一种驱动平台以及生产线
文献发布时间:2023-06-19 11:57:35
技术领域
本申请实施例涉及驱动装置技术领域。
背景技术
驱动装置是一种在驱动器的作用下驱动外部物体运动的装置。简单的驱动装置,如电机、电机和齿轮结合的结构、气缸、气缸和电机结合的结构等。驱动装置广泛的应用在生产线上,例如,半导体制造、激光切割、机床制造、医疗器械、自动化物流运输、PCB加工、印刷、检测一起、纺织与军工机械等。在这些生产线上往往需要用到多个驱动装置形成的驱动平台。
本申请的申请人在实现本申请的过程中,发现:目前,多个驱动装置是单独的设置,并对生产线的各个环节的设备进行驱动的,从而使得整个生产线的布局疏松,空间利用率不好。
发明内容
鉴于上述问题,本申请实施例提供了一种驱动平台以及生产线,克服了上述问题或者至少部分地解决了上述问题。
根据本申请实施例的一个方面,提供了一种驱动平台,包括:基座;第一驱动装置,设置于所述基座,用于驱动第一外部物体沿第一方向运动;第二驱动装置,设置于所述基座,用于驱动第二外部物体沿第二方向运动,其中,第二方向与所述第一方向相同或者相反;第三驱动装置,设置于所述基座,用于驱动第三外部物沿第三方向运动,其中,第三方向与第一方向具有第一角度;第四驱动装置,设置于所述基座,用于驱动第四外部物体沿第四方向运动,其中,第四方向与第三方向相同或者相反;所述基座具有沿第五方向相对设置的第一表面和第二表面,所述第三驱动装置设置于所述第一表面,所述第四驱动装置设置于所述第二表面。
在一种可选的方式中,所述第一表面设置第一立柱和第二立柱,所述第一立柱和第二立柱沿第三方向相对设置,所述第三驱动装置的一端设置于所述第一立柱,所述第三驱动装置的另一端设置于所述第二立柱。
在一种可选的方式中,所述基座设置开口,所述开口用于第五外部物体的设置。
在一种可选的方式中,所述第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置环绕所述开口设置。
在一种可选的方式中,所述第四方向和第三方向相反;所述第一驱动装置包括第一底座、第一平台、第一侧板、第一金属件、第一磁性元件、第一电机定子、第一电机动子和第一气浮组件;所述第一底座沿所述第一方向设置于所述基座;所述第一电机定子设置于所述基座;所述第一电机动子设置于所述第一平台,沿所述第一方向,所述第一电机动子相对于所述第一电机定子运动;所述第一平台包括连接的第一板和第二板,第二板远离第一板的一端与第一侧板连接,所述第一平台和第一侧板环绕所述第一底座设置;所述第一金属件设置于所述第一底座;所述第一磁性元件和第一金属件相对设置;所述第一磁性元件设置于所述第一板,用于沿着第三方向吸附所述第一金属件,和/或,所述第一磁性元件设置于所述第二板,用于沿着第五方向吸附所述第一金属件,和/或,所述第一磁性元件设置于所述第一侧板,用于沿着所述第四方向吸附所述第一金属件;所述第一气浮组件设置于所述第一底座,所述第一气浮组件用于沿着第三方向朝所述第一板输出作用力,和/或,所述第一气浮组件用于沿着第五方向朝所述第二板输出作用力,和/或,第一气浮组件用于沿着第四方向朝所述第一侧板输出作用力;所述第一平台用于所述第一外部物体设置。
在一种可选的方式中,所述第一磁性元件的数量为三个,一所述磁性元件设置于第一板,一所述磁性元件设置于第二板,一所述磁性元件设置于第一侧板;所述第一金属件的数量为三个,一所述第一金属件与一所述第一磁性元件相对设置。
在一种可选的方式中,所述第一气浮组件的数量为三个,一所述第一气浮组件的工作面对着所述第一板,一所述第一气浮组件的工作面对着所述第二板,一所述第一气浮组件的工作面对着所述第一侧板。
