阀81向外壳11的气缸壳部11b的内部放出含油、水的空气(气体)时,能够防止空气直接吹袭电气零部件、电子零部件。
图6是示出变形例的打入机10的局部切除的主视图,在图6中,填充阀71和泄压阀81位于气缸12的正面侧而安装于底壁部42。即,在图1所示的情况下,填充阀71和泄压阀81配置在气缸12与气缸壳部11a之间的气缸12的背面侧,而在图6所示的打入机10中,则是隔着气缸12而在图1所示情况的相反侧配置填充阀71和泄压阀81。这样,在使填充阀71和泄压阀81位于气缸12的正面侧而安装于蓄压容器41的底壁部42的情况下,也能够利用直径大于气缸12的蓄压容器41的底壁部42使填充阀71和泄压阀81向其下方突出。
图7是从匣盒侧观察另一变形例的打入机10的局部切除的后视图。就该打入机10而言,与图1所示打入机同样地,填充阀71和泄压阀81设置于气缸12和气缸壳部11b之间的空间。上述的填充阀71在底壁部42大致成直角地安装,而图7所示的填充阀71则向外壳11的内表面倾斜,设置于填充阀71的前端部的接头部73接近外壳11的内表面。这样,若使填充阀71为倾斜结构,则能够容易将压缩气体供给单元的供给口与接头部73连接。为了将供给口与填充阀71的接头部73连接,在外壳11设有开口部74。
图8是从匣盒侧观察又一变形例即打入机10的局部切除的后视图。图8所示的填充阀71具有:安装于底壁部42且相对于底壁部42成直角的基部75a、相对于基部75a大致成直角地折弯且向外壳11弯曲的前端部75b。在前端部75b设有接头部73。这样,即使填充阀71采用弯曲结构,也能够容易地将压缩气体供给单元的供给口与接头部73连接。供给口从开口部74与填充阀71的接头部73连接。
图7以及图8示出了将填充阀71和泄压阀81配置在气缸12的背面侧即气缸12与手柄部11c之间的空间的情况,在将其如图6所示那样配置于气缸12前面侧的情况下,也能够使填充阀71为倾斜构造或弯曲构造。
图9是从匣盒侧观察又一变形例的打入机10的局部切除的后视图,图10是图9的C-C线剖视图。就图9所示的打入机10而言,蓄压容器41在图9中向右侧即从正面观察向右侧偏移,并且在相对于气缸12向横向偏移的蓄压容器41的底壁部42装设有填充阀71和泄压阀81。该填充阀71具有:安装于底壁部42而相对于底壁部42成直角的基部75a、以及经由转动联轴器76与基部75a自由转动地连结的转动部75c。转动部75c向相对于基部75a大致成直角的方向弯曲,若使设于转动部75c的接头部73转动,则会如图10中的虚线所示那样,转动部75c从开口部74突出。这样,若填充阀71为转动式,则能够容易地将压缩气体供给单元的供给口与接头部73连接。
在如图9所示在右侧即马达壳部11b侧配置填充阀71和泄压阀81的情况下,能够防止充阀71和泄压阀81从马达壳部11b横向突出。也可以将填充阀71和泄压阀81配置在图9所示情况的相反侧即匣盒18侧,此时能够防止填充阀71和泄压阀81从匣盒18横向突出。这样,在将填充阀71和泄压阀81配置在蓄压容器41左右任一侧的情况下,能够使手柄部11c接近气缸12并提高打入机10的操作性。另外,也可以将如图9所示结构的填充阀71和泄压阀81配置于图1所示的位置。
图11是表示设于外壳的盖部件的打入机的侧视图。在外壳11的气缸壳部11a的与填充阀71相对的部位设有开口部74,在该开口部74自由装卸地设有盖部件77。盖部件77利用螺纹部件78固定于外壳11,若使螺纹部件78松弛而将盖部件77取下,则填充阀71和泄压阀81会露出于外部。在露出的状态下,使压缩气体供给单元的供给口与填充阀71的接头部73连接。
图12是表示设有变形例的盖部件的打入机的局部的侧视图。图12所示的盖部件77利用铰链部79自由开闭地设于外壳11。这样,盖部件77的开闭方式既可以如图11所示为装卸式也可以为开闭式。在图11以及图12中,示出了填充阀71和泄压阀81如图1所示那样配置于气缸12和手柄部11c之间的气缸12背面侧的空间的情况,但是对于如图6~图8所示那样在气缸12正面侧的空间配置的情况,或者如图9所示在气缸12侧面侧的空间配置的情况,也能同样地设置盖部件77。
图13是表示另一实施方式的打入机10的主要部分的侧面侧的剖视图。图14是表示图13所示的蓄压容器的放大剖视图,图15是图13中的D-D线剖视图,图16是图13中的E-E线剖视图。在图13中省略了图示的部分与图1所示的打入机10相同。
