一种蓄电池内阻检测装置及方法
文献发布时间:2023-06-19 11:52:33
技术领域
本申请涉及智能车领域,尤其涉及一种蓄电池内阻检测装置及方法。
背景技术
车载智能终端(telematics box,T-Box)是一种装载在车辆上的智能终端,主要用于实现车辆与车联网服务平台之间通信,比如,对内可与车辆的控制局域网总线(controlarea network bus,CAN-Bus)相连实现指令和信息的传递,对外可通过云平台与其他设备实现互联。T-Box内安装有备用电池,用于在特殊情况下为T-Box供电,比如,当车辆发生碰撞、且输入电源无法正常使用时,可通过备用电池为T-Box供电,以实现T-Box的紧急呼叫或数据上传的功能。备用电池通常是采用镍氢电池或锂电池等蓄电池,而蓄电池的使用寿命小于车辆的使用寿命,为了保证T-Box中备用电池的正常使用,需要定期检测备用电池的寿命。目前,检测蓄电池的内阻是比较常用的一种蓄电池寿命检测的方法。
现有技术提供的一种蓄电池的内阻检测电路中,分别通过两个电容器来保持蓄电池在充电前后的两极之间的电压,但是电容器保持的电压会随着时间的推移而降低,进而基于该电压确定蓄电池内阻时,会导致内阻的测量误差较大。
发明内容
本申请提供一种蓄电池内阻检测装置及方法,解决了现有技术中内阻的测量误差较大的问题。
为达到上述目的,本申请采用如下技术方案:
第一方面,提供一种蓄电池内阻检测装置,包括:处理电路、差分放大器和充电电路,蓄电池分别与处理电路、差分放大器的第一输入端和充电电路连接,处理电路还与差分放大器的输出端和充电电路连接;处理电路,用于向差分放大器的第二输入端输入第一比较电压并保持,第一比较电压的电压数值接近于蓄电池充电前的第一检测电压的电压数值,比如,第一比较电压的电压数值等于第一检测电压的电压数值;差分放大器,用于根据第一检测电压和第一比较电压输出第一输出电压;处理电路,还用于控制充电电路通过恒定电流对蓄电池充电,在蓄电池充电后,检测蓄电池的第二检测电压;差分放大器,还用于根据第二检测电压和第一比较电压输出第二输出电压;处理电路,还用于根据恒定电流、第一输出电压和第二输出电压确定蓄电池的内阻。
上述技术方案中,处理电路向差分放大器输入的第一比较电压的电压数值与蓄电池充电前的第一检测电压的电压数值相等,第一比较电压的电压数值由处理电路设置,从而可以保证第一比较电压的稳定性。差分放大器将第一比较电压作为参考电压分别与蓄电池充电前后的第一检测电压和第二检测电压进行比较放大,从而根据放大后的电压确定蓄电池的内阻,且在确定内阻的过程中可以抵消掉差分放大器的偏差、以及数模转换和模数转换的偏差,从而降低了内阻检测的误差,提高了检测精度,同时对该装置对差分放大器的精度要求较低。
在第一方面的一种可能的实现方式中,处理电路还用于:检测到第一检测电压处于预设电压范围,向差分放大器的第二输入端输入第一比较电压。上述可能的实现方式中,在第一检测电压处于预设电压范围时,蓄电池的第一检测电压的稳定性较好,从而可以提高检测到的第一检测电压的稳定性,以及设置的第一比较电压的电压数值的稳定性。
在第一方面的一种可能的实现方式中,处理电路还用于:第一输出电压处于预设输出电压范围之外,调整第一比较电压以使第一输出电压处于预设输出电压范围之内。上述可能的实现方式中,通过调整第一比较电压以使第一输出电压处于预设输出电压范围之内,可以提高处理电压检测到的第一输出电压的稳定性。
在第一方面的一种可能的实现方式中,处理电路为具有第一模数转换检测接口、第二模数转换检测接口和数模转换输出接口的微处理器,微处理器用于:通过第一模数转换检测接口分别检测第一检测电压和第二检测电压,通过第二模数转换检测接口分别检测第一输出电压和第二输出电压,通过数模转换输出接口输出第一比较电压。上述可能的实现方式中,当该处理电路为上述微处理器时,可以提高该内阻检测装置的集成度。
在第一方面的一种可能的实现方式中,处理电路包括:数模转换电路,具有第一模数转换检测接口、第二模数转换检测接口和模拟信号输出接口的微处理器;微处理器,用于通过第一模数转换检测接口分别检测第一检测电压和第二检测电压,通过第二模数转换检测接口分别检测第一输出电压和第二输出电压,通过模拟信号输出接口输出脉宽调制信号;数模转换电路,用于将脉宽调制信号进行数模转换后输出第一比较电压。上述可能的实现方式中,该微处理器可以为常用的微处理器,从而可以降低微处理器的成本。
在第一方面的一种可能的实现方式中,该数模转换电路包括:N级RC滤波电路,用于对脉宽调制信号进行滤波处理,N为大于或等于1的整数;电压跟随器,用于根据滤波处理后的脉宽调制信号输出第一比较电压。上述可能的实现方式中,提供了一种简单有效的数模转换电路。
在第一方面的一种可能的实现方式中,恒定电流大于0且小于200mA。上述可能的实现方式中,在恒定电流大于0且小于200mA时,可以进一步提高内阻检测的精确度。
在第一方面的一种可能的实现方式中,处理电路和差分放大器集成在一个集成电路芯片中。上述可能的实现方式中,可以提高该内阻检测装置的集成度。
在第一方面的一种可能的实现方式中,处理电路和差分放大器和充电电路集成在一个集成电路芯片中。上述可能的实现方式中,可以提高该内阻检测装置的集成度。
第二方面,提供一种终端,该终端包括:处理器、存储器、通信接口、总线、以及上述第一方面或第一方面的任一种可能的实现方式所提供的蓄电池内阻检测装置,该装置可以包括蓄电池;其中,处理器、存储器、通信接口和蓄电池通过总线连接,蓄电池用于为处理器、存储器和通信接口供电。
在第二方面的一种可能的实现方式中,该终端为车辆。
第三方面,提供一种芯片系统,该芯片系统包括:蓄电池、以及上述第一方面或第一方面的任一种可能的实现方式所提供的蓄电池内阻检测装置;其中,该蓄电池可以与该内阻检测装置集成在一起,也可以不与该内阻检测装置集成在一起。
在第三方面的一种可能的实现方式中,该芯片系统还包括:处理器、存储器、通信接口和总线;其中,处理器、存储器、通信接口和蓄电池通过总线连接,蓄电池用于为处理器、存储器和通信接口供电。
第四方面,提供一种蓄电池内阻检测方法,应用于包括处理电路、差分放大器和充电电路的装置中,蓄电池分别与处理电路、差分放大器的第一输入端和充电电路连接,处理电路还与差分放大器的输出端和充电电路连接;该方法包括:处理电路向差分放大器的第二输入端输入第一比较电压并保持,第一比较电压的电压数值接近于蓄电池充电前的第一检测电压的电压数值;差分放大器根据第一检测电压和第一比较电压输出第一输出电压;处理电路控制充电电路通过恒定电流对蓄电池充电,在蓄电池充电后,检测蓄电池的第二检测电压;差分放大器根据第二检测电压和第一比较电压输出第二输出电压;处理电路根据恒定电流、第一输出电压和第二输出电压确定蓄电池的内阻。
