一种基于测速信息的目标跟踪装置
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及目标跟踪技术领域,尤其涉及一种基于测速信息的目标跟踪装置。
背景技术
目标跟踪问题源于雷达站的出现,1937年二战前夕第一部跟踪雷达站SCR-28在英国的出现标志着目标跟踪问题的正式出现,之后相继发展了各种跟踪技术手段,包括雷达、激光、红外、声纳等目标跟踪系统,这些技术手段在日后的发展中又不断得到完善。早前,人们并不熟知目标跟踪技术,直到70年代,在目标跟踪领域成功应用了卡尔曼滤波理论之后,人们才普遍关注了机动目标跟踪技术,并产生极大兴趣。之后,机动目标跟踪技术发展迅速,现已成为国内外研究最热门的领域之一。近几十年来,为适应科技和应用的需要,相继出现和发展了扩展卡尔曼滤波、多模型算法和粒子滤波等新技术。
传统的目标跟踪装置,在使用时,基本上是在进行测速时将装置充分固定在待测试物体上,当在使用时,由于待测试物体的移动速度是不确定的,很可能会出现移速过快出现固定不牢的情况而导致的装置掉落的问题,对装置造成损坏,为此我们提出一种基于测速信息的目标跟踪装置来解决上述问题。
发明内容
本发明的目的是为了解决现有技术中在待测物体进行测速时很可能会出现移速过快出现固定不牢的情况而导致的装置掉落的问题,而提出的一种基于测速信息的目标跟踪装置。
为了实现上述目的,本发明采用了如下技术方案:
一种基于测速信息的目标跟踪装置,包括壳体、测速装置、智能测速系统、以及所述壳体内设置的拆卸装置和固定装置;
所述拆卸装置包括推杆、磁性块、复位弹簧和滑槽;所述推杆的底部与磁性块的顶部固定连接,所述推杆的外侧壁与所述复位弹簧的内侧壁活动连接;所述磁性块的顶部与所述复位弹簧的底部固定连接,所述磁性块的外侧壁与所述滑槽的内侧壁滑动连接;所述复位弹簧的顶部与所述滑槽的内侧壁顶部固定连接;
所述固定装置包括拉杆、密封板、通孔、限位板、限位块、皮搋和驱动组件;所述拉杆的底部与所述密封板的顶部固定连接,所述密封板的外侧壁与所述通孔的内侧壁活动连接,所述密封板的外侧壁与所述限位板的内侧壁活动连接;所述通孔的内侧壁与所述限位板的外侧壁固定连接,所述通孔的内侧壁与所述限位块的外侧壁固定连接;所述皮搋的顶部设置在所述通孔的底部。
优选地,所述智能测速系统包括位移传感器模块、数据发送模块、时间记录模块、数据接收模块、中央处理器模块、信息录入模块、数据处理模块、数据存储模块和视频信息模块;
所述位移传感器模块的输出端与所述数据发送模块的输入端电性连接,所述时间记录模块的输出端与数据发送模块的输入端电性连接,所述数据发送模块的输出端与数据接收模块的输入端电性连接,所述数据接收模块的输出端与中央处理器模块的输入端电性连接,所述信息录入模块的输出端与中央处理器模块的输入端电性连接,所述中央处理器模块的输出端与数据处理模块的输入端电性连接,所述中央处理器模块的输出端与数据存储模块的输入端电性连接,所述数据处理模块的输入端与数据存储模块的输入端电性连接,所述数据处理模块的输出端与视频显示模块的输入端电性连接。
