一种舰船用非增量型无模型自适应艏向控制方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于舰船的自动运动控制技术领域。
背景技术
良好的艏向控制是舰船完成各种任务的必备条件之一,但由于舰船的运动通常具有欠驱动性、大时滞性等特点,并且在航行中易受到风浪流等干扰,以及执行任务时自身水动力特性的巨大变化,使得常规的以数学模型为导向的运动控制策略并不适用。
无模型自适应控制(Model-Free Adaptive Control,MFAC)是一种不依赖于被控对象的数学模型,仅依靠系统的动态输入输出(I/O)数据进行控制的方法。但是,由于舰船艏向控制属于非自衡系统,含有能使系统稳定性降低的积分环节,具体表现为在阶跃输入作用下,受控对象的输出无法达到稳定状态,而是无限的增大或减小。
发明内容
本发明是为了解决将MFAC直接应用于非自衡系统时,会降低系统稳定性的问题,现提供一种舰船用非增量型无模型自适应艏向控制方法。
一种舰船用非增量型无模型自适应艏向控制方法,包括以下步骤:
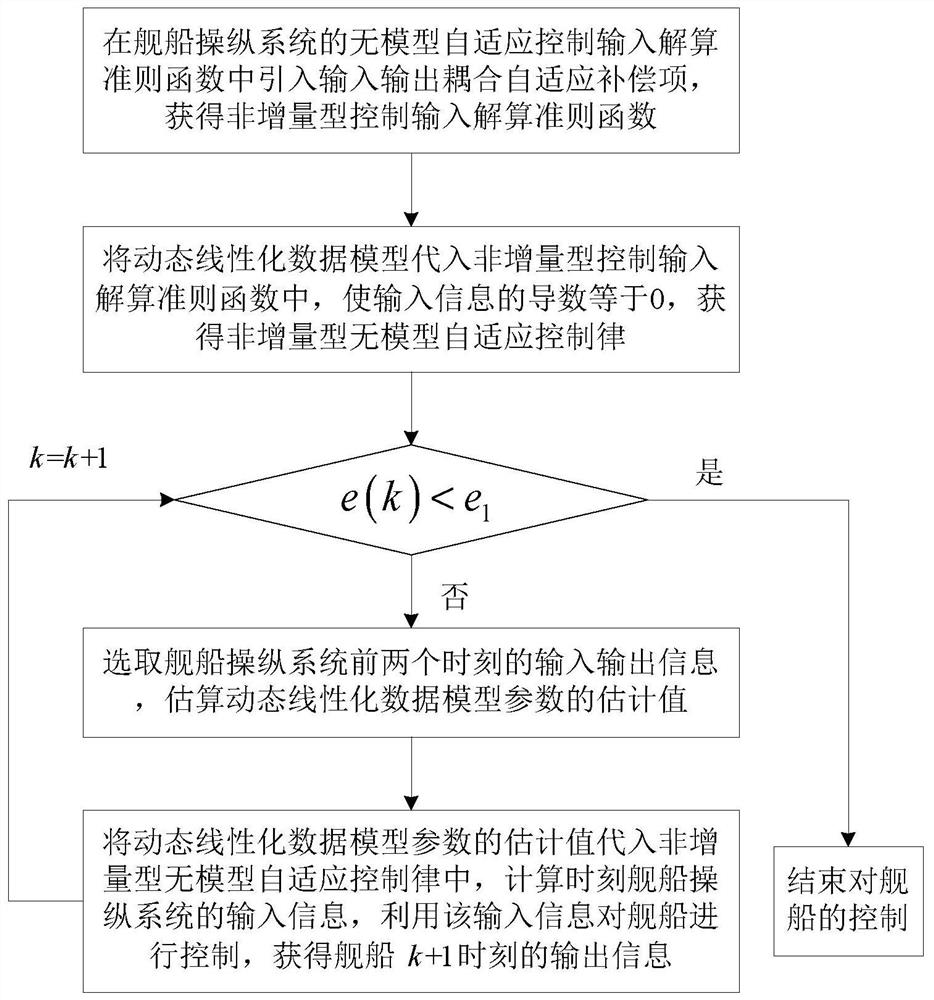
步骤一:在舰船操纵系统的无模型自适应控制输入解算准则函数中引入输入输出耦合自适应补偿项,获得非增量型控制输入解算准则函数;
步骤二:将动态线性化数据模型代入非增量型控制输入解算准则函数中,使输入信息u(k)的导数等于0,获得非增量型无模型自适应控制律;
步骤三:根据舰船操纵系统的历史输入输出信息,估算k时刻动态线性化数据模型参数Φ(k)的估计值
步骤四:根据步骤三获得的估计值
进一步的,在上述步骤二之后还包括判断步骤,所述判断步骤为:
将舰船在k时刻的期望艏向角y*(k)与艏向角y(k)作差,获得k时刻的艏向偏差e(k),
判断e(k)是否小于预设偏差阈值,是则结束对舰船的控制,否则执行步骤三。
进一步的,在上述步骤四之后,使k=k+1,然后返回判断步骤。
进一步的,上述步骤一中,非增量型控制输入解算准则函数记为J[·],该函数的输入为u(k),k
J[u(k)]=[y
其中,u(k)和y(k)分别为k时刻的舵角和艏向角、且分别作为舰船操纵系统的输入信息和输出信息,Δy(k+1)=y(k+1)-y(k),y*(k+1)为k+1时刻的期望艏向角,λ为u(k)的步长因子,k
进一步的,上述步骤二中,动态线性化数据模型的表达式如下:
y(k+1)=y(k)+Φ
其中,Φ
进一步的,上述步骤二中,非增量型无模型自适应控制律的表达式如下:
其中,
进一步的,上述步骤三中,舰船操纵系统的历史输入输出信息包括:k-1时刻的输入信息u(k-1)、k-1时刻的输出信息y(k-1)、k-2时刻的输入信息u(k-2)、k-2时刻的输出信息y(k-2)和k-1时刻动态线性化数据模型参数的估计值
进一步的,上述步骤三中,根据下式估算k时刻动态线性化数据模型参数Φ(k)的估计值
其中,η∈(0,1]为惩罚因子,μ为限制模型参数变化的权重系数,
ΔH(k-1)=[Δy(k-1),Δu(k-1)]
Δu(k-1)=u(k-1)-u(k-2),
Δy(k-1)=y(k-1)-y(k-2)。
进一步的,将上述步骤三获得的估计值
本发明提供了一种舰船用非增量型无模型自适应艏向控制方法,通过在原MFAC准则函数的基础上引入一个输入输出耦合自适应补偿项,进而重新设计了控制律,抵消被控系统的积分影响,使得改进算法得以应用于舰船艏向控制等非自衡系统。同时在控制律中引入的关于u(k-1)的系数项,自适应的调整其在控制律中的权重比,从而增大系统抵抗外界大扰动干扰与模型突变的能力。并且,自适应补偿项的权重系数k
