一种方型电池四工位自动称重刻二维码设备
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及一种锂离子电池生产装置,特别是涉及一种方型电池四工位自动称重刻二维码设备。
背景技术
传统的锂离子电池自动称重刻二维码设备采用一工位或双工位搬运,称重速度慢,工作效率低。因此很有必要开发一种方型电池四工位自动称重刻二维码设备。
发明内容
本发明的目的就是针对上述问题,提供一种方型电池四工位自动称重刻二维码设备。
本发明所采用的技术方案是:一种方型电池四工位自动称重刻二维码设备,包括:一台四工位水车式上料装置、一台四工位电子秤进料搬运机械手、一套四工位电子秤、一台四工位刻码搬运机械手、一台四工位收料搬运机械手、一组激光刻码机、一条合格品收料输送带和一条不合格品收料输送带,所述的四工位水车式上料装置设在设备前面的右侧,四工位电子秤设在设备后面的右侧,四工位搬运机械手设在右侧上方,四工位搬运机械手的吸盘设在四工位水车式上料装置与四工位电子秤之间并且吸盘位置与四工位水车式上料装置和四工位电子秤放电池的位置对应,四工位搬运机械手搬运方向为由前往后的方向;所述的一组激光刻码机设在左侧后方,一组激光刻码机设有两套激光刻码机,四工位刻码搬运机械手设在设备后面的中部,四工位刻码搬运机械手吸盘位置与四工位电子秤放电池的位置对应,四工位电子秤放电池的位置与激光刻码位对应,四工位刻码搬运机械手搬运方向为由右往左的方向,两套激光刻码机的两个激光头对应其中两个电池的激光刻码位,刻码中四工位刻码搬运机械手吸附电池移位到另外两个电池的激光刻码位;所述的合格品收料输送带和不合格品收料输送带设在设备左侧,两输送带前后向并排,两输送带输送的方向由右往左输送,四工位收料搬运机械手设在设备的左侧的上方,四工位收料搬运机械手的吸盘设在激光刻码位与两输送带之间并且吸盘位置与激光刻码位置对应,四工位收料搬运机械手搬运方向为由后往前的方向,工作时四工位收料搬运机械手将合格品电池搬运到合格品收料输送带,将不合格品搬运到不合格品收料输送带。
本发明的有益效果:由于采用四工位上料送料称重和刻码,效率比传统的提升一倍以上,在铝壳大面上刻上二维码并与电池干重进行绑定,能够对电池的注液量进行点对点精准控制。避免了注液量少液、多液的问题,提升了电池生产质量。
附图说明
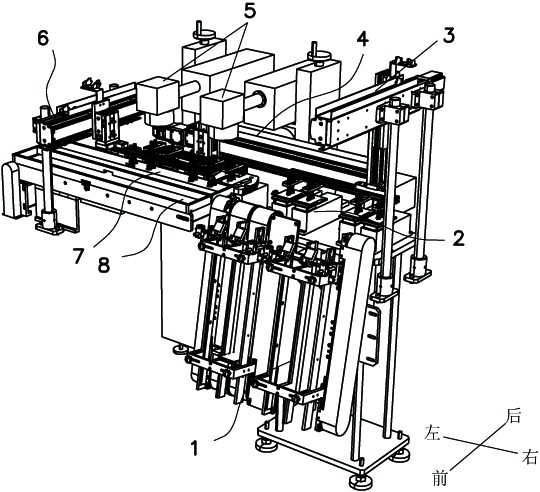
图1为本发明其中一个实施例的立体示意图。
图2为图1的主要部件分解的立体示意图。
图3为四工位水车式上料装置的立体示意图。
图4为四工位搬运机械手的立体示意图。
具体实施方式
如图1和图2所示,本发明包括:电子称和刻码定位模具激光刻码机、一台四工位水车式上料装置1、一台四工位电子秤进料搬运机械手3、一套四工位电子秤2、一台四工位刻码搬运机械手4、一台四工位收料搬运机械手6、一组激光刻码机5、一条合格品收料输送带7、一条不合格品收料输送带8和控制电路。所述的四工位水车式上料装置设在设备前面的右侧,本发明中的“设备”指方型电池四工位自动称重刻二维码设备,四工位电子秤设在设备后面的右侧,四工位搬运机械手设在右侧上方,四工位搬运机械手的吸盘设在四工位水车式上料装置与四工位电子秤之间并且吸盘位置与四工位水车式上料装置和四工位电子秤放电池的位置对应,本发明中的“位置对应”,指滑动的四套吸盘的位置与放置电池的位置的间距相同,四套吸盘滑动到电池位时正好能吸住电池大面的中部,或滑动部件滑动到工位位置时工作件正好与工位位置对应。四工位搬运机械手搬运方向为由前往后的方向。所述的一组激光刻码机设在左侧后方,一组激光刻码机设有两套激光刻码机,四工位刻码搬运机械手设在设备后面的中部,四工位刻码搬运机械手吸盘位置与四工位电子秤放电池的位置对应,四工位电子秤放电池的位置与激光刻码位对应,四工位刻码搬运机械手搬运方向为由右往左的方向,两套激光刻码机的两个激光头对应其中两个电池的激光刻码位进行刻码,两个电池刻码后四工位刻码搬运机械手吸附电池移位到另外两个电池的激光刻码位刻码。