一种智能两栖双体深海工程勘探潜航器
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及潜航器技术领域,特别涉及一种智能两栖双体深海工程勘探潜航器。
背景技术
潜航器是靠遥控或自动控制在水下航行的器具,主要进行水下探测、救生、排除水雷等高危险性水下作业的智能化系统,可用于近海石油调查、通信线路检查、军事应用以及深海探测打捞。潜航器一般为单壳体设计,由骨架及浮体、推进系统、航行控制系统以及探测系统等部分组成,一些无人潜航器上还配有机械手等机构。
目前潜航器的功能有待扩展,深海勘探工程作业的稳定性及智能和安全性有待提升。
发明内容
本申请提供了一种智能两栖双体深海工程勘探潜航器,解决或部分解决了现有技术中勘探潜航器功能有待扩展,深海勘探工程作业的稳定性及智能和安全性有待提升的技术问题;实现了勘探潜航器安全可靠的无人化智能控制。
本申请所提供的一种智能两栖双体深海工程勘探潜航器,包括:双体艇壳总成、双螺旋桨推进器总成、尾翼舵总成、升降调节电动发电机总成、压水循环泵总成、动力能量总成、智能双核电控传感总成、轮式行走总成、机械手总成、收纳网箱总成,其中,
所述双体艇壳总成包括:两个对称设置的流线型抗压壳体、中段贯通横梁、尾舵贯通横梁、伸缩驱动电机,所述流线型抗压壳体包括:前舱、中控舱、轮机舱、双哑铃式储水罐、压水隔舱、独立悬挂式电动车轮舱,所述前舱、中控舱及轮机舱由潜航器的艇首向艇尾依次布置;所述压水隔舱设置在所述前舱、中控舱及轮机舱的底部;所述双哑铃式储水罐设置在所述压水隔舱内;所述独立悬挂式电动车轮舱设置在所述前舱及轮机舱的底部,用于安装所述轮式行走总成;两个所述流线型抗压壳体通过所述中段贯通横梁、尾舵贯通横梁及机械手总成的回转连接臂并排连接;所述伸缩驱动电机驱动所述中段贯通横梁、尾舵贯通横梁及所述回转连接臂的伸长或缩短,使两个所述流线型抗压壳体分开或靠拢;所述双哑铃式储水罐与所述压水循环泵总成连接,以调节所述潜航器的首尾重心、侧身重心及姿态;
所述双螺旋桨推进器总成用于推进所述潜航器;
所述尾翼舵总成用于所述潜航器的升降调节;
所述升降调节电动发电机总成与所述尾翼舵总成协调进行所述潜航器的沉降推进,同时,通过电控转换实现海流发电对所述动力能量总成进行充电;
所述压水循环泵总成用于调节所述潜航器整体的上升、下潜及沉浮平衡;
所述动力能量总成用于提供电力;
所述智能双核电控传感总成用于提供机电控制、传感控制及外设控制;
所述轮式行走总成用于所述潜航器的陆地行走;
所述机械手总成用于执行外部抓取动作;
所述收纳网箱总成与所述机械手总成配合,用于收纳所述机械手总成抓取的物体。
作为优选,所述双螺旋桨推进器总成包括:两套分别设置在所述流线型抗压壳体上的推进螺旋桨、传动轴、联轴器、发电离合变速箱、动力机、发电机及转换控制器,
所述推进螺旋桨通过所述传动轴、所述联轴器与所述发电离合变速箱采用机械配合连接到所述动力机;
所述发电机与所述转换控制器电气连接;
其中,当所述动力机不工作时,所述推进螺旋桨的桨叶自动伸展,所述转换控制器控制所述发电机转入发电状态。
作为优选,所述尾翼舵总成包括:驱动电机、回转齿轮、尾舵翼及驱动控制器,所述驱动控制器与所述驱动电机电性连接;所述驱动电机输出端连接所述回转齿轮;所述尾舵翼通过固定轴与所述回转齿轮连接;所述驱动电机工作,带动所述回转齿轮动作,进而带动所述尾舵翼上下扑水调控动作。
作为优选,所述升降调节电动发电机总成包括:电动发电转换控制器、螺旋桨叶及电动发电机,所述螺旋桨叶垂直固定在所述机械手总成的回转连接臂上;所述电动发电机的输入端与所述螺旋桨叶的转轴固定连接,所述电动发电机与所述电动发电转换控制器电性连接;
