一种结构模型参数未知时动响应预测新方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及结构动响应的预测方法领域,特别是涉及一种结构模型参数未知时动响应预测新方法。
背景技术
动力学响应估计是结构动力学的经典问题,属于正问题范畴,在结构的研发设计中必须予以考虑。现有的响应预测方法主要包括:模态叠加法、杜哈梅积分方法、Newmark数值计算方法等等。这些都属于传统解决动力学响应估计的方法,需要明确的动力学模型参数,事实上,很多结构的动力学模型参数很难确定或者本身就存在不确定性,这给动响应预测带来了很大的挑战。
近年来,卷积神经网络(CNN)在图像分类、目标检测、图像语义分割等领域取得了突破,可以用来解决分类和回归这两种问题。若将动响应的识别问题看成回归问题,则可以利用CNN实现结构动响应的预测。
相比于传统的动力学响应估计方法,CNN拥有强大的特征学习与分类能力。因此基于CNN的动响应预测方法利用训练好的深度学习网络,不依赖于准确的动力学模型参数,能进一步提高预测的准确性和鲁棒性,具有巨大的发展前景。
发明内容
为了解决上述问题,本发明一种结构模型参数未知时动响应预测新方法,运用卷积神经网络算法对结构动响应进行预测。需要事先用动响应及外激励数据训练得到准确的卷积神经网络模型,再通过输入结构的位移,速度和激励,预测得到系统的加速度响应。该方法无需了解结构的动力学模型参数,对抗噪声能力较好,也适用于工程实际中响应的识别问题,并且可以根据需要预测出相应的加速度、速度或者位移响应信息。
本发明提供一种结构模型参数未知时动响应预测新方法,具体步骤如下:
1)确定动响应预测的分析模型;
确定动响应预测的分析模型步骤,其中:
将结构的位移、速度和激励作为输入层的输入信号;
确定该卷积神经网络需要几个卷积层和池化层;
确定这些卷积层中的卷积核的大小和维数,以及池化层中的池化视野和步长;
2)建立基于一维卷积运算和二维卷积运算的多自由度系统系统的CNN模型,将输入层的输入信号,由卷积层进行卷积运算,再通过池化层,选择再次通过卷积层和池化层,以达到最佳效果;
进行卷积与池化步骤,其中:
在卷积层中,用已经确定过的卷积核矩阵在输入矩阵上滑动并进行点积;
在池化层中,使用选定的池化视野和步长来降低数据体的空间尺寸;
根据选择的卷积层和池化层个数,可依次代入到卷积层和池化层中进行运算;
3)将得到的数据放入全连接层,通过最小化模型的预测值与理想的目标值之间的差值,训练得到较好的CNN模型;
4)利用训练好的卷积神经网络,输入结构的位移,速度和激励,预测到结构此时的加速度;
预测到结构的动响应,其中:
使用不包含在训练集中的验证集数据校验得到的模型;
使用不包含在训练集、验证集中的测试集数据评估CNN模型的有效性;
将评估有效的模型用于动响应预测,输入结构的位移,速度和激励,预测得到此时的加速度。
2.根据权利要求1所述的一种结构模型参数未知时动响应预测新方法,其特征在于:步骤3)进入全连接层,训练得到较好的CNN模型,其中:
将运算得到的数据代入到全连接层,设输入为x
Z
考虑的激活函数为带泄露修正线性单元(Leaky-RELU),
y
在动力响应预测时,通过最小化模型的预测值与理想的目标值之间的差值进行训练,利用均方误差作为目标函数,通过反向传播算法对权重进行优化,并考查了不同a
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
本发明提出的基于卷积神经网络的结构动响应预测方法不需知道结构的动力学模型参数,相较于传统方法,适用范围更广,抗噪声能力较好,特别是针对结构动力学模型参数很难确定或者本身就存在不确定性的问题,本发明具有较强的适用性,可以广泛应用于工程实际中结构中的动响应预测问题。
附图说明