在一种可选的方式中,所述第一驱动装置还包括安装块;所述安装块设置于所述第一板,所述第一磁性元件与所述安装块可拆卸安装,所述安装块用于调整所述第一磁性元件与第一金属元件沿所述第三方向的距离;和/或,所述安装块设置于所述第二板,所述第一磁性元件与所述安装块可拆卸安装,所述安装块用于调整所述第一磁性元件与第一金属元件沿所述第五方向的距离;和/或,所述安装块设置于所述第一侧板,所述第一磁性元件与所述安装块可拆卸安装,所述安装块用于调整所述第一磁性元件与第一金属元件沿所述第三方向的距离。
在一种可选的方式中,所述第二方向和第一方向相反;所述第三驱动装置包括第三底座、第三平台、第三下板、第三上板、第三侧板、第三磁性元件、第三金属件、第三气浮组件和第三电机动定子组件;沿所述第三方向,所述第三底座的一端设置于所述第一立柱,所述第三底座的另一端设置于所述第二立柱;所述第三电机动定子组件的定子端设置于所述第三底座;所述第三电机动定子组件的动子端设置于所述第三侧板,沿所述第三方向,所述第三电机动定子组件的动子端相对于所述第三电机动定子组件的定子端运动;所述第三平台和第三侧板沿所述第一方向相对设置,所述第三下板和第三上板沿所述第五方向相对设置,所述第三平台、第三下板、第三侧板和第三上板依次连接,所述第三平台、第三下板、第三侧板和第三上板环绕所述第三底座设置;所述第三金属件设置于所述第三底座;所述第三磁性元件和第三金属件相对设置;所述第三磁性元件设置于所述第三平台,用于沿着第一方向吸附所述第三金属件,和/或,所述第三磁性元件设置于所述第三上板,用于沿着第五方向吸附所述第三金属件,和/或,所述第三磁性元件设置于所述第三侧板,用于沿着所述第二方向吸附所述第三金属件;所述第三气浮组件设置于所述第三底座,所述第三气浮组件用于沿着第一方向朝所述第三平台输出作用力,和/或,所述第三气浮组件用于沿着第五方向朝所述第三上板输出作用力,和/或,第三气浮组件用于沿着第二方向朝所述第三侧板输出作用力;所述第三平台用于所述第三外部物体设置。
根据本申请实施例的一个方面,提供了一种生产线,包括上述的驱动平台。
本申请实施例的有益效果是:提供了一种驱动平台,包括基座、第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置。其中,第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置均设置于基座上。第一驱动装置用于驱动第一外部物体沿着第一方向运动。第二驱动装置用于驱动第二外部物体沿着第二方向运动,其中,第二方向与第一方向相同或者相反。第三驱动装置用于驱动第三外部物体沿着第三方向运动,其中,第三方向与第一方向具有第一角度。第四驱动装置用于驱动第四外部物体沿着第四方向运动,其中,第四方向与第三方向相同或者相反。所述基座具有沿第五方向相对设置的第一表面和第二表面,所述第三驱动装置设置于所述第一表面,所述第四驱动装置设置于所述第二表面。通过基座将第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置连接在一起,第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置可对外部物体分别驱动,驱动平台应用于生产线,可使得生产线的布局紧凑,提高空间利用率。另外,由于第三驱动装置和第四驱动装置位于基座沿第五方向的两边,则可进一步的改善生产线在第五方向上的空间利用。
当第一驱动装置包括第一金属件、第一磁性元件和第一气浮组件时,第一驱动装置可对第一外部物体进行精密、平稳、无摩擦损耗驱动。
当第二驱动装置包括第二金属件、第二磁性元件和第二气浮组件时,第二驱动装置可对第二外部物体进行精密、平稳、无摩擦损耗驱动。
当第三驱动装置包括第三金属件、第三磁性元件和第三气浮组件时,第三驱动装置可对第三外部物体进行精密、平稳、无摩擦损耗驱动。
当第四驱动装置包括第四金属件、第四磁性元件和第四气浮组件时,第四驱动装置可对第四外部物体进行精密、平稳、无摩擦损耗驱动。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