在第四方面的一种可能的实现方式中,处理电路向差分放大器的第二输入端输入第一比较电压,包括:检测到第一检测电压处于预设电压范围,向差分放大器的第二输入端输入第一比较电压。
在第四方面的一种可能的实现方式中,该方法还包括:第一输出电压处于预设输出电压范围之外,处理电路调整第一比较电压以使第一输出电压处于预设输出电压范围之内。
在第四方面的一种可能的实现方式中,处理电路为具有第一模数转换检测接口、第二模数转换检测接口和数模转换输出接口的微处理器,该方法还包括:通过第一模数转换检测接口分别检测第一检测电压和第二检测电压,通过第二模数转换检测接口分别检测第一输出电压和第二输出电压,通过数模转换输出接口输出第一比较电压。
在第四方面的一种可能的实现方式中,处理电路包括:数模转换电路,具有第一模数转换检测接口、第二模数转换检测接口和模拟信号输出接口的微处理器;该方法还包括:微处理器通过第一模数转换检测接口分别检测第一检测电压和第二检测电压,通过第二模数转换检测接口分别检测第一输出电压和第二输出电压,通过模拟信号输出接口输出脉宽调制信号;数模转换电路将脉宽调制信号进行数模转换后输出第一比较电压。
在第四方面的一种可能的实现方式中,数模转换电路将脉宽调制信号进行数模转换后输出第一比较电压,包括:对脉宽调制信号进行滤波处理;根据滤波处理后的脉宽调制信号输出第一比较电压。
在第四方面的一种可能的实现方式中,恒定电流大于0且小于200mA。
可以理解地,上述提供的任一种蓄电池内阻检测方法、终端和芯片系统等包含了上文所提供的蓄电池内阻检测装置,因此,其所能达到的有益效果可参考上文所提供的对应的蓄电池内阻检测装置中的有益效果,此处不再赘述。
附图说明
图1为本申请实施例提供的一种车辆100的系统架构图;
图2为本申请实施例提供的一种T-Box的结构示意图;
图3为现有技术中的一种内阻检测电路的结构示意图;
图4为一种差分放大电路及漏电途径的示意图;
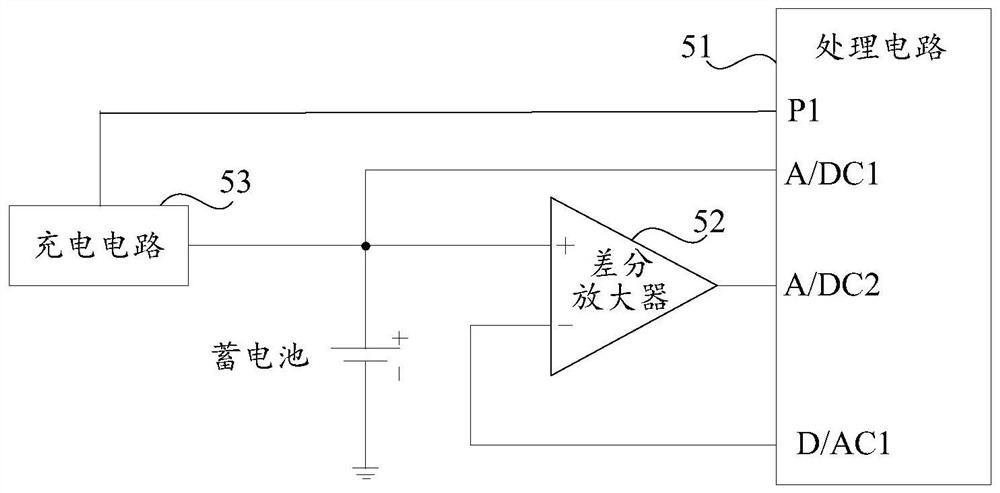
图5为本申请实施例提供的第一种蓄电池的内阻检测装置的结构示意图;
图6为本申请实施例提供的一种蓄电池的内阻检测方法的流程示意图;
图7为本申请实施例提供的另一种蓄电池的内阻检测方法的流程示意图;
图8为本申请实施例提供的一种T-Box中备用电池的显示界面图;
图9为本申请实施例提供的第二种蓄电池的内阻检测装置的结构示意图;
图10为本申请实施例提供的第三种蓄电池的内阻检测装置的结构示意图;
图11为本申请实施例提供的第四种蓄电池的内阻检测装置的结构示意图;
图12为本申请实施例提供的第五种蓄电池的内阻检测装置的结构示意图;
图13为本申请实施例提供的一种终端的结构示意图。
具体实施方式
图1为本申请实施例提供的一种具有自动驾驶功能的车辆100的功能框图。在一个实施例中,将车辆100配置为完全或部分地自动驾驶模式。例如,车辆100可以在处于自动驾驶模式中的同时控制自身,并且可通过人为操作来确定车辆及其周边环境的当前状态,确定周边环境中的至少一个其他车辆的可能行为,并确定其他车辆执行可能行为的可能性相对应的置信水平,基于所确定的信息来控制车辆100。在车辆100处于自动驾驶模式中时,可以将车辆100置为在没有和人交互的情况下操作。
车辆100可包括各种子系统,例如行进系统102、传感器系统104、控制系统106、一个或多个外围设备108以及电源110、计算机系统112和用户接口116。可选地,车辆100可包括更多或更少的子系统,并且每个子系统可包括多个元件。另外,车辆100的每个子系统和元件可以通过有线或者无线互连。
行进系统102可包括为车辆100提供动力运动的组件。在一个实施例中,行进系统102可包括引擎118、能量源119、传动装置120和车轮/轮胎121。引擎118可以是内燃引擎、电动机、空气压缩引擎或其他类型的引擎组合,例如汽油发动机和电动机组成的混动引擎,内燃引擎和空气压缩引擎组成的混动引擎。引擎118将能量源119转换成机械能量。
能量源119的示例包括汽油、柴油、其他基于石油的燃料、丙烷、其他基于压缩气体的燃料、乙醇、太阳能电池板、电池和其他电力来源。能量源119也可以为车辆100的其他系统提供能量。
传动装置120可以将来自引擎118的机械动力传送到车轮121。传动装置120可包括变速箱、差速器和驱动轴。在一个实施例中,传动装置120还可以包括其他器件,比如离合器。其中,驱动轴可包括可耦合到一个或多个车轮121的一个或多个轴。
传感器系统104可包括感测关于车辆100周边的环境的信息的若干个传感器。例如,传感器系统104可包括定位系统122(定位系统可以是全球定位系统(globalpositioning system,GPS)系统,也可以是北斗系统或者其他定位系统)、惯性测量单元(inertial measurement unit,IMU)124、雷达126、激光测距仪128以及相机130。传感器系统104还可包括被监视车辆100的内部系统的传感器(例如,车内空气质量监测器、燃油量表、机油温度表等)。来自这些传感器中的一个或多个的传感器数据可用于检测对象及其相应特性(位置、形状、方向、速度等)。这种检测和识别是自主车辆100的安全操作的关键功能。
定位系统122可用于估计车辆100的地理位置。IMU 124用于基于惯性加速度来感测车辆100的位置和朝向变化。在一个实施例中,IMU 124可以是加速度计和陀螺仪的组合。
雷达126可利用无线电信号来感测车辆100的周边环境内的物体。在一些实施例中,除了感测物体以外,雷达126还可用于感测物体的速度和/或前进方向。
激光测距仪128可利用激光来感测车辆100所位于的环境中的物体。在一些实施例中,激光测距仪128可包括一个或多个激光源、激光扫描器以及一个或多个检测器,以及其他系统组件。
相机130可用于捕捉车辆100的周边环境的多个图像。相机130可以是静态相机或视频相机。
控制系统106为控制车辆100及其组件的操作。控制系统106可包括各种元件,其中包括转向系统132、油门134、制动单元136、传感器融合算法138、计算机视觉系统140、路线控制系统142以及障碍规避系统144,障碍规避系统144也可以称为障碍物避免系统。
