一种教育培训用无人自动驾驶车
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及教学培训用自动驾驶车装置领域,具体是一种教育培训用无人自动驾驶车。
背景技术
自动驾驶技术是当前热门研究方向,也是未来实现无人物流、无人环卫、无人消杀等的必备技术。现有技术中公开了多种无人驾驶汽车的教学车辆:
如中国实用新型专利CN211555178U公开了一种无人驾驶汽车教学车辆,包括车体、无人驾驶控制系统以及可抽拉平台,无人驾驶控制系统中的教学组件装配在可抽拉平台上;教学组件包括出现故障频率较高的中控机、惯导和用于转换电压的逆变器与变压器,惯导与中控机通讯连接,车体的尾部设有打开式后尾门,打开式后尾门打开时,可抽拉平台受驱动延伸至车体外部;无人驾驶控制系统中的摄像头和毫米波雷达装配于车体的头部,无人驾驶控制系统中的激光雷达装配于车顶部。大大提高了无人驾驶汽车中部件的可见度,便于学生直观学习,同时方便老师在上述部件中增设障碍而无需拆卸。还可通过显示器实时观测汽车状态,找出障碍并通过键盘鼠标的操作解除障碍,考察和锻炼学生的动手能力。
又如中国专利CN212624468U公开了一种无人驾驶汽车自动避障停车的实训教具,该实训教具包括运转底盘、教具车,所述运转底座包括底座、旋转轮模块、前轴、后轴、皮带,所述底座为框架结构,教具车包括电源系统、行驶系统、驱动系统、控制系统。该实训教具在平时可以做为新能源汽车的底盘实训台,让学生观察到新能源纯电动汽车底盘各部分的结构,教师讲授无人驾驶汽车的自动避障停车原理时,将教具车调成自动巡航模式,使学生近距离观察到无人驾驶汽车自动避让障碍物的工作过程,配合教师的理论讲解,使得教学工作更加直观、生动,从而调动了学生的学习积极性,进而提高了教师的教学质量和学生的学习效果,让学生掌握无人驾驶汽车自动避让障碍物的原理。
上述现有技术中,有关自动驾驶技术的研究一般从成熟车型改装而来,没有专门针对自动驾驶技术教育、培训而设计的车型;并且现有车辆多为演示模型,不能实现完全的实际自动驾驶功能。
发明内容
本发明所要解决的技术问题是提供一种教育培训用无人自动驾驶车,以解决现有技术中存在的缺陷。
本发明解决上述技术问题的技术方案如下:
一种教育培训用无人自动驾驶车,包括线控底盘及位于所述线控底盘上方与线控底盘可拆卸连接的车身外饰,所述车身外饰上设置有自动驾驶系统和教育配件,其中自动驾驶系统采集自动驾驶车周围信息并生成控制指令,所述线控底盘根据控制指令可控制自动驾驶车行驶到指定位置;所述教育配件包括车载显示器、交互系统和故障设置诊断系统,所述车载显示器为触摸屏,所述故障设置诊断系统通过车载显示器来设置自动驾驶车的故障并采集显示故障信息;