其中,当所述机械手总成的回转连接臂垂直向上时,所述电动发电机由所述电动发电转换控制器转换成电动机工作模式,所述电动发电机驱动所述螺旋桨叶转动使所述潜航器倒车;当所述电动发电机由所述电动发电转换控制器转换成发电机工作模式时,所述螺旋桨叶在所述潜航器前进产生的水流作用下旋转,继而使所述电动发电机发电;
当所述机械手总成的回转连接臂处于水平向前的状态时,所述电动发电机由所述电动发电转换控制器转换成电动机工作模式,所述电动发电机驱动所述螺旋桨叶转动使所述潜航器做上浮或前仰上浮动作;当所述电动发电机由所述电动发电转换控制器转换成发电机工作模式时,所述螺旋桨叶在所述潜航器前进产生的水流作用下旋转,继而使所述电动发电机发电;
当所述机械手总成的回转连接臂垂直向下时,所述电动发电机由所述电动发电转换控制器转换成电动机工作模式,所述电动发电机驱动所述螺旋桨叶转动使所述潜航器前进;当所述电动发电机由所述电动发电转换控制器转换成发电机工作模式时,所述螺旋桨叶在所述潜航器前进产生的水流作用下旋转,继而使所述电动发电机发电。
作为优选,所述压水循环泵总成包括:外双向排吸压水泵、内双向循环调节泵、外双控总阀门及连通水管,所述内双向循环调节泵与所述双哑铃式储水罐通过连通水管连接,所述外双向排吸压水泵并接在所述内双向循环调节泵的管路上。
作为优选,所述动力能量总成设置有动力能量单元,所述动力能量单元包括储油罐和/或动力电池,所述储油罐连接所述双螺旋桨推进器总成的动力机;所述动力电池通过所述能量管理器、配电器及输送线路与所述双螺旋桨推进器总成的电动机连接。
作为优选,所述智能双核电控传感总成包括:双核中控器、螺旋浆驱动器、尾舵驱动器、电源管理器、压水调节泵驱动器、传感探测器及机器手主控器,所述双核中控器分别与所述螺旋浆驱动器、尾舵驱动器、电源管理器、压水调节泵驱动器、传感探测器及所述机器手主控器电性连接。
作为优选,所述轮式行走总成8包括:四个独立悬挂电动车轮80、折叠伸缩机构、驱动控制器及水密门机构,所述独立悬挂电动车轮设置在所述独立悬挂式电动车轮舱内,所述独立悬挂电动车轮通过所述折叠伸缩机构连接所述流线型抗压壳体;所述驱动控制器与所述折叠伸缩机构及所述水密门机构电性连接;所述水密门机构在所述驱动控制器的控制下配合所述折叠伸缩机构进行开合动作。
作为优选,所述机械手总成包括:回转连接臂、摇臂机、绞盘机、抓取腕总成、内置牵引机构、回转电机,抓取爪组件、张力弹簧组件、传感控制器、物探传感器组件、收发天线、钢缆,所述摇臂机带动所述回转连接臂进行270°可控旋转;所述绞盘机及所述钢缆驱动所述抓取腕及所述抓取爪组件动作,所述抓取腕由正反两个盘轮构成,所述抓取爪组件设置在所述盘轮上,通过所述张力弹簧组件保持开放状态;所述回转电机通过所述内置牵引机构连接所述抓取爪组件,使所述抓取爪组件进行360°回转;所述抓取爪组件上设置有所述传感控制器、所述物探传感器组件及所述收发天线。
作为优选,所述收纳网箱总成包括:承载网兜、固定扣及索缆,所述承载网兜通过所述索缆连接在所述固定扣上,所述固定扣设置在两个所述流线型抗压壳体之间。
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
