可穿戴的手术用机械臂
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及一种可穿戴的手术用机械臂,更为详细地,涉及一种可在手术者的手臂上固定机械臂的状态下,利用通过手术者的操作控制的手术器械进行手术的可穿戴的手术用机械臂。
背景技术
在医学上手术是指通过使用手术工具对皮肤、黏膜或其他组织进行切割、撕裂或加以操作来治疗疾病的过程。尤其,对于切开手术部位的皮肤,治疗、整形或去除其内部的器官等的开腹手术及腹腔镜手术等来说,因其具有出血、副作用、患者的痛苦、疤痕及手术精度等问题,最近使用机器人的手术作为替代方案备受关注。
以往的手术用机器人如美国直观外科手术操作公司(Intuitive Surgical)开发的达芬奇机器人(Da Vinci Surgical System)那样由主(master)机器人和从动(slave)机器人构成,所述主机器人通过医生操作生成并传输必要信号,所述从动机器人从主机器人接收信号后直接进行手术所需操作,通常从动机器人安装在手术室,主机器人安装在与手术室分离的操作室,并通过有线或无线方式连接主机器人和从动机器人进行远程手术。
但是,以往的手术用机器人存在如下的问题:即,体积非常大,安装需要相当大的空间,且因装置结构复杂,在制造、安装及熟练过程中需要花费大量时间和费用。尤其,即使是简单的手术,当使用以往的手术用机器人时,存在因所需的时间和费用,机器人手术反而成为低效方式的问题。
此外,在手术中需要使用其他手术器械时,使用如下的方法等:即,将当前使用的手术用机器人的机械臂移位,并由手术辅助者更换手术器械后重新移动到原来位置。但是,在此情况下,需要将机械臂移动到能够使手术辅助者更换手术器械的空间,因此可能会产生机械臂的不必要的移动线路。这在需要最短时间内完成手术的特性上,具有浪费不必要的时间的问题。此外,存在为了更换手术器械的简单作业,需要额外人力(手术室辅助护士一至二名、器械护士一名)的问题。
此外,在利用机器人进行手术的过程中,当患者发生意想不到的紧急情况时,在与手术室分离的远程利用主机器人进行手术的医生为了直接参与手术需要准备时间,因此手术时间只能被延迟,由此存在无法立即应对紧急情况的问题。
发明内容
因此,本发明是为了解决如上所述的以往问题而提出的,其目的是提供一种可穿戴的手术用机械臂,该可穿戴的手术用机械臂在手术者的手臂上固定机械臂的状态下,通过由手术者的操作控制的手术器械进行手术,因此即使发生意想不到的紧急情况,也能使手术者立即采取应对措施。
此外,本发明的目的是提供一种可穿戴的手术用机械臂,该可穿戴的手术用机械臂在安装于手术者手臂的基座上设置有安装有多个手术器械的移动部,且根据由手术者输入的信号实现手术器械的更换,由此不仅能够缩短手术时间,而且无需用于更换手术器械的额外的人力。
此外,本发明的目的是提供一种可穿戴的手术用机械臂,在该可穿戴的手术用机械臂中,安装在手术者手臂的基座通过多关节支撑臂被支撑在结构体上,因此能够防止因机械臂的自重导致的手术者手臂疲劳度的增加。
上述目的通过本发明的可穿戴的手术用机械臂来实现,该可穿戴的手术用机械臂包括:基座,能够与手术者的手臂一起移动;移动部,形成有用于安装手术器械的多个收容槽,所述移动部以使多个收容槽中的一个收容槽能够位于第一位置的方式能够移动地安装于所述基座;轴,以能够进行前进和后退的方式配置于所述移动部的后方,并且能够选择性地贯穿位于所述第一位置的收容槽;第一驱动部,用于使所述移动部进行移动,以使在安装于所述移动部的多个收容槽中的手术器械中被选择的一个手术器械移动到第一位置;第二驱动部,用于使所述轴进行移动,以使位于所述第一位置的手术器械移动到位于第一位置的前方的第二位置;及第三驱动部,用于向移动到所述第二位置的手术器械提供动力。