其中,所述交互系统包括交互主机、人机界面;其中,人机界面通过触摸屏进行操作,传输指令给交互主机执行故障设置和采集,其包括故障设置界面与故障显示界面,所述故障设置界面包括设置传感器故障,对于自动驾驶车线控底盘、自动驾驶系统中关键零部件均设置有电源断路、信号断路、信号短路、信号互短、信号对地短路故障类型;通过点击故障设置界面可以控制故障设置诊断系统设置一个或者多个上述故障;故障显示界面通过控制故障设置诊断系统采集硬件电路信号并分析处理,以显示所设置的故障;所述故障设置诊断系统包括MCU控制器、故障设置点、状态采集点和诊断面板;所述MCU控制器连接交互系统并接收故障设置指令和反馈状态信息、处理故障设置与采集逻辑,故障设置点实现对自动驾驶车关键零部件的故障状态的设置与恢复,状态采集点实现对自动驾驶车关键零部件的状态信息采集;所述诊断面板上对应每个状态采集点都设置有插孔供万用表进行信号采集;
进一步的,所述自动驾驶系统包括激光雷达、双目摄像头、上位机、毫米波雷达、超声波雷达、组合惯导系统;其中激光雷达、双目摄像头、上位机、毫米波雷达、超声波雷达、组合惯导系统均设置有信号检测传感器;上位机采集激光雷达、双目摄像头、毫米波雷达、超声波雷达的信息并将环境信息、高精度定位与导航结合,实现路径导航及自动避障功能;
进一步的,所述线控底盘包括底盘控制器、线控转向系统、线控制动系统、线控驻车系统和线控驱动系统,所述底盘控制器与线控转向系统、线控制动系统、线控驻车系统之间均设置有信号检测传感器用于检测信号状态;所述车架的中部设置有为线控底盘提供电源的电池及电池管理系统,所述底盘控制器与上位机连接用于接收控制指令,实现物流车路径导航及自动臂避障功能;
进一步的,所述交互系统通过CAN总线与MCU控制器连接进行数据传输;所述MCU控制器包括数字量输出接口和数字量输入接口,所述数字量输入接口与设置于信号检测传感器输入端和输出端的状态采集点分别连接;所述数字量输出接口与故障设置点分别连接,所述故障设置点通过接口模块设置“断开”、“接通”状态可实现传感器输入端和输出端的通断,从而实现故障的设置与恢复;
进一步的,所述车身外饰可采用玻璃、塑料、金属、树脂或碳纤维材料制成;
进一步的,所述车身外饰上设置有充电口用于为电池及电池管理系统中的电池充电;且所述车身外饰表面设置有急停按钮与线控底盘上的底盘控制器连接,所述急停按钮的信号优先级高于自动驾驶系统中上位机的指令的优先级;还设置有电源总开关控制电池及电池管理系统;
进一步的,所述车身外饰的上方设置有支架,所述支架包括位于下方的升降杆和与升降杆固定连接的三维万向可调节支架,所述升降杆上通过L型支架连接有双目相机,所述三维万向可调节支架上设置有激光雷达;其中L型支架可在升降杆上通过槽口上下调节;
本发明的有益效果是:本发明为面向自动驾驶技术研究、教学、培训及落地应用业务,集全线控底盘、车规级控制器、感知/定位/规划/控制系统等功能模块于一体的全新自动驾驶低速车平台;该平台采用模块化设计,具备全线控能力和自动驾驶功能;可以配套自动驾驶实验课程,实现自动驾驶研究、教学、培训相关需求,可以作为自动驾驶技术研究与教学的专业平台。
附图说明
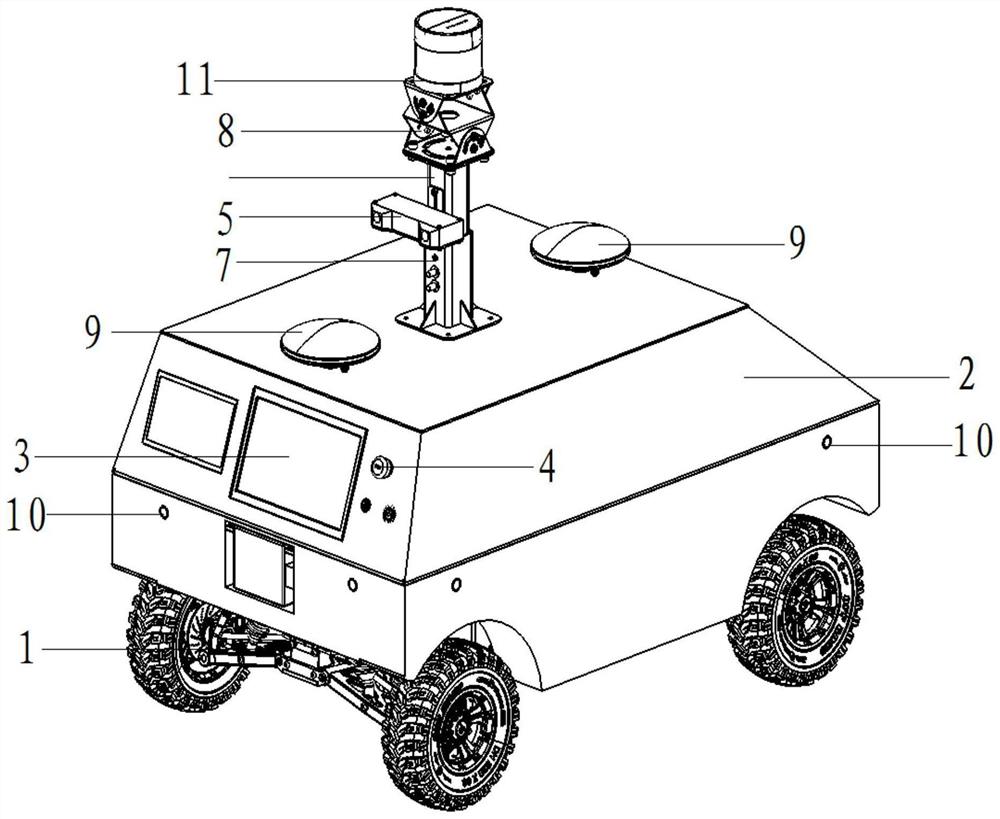
图1为本发明结构示意图一;
图2为本发明结构示意图二;
图3为本发明诊断面板线路原理结构示意图;
附图标记说明如下:
