一种服务机器人精确抓取装置
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及服务机器人技术领域,具体涉及一种服务机器人精确抓取装置。
背景技术
随着科学技术以及计算机水平的不断发展,智能服务机器人的功能越发多样,在工业生产和日常生活中都发挥着重要作用,其中抓取操作是服务机器人最常用的服务方式,然而在服务机器人进行抓取操作时,必须先获取目标物体的精准位置,然后再移动抓取装置到精确位置,才能进行抓取动作完成抓取任务,而现有的抓取装置普遍采用盲抓取的方式,这种抓取方式对硬件和软件的精度要求很高,现实中在精度上难以满足要求,此外,现有的抓取装置结构复杂,难以提高抓取准确性,使得服务机器人的抓取装置工作效率低。
发明内容
针对现有技术中存在的技术问题,本发明的目的是:提供一种服务机器人精确抓取装置,通过该抓取装置可实现服务机器人对目标物体的精确抓取,提高抓取物体的成功率及可靠性。
为了达到上述目的,本发明采用如下技术方案:
一种服务机器人精确抓取装置,包括连接柱,连接柱的一端连接有夹具主体,夹具主体上滑动连接有两个齿条,两个齿条相对设置,连接柱内安装有电机,电机的输出轴上连接有齿轮,齿轮位于两个齿条之间,两个齿条分别与齿轮啮合,两个齿条上均连接有夹指,两个夹指相对的面上设有第一红外传感器,夹具主体的前端面上设有第二红外传感器,连接柱的侧壁上连接有相机支座,相机支座上安装有3D视觉相机。
进一步的,连接柱的另一端连接有法兰盘,连接柱通过法兰盘固定在服务机器人的机械臂末端,电机、第一红外传感器、第二红外传感器和3D视觉相机均与服务机器人的控制系统连接。
进一步的,夹具主体上设有两个长条状卡槽,两个齿条分别卡在两个长条状卡槽中并可在卡槽中移动。
进一步的,两个夹指的中心线位于同一直线上。
进一步的,两个第一红外传感器分别倾斜安装在两个夹指相对的面上,两个第一红外传感器射出的红外线均朝向外侧并且两个红外线相交叉,两个第一红外传感的中心线位于同一直线上。
进一步的,两个夹指分别通过焊接固定在两个齿条上。
进一步的,两个夹指相对的面上均设有第一红外传感器安装孔,两个第一红外传感器分别固定安装在两个第一红外传感器安装孔中。
进一步的,夹具主体的前端面上设有第二红外传感器安装孔,第二红外传感器固定安装在第二红外传感器安装孔中。
总的说来,本发明具有如下优点:
一、本发明可实现服务机器人对目标物体的精确抓取,提高抓取物体的成功率及可靠性,推动服务机器人技术领域的发展。
二、本发明结构灵巧,通用性强,使用方便,工作性能稳定可靠。
附图说明
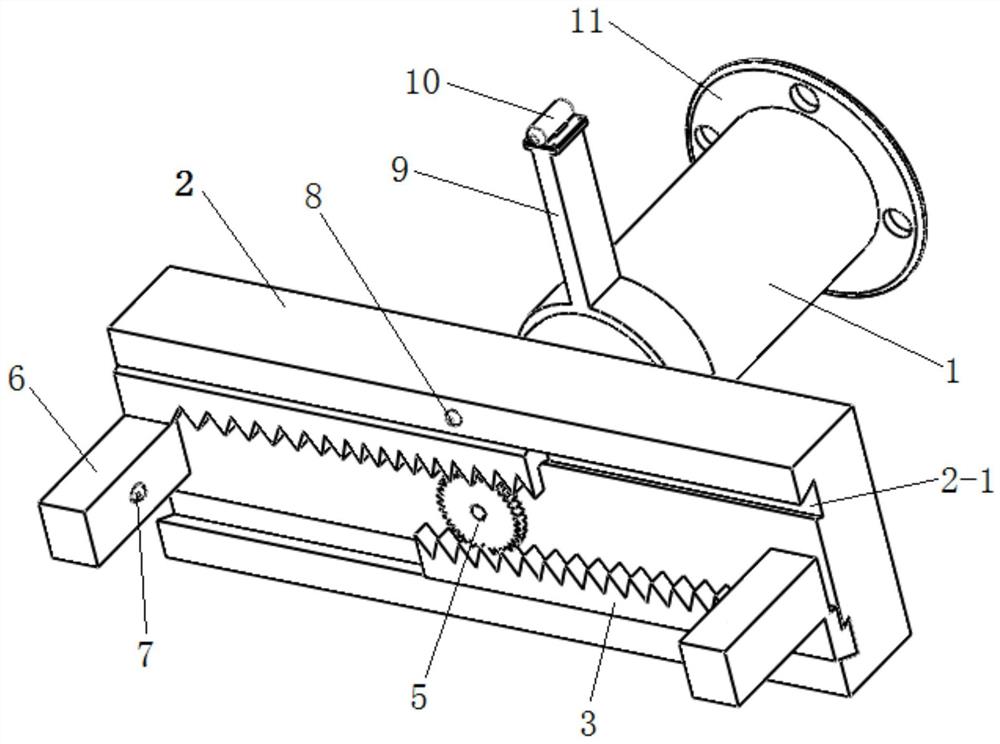
图1是本发明的结构示意图。
图2是本发明的连接柱的结构示意图。
图3是本发明的侧面透视图。
图4是本发明的俯视透视图。
其中:1为连接柱,2为夹具主体,2-1为个长条状卡槽,3为齿条,4为电机,5为齿轮,6为夹指,7为第一红外传感器,8为第二红外传感器,9为相机支座,10为3D视觉相机,11为法兰盘。
具体实施方式
下面将结合附图和具体实施方式来对本发明做进一步详细的说明。