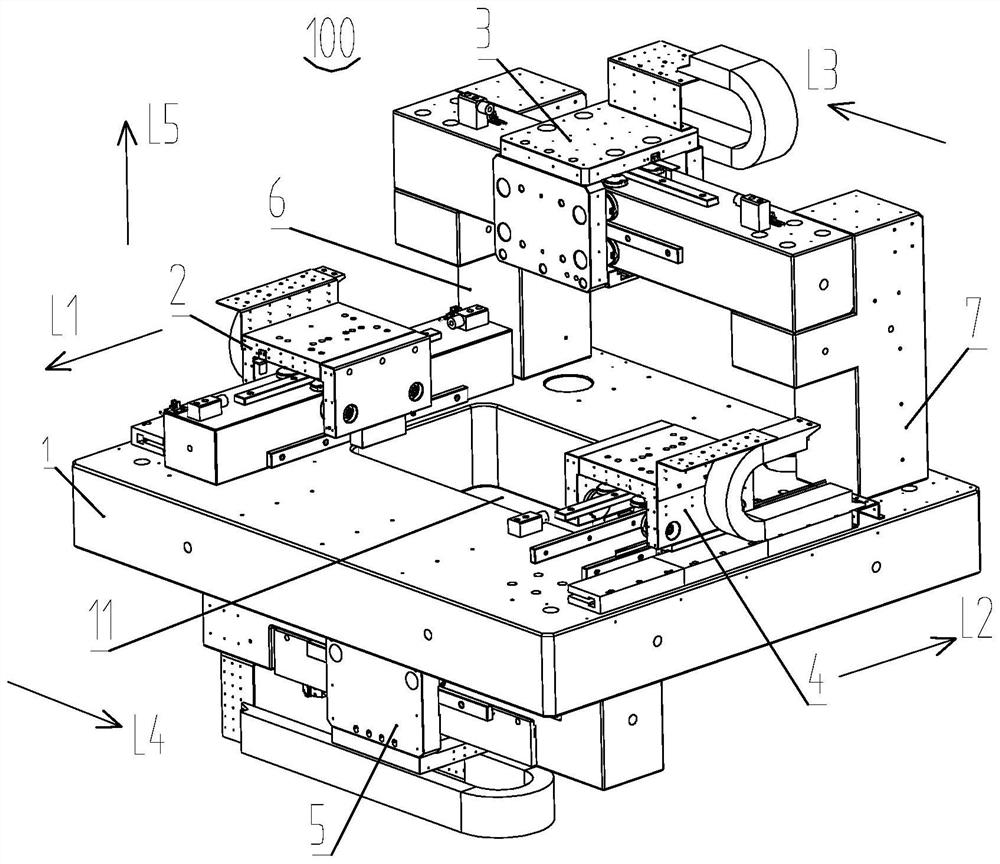
图1是本申请实施例提供的驱动平台的示意图;
图2是本申请实施例提供的第一驱动装置的爆炸示意图;
图3是本申请实施例提供的第三驱动装置的爆炸示意图;
图4是本申请实施例提供的第四驱动装置的爆炸示意图。
具体实施方式
为了便于理解本申请,下面结合附图和具体实施例,对本申请进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。在本申请的说明书中所使用的术语只是为了描述具体实施例的目的,不是用于限制本申请。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参阅图1,驱动平台100包括:基座1、第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5。其中,第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5均设置于基座1上。第一驱动装置2用于驱动第一外部物体沿着第一方向L1运动。第二驱动装置4用于驱动第二外部物体沿着第二方向L2运动,其中,第二方向L2与第一方向L1相同或者相反。第三驱动装置3用于驱动第三外部物体沿着第三方向L3运动,其中,第三方向L1与第一方向L1具有第一角度。第四驱动装置5用于驱动第四外部物体沿着第四方向L4运动,其中,第四方向L4与第三方向L3相同或者相反。所述基座1具有沿第五方向L5相对设置的第一表面(未标示)和第二表面(未标示),所述第三驱动装置3设置于所述第一表面,所述第四驱动装置5设置于所述第二表面。通过基座1将第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5连接在一起,第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5可对外部物体分别驱动,驱动平台100应用于生产线,可使得生产线的布局紧凑,提高空间利用率。另外,由于第三驱动装置3和第四驱动装置5位于基座1沿第五方向L5的两边,则可进一步的改善生产线在第五方向L5上的空间利用。
其中,在一些实施例中,第一驱动装置2用于驱动第一外部物体沿着第一方向L1运动包括第一驱动装置2驱动第一外部物体沿着第一方向L1往复运动。
其中,在一些实施例中,第二驱动装置4用于驱动第二外部物体沿着第二方向L2运动包括第二驱动装置4驱动第二外部物体沿着第二方向L2往复运动。
其中,在一些实施例中,第三驱动装置3用于驱动第三外部物体沿着第三方向L3运动包括第三驱动装置3驱动第三外部物体沿着第三方向L3往复运动。
其中,在一些实施例中,第四驱动装置5用于驱动第四外部物体沿着第四方向L4运动包括第四驱动装置5驱动第四外部物体沿着第四方向L4往复运动。
在一些实施例中,第一角度为90度,即第三方向L3与第一方向L1垂直。
在一些实施例中,第五方向L5与第一方向L1垂直,第五方向L5与第三方向L3垂直。
在一些实施例中,第一方向L1与地面平行,第三方向L3与地面平行,第五方向L5与地面垂直,则通过将第三驱动装置3设置于所述第一表面,所述第四驱动装置5设置于所述第二表面,则在垂直于地面方向上的空间可被有效利用,提高空间利用率。
对于上述基座1,基座1用于第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5的设置。在一些实施例中,请参阅图1,基座1设置开口11,开口11用于第五外部物体的设置。第五外部物体可以是升降装置、检测装置、升降装置和检测装置的组合等。
在一些实施例中,第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5环绕所述开口11设置,从而可实现基座1的合理使用。
