一种双频天线及无人飞行器
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及无人机天线技术领域,特别是涉及一种双频天线及无人飞行器。
背景技术
无人飞行器,是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无线通信链路系统作为无人飞行器系统的重要组成部分,用于建立空地双向数据传输通道,以完成地面控制站对无人机的远距离遥控、遥测和任务信息传输。
现有的无线通信链路系统一般分为机载部分与地面部分。机载部分包括机载数据终端(ADT)和天线,机载数据终端包括RF接收机、发射机以及用于连接接收机和发射机到系统其它部分的调制解调器。地面部分也称地面数据终端(GDT),该终端包括一副或多副天线、RF接收机和发射机以及调制解调器。
发明人在实现本发明的过程中,发现:现有的无人飞行器通常会在起落架内置双频天线,而双频天线为保证任务信息传输质量,会不可避免地增大体积,但天线的体积过大,又不易收容于起落架内,不利于无人飞行器的小型化设计。
发明内容
本发明实施例旨在提供一种双频天线及无人飞行器,以解决现有的双频天线为保证任务信息传输质量而产生天线体积过大的问题。
为解决上述技术问题,本发明实施方式采用的一个技术方案是:提供一种双频天线,包括:
基板;
单极振子,具有第一谐振频率,所述单极振子设置于所述基板上,其包括相互电连接的第一辐射部与第二辐射部,所述第一辐射部与所述第二辐射部分别处于所述单极振子的馈电点的两相对侧;
偶极振子,具有第二谐振频率,所述偶极振子设置于所述基板上,其包括相互电连接的第三辐射部与第四辐射部,所述第三辐射部处于所述第一辐射部靠近所述单极振子的馈电点的一端,所述第四辐射部处于所述第二辐射部靠近所述单极振子的馈电点的一端;及
馈电同轴线,其馈电端分别与所述单极振子的馈电点以及所述偶极振子的馈电点连接,所述馈电同轴线的接地端与所述偶极振子的接地端连接。
可选地,所述第一辐射部包括第一振臂、第一分辐射部以及第二分辐射部;所述第一振臂与所述第二辐射部连接,所述第一振臂的相对的两端分别与所述第一分辐射部以及所述第二分辐射部连接。
可选地,所述第一分辐射部与所述第二分辐射部呈镜像对称设置。
可选地,所述第一分辐射部包括第二振臂与第三振臂;所述第二振臂是由所述第一振臂远离所述第三辐射部的一端沿垂直于所述第一振臂的轴线方向延伸形成的;所述第三振臂是由所述第二振臂远离所述第一振臂的一端弯折延伸形成的。
可选地,所述第三振臂与所述第二振臂之间的夹角为直角或钝角。
可选地,所述第二辐射部包括第四振臂、第三分辐射部以及第四分辐射部;所述第四振臂与所述第一振臂连接,所述第四振臂的相对的两端分别与所述第三分辐射部以及所述第四分辐射部连接。
可选地,所述第三分辐射部与所述第四分辐射部呈镜像对称设置。
可选地,所述第三分辐射部包括第五振臂、第六振臂、第七振臂以及第八振臂;所述第五振臂是由所述第四振臂远离所述第一振臂的一端沿垂直于所述第一振臂的轴线方向延伸形成的;所述第六振臂是由所述第五振臂远离所述第四振臂的一端沿平行于所述第一振臂的轴线方向弯折延伸形成的;所述第七振臂是由所述第六振臂远离所述第五振臂的一端沿垂直于所述第一振臂的轴线方向弯折延伸形成的;所述第八振臂是由所述第七振臂远离所述第六振臂的一端弯折延伸形成的。
可选地,所述第七振臂与所述第八振臂之间的夹角为直角或钝角。
可选地,所述第一辐射部、所述第二辐射部、所述第三辐射部以及所述第四辐射部沿所述基板的纵轴共轴设置。
可选地,所述基板上开设有馈电孔;所述馈电孔处于所述第一辐射部与所述第三辐射部的叠置区域内,并且所述单极振子的馈电点与所述偶极振子的馈电点均与所述馈电孔共轴设置。
可选地,所述第二辐射部与所述第四辐射部至少部分重叠设置。
