一种软体康复致动器
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及医疗康复机械技术领域,特别涉及一种软体康复致动器。
背景技术
人手的运动功能会由于疾病或意外伤害而受损,例如脑卒中患者的典型症状即为手部无法正常活动。为了恢复此类患者的手部运动功能,需要为此类患者进行肢体康复训练。然而,目前市面上的用于肢体康复的致动器运动形式单一、自由度少,不能较好的贴合人手指的运动方式,这导致了患者使用的舒适程度低、且康复效率也较为低下的问题。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种软体康复致动器,其运动形式多样、自由度高,能够较好的贴合人手指的运动方式,从而提高了患者使用的舒适程度,同时提高了康复的效率。
根据本发明实施例的软体康复致动器,包括主体,所述主体包括:
软体执行器,内部分布有多个充气腔室、多个非充气腔室和充气通道,多个所述充气腔室之间通过所述充气通道连通;数据采集模块,与所述软体执行器连接,用于采集来自所述软体执行器的状态参数;驱动模块,与所述充气通道连通,用于调节所述充气通道内的气体量以改变软体执行器的运动状态;控制模块,分别与所述数据采集模块和所述驱动模块相连接,用于根据所述状态参数控制所述驱动模块的工作状态。
根据本发明实施例的软体康复致动器,至少具有如下有益效果:
采用软体执行器并利用与软体执行器相连通的驱动模块调节所述充气通道内的气体量以改变软体执行器的运动状态,能够使得软体康复致动器的运动形式多样、自由度高。与软体执行器连接的数据采集模块能够采集软体执行器的状态参数,控制模块能够根据该状态参数调节软体执行器的运动状态,提高了软体康复致动器的智能化程度。软体致动器中组合有设置充气腔室与非充气腔室,使得软体康复致动器能够较好的贴合人手指的运动方式,从而提高了患者使用的舒适程度,并提高了康复的效率。
可以理解的是,所述软体执行器设置有多个手指分支,每个所述手指分支均与所述数据采集模块和所述驱动模块相连接。
通过将软体执行器的每个手指分支均连接到数据采集模块与驱动模块上,能够实现对每个手指分支进行单独的状态检测与控制。
可以理解的是,所述驱动模块包括真空泵、第一继电器和第一电磁阀;所述真空泵与所述控制模块连接,设置有进气口和出气口,所述进气口设置于所述真空泵的外表面,所述出气口与所述第一电磁阀的常开口连通;所述第一继电器与所述控制模块、所述第一电磁阀相连接,用于调整所述第一电磁阀的工作状态;所述第一电磁阀的常闭口与所述软体执行器的所述充气通道连通。
控制模块连接至驱动模块能够控制真空泵的运行功率以及第一电磁阀的打开程度,从而控制进入各个手指分支的气体量,进而改变软体执行器的运动状态。
可以理解的是,所述驱动模块还包括第二继电器和第二电磁阀;所述第二继电器与所述控制模块、所述第二电磁阀相连接,用于调整所述第二电磁阀的工作状态;所述第二电磁阀的常开口与所述充气通道相连通,所述第二电磁阀的常闭口设置于所述第二电磁阀的外表面。
第二电磁阀常开口与充气通道连通,常闭口设置于第二电磁阀外表面,能够受驱动模块控制放出充气通道内的气体,进而改变软体执行器的运动状态。
可以理解的是,所述驱动模块包括限压阀,所述限压阀设置在所述软体执行器上,且与所述软体执行器的所述充气通道连通。
通过在软体执行器上设置限压阀,能够在充气通道内气压过高时主动泄压,从而避免软体执行器因故障过度充气导致爆炸的情况,提高了产品的安全性能。