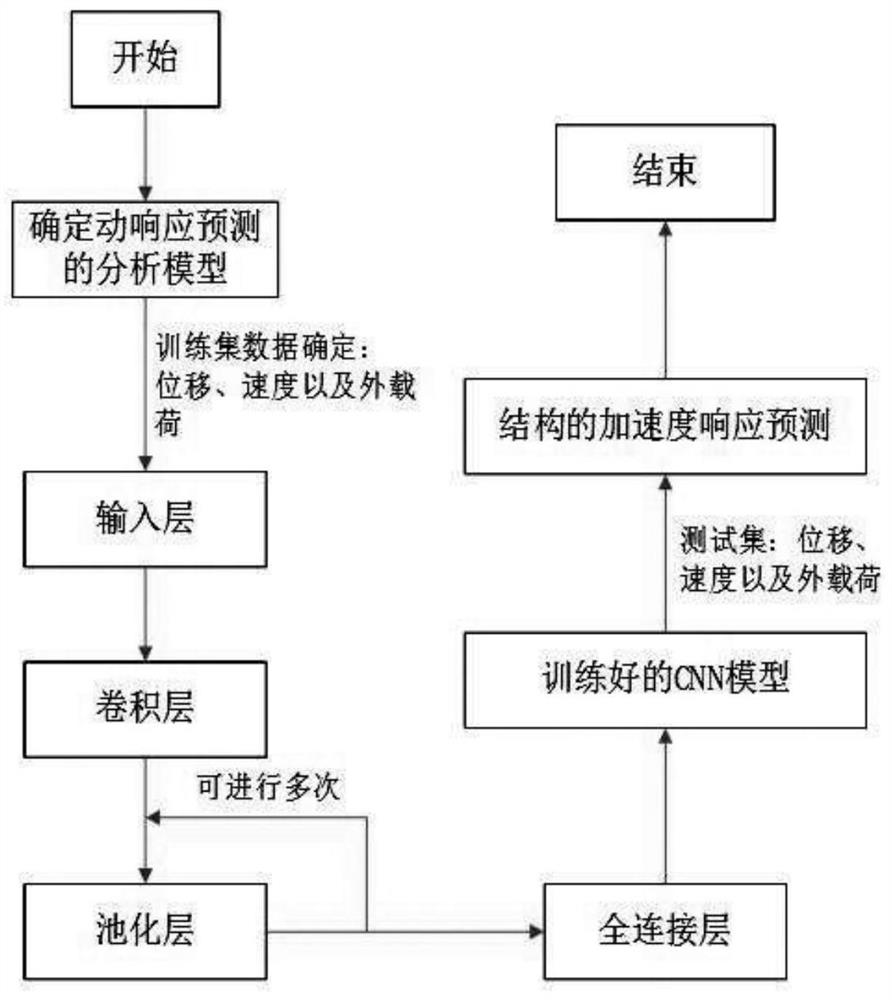
图1本发明方法的总体技术方案流程;
图2激活函数中a=0.01无噪声干扰时预测效果;
图3激活函数中a=0.05无噪声干扰时预测效果;
图4激活函数中a=0.5无噪声干扰时预测效果;;
图5激活函数中a=0.01存在10%噪声干扰时预测效果;
图6激活函数中a=0.05存在10%噪声干扰时预测效果;
图7激活函数中a=0.5存在10%噪声干扰时预测效果;
图8三自由度系统;
图9多自由度系统(MDOF)的一维CNN模型;
图10多自由度系统(MDOF)的二维CNN模型;
图11一维CNN不同自由度的RMS误差对比;
图12二维CNN不同自由度的RMS误差对比。
具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细描述:
本发明一种结构模型参数未知时动响应预测新方法,运用卷积神经网络算法对结构动响应进行预测。需要事先用动响应及外激励数据训练得到准确的卷积神经网络模型,再通过输入结构的位移,速度和激励,预测得到系统的加速度响应。该方法无需了解结构的动力学模型参数,对抗噪声能力较好,也适用于工程实际中响应的识别问题,并且可以根据需要预测出相应的加速度、速度或者位移响应信息。下面结合附图对本发明的技术方案做进一步的详细说明:
卷积神经网络的运用使得结构的动响应识别不需要知道结构的动力学参数。能用于各种类型结构的识别问题,具有良好的识别精度和抗噪声干扰能力。经过训练集的数据训练后,输入结构的位移,速度和激励,则可以预测出此时的加速度。
本发明方法首先通过训练集的训练,得到准确的卷积神经网络,然后根据这个卷积神经网络实现对结构加速度的预测。具体实施步骤如下:
步骤1:确定动响应预测的分析模型:
在基于卷积神经网络的结构动响应预测过程中,需要将结构的位移、速度和激励作为输入层的输入信号。还需要确定该卷积神经网络需要几个卷积层和池化层,包括卷积层中的卷积核的大小和维数,以及池化层中的池化视野和步长,本项研究中建立了两种CNN模型处理该MDOF系统的模型,分别建立了基于一维卷积运算和基于二维卷积运算的多自由度系统的CNN模型。
步骤2:对系统的输入进行卷积与池化。
用已经确定过的卷积核矩阵在输入矩阵上滑动并进行点积,即可视为卷积运算,运算结果的维度是卷积核的维度。然后进入池化层,使用选定的池化视野和步长来降低数据体的空间尺寸,本方法选择了最大池化。根据选择的卷积层和池化层个数,可依次代入到卷积层和池化层中进行运算。
步骤3:将处理得到的数据代入全连接层,训练得到较好的CNN模型:
将运算得到的数据代入到全连接层,设输入为x
Z
本发明中考虑的激活函数为带泄露修正线性单元(Leaky-RELU),。
通过最小化模型的预测值与理想的目标值之间的差值进行训练,通过反向传播算法对权重进行优化,并考查了不同a
步骤4:预测得到结构的动响应
使用不包含在训练集中的验证集数据校验得到的模型,后使用不包含在训练集、验证集中的测试集数据评估CNN模型的有效性。由此可将评估有效的模型用于动响应预测,输入结构的位移,速度和激励,预测得到此时的加速度。
总体技术方案流程如图1所示。
为了验证激活函数对动载荷识别的效果,引入leaky-RELU函数,其函数值与梯度如下所示:
经过多种误差间的对比,发现leaky-RELU函数继承了RELU函数计算快速的优点。
以线性单自由度系统为例:
其中:
m=1kg,k=200N/m,c=3N·s/m
载荷为:
考查不同a对训练效果的影响,分别考虑a为0.01、0.05、0.5,当无噪声干扰时,预测结果如图2-图4所示。对应的均方根值误差为:0.02290、0.02185、0.01849。当存在10%的噪声干扰时,预测结果如图5-图7所示,对应的均方根值误差为:0.04954、0.05794、0.06256。由此可见当不存在噪声干扰时,a取时0.01-0.5时,效果差距不大;当存在噪声干扰时,a在0.01-0.5区间内,取值越小对应的均方根值越小,预测效果越好。