可选地,所述基板开设有第一缺口与第二缺口;所述第一缺口处于所述第一辐射部与所述第三辐射部共同围合的区域内;所述第二缺口处于所述第二辐射部与所述第四辐射部共同围合的区域内。
可选地,所述第一谐振频率为900MHz,所述第二谐振频率为2.4GHz。
可选地,所述双频天线还包括阻隔件;所述阻隔件设置于所述馈电同轴线与所述基板之间,所述阻隔件用于增大所述馈电同轴线与所述基板之间的间隙。
为解决上述技术问题,本发明实施方式采用的另一个技术方案是:提供一种无人飞行器,包括:
机体,设有起落架;
驱动组件,包括电机和螺旋桨,所述电机安装于所述机体上,所述螺旋桨安装于所述电机;
飞行控制系统,安装于所述机体,所述飞行控制系统与所述电机通信连接,用于控制所述电机,以驱动所述螺旋桨转动;
如上述所述的双频天线,安装于所述起落架内,所述双频天线与所述飞行控制系统通信连接。
本发明实施方式的有益效果是:区别于现有技术的情况,本发明提供的双频天线及无人飞行器,通过调整单极振子与偶极振子在基板上的布局方式以实现双频天线的最佳阻抗匹配,仿真结果说明该天线在第一谐振频率f
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使用的附图作简单地介绍,显而易见地,下面所描述的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据附图获得其他的附图。
图1为本发明其中一实施例提供的无人飞行器的结构示意图;
图2为图1所示的无人飞行器的各模块示意框图;
图3为图1所示的无人飞行器的双频天线的结构示意图;
图4为图3所示的双频天线的馈线另一安装方式的结构示意图;
图5为图3所示的双频天线中的第一辐射部的一种替换方式的示意图;
图6为图3所示的双频天线散射参数示意图;
图7为图3所示的双频天线的900MHz天线方向图;
图8为图3所示的双频天线的2.4GHz天线方向图;
图9为本发明另一实施例提供的双频天线的结构示意图;
图10为本发明另一实施例提供的双频天线的结构示意图;
图11为本发明另一实施例提供的双频天线的结构示意图;
图12为本发明另一实施例提供的双频天线的结构示意图;
图13为本发明另一实施例提供的双频天线的结构示意图;
图14为本发明另一实施例提供的双频天线的结构示意图;
图15为本发明另一实施例提供的双频天线的结构示意图。
具体实施方式
为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”/“固接于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
此外,下面所描述的本发明不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
本发明实施例提供的双频天线可应用于无人飞行器中,本发明实施例中的无人飞行器可以应用于军用以及民用场景中,民用场景例如包括航拍、快递运输、灾难救援、观察野生动物、测绘、新闻报道、电力巡检等应用场景中。
其中,无人飞行器可包括固定翼无人飞行器和旋转翼无人飞行器,例如直升机、四旋翼机和具有其他数量的旋翼和/或旋翼配置的飞行器。无人飞行器可以用于跟踪目标,在无人飞行器跟踪目标的过程中,有可能会遇到障碍物。无人飞行器需跟踪目标的同时躲避障碍物,以实现正常飞行。其中,目标可以为任何合适的可移动或不可移动物体,包括交通工具、人、动物、建筑物、山川河流等。障碍物例如建筑物、山体、树木、森林、信号塔或其他可移动或不可移动物体。
为便于说明,本发明以双频天线安装于固定翼无人飞行器为例,应当理解的是,以下所述仅是示例性的,并非因此限制本发明的专利范围。