如图1和图2所示,一种服务机器人精确抓取装置,包括连接柱,连接柱的一端连接有夹具主体,夹具主体上滑动连接有两个齿条,两个齿条相对设置,即夹具主体上设有两个长条状卡槽,两个齿条分别卡在两个长条状卡槽中并可在卡槽中移动;连接柱内安装有电机,电机的输出轴上连接有齿轮,齿轮位于两个齿条之间,两个齿条分别与齿轮啮合,两个齿条上均连接有夹指,在本实施方式中,两个夹指分别通过焊接固定在两个齿条上;两个夹指相对的面上设有第一红外传感器,即两个夹指相对的面上均设有第一红外传感器安装孔,两个第一红外传感器分别固定安装在两个第一红外传感器安装孔中;夹具主体的前端面上设有第二红外传感器,即夹具主体的前端面上设有第二红外传感器安装孔,第二红外传感器固定安装在第二红外传感器安装孔中;连接柱的侧壁上连接有相机支座,相机支座上安装有3D视觉相机。
电机驱动齿轮转动,齿轮转动带动两个齿条相对运动,进而带动两个夹指相对运动实现闭合或者张开,通过第一红外传感器、第二红外传感器和3D视觉相机提供目标物体的定位信息,使得两个夹指能够夹紧目标物体,实现对目标物体的精确抓取。
如图1所示,连接柱的另一端连接有法兰盘,连接柱通过法兰盘固定在服务机器人的机械臂末端,进而将整个抓取装置固定在服务机器人的机械臂末端,使得服务机器人的机械臂可带动整个抓取装置一起运动。电机、第一红外传感器、第二红外传感器和3D视觉相机均与服务机器人的控制系统连接,使得服务机器人可控制抓取装置的运动。
通过3D视觉相机可以获取目标物体的空间三维信息,作为机械臂带动抓取装置运动的粗定位;通过第二红外传感器可以探测目标物体与夹具主体前端面的距离,通过两个第一红外传感器可以探测到目标物体与两个夹指的距离,得到目标物体的精定位。
如图3和图4所示,两个夹指的中心线位于同一直线上,便于两个夹指更好地夹住物体,实现物体的抓取。两个第一红外传感器分别倾斜安装在两个夹指相对的面上,两个第一红外传感器射出的红外线均朝向外侧并且两个红外线相交叉,两个第一红外传感的中心线位于同一直线上。即两个第一红外传感器安装在同一水平线上,两个第一红外传感器射出的红外线相交叉,便于检测任意大小的目标物体,根据两个第一红外传感器探测到的目标物体的距离,可以判定目标物体与两个夹指之间的中心位置的偏移程度,便于机械臂带动抓取装置运动,使得两个第一红外传感器探测到的目标物体的距离相等,即使得目标物体位于两个夹指之间的中心位置处。
本发明的工作原理如下:
将本发明通过法兰盘固定安装在服务机器人的机械臂末端,与服务机器人的机械臂配合使用,主要通过粗抓取和精抓取两个步骤,来实现目标物体的抓取。首先通过3D视觉相机获取目标物体的空间三维信息,然后3D视觉相机将目标物体的空间三维信息传输给服务机器人的控制系统,作为机械臂带动抓取装置运动的粗抓取定位,然后机械臂带动抓取装置运动到目标物体所在的区域范围内,然后通过第二红外传感器探测目标物体与夹具主体前端面的距离,通过两个第一红外传感器探测到目标物体与两个夹指的距离,得到目标物体的精抓取定位,并判定目标物体与两个夹指之间的中心位置的偏移程度,第二红外传感器和两个第一红外传感器均会将探测到的距离信息传输给服务机器人的控制系统,作为机械臂带动抓取装置运动的精抓取定位,然后机械臂带动抓取装置运动到目标物体位置,即使得目标物体位于两个夹指之间的中心位置处,然后控制电机转动,电机驱动齿轮转动,齿轮转动带动两个齿条相对运动,进而带动两个夹指相对运动闭合夹紧目标物体,实现对目标物体的精确抓取。
总的说来,本发明可实现服务机器人对目标物体的精确抓取,提高抓取物体的成功率及可靠性,推动服务机器人技术领域的发展。本发明结构灵巧,通用性强,使用方便,工作性能稳定可靠。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种服务机器人精确抓取装置
- 一种利用光电实现精确定位的机械手抓取装置