对于上述第一驱动装置2,请参阅图2,当第四方向L4和第三方向L3相反时,在一些实施例中,第一驱动装置2包括第一底座21、第一平台22、第一侧板23、第一金属件24、第一磁性元件25、第一电机定子26、第一电机动子27和第一气浮组件28;所述第一底座21沿所述第一方向L1设置于所述基座1;所述第一电机定子26设置于所述基座1;所述第一电机动子27设置于所述第一平台22,沿所述第一方向L1,所述第一电机动子27相对于所述第一电机定子26运动;所述第一平台22包括连接的第一板221和第二板222,第二板222远离第一板221的一端与第一侧板23连接,所述第一平台22和第一侧板23环绕所述第一底座21设置;所述第一金属件24设置于所述第一底座21;所述第一磁性元件25和第一金属件24相对设置;所述第一磁性元件25设置于所述第一板221,用于沿着第三方向L3吸附所述第一金属件24,和/或,所述第一磁性元件25设置于所述第二板222,用于沿着第五方向L5吸附所述第一金属件24,和/或,所述第一磁性元件25设置于所述第一侧板23,用于沿着所述第四方向L4吸附所述第一金属件24;所述第一气浮组件28设置于所述第一底座21,所述第一气浮组件28用于沿着第三方向L3朝所述第一板221输出作用力,和/或,所述第一气浮组件28用于沿着第五方向L5朝所述第二板222输出作用力,和/或,第一气浮组件28用于沿着第四方向L4朝所述第一侧板23输出作用力;所述第一平台22用于所述第一外部物体设置。
在一些实施例中,第一板221和第二板222垂直设置。
其中,第一板221受到的第一金属件24的作用力与其受到的第一气浮组件28的作用力相反,从而第一板221与第一底座21的相对位置稳定,在第一板221被第一电机定子26带动沿着第一方向L1移动时,第一板221与第一底座21的相对运动稳定、无摩擦损耗。另外,第一板221受到第一金属件24的作用力以及第一气浮组件28的作用力,可实现第一板221的精密移动。
同理,第二板222受到的第一金属件24的作用力与其受到的第一气浮组件28的作用力相反,从而第二板222与第一底座21的相对位置稳定,在第二板222被第一电机定子26带动沿着第一方向L1移动时,第二板222与第一底座21的相对运动稳定、无摩擦损耗。另外,第二板222受到第一金属件24的作用力以及第一气浮组件28的作用力,可实现第二板222的精密移动。
同理,第一侧板23受到的第一金属件24的作用力与其受到的第一气浮组件28的作用力相反,从而第一侧板23与第一底座21的相对位置稳定,在第一侧板23被第一电机定子26带动沿着第一方向L1移动时,第一侧板23与第一底座21的相对运动稳定、无摩擦损耗。另外,第一侧板23受到第一金属件24的作用力以及第一气浮组件28的作用力,可实现第一侧板23的精密移动。
由于第一板221可相对于第一底座21稳定、无摩擦损耗、精密移动,设置在第一平台22上的第一外部物体可相对于基座1稳定、无摩擦损耗、精密移动。
在一些实施例中,所述第一磁性元件25的数量为三个,一所述磁性元件25设置于第一板221,一所述磁性元件25设置于第二板222,一所述磁性元件25设置于第一侧板23;所述第一金属件24的数量为三个,一所述第一金属件24与一所述第一磁性元件25相对设置,第一金属件24的数量为三个且第一磁性元件25的数量为三个时,可实现设置在第一平台22上的第一外部物体可相对于基座1更加稳定、无摩擦损耗、精密的移动。
在一些实施例中,所述第一气浮组件28的数量为三个,一所述第一气浮组件28的工作面对着所述第一板221,一所述第一气浮组件28的工作面对着所述第二板222,一所述第一气浮组件28的工作面对着所述第一侧板23。第一气浮组件28的数量为三个,可实现设置在第一平台22上的第一外部物体可相对于基座1更加稳定、无摩擦损耗、精密的移动。
在一些实施例中,第一磁性元件25包括永磁体,但是,第一磁性元件25不限于永磁铁。
在一些实施例中,第一金属件24包括钢条,但是,第一金属件24不限于钢条。