可以理解的是,所述数据采集模块包括:角度传感器,与所述控制模块连接,用于采集所述手指分支的弯曲角度,所述角度传感器上连接有回位弹簧;指套,设置在所述软体执行器的所述手指分支上;牵引线,一端连接所述回位弹簧,另一端连接所述指套。
通过牵引线一端连接回位弹簧,另一端连接指套,能够使得角度传感器随着软体执行器的手指分支的运动而采集到手指分支的弯曲角度。
可以理解的是,所述指套包括:第一指套,设置于所述手指分支的远离手掌一端,与所述牵引线连接;第二指套,设置于所述第一指套与手掌侧之间,所述牵引线穿过所述第二指套与所述第一指套和所述回位弹簧连接。
可以理解的是,所述数据采集模块包括与所述控制模块连接的姿态传感器,所述姿态传感器用于检测所述软体康复致动器的整体姿态。
通过设置姿态传感器能够检测软体康复致动器的整体姿态,从而更全面的分析用户的康复状况,提升康复的效率。
可以理解的是,本发明实施例的软体康复致动器还包括通信模块,与所述控制模块连接的通信模块,用于实现所述软体康复致动器的有线或无线通信。
采用通信模块实现软体康复致动器的有线或无线通信,能够使软体康复致动器与上位机之间分离,从而提高用户使用的方便程度。
可以理解的是,所述通信模块采用蓝牙模块。
采用蓝牙模块实现无线通信具有成本低、功耗低的优点。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1为本发明实施例的一种软体康复致动器的原理图;
图2为本发明实施例的手指分支的部分截面图;
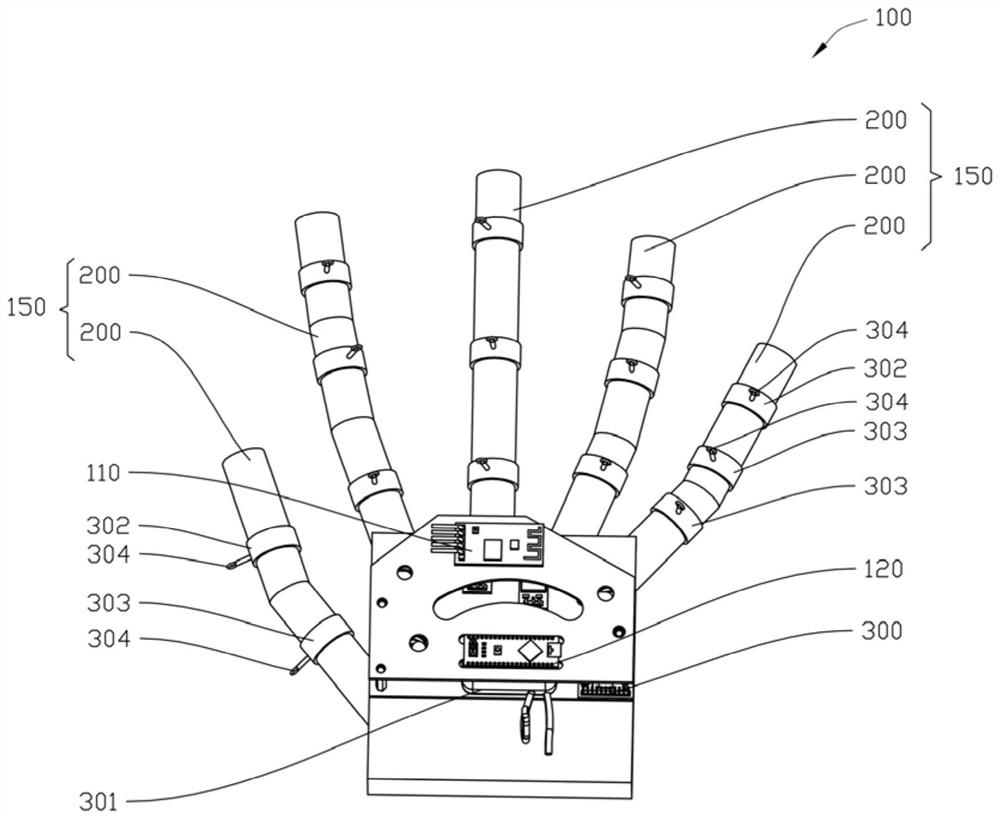
图3为本发明实施例的一种软体康复致动器的结构示意图;
图4为图3所示的一种软体康复致动器的部分结构示意图。
附图标记:主体100、通信模块110、控制模块120、驱动模块130、数据采集模块140、软体执行器150、手指分支200、充气通道201、充气腔室202、非充气腔室203、姿态传感器300、真空泵301、第一指套302、第二指套303、固定环304、角度传感器400、回位弹簧401。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
本发明提供了一种软体康复致动器,包括主体,包括主体,主体包括控制模块、数据采集模块、驱动模块、以及软体执行器;软体执行器内部分布有多个充气腔室、多个非充气腔室和充气通道,多个充气腔室之间通过充气通道连通;数据采集模块与软体执行器连接,用于采集来自软体执行器的状态参数;驱动模块与充气通道连通,驱动模块通过调节充气通道内的气体量来改变软体执行器的运动状态;控制模块与数据采集模块、驱动模块相连接,用于根据状态参数控制驱动模块的工作状态。通过组合设置充气腔室与非充气腔室,使得软体康复致动器运动形式多样、自由度高,能够较好的贴合人手指的运动方式,从而提高了患者使用的舒适程度,同时提高了康复的效率。
下面结合附图,对本发明实施例作进一步阐述。
参照图1,图1为本发明实施例的软体康复致动器的结构示意图,可以理解的是软体康复致动器包括主体100,主体100包括软体执行器150、数据采集模块140、驱动模块130、控制模块120;软体执行器150能够辅助患者进行手部运动,帮助患者恢复手部功能;数据采集模块140与软体执行器150连接,用于采集来自软体执行器150的状态参数;驱动模块130与软体执行器150相连接,能够改变软体执行器150的运动状态;控制模块120与数据采集模块140、驱动模块130相连接,用于根据状态参数控制驱动模块130的工作状态。