在此,优选所述移动部能够旋转地配置在所述基座上。
此外,优选所述第三驱动部设置在轴上。
此外,优选在所述轴的前端设置有能够传递从所述第三驱动部提供的动力的驱动轮,在所述手术器械的后端设置有从动轮,所述从动轮设置在与所述驱动轮对应的位置且与驱动轮相啮合。
此外,优选在所述基座上设置有能够使手术者输入控制信号的输入部。
此外,优选所述输入部包括:第一输入部,能够输入用于控制手术器械的操作的控制信号。
此外,优选所述输入部包括:第二输入部,能够输入用于控制第一驱动部及第二驱动部的驱动的控制信号。
此外,优选所述第二输入部包括:用于识别手术者的语音的语音输入部;和语音识别部,根据由所述语音输入部输入的语音来生成用于控制第一驱动部及第二驱动部的驱动的控制信号。
此外,优选进一步包括:多关节支撑臂,以能够使所述基座移动的状态支撑所述基座。
根据本发明,提供一种可穿戴的手术用机械臂,该可穿戴的手术用机械臂在手术者的手臂上固定机械臂的状态下,通过由手术者的操作控制的手术器械进行手术,因此即使发生意想不到的紧急情况,也能够使手术者立即采取应对措施。
此外,提供一种可穿戴的手术用机械臂,该可穿戴的手术用机械臂在安装于手术者手臂的基座上设置有安装有多个手术器械的移动部,且根据由手术者输入的信号实现手术器械的更换,由此不仅能够缩短手术时间,而且无需用于更换手术器械的额外的人力。
此外,提供一种可穿戴的手术用机械臂,在该可穿戴的手术用机械臂中,安装在手术者手臂的基座通过多关节支撑臂被支撑在结构体上,因此能够防止因机械臂的自重导致的手术者手臂疲劳度的增加。
附图说明
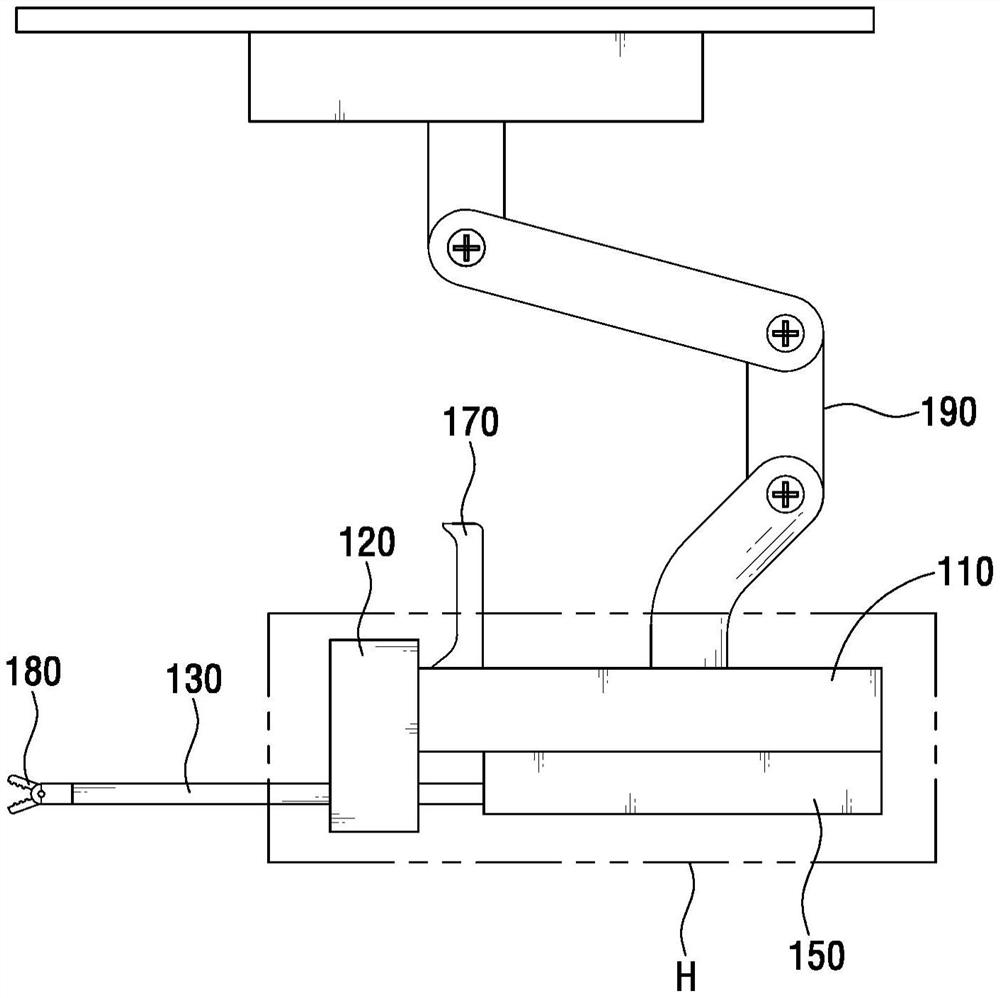
图1是根据本发明的可穿戴的手术用机械臂的示意结构图。
图2是根据本发明的可穿戴的手术用机械臂的立体图。
图3是表示根据本发明的可穿戴的手术用机械臂的移动部操作的作用图。
图4是表示根据本发明的可穿戴的手术用机械臂的轴操作的作用图。
图5是表示根据本发明的可穿戴的手术用机械臂的轴和手术器械的结合部位的立体图。
图6是表示根据本发明的可穿戴的手术用机械臂的移动部的变形例的图。
具体实施方式
在对本发明进行说明之前需要说明的是,在多个实施例中,对于具有相同结构的结构要素使用相同的附图标记,并在第一实施例中进行代表性的说明,在其他实施例中针对与第一实施例不同的结构进行说明。
下面,参照附图对根据本发明的第一实施例的可穿戴的手术用机械臂进行详细说明。
在附图中,图1是根据本发明的可穿戴的手术用机械臂的示意图,图2是根据本发明的可穿戴的手术用机械臂的立体图,图3是表示根据本发明的可穿戴的手术用机械臂的移动部操作的作用图,图4是表示根据本发明的可穿戴的手术用机械臂的轴操作的作用图,图5是表示根据本发明的可穿戴的手术用机械臂的轴和手术器械的结合部位的立体图,图6是表示根据本发明的可穿戴的手术用机械臂的移动部的变形例的图。
如上述图中所示,本发明的可穿戴的手术用机械臂包括基座110、移动部120、轴130、第一驱动部140、第二驱动部150、第三驱动部160、输入部170、手术器械180及多关节支撑臂190。
另外,为了防止复杂的机械结构从手术室内暴露到外部,优选具备用于收容所述的基座110、移动部120、第一驱动部140及第二驱动部150等的壳体H。
所述基座110安装于如外科医生等手术者的手臂上并与手臂一起移动,所述基座110可具备用于固定手臂的箍带(band)或带(belt)等,也可以套在胳膊的形式构成。