请一并参阅图1以及图2,为本发明提供的一种固定翼无人飞行器,包括机体10、驱动组件20、飞行控制系统30以及双频天线40。
具体的,机体10包括机身110、机翼120以及尾翼130。机翼120设置于机身110的一侧,优选地,机翼120的数量为两个,两个机翼120分别设置于机身110的两相对侧,机翼120远离机身110的一端安装有驱动组件20,驱动组件20包括电机210和螺旋桨220,电机210定子固定于机翼120远离机身110的一端,螺旋桨220安装于电机210转子上,尾翼130设置于机身110的尾部,机身110上设有起落架111,起落架111用于支撑机身110,双频天线40安装于起落架111内,机身110内设有安装空间(图未示),该安装空间用于收容并固定飞行控制系统30,飞行控制系统30分别与电机210以及双频天线40通信连接,飞行控制系统30用于控制电机210为无人飞行器提供飞行动力,以及通过双频天线40收发地面数据终端的控制信号。
为便于固定翼无人飞行器在飞行过程中采集图像数据,可选地,固定翼无人飞行器还包括航拍云台50,航拍云台50安装于机身110的头部,与双频天线40通信连接,航拍云台50通过双频天线40向地面数据终端传输图像数据。
值得说明的是,由于传统的固定翼无人飞行器的起落架111的尺寸限制而只能容纳如2.4GHz的高频段微带天线,而为了将低频段的双频天线40安装于起落架111内,起落架111的形状也由原直条状变化为现外弓状,在增加起落架111的长度的同时,也使得机身110具有良好地支撑性。
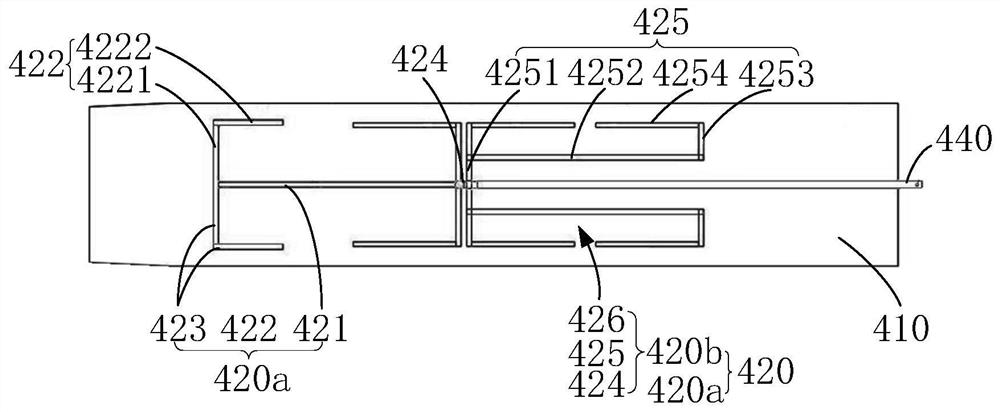
请一并参阅图3与图4,双频天线40包括基板410、具有第一谐振频率的单极振子420、具有第二谐振频率的偶极振子430以及馈电同轴线440。
基板410收容于起落架111内,单极振子420与偶极振子430均设置于基板410上,单极振子420包括相互电连接的第一辐射部420a与第二辐射部420b,第一辐射部420a与第二辐射部420b分别处于单极振子420的馈电点的两相对侧,偶极振子430处于第一辐射部420a与第二辐射部420b之间,其中,单极振子420的馈电点与偶极振子430的馈电点分别与馈电同轴线440的馈电端连接,馈电同轴线440远离基板410的一端,即与馈电同轴线440的馈电端相对的另一端与飞行控制系统30连接。
通过调整单极振子420与偶极振子430在基板410上的布局方式以实现双频天线40的最佳阻抗匹配,在保证任务信息传输质量的同时也能够收容于起落架111,满足内置的空间尺寸要求,有利于无人飞行器的小型化设计。
对于上述的基板410,请继续参阅图3,基板410大致呈长方体板状结构,具体的,基板410上还开设有馈电孔(未示出),馈电孔用于供馈电同轴线440的馈电探针插入固定,以分别单极振子420以及偶极振子430馈电。
为减小双频天线40的性能的差异和变化,可选地,基板410选用介电常数较小的材料介质,例如,基板410为由FR-4等级的材质制成的基板410,其中,FR-4是一种耐燃材料等级的代号,所代表的意思是树脂材料经过燃烧状态必须能够自行熄灭的一种材料规格,它不是一种材料名称,而是一种材料等级,因此目前一般基板410所用的FR-4等级材料就有非常多的种类,但是多数都是以所谓的四功能(Tera-Function)的环氧树脂加上填充剂(Filler)以及玻璃纤维所做出的复合材料。应当理解的是,可根据实际设计要求与制造成本的需要,基板410还可以是采用其他材质,例如,塑料、泡沫等制备而成,具有特定形状的非导电结构。