转向系统132可操作来调整车辆100的前进方向。例如在一个实施例中可以为方向盘系统。
油门134用于控制引擎118的操作速度并进而控制车辆100的速度。
制动单元136用于控制车辆100减速。制动单元136可使用摩擦力来减慢车轮121。在其他实施例中,制动单元136可将车轮121的动能转换为电流。制动单元136也可采取其他形式来减慢车轮121转速从而控制车辆100的速度。
计算机视觉系统140可以操作来处理和分析由相机130捕捉的图像以便识别车辆100周边环境中的物体和/或特征。所述物体和/或特征可包括交通信号、道路边界和障碍物。计算机视觉系统140可使用物体识别算法、运动中恢复结构(structure from motion,SFM)算法、视频跟踪和其他计算机视觉技术。在一些实施例中,计算机视觉系统140可以用于为环境绘制地图、跟踪物体、估计物体的速度等等。
路线控制系统142用于确定车辆100的行驶路线。在一些实施例中,路线控制系统142可结合来自传感器138、GPS 122和一个或多个预定地图的数据以为车辆100确定行驶路线。
障碍规避系统144用于识别、评估和避免或者以其他方式越过车辆100的环境中的潜在障碍物。
当然,在一个实例中,控制系统106可以增加或替换地包括除了所示出和描述的那些以外的组件。或者也可以减少一部分上述示出的组件。
车辆100通过外围设备108与外部传感器、其他车辆、其他计算机系统或用户之间进行交互。外围设备108可包括无线通信系统146、车载电脑148、麦克风150和/或扬声器152。
在一些实施例中,外围设备108提供车辆100的用户与用户接口116交互的手段。例如,车载电脑148可向车辆100的用户提供信息。用户接口116还可操作车载电脑148来接收用户的输入。车载电脑148可以通过触摸屏进行操作。在其他情况中,外围设备108可提供用于车辆100与位于车内的其它设备通信的手段。例如,麦克风150可从车辆100的用户接收音频(例如,语音命令或其他音频输入)。类似地,扬声器152可向车辆100的用户输出音频。
无线通信系统146可以直接地或者经由通信网络来与一个或多个设备无线通信。在本申请实施例中,无线通信系统146可包括车载智能终端(Telematics BOX,T-Box),T-Box可以安装在车辆100内部人手不容易触及的地方,比如仪表板下面,手套箱下面或者是后背箱下面等。T-Box主要用于负责车辆100与车联网服务平台之间的通信。例如,T-Box可使用3G蜂窝通信,例如码分多址(code division multiple access,CDMA)、全球移动通信系统(global system for mobile communications,GSM)、通用分组无线服务(generalpacket radio service,GPRS)技术,或者4G蜂窝通信,例如长期演进(long termevolution,LTE),或者5G蜂窝通信。无线通信系统146可利用WiFi与无线局域网(wirelesslocal area network,WLAN)通信。在一些实施例中,T-Box还可利用红外链路、蓝牙或ZigBee等其他通信协议与设备直接通信,例如与其他车辆和/或路侧单元等设备通信。
电源110可向车辆100的各种组件提供电力。在一个实施例中,电源110可以为可再充电锂离子或铅酸电池。这种电池的一个或多个电池组可被配置为电源为车辆100的各种组件提供电力。在一些实施例中,电源110和能量源119可一起实现,例如一些全电动车中那样。
车辆100的部分或所有功能受计算机系统112控制。计算机系统112可包括至少一个处理器123,处理器123执行存储在例如存储器124这样的非暂态计算机可读介质中的指令125。计算机系统112还可以是采用分布式方式控制车辆100的个体组件或子系统的多个计算设备。
处理器123可以是任何常规的处理器,诸如商业可获得的中央处理器(centralprocessing unit,CPU)。替选地,该处理器可以是诸如专用集成电路(applicationspecific integrated circuits,ASIC)或其它基于硬件的处理器的专用设备。尽管图1功能性地图示了处理器、存储器、和在相同块中的计算机系统112的其它元件,但是本领域的普通技术人员应该理解该处理器、计算机、或存储器实际上可以包括可以或者可以不存储在相同的物理外壳内的多个处理器、计算机、或存储器。例如,存储器可以是硬盘驱动器或位于不同于计算机系统112的外壳内的其它存储介质。因此,对处理器或计算机的引用将被理解为包括对可以或者可以不并行操作的处理器或计算机或存储器的集合的引用。不同于使用单一的处理器来执行此处所描述的步骤,诸如转向组件和减速组件的一些组件每个都可以具有其自己的处理器,所述处理器只执行与特定于组件的功能相关的计算。
在此处所描述的各个方面中,处理器可以位于远离该车辆并且与该车辆进行无线通信。在其它方面中,此处所描述的过程中的一些在布置于车辆内的处理器上执行而其它则由远程处理器执行,包括采取执行单一操纵的必要步骤。
在一些实施例中,存储器124可包含指令125(例如,程序逻辑),指令125可被处理器123执行来执行车辆100的各种功能,包括以上描述的那些功能。存储器124也可包含额外的指令,包括向行进系统102、传感器系统104、控制系统106和外围设备108中的一个或多个发送数据、从其接收数据、与其交互和/或对其进行控制的指令。
除了指令125以外,存储器124还可存储数据,例如道路地图、路线信息,车辆的位置、方向、速度以及其它这样的车辆数据,以及其他信息。这种信息可在车辆100在自主、半自主和/或手动模式中操作期间被车辆100和计算机系统112使用。
用户接口116,用于向车辆100的用户提供信息或从其接收信息。可选地,用户接口116可包括在外围设备108的集合内的一个或多个输入/输出设备,例如无线通信系统146、车车在电脑148、麦克风150和扬声器152。
计算机系统112可基于从各种子系统(例如,行进系统102、传感器系统104和控制系统106)以及从用户接口116接收的输入来控制车辆100的功能。例如,计算机系统112可利用来自控制系统106的输入以便控制转向单元132来避免由传感器系统104和障碍规避系统144检测到的障碍物。在一些实施例中,计算机系统112可操作来对车辆100及其子系统的许多方面提供控制。