所述移动部120能够旋转地安装于所述基座110,可具有弧形剖面,且以旋转中心为基准在同一半径内形成有能够安装手术器械180的多个收容槽121,根据旋转位置可以使多个收容槽121中的一个收容槽121位于第一位置P1。另外,虽然图中未图示,但可以在所述移动部120上沿移动部120的移动方向设置有弧形轨道,在所述基座110上设置有与所述轨道结合的块,用于引导所述移动部12的旋转。另外,在本实施例中,以所述移动部120旋转的同时多个收容槽121中的一个收容槽121移动到第一位置P1为例进行了说明,但是如图6所示,也可以构造为能够使移动部120左右(或上下)移动的同时多个收容槽121中的一个收容槽121移动到第一位置P1的结构。
在所述移动部120的后方,所述轴130配置在与所述第一位置P1的收容槽121的同一轴线上,并且以能够进行轴向前进和后退的状态支撑在所述基座110。另外,虽然图中未图示,但在所述轴130的前端可设置有如握爪(gripper)那样能够选择性地对手术器械180后端进行固定或解除固定的结合机构。
所述第一驱动部140用于使所述移动部120进行旋转,以使安装于多个收容槽121的手术器械180中被选择的一个手术器械180能够移动到第一位置P1,所述第一驱动部140可包括设置于所述基座110的伺服马达(未图示)、固定于所述伺服马达驱动轴的小齿轮141及设置于所述移动部120并与所述小齿轮141啮合的弧形齿条142。另外,在本实施例中,以利用小齿轮141和齿条142使移动部120进行旋转为例进行了说明,但并不局限于此,可以采用可控制移动部120的旋转位置的多种形式的驱动装置和传动机构。
所述第二驱动部150用于使所述轴130进行轴向前进和后退,可由液压或空压气缸形式构成,所述轴130的移动方向设定为与所述移动部120的旋转中心轴并排的方向。当通过这种第二驱动部150的驱动使轴130前进时,配置在第一位置P1的收容槽121内的手术器械180脱离收容槽121并移动到位于第一位置P1前方的第二位置P2,当通过第二驱动部150的驱动使轴130后退时,配置在第二位置P2的手术器械180移动到第一位置P1并插入移动部120的收容槽121内。另外,在轴130的前进和后退过程中,为了所述轴130的前端和手术器械180后端的顺利结合或解除结合,所述第二驱动部150优选在第一位置P1暂停后再移动。
所述第三驱动部160用于与轴130的前端结合并向移动到第二位置P2的手术器械180提供动力,可包括伺服马达161和配置在所述轴130的前端部且通过从所述伺服马达161提供的动力旋转的驱动轮162,为了手术器械180的多种操作可设置有多个所述第三驱动部160。此外,虽然图中未图示,但在所述轴130和手术器械180的结合面可进一步设置有用于传递电源或信号而彼此电连接的端子。
所述输入部170设置于基座110上,能够使手术者输入用于操作或更换手术器械180的控制信号,所述输入部170包括能够生成用于驱动第三驱动部160的控制信号的第一输入部171和能够生成用于驱动第一驱动部140及第二驱动部150的控制信号的第二输入部172。
所述第一输入部171可包括能够根据手术者的操作而生成用于驱动第三驱动部160的控制信号的如操纵杆(joystick)、手套(glove)、扳机(trigger-gun)及手动控制器等多种输入装置中的一种以上。