在一些实施例中,第一气浮组件28包括空气轴承,空气轴承的工作面面向第一平台22的第一板221,和/或,空气轴承的工作面面向第一平台22的第二板222,和/或,空气轴承的工作面面向第一侧板23。
在一些实施例中,空气轴承的工作面设置若干通孔,若干通孔与外部气源连接,通过调整外部气源的压力,可调整空气轴承对第一平台22的第一板221的作用力,和/或,对第一平台22的第二板222的作用力,和/或,对第一侧板23的作用力。
在一些实施例中,所述第一驱动装置2还包括安装块(图未示);所述安装块设置于所述第一板221,所述第一磁性元件25与所述安装块可拆卸安装,所述安装块用于调整所述第一磁性元件25与第一金属元件沿所述第三方向L3的距离;和/或,所述安装块设置于所述第二板222,所述第一磁性元件25与所述安装块可拆卸安装,所述安装块用于调整所述第一磁性元件25与第一金属元件沿所述第五方向L5的距离;和/或,所述安装块设置于所述第一侧板23,所述第一磁性元件25与所述安装块可拆卸安装,所述安装块用于调整所述第一磁性元件25与第一金属元件沿所述第三方向L3的距离。
可以理解的是,所述第一金属件24的数量为三个且第一磁性元件25的数量为三个时,安装块的数量为三个,一所述安装块设置在所述第一平台22的第一板221,一所述安装块设置在所述第一平台22的第二板222,一所述安装块设置在所述第一侧板23。
对于上述第二驱动装置4,在一些实施例中,请参阅图1,第二驱动装置4与第一驱动装置2对称设置于所述基座1。
第二驱动装置4的结构可以与第一驱动装置2的结构相同。例如,当第四方向L4和第三方向L3相反,第二驱动装置4包括第二底座(未标示)、第二平台(未标示)、第二侧板(未标示)、第二金属件(未标示)、第二磁性元件(未标示)、第二电机定子(未标示)、第二电机动子(未标示)和第二气浮组件(未标示);所述第二底座沿所述第一方向L1设置于所述基座1;所述第二电机定子设置于所述基座1;所述第二电机动子设置于所述第二平台,沿所述第二方向L2,所述第二电机动子相对于所述第二电机定子运动;所述第二平台包括连接的第三板和第四板,第四板远离第三板的一端与第二侧板连接,所述第二平台和第二侧板环绕所述第二底座设置;所述第二金属件设置于所述第二底座;所述第二磁性元件和第二金属件相对设置;所述第二磁性元件设置于所述第三板,用于沿着第四方向L4吸附所述第二金属件,和/或,所述第二磁性元件设置于所述第四板,用于沿着第五方向L5吸附所述第二金属件,和/或,所述第二磁性元件设置于所述第二侧板,用于沿着所述第三方向L3吸附所述第二金属件;所述第二气浮组件设置于所述第二底座,所述第二气浮组件用于沿着第四方向L4朝所述第三板输出作用力,和/或,所述第二气浮组件用于沿着第五方向L5朝所述第四板输出作用力,和/或,第二气浮组件用于沿着第三方向L3朝所述第二侧板输出作用力,所述第二平台用于所述第二外部物体设置。设置在第二平台上的第二外部物体可相对于基座1稳定、无摩擦损耗、精密移动。
可以理解的是,和第一驱动装置2相同的,第二驱动装置4中的第二金属件和第二磁性元件的数量均可设置为三个,第二气浮组件的数量可设置为三个,从而实现设置在第二平台上的第二外部物体可相对于基座1更加稳定、无摩擦损耗、精密的移动。
在一些实施例中,第二磁性元件包括永磁体,但是,第二磁性元件不限于永磁铁。
在一些实施例中,第二金属件包括钢条,但是,第二金属件不限于钢条。
在一些实施例中,第二气浮组件包括空气轴承,空气轴承的工作面面向第二平台的第三板,和/或,空气轴承的工作面面向第二平台的第四板,和/或,空气轴承的工作面面向第二侧板。
当然,第二驱动装置4也可设置安装块,此处不再赘述。
值得说明的是,在一些实施例中,第二外部物体和第一外部物体是同一个物体,则第一驱动装置2和第二驱动装置4可同时对同一个外部物体驱动。