对于上述的单极振子420的第一辐射部420a,请继续参阅图3,第一辐射部420a包括第一振臂421、第一分辐射部422以及第二分辐射部423。第一振臂421沿平行于基板410的纵轴方向自馈电孔处朝基板410远离机身110的一端延伸,优选地,第一振臂421与基板410平行于纵轴方向的对称线共线,第一振臂421靠近馈电孔的一端与第二辐射部420b连接,第一振臂421远离馈电孔的一端分别与第一分辐射部422以及第二分辐射部423连接。
值得说明的是,第二分辐射部423与第一分辐射部422呈镜像对称设置,是指第二分辐射部423与第一分辐射部422相对于第一振臂421呈轴对称。换言之,第二分辐射部423可以认为是第一分辐射部422沿第一振臂421翻转得到的,因而关于第二分辐射部423的结构可参阅第一分辐射部422即可,在此不再赘述。
具体的,第一分辐射部422包括第二振臂4221与第三振臂4222。第二振臂4221是由第一振臂421远离馈电孔的一端沿垂直于基板410的纵轴方向朝基板410的一侧延伸形成的,第三振臂4222是由第二振臂4221远离第一振臂421的一端弯折延伸形成的,并且第三振臂4222与第二振臂4221呈夹角设置。
应当理解的是,在本发明实施例中,第一辐射部420a采用振臂的走线方式进行谐振,但在本发明其他实施例中,请参阅图5,第一辐射部420a还可以采用面积较大的微带来替代,其具有与振臂相同的谐振效果。
为避免第一振臂421与第三振臂4222之间的信号发生相互干扰,优选地,第一振臂421与第三振臂4222之间的距离大于两者之间的信号干扰距离,例如,在本发明实施例中,请一并参阅图3以及图9,第三振臂4222与第二振臂4221之间呈直角设置,第三振臂4222远离第二振臂4221的一端指向第二辐射部420b或指向基板410靠近机身110的一端,第一振臂421与第三振臂4222之间的距离即为第一振臂421的两端之间的距离,该距离大于两者之间的信号干扰距离。应当理解的是,在本发明另一实施例中,请参阅图10,第三振臂4222与第二振臂4221之间呈钝角设置,即第三振臂4222远离第二振臂4221的一端指向基板410的一侧,此时第一振臂421与第三振臂4222之间的距离为第三振臂4222靠近第二振臂4221的一端至第一振臂421之间的距离,该距离大于两者之间的信号干扰距离。
对于上述的单极振子420的第二辐射部420b,第二辐射部420b包括第四振臂424、第三分辐射部425以及第四分辐射部426。第四振臂424沿平行于基板410的纵轴方向自馈电孔处朝基板410靠近机身110的一端延伸,优选地,第四振臂424与基板410平行于纵轴方向的对称线共线,第四振臂424靠近馈电孔的一端与第一振臂421靠近馈电孔的一端连接,第四振臂424远离馈电孔的一端分别与第三分辐射部425以及第四分辐射部426连接。
值得说明的是,第三分辐射部425与第四分辐射部426呈镜像对称设置,是指第三分辐射部425与第四分辐射部426相对于第四振臂424呈轴对称。换言之,第四分辐射部426可以认为是第三分辐射部425沿第四振臂424翻转得到的,因而关于第四分辐射部426的结构可参阅第三分辐射部425即可,在此不再赘述。
具体的,第三分辐射部425包括第五振臂4251、第六振臂4252、第七振臂4253以及第八振臂4254。第五振臂4251是由第四振臂424远离馈电孔的一端沿垂直于基板410的纵轴方向朝基板410的一侧延伸形成的,第六振臂4252是由第五振臂4251远离第四振臂424的一端沿平行于基板410的纵轴方向朝基板410靠近机身110的一端延伸形成的,第七振臂4253是由第六振臂4252远离第五振臂4251的一端沿垂直于基板410的纵轴朝基板410的一侧延伸形成的,并且第七振臂4253的延伸方向与第五振臂4251的延伸方向相同,第八振臂4254是第七振臂4253远离第六振臂4252的一端弯折延伸形成的,并且第八振臂4254与第七振臂4253呈夹角设置。