本申请的智能两栖双体深海工程勘探潜航器采用双艇壳并列设计,通过贯通横梁实现并联,并且实现了并联伸缩调节功能,双螺旋浆推进或三螺旋桨推进,提高作业灵活性;双艇壳中间设有机械手总成、收纳网箱总成,可在无需人工潜水的深海进行智能化机械作业和采集作业。升降调节电动发电机总成与尾翼舵总成协调进行潜航器的沉降推进,实现螺旋桨推进与螺旋桨发电控制转换功能,可利用海流实现发电自充电功能,或者用一半动力作为螺旋桨推进,产生的海流来驱动螺旋桨从推进转换到发电状态工作,实现自我发电和充电而不需要上浮充电。通过内置的压水循环泵总成与双哑铃式储水罐配合,实现潜航器做水平潜行,侧身潜行等多种便于深海勘探和打捞的航行姿态。机械手总成为外设智能化工具,可实现海底管道巡检,海底工程施工,海底救援打捞,通过机械手总成还可实现浅滩自行上岸等特殊功能,上岸后可以通过轮式行走总成实现陆地行走。通过智能双核电控传感总成实现潜航器从无人到有人化的智能控制,提高了有人无人化智能控制的可靠性和安全性。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
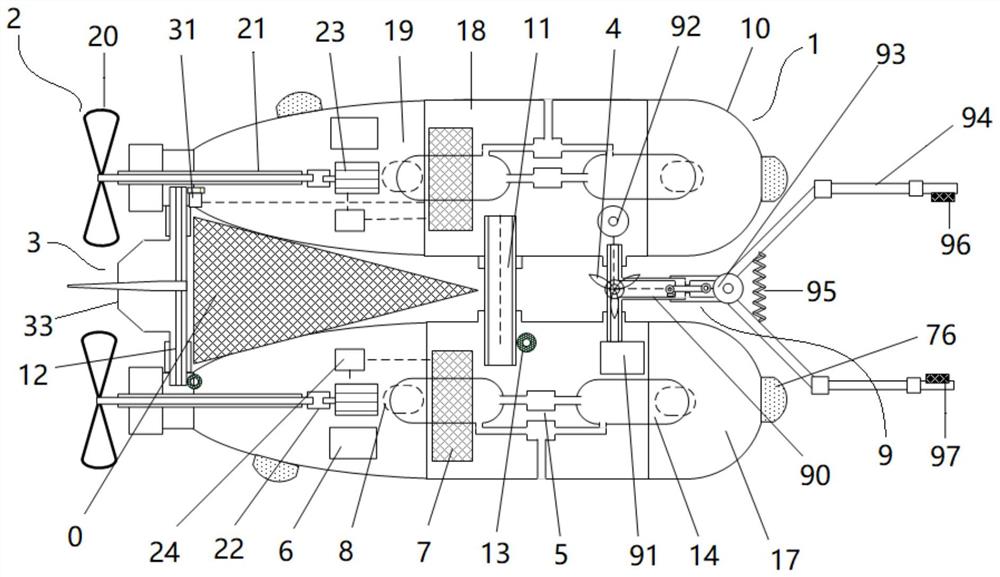
图1为本申请实施例提供的智能两栖双体深海工程勘探潜航器的结构俯视图;
图2为本申请实施例提供的智能两栖双体深海工程勘探潜航器的结构主视图;
图3为本申请实施例提供的智能两栖双体深海工程勘探潜航器的结构右视图;
图4为本申请实施例提供的智能两栖双体深海工程勘探潜航器的截面示意图;
图5为本申请实施例提供的智能两栖双体深海工程勘探潜航器的结构左视图;
图6为本申请实施例提供的智能两栖双体深海工程勘探潜航器中智能双核电控传感总成的结构框图。
(附图中各标号代表的部件依次为:1双体艇壳总成、10流线型抗压壳体、11中段贯通横梁、12尾舵贯通横梁、13伸缩驱动电机、14双哑铃式储水罐、15压水隔舱、16独立悬挂式电动车轮舱、17前舱、18中控舱、19轮机舱、2双螺旋桨推进器总成、20推进螺旋桨、21传动轴、22联轴器、23发电离合变速箱、24动力机、3尾翼舵总成、31驱动电机、32回转齿轮、33尾舵翼、4升降调节电动发电机总成、41螺旋桨叶、5压水循环泵总成、6动力能量总成、7智能双核电控传感总成、70双核中控器、71螺旋浆驱动器、73尾舵驱动器、74电源管理器、75压水调节泵驱动器、75C升降泵、76传感探测器、76A陀螺传感器、76B定位传感器、76C平衡传感器、76D速度传感器、76E声呐传感器、76F深度传感器、76G光电传感器、76H压力传感器、77机器手主控器、78A绞盘机驱动器、78B摇臂机驱动器、79爪手机构、8轮式行走总成、9机械手总成、90回转连接臂、91摇臂机、92绞盘机、93抓取腕总成、93A内置牵引机构、93B回转电机、94抓取爪组件、95张力弹簧组件、96传感控制器、97物探传感器组件、0收纳网箱总成、00承载网兜、01固定扣、02索缆)
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
参见附图1和2,本申请所提供的智能两栖双体深海工程勘探潜航器,包括:双体艇壳总成1,双螺旋桨推进器总成2,尾翼舵总成3,升降调节电动发电机总成4,压水循环泵总成5,动力能量总成6,智能双核电控传感总成7,轮式行走总成8,机械手总成9,收纳网箱总成0构成;双艇壳总成1构成连体结构,分别由双螺旋桨推进器总成2推进,尾翼舵总成3设置在双艇壳总成1尾部连接横梁上实现升降调节,升降调节电动发电机总成4设置在双艇壳总成1艇身前部的机械手总成9部位,与尾翼舵总成3协调作为艇身沉降推进,同时通过电控转换实现海流发电对动力能量总成6进行充电。压水循环泵总成5设置在双艇壳总成1的两个艇身底部,用于调节艇身的整体上升与下潜及沉浮平衡,艇内设有动力能量总成6为双螺旋桨推进器总成2、尾翼舵总成3、升降调节电动发电机总成4、智能双核电控传感总成7、轮式行走总成8、机械手总成9提供电力,智能双核电控总成7为全艇提供机电控制,传感控制及外设控制,机械手总成9设置在艇身前部的位置,通过回转连接臂与两个艇身水密封连接,用于执行外部抓取动作,收纳网箱总成0设置在双艇壳总成1的后端两艇身之间,与机械手总成9配合作为外置收纳网箱使用;改变双艇壳大小可从无人潜航环境下的应用扩展到有人驾驶的智能化潜航、勘探巡检及采集收纳等使用场景。