上述驱动平台100还包括第一立柱6和第二立柱7,第一立柱6和第二立柱7沿第三方向L3相对设置于基座1的第一表面,第三驱动装置3的一端设置于所述第一立柱6,所述第三驱动装置3的另一端设置于所述第二立柱7,从而,通过设置第一立柱6和第二立柱7在第五方向L5上的尺寸,则在第五方向L5上,所述第三驱动装置3与基座1的距离可被调整。
对于上述第三驱动装置3,请参阅图1和图3,当第二方向L2与第一方向L1相反,在一些实施例中,所述第三驱动装置3包括第三底座30、第三平台34、第三下板35、第三上板33、第三侧板34、第三磁性元件35、第三金属件36、第三气浮组件37和第三电机动定子组件38;沿所述第三方向L3,所述第三底座30的一端设置于所述第一立柱6,所述第三底座30的另一端设置于所述第二立柱7;所述第三电机动定子组件38的定子端设置于所述第三底座30;所述第三电机动定子组件38的动子端设置于所述第三侧板34,沿所述第三方向L3,所述第三电机动定子组件38的动子端相对于所述第三电机动定子组件38的定子端运动;所述第三平台34和第三侧板34沿所述第一方向L1相对设置,所述第三下板35和第三上板33沿所述第五方向L5相对设置,所述第三平台34、第三下板35、第三侧板34和第三上板33依次连接,所述第三平台34、第三下板35、第三侧板34和第三上板33环绕所述第三底座30设置;所述第三金属件36设置于所述第三底座30;所述第三磁性元件35和第三金属件36相对设置;所述第三磁性元件35设置于所述第三平台34,用于沿着第一方向L1吸附所述第三金属件36,和/或,所述第三磁性元件35设置于所述第三上板33,用于沿着第五方向L5吸附所述第三金属件36,和/或,所述第三磁性元件35设置于所述第三侧板34,用于沿着所述第二方向L2吸附所述第三金属件36;所述第三气浮组件37设置于所述第三底座30,所述第三气浮组件37用于沿着第一方向L1朝所述第三平台34输出作用力,和/或,所述第三气浮组件37用于沿着第五方向L5朝所述第三上板33输出作用力,和/或,第三气浮组件37用于沿着第二方向L2朝所述第三侧板34输出作用力;所述第三平台34用于所述第三外部物体设置。
其中,第三平台34受到的第三金属件36的作用力与其受到的第三气浮组件37的作用力相反,从而第三平台34与第三底座30的相对位置稳定,在第三平台34被第三电机供定子组件的定子端带动沿着第三方向L3移动时,第三平台34与第三底座30的相对运动稳定、无摩擦损耗。另外,第三平台34受到第三金属件36的作用力以及第三气浮组件37的作用力,可实现第三板的精密移动。
同理,第三上板33受到的第三金属件36的作用力与其受到的第三气浮组件37的作用力相反,从而第三上板33与第三底座30的相对位置稳定,在第三上板33被第三电机动定子组件38的定子端带动沿着第三方向L3移动时,第三上板33与第三底座30的相对运动稳定、无摩擦损耗。另外,第三上板33受到第三金属件36的作用力以及第三气浮组件37的作用力,可实现第三上板33的精密移动。
同理,第三侧板34受到的第三金属件36的作用力与其受到的第三气浮组件37的作用力相反,从而第三侧板34与第三底座30的相对位置稳定,在第三侧板34被第三电机动定子组件38的定子端带动沿着第三方向L3移动时,第三侧板34与第三底座30的相对运动稳定、无摩擦损耗。另外,第三侧板34受到第三金属件36的作用力以及第三气浮组件37的作用力,可实现第三侧板34的精密移动。
由于第三平台34可相对于第三底座30稳定、无摩擦损耗、精密移动,设置在第三平台34上的第三外部物体可相对于基座1稳定、无摩擦损耗、精密移动。
在一些实施例中,所述第三磁性元件35的数量为三个,一所述第三磁性元件35设置于第三平台34,一所述第三磁性元件35设置于第三上板33,一所述第三磁性元件35设置于第三侧板34;所述第三金属件36的数量为三个,一所述第三磁性元件35与一所述第三金属件36相对设置,第三金属件36的数量为三个且第三磁性元件35的数量为三个时,可实现设置在第三平台34上的第三外部物体可相对于基座1更加稳定、无摩擦损耗、精密的移动。