为避免第六振臂4252与第八振臂4254之间的信号发生相互干扰,优选地,第六振臂4252与第八振臂4254之间的距离大于两者之间的信号干扰距离,例如,在本发明实施例中,请继续一并参阅图3以及图9,第六振臂4252、第七振臂4253以及第八振臂4254三者之间呈直角设置,第八振臂4254远离第七振臂4253的一端指向第一辐射部420a或指向基板410远离机身110的一端,第八振臂4254与第六振臂4252之间的距离即为第七振臂4253的两端之间的距离,该距离大于两者之间的信号干扰距离。应当理解的是,在本发明另一实施例中,请继续参阅图10,第八振臂4254与第七振臂4253之间呈钝角设置,即第八振臂4254远离第七振臂4253的一端指向基板410的一侧,此时第八振臂4254与第六振臂4252之间的距离为第八振臂4254靠近第七振臂4253的一端至第六振臂4252之间的距离,该距离大于两者之间的信号干扰距离。此外,为避免馈电同轴在信号传输时与第二辐射部420b发生相互干扰,优选地,第六振臂4252与馈电同轴线440之间的距离大于两者之间的信号干扰距离。
为保证单极振子420具有良好地天线增益,优选地,第一振臂421与第一分辐射部422的总长度以及第四振臂424与第三分辐射部425的总长度均被控制在第一谐振频率波长的1/8~3/4的长度范围内。
对于上述的偶极振子430,请继续图4,偶极振子430包括相互电连接的第三辐射部430a与第四辐射部430b。第三辐射部430a处于靠近第一辐射部420a的一端,并且第三辐射部430a与第一振臂421靠近馈电孔的一端至少部分重叠,第四辐射部430b处于靠近第二辐射部420b的一端,并且第四辐射部430b与第四振臂424至少部分重叠。
值得说明的是,第三辐射部430a与第四辐射部430b呈镜像对称设置,是指第三辐射部430a与第四辐射部430b相对平行于基板410的对称轴呈轴对称。换言之,第四辐射部430b可以认为是第三辐射部430a沿第四振臂424翻转得到的。
具体的,第三辐射部430a包括第五分辐射部431以及第六分辐射部432,第五分辐射部431与第六分辐射部432沿基板410的对称轴呈轴对称设置,可选地,第五分辐射部431包括第九振臂4311与第十振臂4312。第九振臂4311是由第一振臂421靠近馈电孔的一端沿垂直于基板410的纵轴方向朝基板410的一侧延伸形成的,并且第九振臂4311的长度与第二振臂4221的长度,或者第五振臂4251与第七振臂4253的总长度均相同,第十振臂4312是由第九振臂4311远离第一振臂421的一端弯折延伸形成的,并且第十振臂4312与第九振臂4311呈夹角设置。
为避免第十振臂4312与第一振臂421之间的信号发生相互干扰,优选地,第十振臂4312与第一振臂421之间的距离大于两者之间的信号干扰距离,例如,在本发明实施例中,第十振臂4312与第九振臂4311呈直角设置,其中,第十振臂4312远离第九振臂4311的一端指向第三振臂4222,第十振臂4312与第一振臂421之间的距离即为第九振臂4311的两端之间的距离,该距离大于两者之间的信号干扰距离。
第四辐射部430b包括第七分辐射部433以及第八辐射部,第七分辐射部433与第八分辐射部434沿基板410的对称轴呈轴对称设置,可选地,第七分辐射部433包括第十一振臂4331与第十二振臂4332。第十一振臂4331是由第四振臂424靠近馈电孔的一端沿垂直于基板410的纵轴方向朝基板410的一侧延伸形成的,并且第十一振臂4331与第五振臂4251至少部分重叠,第十二振臂4332是由第十一振臂4331远离第四振臂424的一端弯折延伸形成的,并且第十二振臂4332与第十一振臂4331呈夹角设置。