这样激光刻码分两步完成,在不影响正常工作喽流程的情况下节省了设备投入的成本。所述的合格品收料输送带和不合格品收料输送带设在设备左侧,两输送带前后向并排,两输送带输送的方向由右往左输送,四工位收料搬运机械手设在设备的左侧的上方,四工位收料搬运机械手的吸盘设在激光刻码位与两输送带之间并且吸盘位置与激光刻码位位置对应,四工位收料搬运机械手搬运方向为由后往前的方向,工作时四工位收料搬运机械手将合格品电池搬运到合格品收料输送带,将不合格品搬运到不合格品收料输送带。这样在自动称重和刻码的同时将不合格的电池筛选出来,将合格电池输送集中,工作效率大幅度提高。
如图3所示,本发明的四工位水车式上料装置包括四条竖向排列的输送带11,输送带支架13、电池托板12、感应器、电机,感应器为光电感应器,设在输送到上端一侧,用于检测电池到输送带上端位置后输送带停止运行。电机设在输送到的其中一端,用于传动输送带运行运行。每条输送带上设有3-6个用于放置层叠电池的电池托板12,电池托板用于放置电池,电池托板面与输送带的平面垂直。运行中前部的电池托板向上运行,输送带四工位水车式360度旋转上料,操作方便。输送带支架与设备机架连接。
如图4所示,四工位电子秤进料搬运机械手3包括一条四工位连杆34、四套吸杆35、一个气缸32、一对高度调节光轴36、一对底座38、一套水平设置的水平导轨31、一套伺服电机37、竖向升降板39和竖向导轨33,四工位连杆为型材,型材上下面上设有用于连接的螺钉槽,型材水平设置,四工位连杆下面设有四套吸杆,每套吸杆设有一对吸杆,每对吸杆通过连接块与型材下面的螺钉连接槽连接,四工位连杆根据输送工件的工位的位置可以调节方向,即四工位连杆可以左右向设置,也可前后向设置。一对光轴竖向设置,光轴的下端与底座连接,光轴的上部通过可调节水平导轨连接块与水平导轨连接,水平导轨通过导轨支架与导轨座连接,气缸的一侧通过水平导轨滑块与水平导轨连接,气缸的另一侧通过竖向导轨与竖向升降板连接,竖向升降板的下端设有水平连接板,水平连接板通过螺钉与型材的螺钉槽连接并可调节连接的位置;气缸活塞与竖向升降板的下端的水平连接板连接,伺服电机通过滚珠丝杆与水平导轨滑块连接,当启动伺服电机,滚珠丝杆带动四工位连杆和四套吸杆沿水平导轨平移,当气缸动作,气缸带动四工位连杆和四套吸杆沿竖向导轨竖向滑动。本发明的四工位刻码搬运机械手4和一台四工位收料搬运机械手6的结构与四工位电子秤进料搬运机械手3结构相同,所不同的就是设置的位置不同,搬运的方向不同。
本发明的工作原理:员工将层叠的一组电池装载在水车式上料装置的下部的每个电池托板12上,点击启动按钮,电池到达感应区域时,皮带停止,四工位电子秤进料搬运机械手将上升到上端的四个电池吸取并移动放置于电子称托盘上,电子称的重量数据会上传至PLC中,此时四工位刻码搬运机械手会将称重完的电池搬运至刻码定位模具上,PLC同时给信号于激光刻码机,对称重合格的每只电池进行刻二维码,此过程中如果有称重下限或上限电池,激光不刻码,刻码过程中PLC将每只电池的重量数据与二维码进行绑定上传至MES系统中,采用两套激光刻码,每套连续可码两个电池,四个电池分两次刻码,这样大幅度节省设备成本, 刻码完毕后四工位收料搬运机械手6将定位模具上的电池吸取并分选,合格品放在合格品收料输送带7上,重量不合格的放置不合格品收料输送带8上,此过程完成称重刻二维码的动作循环。
在本发明的描述中,需要说明的是,术语 “上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
- 一种方型电池四工位自动称重刻二维码设备
- 一种方型电池四工位自动称重刻二维码设备