1、线控底盘,2、车身外饰,3、车载显示器,4、急停开关,5、双目相机,6、L型支架,7、槽口,8、三维万向可调节支架,9、毫米波雷达,10、超声波雷达,11、激光雷达,12、诊断面板,13、上位机,14、单目相机,15、底盘控制器,16、组合惯导,17、插孔;
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
如图1、2所示,一种教育培训用无人自动驾驶车,包括线控底盘及位于所述线控底盘上方与线控底盘可拆卸连接的车身外饰,所述车身外饰上设置有自动驾驶系统和教育配件,其中自动驾驶系统采集自动驾驶车周围信息并生成控制指令,所述线控底盘根据控制指令可控制自动驾驶车行驶到指定位置;所述教育配件包括车载显示器、交互系统和故障设置诊断系统,所述车载显示器为触摸屏,所述故障设置诊断系统通过车载显示器来设置自动驾驶车的故障并采集显示故障信息;
其中,所述交互系统包括交互主机、人机界面;其中,人机界面通过触摸屏进行操作,传输指令给交互主机执行故障设置和采集,其包括故障设置界面与故障显示界面,所述故障设置界面包括设置传感器故障,对于自动驾驶车线控底盘、自动驾驶系统中关键零部件均设置有电源断路、信号断路、信号短路、信号互短、信号对地短路故障类型;通过点击故障设置界面可以控制故障设置诊断系统设置一个或者多个上述故障;故障显示界面通过控制故障设置诊断系统采集硬件电路信号并分析处理,以显示所设置的故障;所述故障设置诊断系统包括MCU控制器、故障设置点、状态采集点和诊断面板;所述MCU控制器连接交互系统并接收故障设置指令和反馈状态信息、处理故障设置与采集逻辑,故障设置点实现对自动驾驶车关键零部件的故障状态的设置与恢复,状态采集点实现对自动驾驶车关键零部件的状态信息采集;所述诊断面板上对应每个状态采集点都设置有插孔供万用表进行信号采集;
图3所示为自动驾驶系统部分的诊断面板电路原理结构示意图,但需要注意的是,诊断面板所对应的上述关键零部件包括但不限于线控底盘上的线控驱动系统、线控转向系统、线控驻车系统、线控制动系统、充放电系统及底盘控制器以及自动驾驶系统中的激光雷达、组合惯导、毫米波雷达、单目/双目摄像头、超声波雷达等;在实施时,可在自动驾驶车的任意部件的信号传输线路上设置故障设置点来设置故障的通断以及信号检测传感器来检测信号;
在具体使用时,教师可设置两种模式来进行教学,一种是演示模式,通过控制终端控制自动驾驶系统工作,自动驾驶车在自动驾驶系统的指令控制下,发送指令给线控底盘,实现自动驾驶,使学生近距离观察到无人驾驶汽车自动避让障碍物的工作过程,配合教师的理论讲解,使得教学工作更加直观、生动;一种是故障诊断模式,首先由教师通过人机界面来控制交互主机设置故障设置点的通断,此时,自动驾驶车停止行驶,学生使用万用表对诊断面板进行检测,根据检测的状态采集点的信号来分析判断自动驾驶车何处出现故障,并给出判断结果,然后教师再通过人机界面来控制交互主机自动采集状态采集点的信号并判断出何处出现故障,由学生对照人机界面来验证自己的答案,通过理论与实践的结合,使得教学效果更好。