可选地,上述这些组件中的一个或多个可与车辆100分开安装或关联。例如,存储器124可以部分或完全地与车辆100分开存在。上述组件可以按有线和/或无线方式来通信地耦合在一起。
可选地,上述组件只是一个示例,实际应用中,上述各个模块中的组件有可能根据实际需要增添或者删除,图1不应理解为对本申请实施例的限制。
在道路行进的自动驾驶汽车,如上面的车辆100,可以识别其周围环境内的物体以确定对当前速度的调整。所述物体可以是其它车辆、交通控制设备、或者其它类型的物体。在一些示例中,可以独立地考虑每个识别的物体,并且基于物体的各自的特性,诸如它的当前速度、加速度、与车辆的间距等,可以用来确定自动驾驶汽车所要调整的速度。
可选地,自动驾驶汽车车辆100或者与自动驾驶车辆100相关联的计算设备(如图1的计算机系统112、计算机视觉系统140、存储器124)可以基于所识别的物体的特性和周围环境的状态(例如,交通、雨、道路上的冰、等等)来预测所述识别的物体的行为。可选地,每一个所识别的物体都依赖于彼此的行为,因此还可以将所识别的所有物体全部一起考虑来预测单个识别的物体的行为。车辆100能够基于预测的所述识别的物体的行为来调整它的速度。换句话说,自动驾驶汽车能够基于所预测的物体的行为来确定车辆将需要调整到(例如,加速、减速、或者停止)什么稳定状态。在这个过程中,也可以考虑其它因素来确定车辆100的速度,诸如,车辆100在行驶的道路中的横向位置、道路的曲率、静态和动态物体的接近度等等。
除了提供调整自动驾驶汽车的速度的指令之外,计算设备还可以提供修改车辆100的转向角的指令,以使得自动驾驶汽车遵循给定的轨迹和/或维持与自动驾驶汽车附近的物体(例如,道路上的相邻车道中的轿车)的安全横向和纵向距离。
上述车辆100可以为轿车、卡车、摩托车、公共汽车、船、飞机、直升飞机、割草机、娱乐车、游乐场车辆、施工设备、电车、高尔夫球车、火车和手推车等,本申请实施例不做特别的限定。
在介绍完上述车辆100之后,下面对本申请涉及的上述车辆100中的车载智能终端T-Box进行详细介绍说明。
其中,T-Box对内可与车辆100的控制器局域网总线(controller area networkbus,CAN-Bus)相连,实现指令和信息的传递,对外可通过云平台与其他设备实现互联,T-Box是车内外信息交互的纽带。示例性的,T-Box作为无线网关为车辆100提供远程通讯接口,可以提供行车数据采集、行驶轨迹记录、车辆故障监控、车辆远程控制(比如,开闭锁、空调控制、车窗控制、发送机扭矩限制、发动机启停等)、驾驶行为分析、4G无线热点分析等服务。
另外,T-Box与车辆100中的电源110连接,且内部安装有备用电池。电源110用于在正常情况下为T-Box供电,此时备用电池会一直处在待机的状态,备用电池可用于在特殊情况下为T-Box供电,以实现T-Box与其他设备的通信功能。示例性,当电源110电压跌落的时候(比如,点火、或发生碰撞导致电源110损坏或线束脱落时),会切换到备用电池进行供电,以实现T-Box的紧急呼叫或数据上传的功能。
以图2所示的T-Box为例,T-Box中可以包括微控制器(micro controller unit,MCU)、开关电源1、开关电源2、充电单元、备用电池、两个二极管D1和D2。其中,MCU通过开关电源1与第一节点连接;车辆100的电源110通过二极管D1与第一节点连接;备用电池的正极端依次通过二极管D2和开关电源2与第一节点连接,备用电池的负极端与接地端连接;充电单元连接在第一节点与备用电池的正极端之间,MCU还与充电单元连接。具体的,在正常情况下,开关电源1闭合、开关电源2断开、二极管D1导通,电源110的电流经过二极管D1和开关电源1后向MCU供电;当电源110不可用时,开关电源1闭合、开关电源2闭合、二极管D2导通,备用电池的电流经过二极管D2和开关电源1后向MCU供电。此外,在电源110为MCU供电的情况系下,电源110的电流还可以经过二极管D1到达充电单元,MCU可以控制充电单元为备用电池充电。
其中,备用电池平常使用的概率比较小,但由于自漏电及待机静态电流的消耗,需及时对备用电池进行补电。同时,随着使用时间的推移,备用电池会逐渐老化,导致寿命减小,充满电后能使用的容量会逐渐减小。为了保证备用电池能够在特殊情况下为T-Box正常供电,需要对备用电池的寿命或者电量有一定的要求。比如,紧急呼叫(emergency call,E-CALL)法规中对备用电池的寿命要求为:常温下至少维持10分钟通话及1小时待机,按照T-Box的待机功率估算,则大概需要500mAh@3.2V左右的电量。
在T-Box中,比较常用的备用电池主要有可充电的镍氢电池和锂电池等,由于车辆100的生命周期一般为15年,而1000mAh的备用电池按照以上E-CALL法规定义的寿命仅为5~7年。因此,备用电池无法满足车辆100全生命周期的寿命要求,所以需要T-Box定期检测备份电池的寿命,当寿命达到门限时,能及时上报备份电池寿命终止情况,以提醒车主更换新的备用电池。目前,检测蓄电池的内阻是比较常用的一种蓄电池寿命检测的方法。
图3为现有技术提供的一种蓄电池的内阻检测电路,该电路包括:蓄电池B、充电单元、控制器、差分放大电路、切换开关SW、第一电容器C1和第二电容器C2。其中,控制器的第一输出端PO1与切换开关SW连接,用于控制切换开关的切换;充电单元的输入端与控制器的第二输出端PO2连接,充电单元的正极充电端与蓄电池B的Bp端连接,充电单元的负极充电端与接地端连接;切换开关SW的第一端a与差分放大电路的第一输入端In1连接,切换开关SW的第二端b与差分放大电路的第二输入端In2连接,切换开关SW的第三端c与蓄电池B的Bp端连接;第一电容器C1连接在差分放大电路的第一输入端In1与接地端之间,第二电容器C2连接在差分放大电路的第二输入端In2与接地端之间;控制器的第一输入端PI1通过第一(analog/digital converter,A/DC)与蓄电池B的Bp端连接;差分放大电路的输出端Out通过第二A/DC与控制器的第二输入端PI2连接。