附图说明
图1为具体实施方式一所述一种舰船用非增量型无模型自适应艏向控制方法的流程图;
图2为具体实施方式一所述一种舰船用非增量型无模型自适应艏向控制方法的原理图。
具体实施方式
公告日为2020年10月4日,申请专利号为CN112034858A,名称为《一种融合弱观测高阶输出数据的无模型自适应艏向控制方法》的专利文献提供了一种改进MFAC方法,通过改进控制输入准则函数,在控制律中引入了一阶差分项
公告日为2019年5月17日,申请专利号为201910163383.7,名称为《一种舰船用PID无模型自适应航向控制算法》的专利文献将自适应比例项
公告日为2020年12月4日,申请专利号为202010863628.X,名称为《无模型自适应控制的改进方法》的专利文献针对原控制律存在响应慢及出现振荡现象的问题,引入了比例控制项βK[y
上述三项针对MFAC改进的专利文献均是从控制输出y(·)的角度,通过引入与控制输出y(·)相关的比例项、自适应比例项或自适应微分项的方式,弥补MFAC这类变积分式控制结构的不足,解决其直接应用于舰船艏向控制这类非自衡系统时的振荡问题。
而本实施方式则是从控制输入u(·)的角度,引入自适应补偿项,自适应的调整上一时刻系统输入u(k-1)在控制律中的权重,从而实现对非自衡系统的稳定控制。具体如下:
具体实施方式一:参照图1和图2具体说明本实施方式,本实施方式所述的一种舰船用非增量型无模型自适应艏向控制方法,包括以下步骤:
步骤一:在舰船操纵系统的无模型自适应控制输入解算准则函数中引入输入输出耦合自适应补偿项,获得非增量型控制输入解算准则函数。
具体的,非增量型控制输入解算准则函数记为J[·],该函数的输入为u(k),k
J[u(k)]=[y
其中,u(k)和y(k)分别为k时刻的舵角和艏向角、且分别作为舰船操纵系统的输入信息和输出信息,Δy(k+1)=y(k+1)-y(k),y
步骤二:动态线性化数据模型的表达式如下:
y(k+1)=y(k)+Φ
其中,Φ
将上述动态线性化数据模型代入非增量型控制输入解算准则函数中,使输入信息u(k)的导数等于0,则有非增量型无模型自适应控制律:
其中,
步骤三:将舰船在k时刻的期望艏向角y
步骤四:选取舰船操纵系统前两个时刻的输入输出信息,即:k-1时刻的输入信息u(k-1)、k-1时刻的输出信息y(k-1)、k-2时刻的输入信息u(k-2)、k-2时刻的输出信息y(k-2)、以及k-1时刻动态线性化数据模型参数的估计值
根据下式估算k时刻动态线性化数据模型参数Φ(k)的估计值
其中,η∈(0,1]为惩罚因子,μ为限制模型参数变化的权重系数,
ΔH(k-1)=[Δy(k-1),Δu(k-1)],
Δu(k-1)=u(k-1)-u(k-2),
Δy(k-1)=y(k-1)-y(k-2)。
当
步骤五:将步骤四获得的估计值
本实施方式通过在无模型自适应控制输入解算准则函数中引入输入输出耦合自适应补偿项,解决了MFAC方法无法直接应用于舰船艏向控制这类非自衡系统的问题,避免了输出振荡。同时,本实施方式在控制律中引入的关于u(k-1)的系数项,自适应的调整其在控制律中的权重比,从而提高了系统抵抗外界大扰动的能力。权重系数k
- 一种舰船用非增量型无模型自适应艏向控制方法
- 舰船用多回路无模型自适应艏向控制方法