在一些实施例中,所述第三气浮组件37的数量为三个,一所述第三气浮组件37的工作面对着所述第三平台34,一所述第三气浮组件37的工作面对着所述第三上板33,一所述第三气浮组件37的工作面对着所述第三侧板34。第三气浮组件37的数量为三个,可实现设置在第三平台34上的第三外部物体可相对于基座1更加稳定、无摩擦损耗、精密的移动。
在一些实施例中,第三磁性元件35包括永磁体,但是,第三磁性元件35不限于永磁铁。
在一些实施例中,第三金属件36包括钢条,但是,第三金属件36不限于钢条。
在一些实施例中,第三气浮组件37包括空气轴承,空气轴承的工作面面向第三平台34,和/或,空气轴承的工作面面向第三上板33,和/或,空气轴承的工作面面向第三侧板34。
在一些实施例中,空气轴承的工作面设置若干通孔,若干通孔与外部气源连接,通过调整外部气源的压力,可调整空气轴承对第三平台34的第三平台34的作用力,和/或,对第三上板33的作用力,和/或,对第三侧板34的作用力。
在一些实施例中,所述第三驱动装置3也可设置安装块;所述安装块设置于所述第三平台34,所述第三磁性元件35与所述安装块可拆卸安装,所述安装块用于调整所述第三磁性元件35与第三金属元件沿所述第一方向L1的距离;和/或,所述安装块设置于所述第三上板33,所述第三磁性元件35与所述安装块可拆卸安装,所述安装块用于调整所述第三磁性元件35与第三金属元件沿所述第五方向L5的距离;和/或,所述安装块设置于所述第三侧板34,所述第三磁性元件35与所述安装块可拆卸安装,所述安装块用于调整所述第三磁性元件35与第三金属元件沿所述第一方向L1的距离。
可以理解的是,所述第三金属件36的数量为三个且第三磁性元件35的数量为三个时,安装块的数量为三个,一所述安装块设置在所述第三平台34,一所述安装块设置在所述第三上板33,一所述安装块设置在所述第三侧板34。
对于上述第四驱动装置5,请参阅图4,当第二方向L2与第一方向L1相反,在一些实施例中,第四驱动装置5包括:第四底座50、第四平台54、第四上板55、第四侧板53、第四下板54、第四磁性元件55、第四金属件56、第四气浮组件57、第四电机动子58和第四电机定子59;所述第四电机定子59设置于所述第四底座50;所述第四电机动子58设置于所述第四侧板53,沿所述第四方向L4,所述第四电机动子58相对于所述第四电机定子59运动;所述第四平台54和第四侧板53沿所述第一方向L1相对设置,所述第四下板54和第四上板55沿所述第五方向L5相对设置,所述第四平台54、第四下板54、第四侧板53和第四上板55依次连接,所述第四平台54、第四下板54、第四侧板53和第四上板55环绕所述第四底座50设置;所述第四金属件56设置于所述第四底座50;所述第四磁性元件55和第四金属件56相对设置;所述第四磁性元件55设置于所述第四平台54,用于沿着第二方向L2吸附所述第四金属件56,和/或,所述第四磁性元件55设置于所述第四上板55,用于沿着第五方向L5吸附所述第四金属件56,和/或,所述第四磁性元件55设置于所述第四侧板53,用于沿着所述第一方向L1吸附所述第四金属件56;所述第四气浮组件57设置于所述第四底座50,所述第四气浮组件57用于沿着第二方向L2朝所述第四平台54输出作用力,和/或,所述第四气浮组件57用于沿着第五方向L5朝所述第四上板55输出作用力,和/或,第四气浮组件57用于沿着第一方向L1朝所述第四侧板53输出作用力;所述第四平台54用于所述第四外部物体设置。设置在第四平台54上的第四外部物体可相对于基座1稳定、无摩擦损耗、精密移动。
可以理解的是,和第三驱动装置3相同的,第四驱动装置5中的第四金属件56和第四磁性元件55的数量均可设置为三个,第四气浮组件57的数量可设置为三个,从而实现设置在第四平台54上的第四外部物体可相对于基座1更加稳定、无摩擦损耗、精密的移动。