优选地,所述驱动组件包括转杆、叶轮、第一锥齿轮、第二锥齿轮、转轴和齿轮;所述转杆的外侧壁与所述叶轮的内侧壁固定连接;所述转杆的底部与所述第一锥齿轮的顶部固定连接;所述第一锥齿轮的外侧壁与所述第二锥齿轮的外侧壁相啮合;所述第二锥齿轮的内侧壁与所述转轴的外侧壁固定连接;所述转轴的外侧壁与所述齿轮的内侧壁固定连接。
优选地,所述壳体的顶部固定连接有把手,所述壳体的内侧壁固定连接有固定板,所述壳体的侧壁开设有贯穿孔。
优选地,所述固定板的顶部与所述测速装置的底部固定连接,所述贯穿孔的内侧壁与所述转杆的外侧壁活动连接,所述贯穿孔贯穿所述壳体的侧壁。
优选地,所述齿轮的外侧壁与所述推杆的外侧壁相啮合,所述齿轮的外侧壁与所述拉杆的外侧壁相啮合。
优选地,所述密封板贯穿所述限位板的内侧壁并延伸至所述齿轮的顶部,所述皮搋的顶部与所述壳体的底部固定连接,所述滑槽开设在所述壳体的底部,所述通孔贯穿所述壳体的底部,所述滑槽的内侧壁设置有磁性板,所述磁性板与所述磁性块的磁性相同。
优选地,所述位移传感器模块、数据发送模块和时间记录模块均位于测速装置的内部。
相比现有技术,本发明的有益效果为:
1、当需要进行测速时,首先将该装置放置在待测物体的顶部,通过该装置底部设置的磁性块与物体的顶部相互吸合,进行初步固定,在进行测速时,通过物体的移动带动叶轮的转动,进而带动与叶轮内侧壁固定连接的转杆转动,通过转杆的转动带动第一锥齿轮的转动,进而带动第二锥齿轮转动,通过第二锥齿轮的转动使得转轴带动齿轮转动,通过齿轮的转动使得拉杆沿限位板的内侧壁向上滑动,进而使得密封板向上滑动,使得通孔内以及皮搋内部形成负压,使得皮搋与物体的顶部充分吸合,保证了在对物体进行测速时的稳定性,防止测速时由于速度过快导致该装置掉落,造成损坏,确保了测速得到的数据的准确性,使得试验数据更具有参考价值。
2、在进行测速时,通过叶轮的转动实现对外界空气流速的缓冲,使得外界空气经过贯穿孔进入壳体内部,对壳体内部设置的测速装置进行有效的散热,防止外界空气流速过快直接吹到测速装置的外表面,对测速装置造成损坏,对测速装置进行散热的同时一定程度保护了测速装置,延长了测速装置的使用寿命。
附图说明
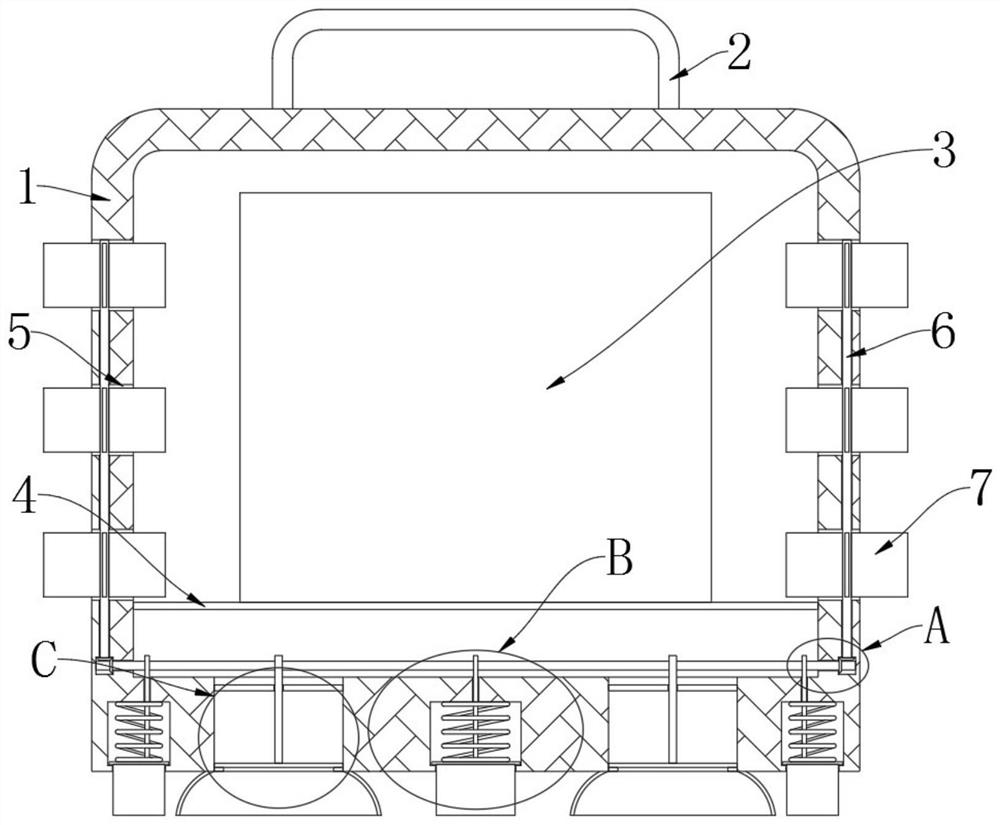
图1为本发明提出的一种基于测速信息的目标跟踪装置的正面剖视结构示意图;
图2为本发明提出的一种基于测速信息的目标跟踪装置的图1中A处放大结构示意图;
图3为本发明提出的一种基于测速信息的目标跟踪装置的图1中B处放大结构示意图;
