一种基于动态视觉传感器DVS的建筑物结构位移测量方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于视觉测量领域,具体为基于动态视觉传感器DVS的建筑物结构位移测量方法。
背景技术
地震对建筑物的破坏比较大,会对建筑物结构造成一定程度的损伤,建筑物结构位移是衡量建筑物健康状况的因素之一。目前研究最多的是相机保持静止拍摄建筑物振动,来得到建筑物的振动位移,但对于震中抖动环境下监测建筑物振动位移,人们的关注比较少,而对于房屋来说,震中的抖动幅度是最具有参考价值的,它能真实的反映房屋在抖动环境下的损伤程度,本发明是基于抖动环境下,采用动态视觉传感器来监测建筑物结构的振动位移。
目前的相机可以分为RGB相机和事件相机,RGB相机这里也称为传统相机,目前视觉测量领域基本上用的是传统相机,但是这种传统相机只比较适用于静止拍摄建筑物振动,一旦相机也处在抖动环境中,那么拍摄出来的画面可能会产生运动模糊问题,造成很大的测量误差。传统相机是非连续拍摄,信息输出不连贯,动态范围有限,当光线太亮或者太暗时输出信息有限,而且在实际应用中,我们往往只关注目标物的运动,不需要关注背景情况,而传统相机会输出全幅图像,这造成了大量数据冗余,占用更多的存储空间,也会影响处理速度。事件相机,也就是动态视觉传感器DVS,它和传统相机不同,DVS是一种事件驱动型相机,它没有“帧”的概念,当某个像素点的亮度变化值超过一定的阈值之后,它会输出一个事件(x,y,t,p),其中x和y表示当前被激活的像素点的行列位置,t表示时间戳,p表示极性,“+”表示光线由暗变亮,“-”表示光线由亮变暗,这些输出的像素点被统称为“事件流”。不同于传统相机输出所有像素点的信息,DVS只记录发生运动变化的像素点,这样就能很好地滤除掉静止的背景信息,使得产生的数据量大大减少,节省存储空间,并且数据量少,那么处理速度也会加快,降低系统实现难度,为实时监测建筑物结构健康状况提供了方向。DVS具有高动态范围,在光线过弱或过亮的情况下仍然能很好地记录目标运动信息。DVS低时延,一般响应速度能达到微秒级,有些甚至能达到纳秒级,可以快速地跟踪运动目标,可以弥补传统相机帧间信息不连续以及运动模糊问题。因此,对于震中抖动环境,DVS比传统相机拥有绝对的优势,为在抖动环境中测量建筑物结构振动位移提供了方法。
发明内容
本发明的内容为实现了一种基于动态视觉传感器DVS的建筑物结构位移测量方法,实现了相机抖动时,对目标物的位移测量,具体技术方案包括以下4个部分。
(1)事件流处理:动态视觉传感器是以事件流的形式输出目标的运动信息,这里采用按时间累积的方法将事件流累积成帧,就是截取一小段时间内的事件流,将它们同时输出,这样就能得到类似于帧的图片。
(2)图像去噪:事件流累积而来的帧可能会存在一些噪点,根据分析,这些噪点多半是一些椒盐噪声,采用均值滤波对其进行去噪。
(3)边缘检测:对去噪后的图像进行二值化处理及自动阈值分割,再采用改进的自适应canny算子进行边缘检测,得到目标圆的边缘。
(4)霍夫变换检测定位圆:采用基于梯度信息的霍夫变换对圆进行检测和定位,根据圆的半径和位置滤除掉杂圆。
(5)尺度变换:根据第一张图片圆的位置和当前图片的位置得到像素位移量,再根据毫米/像素转换因子,将像素位移量转换成实际物理位移量。
与传统相机相比,本发明的优点体现在以下几点:1、将动态视觉传感器DVS率先应用在视觉测量上,监测在震中抖动的环境下建筑物结构位移振动变化情况。2、快速记录发生运动变化的像素点信息,避免传统相机带来的运动模糊问题。3、实现方法简单,采用边缘检测和霍夫变换定位圆的简单算法即可实现位移的测量。4、突出目标运动变化信息,数据量小,节省存储空间,处理速度快,且精度高。