参见附图4,双体艇壳总成1主要由相同的流线型抗压壳体10、中段贯通横梁11、尾舵贯通横梁12、伸缩驱动电机13、双哑铃式储水罐14、压水隔舱15、独立悬挂式电动车轮舱16、前舱17、中控舱18、轮机舱19构成。双体艇壳总成1的两个相同的流线型抗压壳体10通过中段贯通横梁11、尾舵贯通横梁12及机械手总成9的回转连接臂90并排连接,通过伸缩驱动电机13驱动实现横向伸展和收缩,同时通过设置的抗压伸缩密封圈密封并实现同步伸缩,用于调整艇身占地宽度,前舱17、中控舱18、轮机舱19依次由艇首向艇尾布置,双哑铃式储水罐14设置在前舱17、中控舱18、轮机舱19的下层的压水隔舱15内,即艇底重心位置,独立悬挂式电动车轮舱16设置在压水隔舱15与艇壳之间得承载位置,用于安装轮式行走总成8支撑整个双体艇壳总成1可陆上行走;其中流线型抗压双壳体11横截面呈柳叶形,高宽比例大于等于2:1,中段连接贯通横梁11可以是扁平流线型,基于艇身中部部位上下两根并列布局,以提高整体强度及提供通道;双哑铃式储水罐14通过与压水循环泵总成5连接,具有首尾重心调节、侧身重心调节姿态控制功能。
双螺旋桨推进器总成2主要由两套推进螺旋桨20、传动轴21、联轴器22、发电离合变速箱23、动力机24、发电机、转换控制器、驱动控制器构成,推进螺旋桨20与传动轴21与联轴器22与发电离合变速箱23采用机械配合连接到动力机24作为主动力实现推进功能,发电机与转换控制器构成电气连接来实现发电功能的转换,其中所述的推进螺旋桨20桨叶设有通过动力机24转速和惯性重力组合实现自动伸缩功能,当动力机24不工作时桨叶自动伸展,同时由转换控制器控制发电机转入发电状态。这样可以实现一个推进螺旋桨20作为电动工作状态时,另一个推进螺旋桨则可作为发电状态,对动力电池进行补充充电。
参见附图5,尾翼舵总成3主要由驱动电机31、回转齿轮32、尾舵翼33、驱动控制器构成,尾舵贯通横梁12设置在于双体艇壳总成1尾椎的双螺旋桨推进器总成2的艇身位置,尾翼舵总成3还设置有伸缩驱动机构和伸缩密封圈,跟随尾舵贯通横梁12实现伸长和缩短,同时保证结构密封;由内置驱动控制器34控制内置驱动电机31回转齿轮32带动尾舵翼33做上下扑水调控动作。
潜浮调节电动发电机总成4主要由电动发电转换控制器、螺旋桨叶41、电动发电机构成,潜浮调节电动发电机总成4寄生在机械手总成9的回转连接臂90中间部位,并与之成90度,利用调节机械臂总成9来实现调节。工作于三种状态:螺旋桨推进状态、发电机发电状态、停止状态;当机械手总成9的回转连接臂90垂直向上时,螺旋桨叶41工作于电动状态时,电动发电机由电动发电转换控制器控制转换成电动机工作模式使潜艇倒车,当转换成发电状态时,可以利用推进螺旋桨20前进的水流发电,回收电能充电。当机械手总成9的回转连接臂90处于水平向前的状态时,螺旋桨叶41工作于电动状态,电动发电机由电动发电转换控制器控制转换成电动机工作模式,可使潜艇做上浮或前仰上浮动作,当转换成发电状态时,可以利用推进螺旋桨20前进的水流发电,回收电能充电。当机械手总成9的回转连接臂90垂直向下时,螺旋桨叶41工作于电动状态时,电动发电机由电动发电转换控制器控制转换成电动机工作模式,可使潜艇前进,当转换成发电状态时,可以利用推进螺旋桨20前进的水流发电,回收电能充电。