为避免第十二振臂4332与第六振臂4252之间的信号发生相互干扰,优选地,第十二振臂4332与第六振臂4252之间的距离大于两者之间的信号干扰距离,例如,在本发明实施例中,第十二振臂4332与第十一振臂4331呈直角设置,其中,第十二振臂4332远离第十一振臂4331的一端指向第八振臂4254,第十二振臂4332与第六振臂4252之间的距离即为第十一振臂4331未与第五振臂4251重叠部分的长度,该长度大于两者之间的信号干扰距离。
为保证偶极振子430具有良好地天线增益,优选地,第九振臂4311与第十振臂4312的总长度以及第十一振臂4331与第十二振臂4332的总长度均被控制在第二谐振频率波长的1/8~3/4的长度范围内。
对于上述的馈电同轴线440,馈电同轴线440包括同轴设置的内导体(图未示)、外导体(图未示)以及屏蔽层(图未示)。其中,馈电同轴线远离飞行控制系统30的一端以探针的方式安装于馈电孔,探针与外导体相连接的部分与单极振子420的馈电点电连接,探针与内导体相连接的部分与偶极振子430的馈电点电连接,探针与屏蔽层相连接的部分与偶极振子430的接地端电连接。值得说明的是,单极振子420的馈电点、偶极振子430的馈电点以及偶极振子430的接地端均与馈电孔共轴设置。
为便于调整单极振子420和/或偶极振子430的谐振波形,可选地,基板410上分别开设有第一缺口411与第二缺口412。请一并参阅图11、图12以及图13,第一缺口411处于第一辐射部420a与第三辐射部430a共同围合的区域内,第二缺口412处于第二辐射部420b与第四辐射部430b共同围合的区域内,具体的,第一缺口411与第二缺口412的数量均为两个,一第一缺口411处于第一分辐射部422与第三辐射部430a之间,另一第一缺口411处于第二分辐射部423与第三辐射部430a之间,一第二缺口412处于第三分辐射部425与第四辐射部430b之间,另一第二缺口412处于第四分辐射部426与第四辐射部430b之间。进一步的,第一缺口411与第二缺口412的形状为倒T形、L形以及倒L形中的任意一种。
应当理解的是,在本发明其他实施例中,请参阅图14,第一缺口411与第二缺口412可以替换成第一开口411与第二开口412,例如,第一开口411与第二开口412的形状为一字形。
为减小馈电同轴线440在信号传输时对单极振子420和/或偶极振子430所发射谐振波的信号干扰,在本发明其他实施例中,请参阅图15,双频天线40还包括阻隔件60,阻隔件60设置于馈电同轴线440与基板410的表面之间,用于增大馈电同轴线440与基板410之间的间隙,可有效地改善信号干扰的影响。进一步地,阻隔件60可以为非导体材料,例如,泡棉或胶体,在增大馈电同轴线440与基板410之间的间隙的同时,也可将同轴线固定住。
请参阅图6,为本发明实施例提供的双频天线40在低频段以及高频段的S参数示意图。双频天线40可以工作在第一谐振频段870MHz~940MHz(低频段)和第二谐振频段2.36GHz~3GHz(高频段)。因此,可以实现对第一谐振频率为900MHz以及第二谐振频率为2.4GHz两个频段的覆盖。应当理解的是,本发明实施例中的单极振子420与偶极振子430还可以工作在其他两个不同的频段。
图7和图8分别为本发明实施例提供的双频天线40在低频段以及高频段天线方向图。如图7和图8所示,本发明实施例提供的天线在低频段以及高频段两个频段上都具有良好的方向性,全向性好,没有特定方向上的缺陷。
在本发明实施例中,通过调整单极振子420与偶极振子430在基板410上的布局方式以实现双频天线40的最佳阻抗匹配,仿真结果说明该天线在第一谐振频率f
以上所述仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种双频天线及无人飞行器
- 双频天线以及无人飞行器