具体地,控制模块120可以采用Arduino MEGA 2560开发板模块。
具体地,控制模块120可以采用Arduino Uno R3开发板模块。
具体地,控制模块120可以采用Arduino nano开发板模块。
具体地,控制模块120可以采用STM32开发板模块。
可以理解的是,本发明实施例的软体康复致动器能够与上位机连接并通信,从而将各类数据上传至上位机并从上位机获取控制信号。
具体地,上位机可以采用个人计算机。
具体地,上位机可以采用工控机。
可以理解的是,参照图1,本发明实施例的软体康复致动器还包括通信模块110,通信模块110与控制模块120连接,用于实现软体康复致动器的有线或无线通信。采用通信模块110实现软体康复致动器的有线或无线通信,能够使控制模块120与驱动模块130和上位机分离,从而提高用户使用的方便程度。
可以理解的是,通信模块110可以采用串口通信模块110。
具体地,通信模块110可以采用CP2102串口模块。
具体地,通信模块110可以采用CH341串口模块。
可以理解的是,通信模块110可以采用蓝牙模块。
具体地,通信模块110采用CC2541蓝牙透传模块。
具体地,通信模块110采用JDY-32蓝牙模块。
可以理解的是,通信模块110还可以采用Wifi模块。
具体地,通信模块110可以采用ESP8266 WiFi模块。
具体地,通信模块110可以采用RTL00 WiFi模块。
可以理解的是,软体执行器150设置有多个手指分支200,每个手指分支200均与数据采集模块140和驱动模块130相连接。通过将软体执行器150的每个手指分支200均连接到数据采集模块140与驱动模块130上,能够实现对每个手指分支200进行单独的状态检测与控制,用户可根据自身情况,自由组合各个手指分支200的运动方式。
参照图2,图2为本发明实施例的手指分支200的部分截面图,可以理解的是,软体执行器150内部分布有多个充气腔室202、多个非充气腔室203和充气通道201,多个充气腔室202之间通过充气通道201连通,充气时充气腔室202变形膨胀,室壁相互挤压,进而驱动软体执行器150发生弯曲,而非充气腔室203会吸收充气腔室202的膨胀,通过充气腔室202与非充气腔室203的形状和特定排列能够使得软体康复致动器的运动形式多样、自由度高,能够较好的贴合人手指的运动方式,从而提高了患者使用的舒适程度,提高了康复的效率。
可以理解的是,充气腔室202可以设置为菱形,非充气腔室203可以设置为三角形,两种形状的腔室间隔分布,且充气腔室202之间通过充气通道201连通。通过充气腔室202与非充气腔室203的形状和排列,当向软体执行器150内充气,部分关节处两个相对的充气腔室202发生大变形膨胀,室壁相互挤压,使软体执行器150在关节处发生弯曲,而非关节处的充气腔室202间存在着非充气腔室203的间隔,会吸收充气腔室202的膨胀,使软体执行器150的运动方式更加贴合人手指的运动方式。
可以理解的是,通过改变充气腔室202以及非充气腔室203的形状与排列,能够改变软体执行器150的运动方式,使其可以针对不同患者个性化地定制对应的运动方式,提升康复的效率。
参照图3,图3为本发明实施例的软体康复致动器的结构示意图,可以理解的是,软体执行器150设置有五个手指分支200,分别对应人手的五根手指。
可以理解的是,软体执行器150内部设置有用于检测软体康复致动器佩戴状态的触摸开关。
具体地,触摸开关设置在软体执行器150地每个手指分支200的指尖部位。
具体地,触摸开关采用TTP223触摸开关模块。