具体的,图3所示的检测电路检测蓄电池B的内阻的过程为:S01.控制器将切换开关SW切换至ca,控制充电单元通过充电电流Ic对蓄电池B进行充电,蓄电池对第一电容器C1进行充电直到电压稳定,此时第一电容器C1的电压等效于蓄电池B充电时Bp端的电压(表示为V1),并将此电压输出到差分放大电路的第一输入端In1;S02.控制器关闭充电单元,将切换开关SW切换至cb,蓄电池B对第二电容器C2进行充电,直到电压稳定,此时第二电容器C2的电压等效于蓄电池B空载时Bp端的电压(表示为V2),并将此电压输出至差分放大电路的第二输入端In2;S03.差分放大电路对输入的电压V1和V2进行比较并放大,从输出端Out输出的电压经过第二A/DC进行模数转换后传输至控制器;S04.控制器根据如下公式(1)确定蓄电池的内阻;式中,r表示蓄电池的内阻,Ic表示充电电流,A表示差分放大电路的放大倍数,V1-V2表示差分放大电路输出的电压。
r=(V1-V2)/(A×Ic) (1)
以图3中差分放大电路的结构为经典差分放大电路结构,则第一电容器C1和第二电容器C2与差分放大电路的具体结构可如图4中的(a)所示,对上述内阻检测过程中差分放大电路的漏电途径进行详细分析说明。参见图4中的(a),该差分放大电路包括:运放Am、电阻R1至电阻R4。其中,R1的一端作为差分放大电路的第一输入端In1、另一端与运放Am的负相输入端连接;R2连接在运放Am的负相输入端与运放Am的输出端之间;R3的一端作为差分放大电路的第二输入端In2、另一端与运放Am的正相输入端连接;R4连接在运放Am的正相输入端与接地端之间。图4中Va表示差分放大电路的第二输入端In2的电压,Vb表示差分放大电路的第一输入端In1的电压,Vout表示差分放大电路输出端的电压,且Vout可通过如下公式(2)确定。
Vout=(Vb-Va)×R2/R1,当R1=R3,R2=R4 (2)
由公式(1)可知,差分放大电路的输出电压Vout=A*Ic*r,其中A=R2/R1。假设T-Box上的备用电池为锂电池,锂电池的内阻最小为20毫欧姆(mΩ),最大为300mΩ左右,为了保证A/DC的检测精度,差分放大电路的输出电压Vout应该在0.1V以上,假设充电电流Ic=1A、放大倍数A=10。
假设在上述步骤S01中,备用电池B将第一电容器C1充电至Va,当在上述步骤S02中,将切换开关SW切换至cb后,则第一电容器C1会通过R3和R4漏电到地(假设运放输入阻抗>>R3+R4),如图4中的(b)所示。相应的,第一电容器C1的电压V
由于差分运放的环路稳定性需求,R2的取值最好<100KΩ,又由于R2>=10*R1,R1取值<10KΩ,则R1+R2<110KΩ,假设C1为1uF,由公式(3)可得:
1ms后,V
10ms后,V
假设备用电池的电压为3V,内阻为20mΩ,则充电1A电流时,在备用电池内阻上产生的压降为20mV。从以上的计算结果可知,1ms后,第一电容器C1损失掉的电压为1%,即为30mV,已经超过需要检测电压(10mV)。也即是,若该检测电路在1ms内完成检测,则其误差已经超过100%。而且,由于电路延迟的影响,如充电单元启动到稳定大概需要10ms左右时间,整个流程很难在1ms内完成。同理,Vb通道也存在类似的问题。因此,该方案实现难度较大,误差较大。
基于此,本申请实施例提供一种蓄电池内阻检测装置,如图5所示,该装置包括:处理电路51、差分放大器52和充电电路53。其中,蓄电池的正极端分别与处理电路51的第一A/DC接口、差分放大器52的第一输入端和充电电路53连接,蓄电池的负极端与接地端连接;处理电路51的第二A/DC接口与差分放大器52的输出端连接,处理电路51的数模转换器(digital/analog converter,D/AC)接口与差分放大器52的第二输入端连接,处理电路51的通信接口与充电电路53连接。图5中A/DC1表示第一A/DC接口,A/DC2表示第二A/DC接口,D/AC1表示D/AC接口,P1表示通信接口。
在本申请实施例中,将处理电路51检测到的蓄电池的电压称为检测电压,比如下文中的第一检测电压和第二检测电压;将差分放大器52输出的电压或者处理电路51检测到的差分放大器52输出的电压称为输出电压,比如下文中的第一输出电压和第二输出电压;将与蓄电池的电压作比较的电压称为比较电压,比如下文中的第一比较电压。在实际用于中,上述检测电压、输出电压和比较电压也可以有其他不同的名称,本申请实施例对此不作具体限定。
基于图5所提供的检测装置,本申请实施例提供一种蓄电池内阻的方法,如图6所示,该方法可以包括以下步骤:S101-S106。
S101:处理电路51通过第一A/DC接口检测蓄电池的第一检测电压。
其中,该蓄电池可以为镍氢电池、镍镉电池、锂电池或者铅电池等。该蓄电池可以安装在T-Box中作为T-Box的备用电池,当然也可以作为其他设备的备用电池,比如,手机、智能穿戴设备等。第一检测电压可以为该蓄电池的空载电压,该空载电压是指该蓄电池未向负载供电、以及未向该蓄电池充电时该蓄电池的电压,比如,该蓄电池作为T-Box中的备用电池、且未向T-Box供电时的电压即为空载电压。
另外,处理电路51的A/DC接口具有模数转换功能,该A/DC接口可以将模拟电压转换为数字电压。处理电路51的第一A/DC接口与蓄电池的正极端连接,从而处理电路51通过第一A/DC接口可以将蓄电池正极端的模拟电压转换为数字电压,也即是,处理电路51可以通过第一A/DC接口可以检测到蓄电池的电压。
具体的,当处理电路51需要对蓄电池充电时,处理电路51可以在对蓄电池充电前通过第一A/DC接口检测蓄电池的空载电压以得到第一检测电压;或者,处理电路51通过第一A/DC接口持续检测蓄电池的空载电压,当检测到的空载电压处于预设空载电压范围时,读取检测的空载电压以得到第一检测电压。即第一检测电压可以是指该蓄电池充电前的空载电压,或者是该蓄电池的处于预设电压范围内的空载电压。
需要说明的是,预设空载电压范围可以事先进行设置,当蓄电池的空载电压处于预设空载电压范围时,蓄电池的空载电压比较稳定,从而检测到的空载电压的准确度较高。其中,不同的蓄电池对应的预设空载电压范围可能相同,也可以不同。比如,当蓄电池为锂电池中的磷酸铁锂电池时,该预设空载电压范围可以为[3.3V,3.35V]。
S102:处理电路51通过D/AC接口向差分放大器52的第二输入端输入第一比较电压并保持,第一比较电压的电压数值接近于第一检测电压的电压数值。
其中,处理电路51的D/AC接口具有数模转换功能,该D/AC接口可以将数字电压转换为模拟电压。处理电路51的D/AC接口与差分放大器52的第二输入端连接,从而可以通过D/AC接口将模拟电压输入到差分放大器52的第二输入端。