为了验证所提出的方法的有效性,引入了一个三自由度系统,见图8。其中k
利用Newmark方法根据激励求出结构的响应,包括位移、速度以及加速度。将十个噪声级别(即1%,2%,3%,5%,7%,10%,15%,20%,25%和30%)添加到信号,以研究CNN对噪声数据的鲁棒性。将数据按照7:3:1的比例分为训练集、验证集和测试集。下面分别建立一维卷积运算和二维卷积运算的三自由度系统的CNN模型,验证本方法的有效性。
算例一:基于一维卷积运算的MDOF系统的CNN模型
以三个自由度的激励、位移和速度作为输入参数,以三个自由度的加速度作为输出参数,即输入为一个1×9的向量,输出为一个1×3的向量。第一个卷积层的输入为1×9×1,输出为1×9×3,后跟池化层,输出为1×9×3,第二个卷积层输出为1×9×8,池化层不改变输入值的大小,在第三和四两个池化层采用核为2,步长为2进行池化,使得数据变为1×3×8,在第四个池化层后直接连接具有1024个节点的全连接层,后连接参数为0.2的Dropout层,最后连接输出为3的输出层。模型方案如图9所示,各自由度的RMS误差对比结果如图10所示。
算例二:基于二维卷积运算的MDOF系统的CNN模型
输入与输出为10×9的向量和1×30的向量,其中10×9的向量和1×30的向量分别由时序上前后相关联的10组数据重新排列组合而成。第一个卷积层的输入为10×9×1,输出为10×9×3,后跟池化层,输出为10×9×3,第二个卷积层输出为10×9×8,池化层不改变输入值的大小,在第三和四两个池化层采用核为2,步长为2进行池化,使得数据变为3×3×8,在第四个池化层后直接连接具有1024个节点的全连接层,后连接参数为0.2的Dropout层,最后连接输出为30的输出层。模型方案如图11所示,各自由度的均方根(RMS)误差对比结果如图12所示。
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
本技术领域技术人员可以理解的是,本发明可以涉及用于执行本申请中所述操作中的一项或多项操作的设备。所述设备可以为所需的目的而专门设计和制造,或者也可以包括通用计算机中的已知设备,所述通用计算机有存储在其内的程序选择性地激活或重构。这样的计算机程序可以被存储在设备(例如,计算机)可读介质中或者存储在适于存储电子指令并分别耦联到总线的任何类型的介质中,所述计算机可读介质包括但不限于任何类型的盘(包括软盘、硬盘、光盘、CD-ROM、和磁光盘)、随机存储器(RAM)、只读存储器(ROM)、电可编程ROM、电可擦ROM(EPROM)、电可擦除可编程ROM(EEPROM)、闪存、磁性卡片或光线卡片。可读介质包括用于以由设备(例如,计算机)可读的形式存储或传输信息的任何机构。例如,可读介质包括随机存储器(RAM)、只读存储器(ROM)、磁盘存储介质、光学存储介质、闪存装置、以电的、光的、声的或其他的形式传播的信号(例如载波、红外信号、数字信号)等。
本技术领域技术人员可以理解的是,可以用计算机程序指令来实现这些结构图和/或框图和/或流图中的每个框以及这些结构图和/或框图和/或流图中的框的组合。可以将这些计算机程序指令提供给通用计算机、专业计算机或其他可编程数据处理方法的处理器来生成机器,从而通过计算机或其他可编程数据处理方法的处理器来执行的指令创建了用于实现结构图和/或框图和/或流图的框或多个框中指定的方法。
以上所述,仅是本发明的较佳实施例之一,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。