可以理解的是,驱动模块130与充气通道201连通,用于向充气通道201中充气或放气。
参照图3,驱动模块130包括用于向软体致动器冲入气体的真空泵301,真空泵301设置有进气口和出气口,进气口设置于真空泵301的外表面。
具体地,驱动模块130还包括第一继电器和第一电磁阀,真空泵301的出气口与第一电磁阀的常开口连通;第一继电器与控制模块120、第一电磁阀相连接,用于调整第一电磁阀的工作状态;第一电磁阀的常闭口与软体执行器150的充气通道201连通。控制模块120连接至驱动模块130能够控制真空泵301的运行功率以及第一电磁阀的打开程度,从而控制进入各个手指分支200的气体量,进而改变软体执行器150的运动状态。
具体地,真空泵301采用可调真空泵。
具体地,真空泵301采用KVP04微型真空泵。
具体地,驱动模块130还包括第二继电器和第二电磁阀;第二继电器与控制模块120、第二电磁阀相连接,用于调整第二电磁阀的工作状态;第二电磁阀的常开口与充气通道201相连通,第二电磁阀的常闭口设置于第二电磁阀的外表面。第二电磁阀常开口与充气通道201连通,常闭口设置于第二电磁阀外表面,能够受驱动模块130控制放出充气通道201内的气体,进而改变软体执行器150的运动状态。
可以理解的是,软体执行器150的每个手指分支200上都设置有第一继电器、第一电磁阀、第二继电器和第二电磁阀。
可以理解的是,驱动模块130包括限压阀,限压阀设置在软体执行器150上,且与软体执行器150的充气通道201连通。通过在软体执行器150上设置限压阀,能够在充气通道201内气压过高时主动泄压,从而避免软体执行器150因故障而过度充气导致爆炸的情况,提高了产品的安全性能。
参照图3,可以理解的是,数据采集模块140包括与控制模块120连接的姿态传感器300,姿态传感器300用于检测软体康复致动器的整体姿态。通过设置姿态传感器300能够检测软体康复致动器的整体姿态,从而更全面的分析用户的康复状况,提升康复的效率。
具体地,姿态传感器300可以采用MPU9250九轴姿态传感器。
具体地,姿态传感器300可以采用GY-BNO055九轴姿态传感器。
参照图4,图4为图3所示的软体康复致动器的部分结构示意图,可以理解的是,数据采集模块140包括:角度传感器400,与控制模块120连接,用于采集手指分支200的弯曲角度,角度传感器400上连接有回位弹簧401;
指套,设置在软体执行器150的手指分支200上,指套包括设置于手指分支200的远离手掌一端,与牵引线连接的第一指套302,以及设置于第一指套302与手掌侧之间的第二指套303;
牵引线,一端连接第一指套302,另一端穿过第二指套303与回位弹簧401连接。通过牵引线一端连接回位弹簧401,另一端连接指套,能够使得角度传感器400随着软体执行器150的手指分支200的运动而采集到手指分支200的弯曲角度。
具体地,角度传感器400可以采用SCA60C角度传感器。
具体地,角度传感器400可以采用SW520D角度传感器。
参照图4,可以理解的是,第一指套302与第二指套303上都设置有固定环304,牵引线一端连接第一指套302上的固定环304,另一端穿过第二指套303上的固定环304与回位弹簧401连接。
参照图4,可以理解的是,每个手指分支200都对应设置有回位弹簧401以及角度传感器400。
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种基于气动软体致动器的手指辅助康复指套及其制造方法
- 一种软体康复致动器