具体的,处理电路51可以根据第一检测电压的电压数值设置第一比较电压的电压数值,二者的电压数值可以相等、或者二者的电压数值之间的差值接近于零。第一比较电压可以为数字电压,处理电路51通过D/AC接口将第一比较电压转换为模拟电压后输入到差分放大器52的第二输入端并保持。对于差分放大器52,差分放大器52的第一输入端与蓄电池的正极端连接,从而差分放大器52的第一输入端可以接收到蓄电池正极端的模拟电压(即第一检测电压对应的模拟电压),差分放大器52的第二输入端可以接收到处理电路51通过D/AC接口输入的模拟电压(即第一比较电压对应的模拟电压),差分放大器52通过放大第一检测电压对应的模拟电压与第一比较电压对应的模拟电压的差值后,从差分放大器52的输出端输出放大后的第一差值模拟电压。
需要说明的是,从理论上而言,假设处理电路51的模数转换和数模转换不存在偏差,差分放大器52的两个输入端之间也不存在偏差电压,则在第一检测电压等于第一比较电压的情况下,第一检测电压对应的模拟电压也等于第一比较电压对应的模拟电压,从而差分放大器52从输出端输出放大后的第一差值模拟电压等于0。
但是,在实际应用中,任何电子元器件都是有偏差的,假设处理电路51在模数转换和数模转换时的偏差为ΔV,若处理电路51检测到的第一检测电压对应的模拟电压表示为V1,处理电路51向差分放大器52的第二输入端输入的第一比较电压对应的模拟电压表示为V2,则V1-V2=ΔV。假设差分放大器52的两个输入端之间的偏差电压为Voffset,差分放大器52的放大倍数为K,差分放大器52输出的第一差值模拟电压表示为V3,则V3与V1和V2之间的关系可通过如下公式(I)表示。
V3=(ΔV+Voffset)×K=(V1-V2+Voffset)×K (I)
需要说明的是,差分放大器52的第一输入端可以是正相输入端、第二输入端是负相输入端;或者,差分放大器52的第一输入端是负相输入端、第二输入端可以是正相输入端。图5和S102中的相关描述均以第一输入端是正相输入端、第二输入端是负相输入端为例进行说明。
S103:处理电路51通过第二A/DC接口检测差分放大器52的第一输出电压。
具体的,处理电路51的第二A/DC接口与差分放大器52的输出端连接,当差分放大器52输出第一差值模拟电压时,处理电路51可以通过第二A/DC接口将第一差值模拟电压转换为数字电压,以得到第一输出电压。
可选的,处理电路51通过第二A/DC接口检测第一输出电压的过程中,可以通过微调第一比较电压,使得检测到的第一输出电压处于预设输出电压范围[Vc,Vd]中,Vc可以称为第一预设输出电压,Vd可以称为第二预设输出电压。具体包括:若处理电路51通过第二A/DC接口检测的输出电压小于第一预设电压Vc,则处理电路51可以通过增加第一比较电压的方式使通过第二A/DC接口检测到的输出电压大于或等于第一预设电压Vc;若处理电路51通过第二A/DC接口检测的输出电压大于第二预设电压Vd,则处理电路51可以通过减小第一比较电压的方式使通过第二A/DC接口检测到的输出电压小于或等于第二预设输出电压Vd。上述可选的实现方式中,处理电路51通过微调第一比较电压,使得通过第二A/DC接口检测到的第一输出电压处于预设输出电压范围,可以减小第一输出电压对蓄电池内阻的检测范围的影响,从而提高蓄电池内阻检测的精度。
需要说明的是,预设输出电压范围[Vc,Vd]可以事先进行设置,且预设输出电压范围中的第一预设电压Vc大于0。
示例性的,当第一差值放大电压表示为V3时,处理电路51检测到的第一输出电压也可以表示为V3,且与处理电路51在模数转换和数模转换时的偏差ΔV、差分放大器52的两个输入端之间的偏差电压Voffset之间的关系可通过上述公式(I)表示。
S104:处理电路51控制充电电路53通过恒定电流对蓄电池充电,在充电完成后,通过第一A/DC接口检测蓄电池的第二检测电压。
其中,处理电路51的通信接口与充电电路53连接,处理电路51通过该通信接口可以控制充电电路53,比如,可以开启充电电路53、以及设置充电电路53充电时的恒定电流的大小等。可选的,该恒定电流可以是0至1A,比如,该恒定电流可以为10mA、100mA或者200mA等。
另外,处理电路51的第一A/DC接口与蓄电池的正极端连接,从而处理电路51通过第一A/DC接口可以将蓄电池正极端的模拟电压转换为数字电压,也即是,处理电路51可以通过第一A/DC接口可以检测到蓄电池的电压。
具体的,处理电路51可以控制充电电路53以恒定电流对蓄电池进行充电,处理电路51可以在充电过程中通过第一A/DC接口持续检测蓄电池的电压,即处理电路51可以持续将蓄电池正极端的模拟电压通过第一A/DC接口转换为数字电压,当转换为数字电压稳定、不再变化时,处理电路51可以读取检测到的电压以得到第二检测电压;或者,充电电路53以恒定电流对蓄电池充电一段时间后,处理电路51通过第一A/DC接口将蓄电池正极端的模拟电压转换为数字电压,以得到第二检测电压。对于差分放大器52,差分放大器52的第一输入端与蓄电池的正极端连接,从而差分放大器52的第一输入端可以接收到蓄电池正极端的模拟电压(即第二检测电压对应的模拟电压),差分放大器52的第二输入端可以接收到处理电路51通过D/AC接口输入的模拟电压(即第一比较电压对应的模拟电压),差分放大器52通过放大第二检测电压对应的模拟电压与第一比较电压对应的模拟电压的差值后,从差分放大器52的输出端输出放大后的第二差值模拟电压。
当差分放大器52的两个输入端之间的偏差电压为Voffset时,若第二差值模拟电压表示为V3’,处理电路51检测到的第二检测电压对应的模拟电压为V1’,则V3’与V1’之间的关系可通过如下公式(II)表示。
V3’=(V1’-V2+Voffset)×K (II)
S105:处理电路51通过第二A/DC接口检测差分放大器52的第二输出电压。
具体的,处理电路51的第二A/DC接口与差分放大器52的输出端连接,当差分放大器52输出第二差值模拟电压时,处理电路51可以通过第二A/DC接口将第二差值模拟电压转换为数字电压,以得到第二输出电压。
示例性的,当第二差值放大电压表示为V3’时,处理电路51检测到的第二输出电压也可以表示为V3’,且与处理电路51在模数转换和数模转换时的偏差ΔV、差分放大器52的两个输入端之间的偏差电压Voffset之间的关系可通过上述公式(II)表示。
S106:处理电路51根据恒定电流、第一输出电压、第二输出电压和放大倍数确定蓄电池的内阻。
当处理电路51检测得到第一输出电压和第二输出电压时,处理电路51可以根据恒定电流、第一输出电压、第二输出电压和放大倍数确定蓄电池的内阻。具体的,处理电路可以根据如下公式(III)确定蓄电池的内阻;式中,r表示蓄电池的内阻,I表示恒定电流,K表示放大倍数,V3表示第一输出电压,V3’表示为第二输出电压。
