一种液压锤自动打击控制装置
文献发布时间:2023-06-19 11:54:11
技术领域
本发明应用在液压锤电气控制技术领域,特别是涉及一种液压锤自动打击控制装置。
背景技术
原有的液压锤操作控制方式为人工通过一根手摇杆控制换向阀来实现锤杆的上下行程,完成打击动作。生产时,通常需要至少三名工人配合才能实现对物料的打击成形,其中第一为工人进行上料工作,将物料送至模具中心并把物料扶正,第二位工人操控液压锤的手摇杆控制液压锤锤头的上下动作,对物料进行反复打击,第三位工人通过打击间隙使用夹钳对模具内的物料进行翻转,直至物料打击成形,期间在三人配合生产中,由于需要三人操控,从而达不到自由支配效果,且在打击的过程中需要三人之间默契配合,着重于第二工位与第三工位两名工人协作完成,对于工人配合度要求较高,存在较大的潜在安全隐患,工作效率效率也较低。
发明内容
本发明目的是要提供一种液压锤自动打击控制装置,解决了物料打击成形过程中,由于需要三人操控,从而达不到自由支配效果,且在打击的过程中需要三人之间默契配合,则不能随意更换搭档,且人工操作液压锤时危险系数较高,工作效率效率也较低的问题。
为达到上述目的,本发明采用的技术方案是:
本发明提供了一种液压锤自动打击控制装置,液压锤包括锤身、与锤身滑动连接的锤头、以及控制所述锤头沿着所述锤身纵向运动的换向阀,所述换向阀设置在所述锤身的顶端,自动打击控制装置包括连杆组件、控制连杆组件工作的控制组件,所述连杆组件的一端与换向阀连接,所述控制组件包括控制箱、设置在控制箱内的气动肌腱、调节气动肌腱气压的调节组件以及与调节组件连接的进气管,所述气动肌腱的顶端与连杆组件的另一端固定连接,所述调节组件的出气端与气动肌腱的进气端连接。
进一步地,所述调节组件包括依次连接的进气调压阀、电控比例调压阀和高频电磁阀,所述进气调压阀的进口端与进气管连通,所述高频电磁阀的出口端与气动肌腱的进气端连通。
进一步地,所述高频电磁阀与气动肌腱之间设置有快排阀。
进一步地,所述控制箱的顶端设置有与其内部连通的导向套,所述连杆组件的另一端穿过导向套与气动肌腱的顶端连接。
进一步地,所述液压锤底端一侧设置有脚踏开关,所述脚踏开关与控制组件电连接。
由于上述技术方案运用,本发明与现有技术相比具有下列优点:
本发明的一种液压锤自动打击控制装置,工作时,工人首先通过与半自动打击控制装置电连接的触摸屏设定进气调压阀、电控比例调压阀、高频电磁阀和快排阀的工作参数,此后工人通过踩住脚踏开开关则开启半自动打击控制装置,使气动肌腱充气膨胀收缩使连杆组件带动换向阀动作,实现对物料的反复打击,期间根据需要对物料进行翻转,直至成形,此后松开脚踏开关,程序停止运行,在操控时较为简单、方便,不再受人为的配合不到位而造成的误动作等情况,更为安全,减少人员投入,降低安全风险,提高工作效率。
附图说明
后文将参照附图以示例性而非限制性的方式详细描述本发明的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:
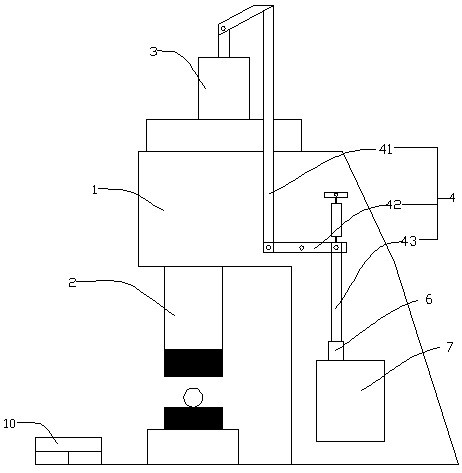
图1是本发明中的实施例中整体结构示意图;
图2是本发明中的实施例中自动打击控制装置的结构示意图。
其中,附图标记说明如下:
1、锤身;2、锤头;3、换向阀;4、连杆组件;41、一级活动杆;42、二级活动杆;43、三级活动杆;5、控制组件;51、控制箱;52、气动肌腱;53、进气管;6、导向套;7、调节组件;71、进气调压阀;72、电控比例调压阀;73、高频电磁阀;74、快排阀;8、第一牵引器;9、第二牵引器;10、脚踏开关。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