图4为本发明提出的一种基于测速信息的目标跟踪装置的图1中C处放大结构示意图;
图5为本发明提出的一种基于测速信息的目标跟踪装置的齿轮与推杆侧面结构示意图;
图6为本发明提出的一种基于测速信息的目标跟踪装置的智能测速系统框图。
图中:1壳体、2把手、3测速装置、4固定板、5贯穿孔、6转杆、7叶轮、8第一锥齿轮、9第二锥齿轮、10转轴、11齿轮、12推杆、13磁性块、14复位弹簧、15滑槽、16拉杆、17密封板、18通孔、19限位板、20限位块、21皮搋。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-6,一种基于测速信息的目标跟踪装置,包括壳体1、测速装置3、智能测速系统、以及壳体1内设置的拆卸装置和固定装置;
拆卸装置包括推杆12、磁性块13、复位弹簧14和滑槽15;推杆12的底部与磁性块13的顶部固定连接,推杆12的外侧壁与复位弹簧14的内侧壁活动连接;磁性块13的顶部与复位弹簧14的底部固定连接,磁性块13的外侧壁与滑槽15的内侧壁滑动连接;复位弹簧14的顶部与滑槽15的内侧壁顶部固定连接;
固定装置包括拉杆16、密封板17、通孔18、限位板19、限位块20、皮搋21和驱动组件;拉杆16的底部与密封板17的顶部固定连接,密封板17的外侧壁与通孔18的内侧壁活动连接,密封板17的外侧壁与限位板19的内侧壁活动连接;通孔18的内侧壁与限位板19的外侧壁固定连接,通孔18的内侧壁与限位块20的外侧壁固定连接;皮搋21的顶部设置在通孔18的底部。
其中,智能测速系统包括位移传感器模块、数据发送模块、时间记录模块、数据接收模块、中央处理器模块、信息录入模块、数据处理模块、数据存储模块和视频信息模块;
位移传感器模块的输出端与数据发送模块的输入端电性连接,时间记录模块的输出端与数据发送模块的输入端电性连接,数据发送模块的输出端与数据接收模块的输入端电性连接,数据接收模块的输出端与中央处理器模块的输入端电性连接,信息录入模块的输出端与中央处理器模块的输入端电性连接,中央处理器模块的输出端与数据处理模块的输入端电性连接,中央处理器模块的输出端与数据存储模块的输入端电性连接,数据处理模块的输入端与数据存储模块的输入端电性连接,数据处理模块的输出端与视频显示模块的输入端电性连接。
其中,驱动组件包括转杆6、叶轮7、第一锥齿轮8、第二锥齿轮9、转轴10和齿轮11;转杆6的外侧壁与叶轮7的内侧壁固定连接;转杆6的底部与第一锥齿轮8的顶部固定连接;第一锥齿轮8的外侧壁与第二锥齿轮9的外侧壁相啮合;第二锥齿轮9的内侧壁与转轴10的外侧壁固定连接;转轴10的外侧壁与齿轮11的内侧壁固定连接。
其中,壳体1的顶部固定连接有把手2,壳体1的内侧壁固定连接有固定板4,壳体1的侧壁开设有贯穿孔5。
其中,固定板4的顶部与测速装置3的底部固定连接,贯穿孔5的内侧壁与转杆6的外侧壁活动连接,贯穿孔5贯穿壳体1的侧壁。