r=(V3’-V3)/(I×K) (III)
下面结合上述公式(I)和(II),对处理电路51确定的蓄电池的内阻是否受处理电路51的模数转换和数模转换时的偏差ΔV、以及差分放大器52的两个输入端之间的偏差电压Voffset的影响进行详细分析说明。
具体的,将上述公式(II)减去公式(I)可以得到如下公式(IV),公式(IV)中V1’与V1的差值即是蓄电池充电前后的电压差,该电压差等于恒定电流I与蓄电池的内阻r的乘积,使用恒定电流I与蓄电池的内阻r的乘积代替公式(IV)中的V1’与V1的差值,即可得到公式(V)。公式(III)和公式(V)是等价的,由此可知,处理电路51根据恒定电流I、第一输出电压V3、第二输出电压V3’和放大倍数K确定的蓄电池的内阻不受电子器件的偏差的影响,从而检测的蓄电池的内阻的精确度较高。
(II)-(I)=V3’-V3=(V1’-V1)×K (IV)
V3’-V3=I×r×K (V)
为便于理解,下面以图7为例,对本申请实施例提供的方法中处理电路51的步骤进行举例说明。如图7所示,处理电路51具体用于执行以下步骤:S21.判断检测的第一检测电压V1是否属于预设空载电压范围[Va,Vb],若否则持续检测并判断,若是则执行S22;S22.读入第一检测电压V1,并设定第一比较电压V2=V1;S23.判断检测的第一输出电压V3是否大于第一预设输出电压Vc,若否则执行S24a,若是则执行S24b;S24a.增加第一比较电压V2,并返回S23;S24b.判断检测的第一输出电压V3是否小于第二预设输出电压Vd,若否则执行S25a,若是执行S25b;S25a.减小第一比较电压V2,并返回S23;S25b.记录第一输出电压V3,打开充电电路53,并设定恒定电流I;S26.延时一段时间T1;S27.记录第二输出电压V3’,并确定蓄电池的内阻r。
示例性的,如下表1所示,通过本申请实施例提供的内阻检测方法,分别对两个蓄电池的内阻进行检测,这两个蓄电池的实际内阻分别为10moh和100moh,通过处理电路51检测到的第一检测电压V1分别为442.55mV和444.69mV,充电电路通过100mA的恒定电流充电一段时间后,检测到的第二检测电压V2分别为546.75mV和1440.45mV,根据上述方法确定的这两个蓄电池的仿真内阻分别为10.42moh和99.576moh,从而可以得到这两个蓄电池的内阻检测的误差分别为4.2%和-0.4%。
表1
当T-Box使用上述内阻检测方法检测得到备用电池的内阻时,T-Box可以根据该内阻在车辆的仪表盘的显示界面上显示相应的参数或者信息,以提示用户备用电池寿命是否终止,进而提示用户及时的更换备用电池。可选的,当检测到的内阻大于内阻阈值(比如,该内阻阈值可以为300moh)时,T-Box可以在显示界面上显示备用电池寿命终止的提示信息。
示例性的,车辆的仪表盘显示界面如图8所示,该显示界面中包括转速显示盘(单位为r/min)、速度显示盘(单位为km/h)和菜单显示界面,该菜单显示界面中可以有T-Box菜单,在T-Box下可以包括备用电池子菜单,该备用电池子菜单中可以显示备用电池的电量、以及是否建议更换备用电池等相关信息。在菜单显示界面的下方可以有工具栏,工具栏中可以设置有以下按键:开关按键、前进按键、后退按键、主菜单按键、音量加按键、音量减按键和返回按键等。
本申请实施例提供的内阻检测方法中,通过根据蓄电池充电前的第一检测电压设定第一比较电压,将第一比较电压作为参考电压与蓄电池充电后的第二检测电压进行比较放大,从而根据放大后的电压确定蓄电池的内阻,且在确定内阻的过程中可以抵消掉差分放大器52的偏差、以及A/DC和D/AC的偏差,从而提高了检测精度,同时对检测装置中差分放大器52的精度要求较低。
上述主要从检测装置中处理电路51的角度对本申请实施例提供的蓄电池的内阻检测方法进行了介绍。可以理解的是,处理电路51为了实现上述功能,其包含了执行各个功能相应的硬件结构和/或软件模块。本领域技术人员应该很容易意识到,结合本文中所公开的实施例描述的各示例的结构及算法步骤,本申请能够以硬件和计算机软件的结合形式来实现。某个功能究竟以硬件还是计算机软件驱动硬件的方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
下面从检测装置中各个硬件结构的角度对本申请实施例提供的检测装置进行描述。在图5所示的检测装置中,处理电路51、差分放大器52和充电电路53对应的执行步骤可以包括:处理电路51用于通过第一A/DC接口检测蓄电池的第一检测电压,并根据第一检测电压设置第一比较电压,通过D/AC接口向差分放大器52的第二输入端输入第一比较电压并保持,第一检测电压等于第一比较电压;差分放大器52用于比较第一检测电压和第一比较电压并放大,以输出第一输出电压;处理电路51还用于通过第二A/DC接口检测第一输出电压;处理电路51还用于控制充电电路53通过恒定电流对蓄电池充电,并在充电完成后通过第一A/DC接口检测蓄电池的第二检测电压;差分放大器52还用于比较第二检测电压和第一比较电压并放大,以输出第二输出电压;处理电路51还用于通过第二A/DC接口检测第二输出电压;处理电路51还用于根据恒定电流、第一输出电压、第二输出电压和放大倍数确定蓄电池的内阻。
进一步的,在上述图5所示的检测装置中,处理电路51中的通信接口可以是通用输入输出(general purpose input output,GPIO)接口或者通讯总线接口,第一A/DC接口、第二A/DC接口和D/AC接口可以有多种可能的实现方式,下面分别对不同的实现方式进行介绍说明。
在一种可能的实现方式中,处理电路51可以是处理芯片,比如该处理芯片可以是中央处理器或者微控制器(MCU)等。该处理芯片内部包括A/DC和D/AC,即该处理芯片具有模数转换功能和数模转换功能,从而该处理芯片可以具有A/DC接口和D/AC接口。示例性的,如图9所示,该处理芯片为MCU,MCU中设置有第一A/DC接口、第二A/DC接口、D/AC接口和GPIO接口,图9中A/DC1表示第一A/DC接口,A/DC2表示第二A/DC接口,D/AC1表示D/AC接口。在图9所示的检测装置中,可由MCU执行上述方法实施例中的S101至S106。