在图13所示的打入机10中,如图14所示,蓄压容器41具有第一蓄压容器41a和第二蓄压容器41b。第一蓄压容器41a设于气缸12的轴向外方,具有安装于气缸12顶部的第一底壁部42a。蓄压容器41a在底壁部42a安装有顶壁部43成为一体的圆筒部44a,顶壁部43与气缸12的顶部和底壁部42a相对。在第一蓄压容器41a的内部形成与活塞室14连通的第一压缩室45a。底壁部42a与图1所示的蓄压容器41的底壁部42同样地,外周面由圆形的部件形成,底壁部42a相对于气缸12朝向手柄部11c在径向上偏移。因此,第一蓄压容器41a的压缩室45a相对于气缸12的中心轴O1偏心。
第二蓄压容器41b以形成于第一底壁部42a的开口部49为基端部沿着气缸12向底壁部42a的下方突出,蓄压容器41b内的第二压缩室45b沿着气缸12延伸设置。第二蓄压容器41b具有:与开口部49对置而向气缸12的外方延伸的第二底壁部42b、以及与该第二底壁部42b成为一体的第二圆筒部44b,第二压缩室45b经由第一压缩室45a与活塞室14连通。如图14以及图15所示,第二压缩室45b以部分地包围气缸12的方式使横截面呈圆弧形状。
这样,相对于第一蓄压容器41a使其径向错开地将第二蓄压容器41b反向配置,从而能够利用两方的压缩室45a、45b使蓄压的压缩空气的容量比图1所示的情况增加。
如图13所示,填充阀71在第二底壁部42b向下方突出地设置。在此情况下,也能够利用气缸12与手柄部11c之间的空间,将填充阀71配置在相对于气缸12在径向上错开的位置。
图17(A)是表示图13所示的蓄压容器的另一变形例的俯视图,图17(B)是图17(A)的F-F线剖视图。
该蓄压容器41与图13所示的情况同样地具有第一蓄压容器41a和第二蓄压容器41b。填充阀71与图13所示情况的区别是设于第一底壁部42a。填充阀71在打入机10的侧面侧、即在图17(A)中向下侧偏移地设置于底壁部42a。若这样配置填充阀71,则能够有效地使用蓄压容器41b与外壳11的之间的空隙,使打入机10小型化。但是,也可以使填充阀71向图17(A)的上侧偏移地设置,也可以向打入机10的前面侧偏移地将填充阀71设置于底壁部42a。
图18(A)是表示图13所示的蓄压容器的又一变形例的俯视图,图18(B)是图18(A)的G-G线剖视图。在该打入机10中,填充阀71配置于第二蓄压容器41b的圆筒部44b即侧壁。若这样在蓄压容器41b的侧壁配置填充阀71,则能够有效地利用蓄压容器41b与外壳11之间的空隙,使打入机10小型化。
此外,在上述实施方式中,对于以电池为动力源的直流马达(DC变频马达)进行了说明,但是不限于此,也可以是使用交流电源的马达(AC变频马达)。另外,也可以取代电池而使用AC-DC变换器,将商用电源(交流电源)变换为直流电源,而向打入机内的直流马达(DC变频马达)供给电能。
本发明不限于上述实施方式,而能够在不脱离其要旨的范围内进行各种变更。
符号说明
10—打入机;11—外壳;11a—气缸壳部;11b—马达壳部;11c—手柄部;12—气缸;13—活塞;14—活塞室;15—打击头;16—鼻部;17—射出口;18—匣盒;23—支架;24、24a—贯通孔;25—缓冲器;26—旋转圆板;27—驱动轴;31—齿条;31a—齿条爪;32—销;33—电动马达;34—马达轴;35—冷却风扇;36—减速器;39—减速器支架;40—电池;41—蓄压容器;41a—第一蓄压容器;41b—第二蓄压容器;42—底壁部;42a—第一底壁部;42b—第二底壁部;43—顶壁部;44—圆筒部;44a—第一圆筒部;44b—第二圆筒部;45—压缩室;45a—第一压缩室;45b—第二压缩室;48—突起部;49—开口部;51—外罩;54—推杆;55—压缩盘簧;56—扳机;57—扳机开关;58—控制器;61—凸缘;62—连结部;63—凹部;64—长孔;65—活塞销;66—挡圈;67—密封部件;71—填充阀;72—螺母;73—接头部;74—开口部;75a—基部;75b—前端部;75c—转动部;76—转动联轴器;77—盖部件;78—螺纹部件;79—铰链部;81—泄压阀。
- 基于打螺丝机的螺丝打入机构的螺丝打入机构
- 锚栓打入棒及使用该锚栓打入棒的锚栓打入工法