所述第二输入部172可包括:能够识别手术者语音的语音输入部170;和语音识别部,能够根据由所述语音输入部170输入的语音来生成用于驱动所述第一驱动部140及第二驱动部150的控制信号。另外,在本实施例中,以通过手术者的语音来控制第一驱动部140及第二驱动部150为例进行了说明,但并不局限于此,也可以如所述第一输入部171那样,通过可由手术者直接操作的按钮或可以感测手术者操作的传感器等来生成控制信号。
所述手术器械180可包括主体部、设置于所述主体部前端的末端执行器、设置于所述主体部后端的从动轮181及设置于所述主体部的内部且用于连接从动轮181和末端执行器的传动机构,在所述主体部可设置有关节。这种手术器械180可根据末端执行器的形状分为钳子、电烧灼器械、缝合器械、超声波切割器械、清洗及排液器械等,并且按种类分别收容在所述移动部120的收容槽121中。所述从动轮181设置于所述手术器械180的后端部中与所述第三驱动部160的驱动轮162对应的位置,并被构造为与所述驱动轮162啮合而接收从第三驱动部160提供的动力。
所述多关节支撑臂190的一端部与所述基座110连接,另一端部与如墙壁、天花板或地板等的结构体连接,从而所述多关节支撑臂190支撑所述基座110,且可包括用于补偿因机械臂等的自重引起的重力的重力补偿机构。
下面,对上述可穿戴的手术用机械臂的第一实施例的操作进行说明。
基座110可固定在手术者的手臂并与手臂一起移动,并通过多关节支撑臂190被支撑在手术室内部的天花板、墙壁或地板等结构体。因此,手术者可在手术室内穿戴手术用机械臂的状态下,用手操作设置于基座110的第一输入部171来控制安装于机械臂的手术器械180进行手术,且可对第二输入部172输入语音来容易更换安装于机械臂的手术器械180。尤其,根据需要,手术者可以解除机械臂的穿戴后用手直接处置手术部位,因此在发生危险情况时可立即采取应对措施。
移动部120能够旋转地设置于所述基座110上,从而能够通过第一驱动部140旋转,在形成于移动部120的多个收容槽121中分别插入有不同种类的手术器械180。当手术者在手术过程中为了使用所希望的手术器械180而进行语音指示时,第二驱动部150后退驱动,使得轴130进行后退,从而使正在使用中的第二位置P2的手术器械180位于第一位置P1的收容槽121,然后第一驱动部140驱动,使得与相应语音对应的手术器械180的收容槽121移动到第一位置P1,之后第一驱动部140前进驱动,使得轴130进行前进,从而使配置在第一位置P1的手术器械180移动到第二位置P2。
如此,根据本发明,仅通过手术者的语音即可实现手术器械180的更换,因此不仅能够缩短手术时间,而且无需为更换手术器械180的额外的人力。此外,手术执刀医师可以预先组成预定手术所需的器械组合,且根据使用顺序依次配置在移动部120的收容槽121中,因此能够将在手术器械180的更换中所需的时间最小化。
关于如上所述那样配置在第二位置P2的手术器械180,随着手术者操作第一输入部171来控制第三驱动部160的驱动,控制末端执行器的操作,因此可利用手术器械180的末端执行器进行手术。
尤其,将所述第一输入部171以与腹腔镜手术器械的操作部类似的形式提供时,可在将本实施例的机械臂安装在手术者手臂的状态下,以与腹腔镜手术类似的形式进行手术,因此只要有腹腔镜手术经验的手术者就能直观地使用本实施例的机械臂。
本发明的权利范围并不限于上述实施例,在所附的权利要求书的范围内可由多种形式的实施例实现。在不脱离权利要求书所要求保护的本发明精神的范围内,本发明所属技术领域的技术人员均能变形的各种范围也属于本发明的权利要求书所记载的范围内。
- 可穿戴的手术用机械臂
- 一种手术机械臂的刚度调控方法及手术机械臂