参考图1和图2,为本发明提供的一种液压锤自动打击控制装置,液压锤包括锤身1、与锤身1滑动连接的锤头2、以及控制锤头2沿着锤身1纵向运动的换向阀3,换向阀3设置在锤身1的顶端,换向阀3用于控制锤头2抬起和打击物料;自动打击控制装置包括连杆组件4和控制连杆组件4工作的控制组件5,连杆组件4包括一级活动杆41、二级活动杆42和三级活动杆43,二级活动杆43转动连接在一级活动杆41和三级活动杆43之间,一级活动杆41的一端与换向阀3连接,三级活动杆43的一端与控制组件5连接,此时通过控制组件5控制连接组件4上下运动并促使换向阀3工作,从而带动锤头2抬起或者打击;控制组件5包括控制箱51、设置在控制箱51内的气动肌腱52、调节气动肌腱52气压的调节组件7以及与调节组件7连接的进气管53,气动肌腱52的顶端与连杆组件4的另一端固定连接,调节组件7的出气端与气动肌腱52的进气端连接,进气管53的另一端伸出控制箱51并与外界充气装置连接;其中,通过调节组件7调节进入到气动肌腱52内的气压,气动肌腱52充气膨胀时拉动三级活动杆43向下,此时二级活动杆42与三级活动杆43连接的一端也向下,从而带动一级活动杆41向上运动并控制与一级活动杆41另一端连接的换向阀3工作进而控制锤头2的抬起;其中,调节组件7包括依次连接的进气调压阀71、电控比例调压阀72和高频电磁阀73,进气调压阀71的进口端与进气管53连通,高频电磁阀73的出口端与气动肌腱52的进气口连通,其中电控比例调压阀72的作用是快速调节进气调压阀71的输出压力,从而达到控制气动肌腱52的收缩行程;高频电磁阀73在电信号的控制下实现气动肌腱52的快速充气、排气,进一步的,在高频电磁阀73与气动肌腱52之间设置有快排阀74,快排阀74用于辅助高频电磁阀73,加快排气速度。
进一步的,参考图2,在控制箱51的顶端设置有与其内部连通的导向套6,连杆组件4中的三级活动杆43远离二级活动杆42的一端穿过导向套6与气动肌腱52的顶端连接,导向套6限定三级活动杆43使其竖直运动;在二级活动杆42与三级活动杆43连接位置设置有第一牵引器8,第一牵引器8的另一端固定在锤身2上,在气动肌腱52的顶端与控制箱51顶端内壁之间设置有第二牵引器9;气动肌腱52排气复位时,通过连杆组件4的重力、第一牵引器8和第二牵引器9的牵引力的作用下将连杆组件4中的一级活动杆41向下移动并传导到换向阀3,通过换向阀3控制锤头2对物料进行压锤打击。
液压锤底端一侧设置有脚踏开关10,脚踏开关10与控制组件7电连接,脚踏开关10控制半自动打击控制装置的启动和关闭。
综上所述:工作时,工人首先通过电气控制装置设定进气调压阀71、电控比例调压阀72、高频电磁阀73和快排阀74的工作参数,此后工人通过踩住脚踏开关10开启自动打击控制装置,使气动肌腱52充气膨胀收缩使连杆组件4带动换向阀3工作,实现对物料的反复打击,期间根据需要工人对物料进行翻转直至捶打成形,此后松开脚踏开关10,程序停止运行,在操控时较为简单、方便,不再受人为的配合不到位而造成的误动作等情况,更为安全,减少人员投入,降低安全风险,提高工作效率。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
- 一种液压锤自动打击控制装置
- 一种液压破碎用打击机芯和液压破碎锤