压水循环泵总成5主要由外双向排吸压水泵、内双向循环调节泵、外双控总阀门、连通水管与双哑铃式储水罐14配合构成,外双向排吸压水泵分别并接在内双向循环调节泵的两个管路上,再分别与双哑铃式储水罐14构成两套整体,分别在每个艇内设置一套。
动力能量总成6主要由两组动力能量单元、能量管理器、配电器、输送线路构成,其中动力能量单元可以是储油罐、可以是动力电池,也可以是储油罐与动力电池的组合构成;动力能量总成6在单独采用电动机驱动时为动力电池,当采用动力机时为储油罐,当动力机、电动机混合使用时则动力能量总成6包含了储油罐及动力电池共同构成。
参见附图6,智能双核电控传感总成主要由双核中控器70,螺旋浆驱动器71,尾舵驱动器73,电源管理器74,压水调节泵驱动器75、升降泵75C、传感探测器76、机器手主控器77,绞盘机驱动器78A、摇臂机驱动器78B、爪手机构79构成,双核中控器通过FPGA阵列分别控制螺旋浆驱动器71、电源管理器74、压水调节泵驱动器75形成双路互为独立控制,具有在双路互为独立控制过程中其中一路出现故障时另一路接管独立控制权继续工作的功能。而尾舵驱动器73、升降泵75C、传感探测器76、机器手主控器77,绞盘机驱动器78A,摇臂机驱动器78B,爪手机构79则通过双核中控器70及FPGA阵列共同控制工作;其中传感探测器76包括:陀螺传感器76A、定位传感器76B、平衡传感器76C、速度传感器76D、声呐传感器76E、深度传感器76F、光电传感器76G、压力传感器76H等构成。
轮式行走总成8主要由四个独立悬挂电动车轮、折叠伸缩机构、驱动控制器、水密门机构构成;独立悬挂电动车轮通过折叠伸缩机构构成机械连接支撑起整个艇身,由驱动控制器进行驱动与控制,水密门机构在驱动控制器的控制下配合折叠伸缩机构实现开合动作,需要落地行走时打开,放出独立悬挂电动车轮,潜水时独立悬挂电动车轮折叠收回到独立悬挂式电动车轮舱16内。
参见附图3,机械手总成9主要由回转连接臂90、摇臂机91、绞盘机92、抓取腕总成93、内置牵引机构93A、回转电机93B,抓取爪组件94、张力弹簧组件95、传感控制器96、物探传感器组件97、收发天线、钢缆构成。回转连接臂90与双体艇壳总成1的前段构成水密性贯通活动链接,通过摇臂机91实现270度可控旋转,同时通过绞盘机92、钢缆驱动抓取腕93及抓取爪组件94动作,抓取腕93由正反两个盘轮93A、93B构成,上安装有抓取爪组件94并与回转连接臂90通过内置牵引机构及回转电机实现360度回转,抓取爪组件94上设置有智能控制器96、物探传感器组件97、收发天线的功能及接口,并通过张力弹簧组件95保持开放状态,由绞盘机92带动钢缆实现抓取动作,物探传感器组件97感知到的信息通过电缆回传到传感控制器96及机器手主控器77进行数据处理或输出指令。最后由抓取爪组件94执行相应的操作,当涉及到整体动作时还将通过智能双核电控传感总成7进行接管控制,在智能双核电控传感总成7进行接管控制时,机械手总成9还可以实现自动登岸功能。
收纳网箱总成0主要由承载网兜00、固定扣01、索缆02构成,承载网兜00通过索缆02系留在固定扣01上,固定扣01设置在两个艇身的鱼尾段与尾舵贯通横梁12之间,实现外挂式收纳功能。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能两栖双体深海工程勘探潜航器
- 一种全潜式深海智能养殖网箱结构