在另一种可能的实现方式中,处理电路51可以是处理芯片和D/AC的组合,或者是处理芯片、A/DC和D/AC的组合。其中,该处理芯片可以是中央处理器或者微控制器MCU等,该D/AC可以是D/AC芯片或者是搭建的模数转换电路,该A/DC也可以是A/DC芯片或者搭建的模数转换电路。当处理电路51是处理芯片和D/AC的组合时,该处理芯片具有模数转换功能,从而该处理芯片具有A/DC接口;该D/AC的输出端可以作为处理电路51的D/AC接口。
示例性的,如图10所示,该处理芯片为MCU,MCU中设置有第一A/DC接口、第二A/DC接口、GPIO接口和输出端口P0,MCU的输出端口P0与D/AC的输入端连接,D/AC的输出端与差分放大器52的第二输入端连接。图10中的(a)以D/AC为模数转换电路为例进行说明。该模数转换电路具体可如图10中的(b)所示,包括:N(N为正整数)阶RC滤波电路和电压跟随器,N阶RC滤波电路的输入端与MCU的输出端口P0连接,N阶RC滤波电路的输出端与电压跟随器的输入端连接,电压跟随器的输出端作为该模数转换电路的输出端。具体的,MCU可以通过输出端口P0输出脉宽调制PWM信号,该PWM信号经过N阶RC滤波电路后输出直流电平,该直流电平经过电压跟随器后输入到差分放大器52的第二输入端。这里的电压跟随器具有隔离前后级、并提高电压驱动能力的作用,从而可以避免后级负载影响了N阶RC滤波电路的稳定性。此外,MCU可以通过调节输出的PWM信号的占空比,调节输入到差分放大器52的第二输入端的电压的大小,即通过调节PWM信号的占空比来增加或减小第一比较电压。具体的,在图10所示的检测装置中,可由MCU执行上述方法实施例中的S101、S103至S106,由MCU和D/AC共同执行上述方法实施例中的S102,即由MCU根据第一比较电压输出PWM信号,由D/AC将该PWM信号转换为模拟信号后输入至差分放大器52的第二输入端。
进一步的,对于上述图5、图9-图10任一图示所提供的检测装置,还可以将该检测装置中的部分器件集成在一个集成电路(integrated circuit,IC)芯片中,或者将该检测装置中的所有器件集成在一个IC芯片中。通过将部分器件或者全部器件集成在一个IC芯片中,可以简化该IC芯片的外围电路,提高集成度。
示例性的,以图9所示的检测装置为例,图11为将该检测装置中的处理电路51和差分放大器52集成在一个IC芯片中的示例,该IC芯片可以设置有两个引脚PIN1和PIN2,PIN1为处理电路51的通信接口与充电电路53连接,PIN2为第一A/DC接口和差分放大器52的第一输入端的连接点、且与蓄电池的正极端和充电电路53连接。或者,以图9所示的检测装置为例,图12为将该检测装置中的处理电路51、差分放大器52和充电电路53集成在一个IC芯片中的示例,该IC芯片可以设置有一个引脚PIN1,PIN1为充电电路53、第一A/DC接口和差分放大器52的第一输入端的连接点,PIN1与蓄电池的正极端连接。
在本申请实施例中,处理电路51向差分放大器52输入的第一比较电压的电压数值与蓄电池充电前的第一检测电压的电压数值相等,第一比较电压的电压数值由处理电路设置,从而可以保证第一比较电压的稳定性。差分放大器52将第一比较电压作为参考电压分别与蓄电池充电前后的第一检测电压和第二检测电压进行比较放大,从而根据放大后的电压确定蓄电池的内阻,且在确定内阻的过程中可以抵消掉差分放大器52的偏差、以及数模转换和模数转换的偏差,从而降低了内阻检测的误差,提高了检测精度,同时对该装置对差分放大器52的精度要求较低。
图13为本申请实施例提供的一种终端的结构示意图,终端包括:处理器601、存储器602、通信接口603、总线604以及上文所提供的蓄电池内阻检测装置605,该检测装置605中可以包括蓄电池。处理器601、存储器602、通信接口603和检测装置605通过总线604连接。蓄电池605作为备用电池,用于为处理器601、存储器602和通信接口604供电。
需要说明的是,关于该终端中蓄电池内阻检测装置606的相关描述可以参见上文中图5-图12的相关描述,本申请实施例在此不再赘述。
其中,处理器601可以是中央处理器单元,通用处理器,数字信号处理器,专用集成电路,现场可编程门阵列或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。其可以实现或执行结合本申请公开内容所描述的各种示例性的逻辑方框,模块和电路。所述处理器601也可以是实现计算功能的组合,例如包含一个或多个微处理器组合,数字信号处理器和微处理器的组合等等。
存储器602可用于存储数据、软件程序以及模块,主要包括存储程序区和存储数据区,存储程序区可存储操作系统、至少一个功能所需的应用程序等,存储数据区可存储该终端的使用时所创建的数据等。处理器602用于对该终端的动作进行控制管理,比如通过运行或执行存储在存储器内的软件程序和/或模块,以及调用存储在存储器内的数据,执行该终端的各种功能和处理数据。通信接口603用于支持该终端进行通信。
总线604可以是外设部件互连标准(peripheral component interconnect,PCI)总线或扩展工业标准结构(extended industry standard architecture,EISA)总线等。所述总线可以分为地址总线、数据总线、控制总线等。为便于表示,图13中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
在一种可能的实现方式中,该终端可以为车辆,进一步的,该车辆还可以包括各种子系统,具体关于车辆的相关描述可以参见图1所示的车辆100的相关描述,本申请实施例在此不再赘述。
在本申请的另一方面,还提供一种芯片系统,该芯片系统包括:蓄电池、以及上文所提供的蓄电池内阻检测装置。可选的,该蓄电池可以集成在该检测装置中,也可以不集成在该检测装置中。在一种可能的实现方式中,该芯片系统还包括:处理器、存储器、通信接口和总线;其中,蓄电池用于为处理器、存储器和通信接口供电。
需要说明的是,关于该芯片系统中蓄电池内阻检测装置的相关描述可以参见上文中图5-图12的相关描述,本申请实施例在此不再赘述。
最后应说明的是:以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何在本申请揭露的技术范围内的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
- 一种蓄电池内阻检测装置及方法
- 一种铅蓄电池内阻检测装置