优选的,所述自动驾驶系统包括激光雷达、双目摄像头、上位机、毫米波雷达、超声波雷达、组合惯导系统;其中激光雷达、双目摄像头、上位机、毫米波雷达、超声波雷达、组合惯导系统均设置有信号检测传感器;上位机采集激光雷达、双目摄像头、毫米波雷达、超声波雷达的信息并将环境信息、高精度定位与导航结合,实现路径导航及自动避障功能;
优选的,所述线控底盘包括底盘控制器、线控转向系统、线控制动系统、线控驻车系统和线控驱动系统,所述底盘控制器与线控转向系统、线控制动系统、线控驻车系统之间均设置有信号检测传感器用于检测信号状态;所述车架的中部设置有为线控底盘提供电源的电池及电池管理系统,所述底盘控制器与上位机连接用于接收控制指令,实现物流车路径导航及自动臂避障功能;
优选的,所述交互系统通过CAN总线与MCU控制器连接进行数据传输;所述MCU控制器包括数字量输出接口和数字量输入接口,所述数字量输入接口与设置于信号检测传感器输入端和输出端的状态采集点分别连接;所述数字量输出接口与故障设置点分别连接,所述故障设置点通过接口模块设置“断开”、“接通”状态可实现传感器输入端和输出端的通断,从而实现故障的设置与恢复;
其中,所述的自动驾驶系统在系统软件层面上设置了包括了感知定位、规划决策、控制执行等功能模块。感知部分实现对环境信息的获取和目标识别,利用激光雷达、毫米波雷达、单/双目摄像头、超声波雷达等传感器,结合各个传感器的优缺点,相互补充,实现自动驾驶车辆360度全方位的障碍物检测、红绿灯识别等环境感知能力,确保车辆行驶的安全性。定位部分采用全球定位系统(GNSS)、惯性导航单元(IMU)、激光雷达等多种传感器数据融合实现车辆高精度定位,即使自动驾驶车在GNSS信号受到严重遮挡,无法提供具有稳定精度的定位信息的情况下,利用IMU和激光雷达的补充,依然具备高精度的自主定位能力。
规划决策模块结合感知定位模块得到的自身状态、周边障碍物信息以及地图等数据,做出如何行驶的决策,确定车辆保持车道、换道还是泊车。然后利用路径规划器完成规划轨迹的输出,使自动驾驶车辆知道如何走。控制执行模块作为自动驾驶系统的末端,与线控底盘相连接,根据规划的轨迹,完成对车辆动力、刹车以及转向等系统的控制,使自动驾驶车辆流畅安全的完成自动驾驶功能。
作为本发明技术方案的进一步优化,所述车身外饰可采用玻璃、塑料、金属、树脂或碳纤维材料制成;
优选的,所述车身外饰上设置有充电口用于为电池及电池管理系统中的电池充电;且所述车身外饰表面设置有急停按钮与线控底盘上的底盘控制器连接,所述急停按钮的信号优先级高于自动驾驶系统中上位机的指令的优先级;还设置有电源总开关控制电池及电池管理系统;
优选的,所述车身外饰的上方设置有支架,所述支架包括位于下方的升降杆和与升降杆固定连接的三维万向可调节支架,所述升降杆上通过L型支架连接有双目相机,所述三维万向可调节支架上设置有激光雷达;其中L型支架可在升降杆上通过槽口上下调节;
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种教育培训用无人自动驾驶车
- 一种无人车的自动驾驶跟随方法、系统及无人车