其中,齿轮11的外侧壁与推杆12的外侧壁相啮合,齿轮11的外侧壁与拉杆16的外侧壁相啮合。
其中,密封板17贯穿限位板19的内侧壁并延伸至齿轮11的顶部,皮搋21的顶部与壳体1的底部固定连接,滑槽15开设在壳体1的底部,通孔18贯穿壳体1的底部,滑槽15的内侧壁设置有磁性板,磁性板与磁性块13的磁性相同。
其中,位移传感器模块、数据发送模块和时间记录模块均位于测速装置3的内部。
本发明中,当需要进行测速时,首先将该装置放置在待测物体的顶部,通过该装置底部设置的磁性块13与物体的顶部相互吸合,进行初步固定,在进行测速时,通过物体的移动带动叶轮7的转动,进而带动与叶轮7内侧壁固定连接的转杆6转动,通过转杆6的转动带动第一锥齿轮8的转动,进而带动第二锥齿轮9转动,通过第二锥齿轮9的转动使得转轴10带动齿轮11转动,通过齿轮11的转动使得拉杆16沿限位板19的内侧壁向上滑动,进而使得密封板17向上滑动,使得通孔18内以及皮搋21内部形成负压,使得皮搋21与物体的顶部充分吸合,保证了在对物体进行测速时的稳定性,防止测速时由于速度过快导致该装置掉落,造成损坏,确保了测速得到的数据的准确性,使得试验数据更具有参考价值;
在进行测速时,通过叶轮7的转动实现对外界空气流速的缓冲,使得外界空气经过贯穿孔5进入壳体1内部,对壳体1内部设置的测速装置3进行有效的散热,防止外界空气流速过快直接吹到测速装置3的外表面,对测速装置3造成损坏,对测速装置3进行散热的同时一定程度保护了测速装置3,延长了测速装置3的使用寿命;
当测速完成后,通过滑槽15顶部设置的与磁性块13磁性相同的磁性板以及复位弹簧14使得磁性块13沿滑槽15的内侧壁向下滑动,进而使得推杆12带动齿轮11转动,进而带动转轴10转动,通过转轴10的转动带动齿轮11的转动使得拉杆16向下推动密封板17,使得皮搋21内部气压恢复到最初状态,这时便可取下该装置;
在测速前,首先通过信息录入模块将待测物体的数据录入,录入后的数据发送给中央处理器模块,中央处理器模块将接收到的数据发送到数据存储模块进行存储,在测速过程中,通过位移传感器模块和时间记录模块,将物体移动的距离和移动该距离所用时间进行记录,记录完成后的数据通过数据发送模块发送到数据接收模块,数据接收模块将接收到的数据发送给中央处理器模块,中央处理器模块将数据发送给数据处理模块进行处理,处理完成后的数据发送给数据存储模块进行存储,方便人员对不同物体的速度进行有效的对比,处理后的数据还会发送给视频显示模块,对数据进行显示,人员便可根据视频显示模块显示的数据对物体的速度进行了解。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于测速信息的目标跟踪装置
- 一种基于多观测者测速信息的分布式目标跟踪方法