在一些实施例中,第四磁性元件55包括永磁体,但是,第四磁性元件55不限于永磁铁。
在一些实施例中,第四金属件56包括钢条,但是,第四金属件56不限于钢条。
在一些实施例中,第四气浮组件57包括空气轴承,空气轴承的工作面面向第四平台54,和/或,空气轴承的工作面面向第四上板55,和/或,空气轴承的工作面面向第四侧板53。
当然,第四驱动装置5也可设置安装块,此处不再赘述。
值得说明的是,在一些实施例中,第四外部物体和第三外部物体是同一个物体,则第三驱动装置3和第四驱动装置5可同时对同一个外部物体驱动。
值得说明的是,第一驱动装置2是在驱动器的作用下驱动第一外部物体运动的,第二驱动装置4是在驱动器的作用下驱动第二外部物体运动的,第三驱动装置3是在驱动器的作用下驱动第三外部物体运动的,第四驱动装置5是在驱动器的作用下驱动第四外部物体运动的,所述驱动器所涉及的程序步骤是采用现有程序步骤,控制器也是采用现有的处理器,例如:英特尔的I 3处理器、AMD锐龙处理器等等。
在本申请实施例中,驱动平台100包括基座1、第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5。其中,第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5均设置于基座1上。第一驱动装置2用于驱动第一外部物体沿着第一方向L1运动。第二驱动装置4用于驱动第二外部物体沿着第二方向L2运动,其中,第二方向L2与第一方向L1相同或者相反。第三驱动装置3用于驱动第三外部物体沿着第三方向L3运动,其中,第三方向与第一方向L1具有第一角度。第四驱动装置5用于驱动第四外部物体沿着第四方向L4运动,其中,第四方向L4与第三方向L3相同或者相反。所述基座1具有沿第五方向L5相对设置的第一表面和第二表面,所述第三驱动装置3设置于所述第一表面,所述第四驱动装置5设置于所述第二表面。通过基座1将第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5连接在一起,第一驱动装置2、第二驱动装置4、第三驱动装置3和第四驱动装置5可对外部物体分别驱动,驱动平台100应用于生产线,可使得生产线的布局紧凑,提高空间利用率。另外,由于第三驱动装置3和第四驱动装置5位于基座1沿第五方向L5的两边,则可进一步的改善生产线在第五方向L5上的空间利用。
当第一驱动装置2包括第一金属件24、第一磁性元件25和第一气浮组件28时,第一驱动装置2可对第一外部物体进行精密、平稳、无摩擦损耗驱动。
当第二驱动装置4包括第二金属件、第二磁性元件和第二气浮组件时,第二驱动装置4可对第二外部物体进行精密、平稳、无摩擦损耗驱动。
当第三驱动装置3包括第三金属件36、第三磁性元件35和第三气浮组件37时,第三驱动装置3可对第三外部物体进行精密、平稳、无摩擦损耗驱动。
当第四驱动装置5包括第四金属件56、第四磁性元件55和第四气浮组件57时,第四驱动装置5可对第四外部物体进行精密、平稳、无摩擦损耗驱动。
本申请实施例还提供了一种生产线的实施例,生产线包括所述驱动平台100。对于驱动平台100的具体结构和功能可参阅上述实施例,此处不再一一赘述。
需要说明的是,本申请的说明书及其附图中给出了本申请的较佳的实施例,但是,本申请可以通过许多不同的形式来实现,并不限于本说明书所描述的实施例,这些实施例不作为对本申请内容的额外限制,提供这些实施例的目的是使对本申请的公开内容的理解更加透彻全面。并且,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本申请说明书记载的范围;进一步地,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本申请所附权利要求的保护范围。
- 一种驱动平台以及生产线
- 一种铝合金管材淬火生产线用平台驱动装置