附图说明
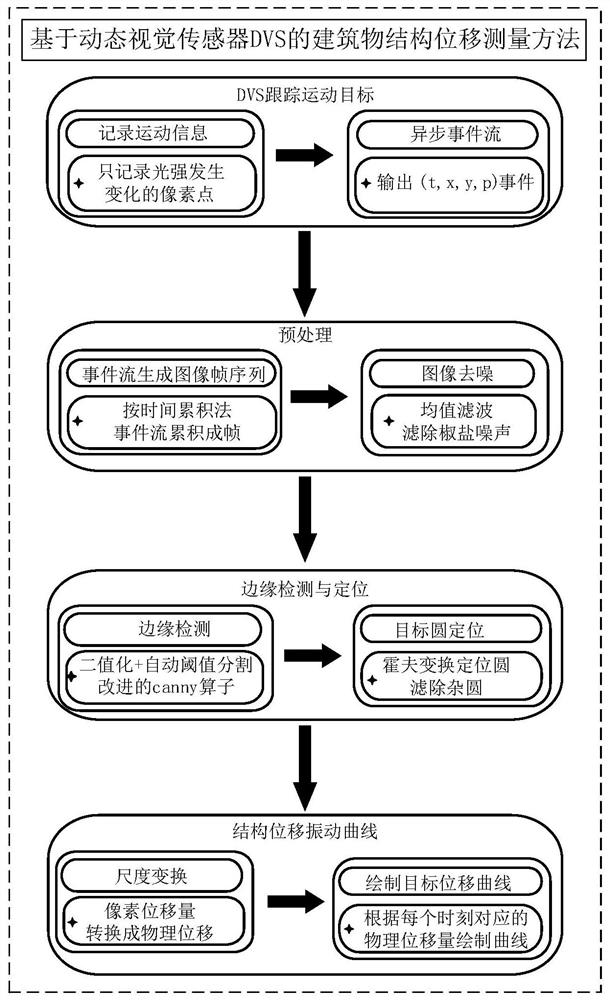
图1为本发明所涉一种基于动态视觉传感器DVS的建筑物结构位移测量方法整体流程图
图2为实验平台图
图3为DVS输出的事件流信息图
图4为事件流按照不同的累积时间累积成图片
图5为DVS和GoPro在相同测试环境下输出的图片
图6为DVS和GoPro在相同条件下对目标位移的测量结果拟合图
具体实施方式
本发明用于提供一种基于动态视觉传感器DVS的建筑物结构位移测量方法,为了使本发明的技术方案及效果更加清晰、明确,下面结合附图,对本发明的具体实施方式进行详细描述。
如图1所示,本发明设计的一种基于动态视觉传感器DVS的建筑物结构位移测量方法包括四个阶段,分别为目标跟踪阶段、预处理阶段、边缘检测与定位阶段和结构位移振动曲线生成阶段。其中预处理阶段包括事件流生成图片序列和图像去噪,边缘检测与定位阶段包括去噪后目标图像纹理的边缘检测和目标圆的定位,结构位移曲线生成阶段主要是根据尺度转换因子,将像素位移量换算成实际物理位移,然后根据时间-位移量生成结构位移曲线。
1.目标跟踪阶段
事件流获取:使用Celex-5型号的事件相机拍摄目标物的运动,这里先让事件相机处于静止状态来说明事件流的获取过程。DVS上每个像素都是独立工作的,当目标物运动时,事件相机的像素感知到目标上光照强度的变化超过一定的阈值,就会输出事件流信息(x,y,t,p),而没有发生运动的背景是无法激发事件输出,因此,DVS只获取运动的目标信息,自动滤除掉不需要的背景信息,大大降低了输出的数据量,为后续的处理工作带来方面。图2为实验平台,图3(a)为目标静止时DVS的事件流信息图,图3(b)为目标运动时DVS记录的事件流信息图。
2.预处理阶段:DVS具有低时延特性,一般响应速度能达到微妙甚至纳秒级,那么在这么短的时间内输出的事件流数量有限,很难进行边缘检测和定位。这时一般采取按时间累积的方法,累积一小段时间的事件流,然后再将其输出。累积的时间选取要合适,这样得到的目标纹理比较清晰,如果选择过短,堆叠后的信息过少,很难进行边缘检测和定位,如果选取过长,那么堆叠的信息会太多,也会对后续的处理带来不便。图4(a)为累积时间t=1ms长度时输出的图片,图4(b)为累积时间t=10ms长度时输出的图片,图4(c)为累积时间t=100ms长度时输出的图片。累积后的图像可能会存在一些噪声,根据分析,这些噪声一般为椒盐噪声,因此采用均值滤波的方法对其进行去噪。令S
其中,g(s,t)为原始图像,f(x,y)为均值滤波后得到的图像。
这里使用的是3×3的模板,
3.边缘检测与定位阶段:均值滤波后的图像会产生一定的模糊,使用二值化阈值和自动阈值分割方法对去噪后的图像进行处理,然后采用改进的Canny检测算子对其图像的进行边缘检测,算法步骤如下:
(1)计算梯度幅值和方向:选择3×3模板的sobel算子计算水平方向和垂直方向上的梯度,水平方向和垂直方向的梯度计算为:
其中,G
计算梯度值G和梯度方向θ:
(2)非极大值抑制:非极大值抑制是用来寻找像素点的局部最大值,这里要注意的是沿着梯度方向对幅值进行非极大值抑制,而不是沿着边缘方向。如在一个3×3的领域上,每一个点的领域中心与沿着其对应的梯度方向的两个像素值比较,如果中心像素值最大,则保留,否则该中心值置为0,这样就可以抑制非极大值,保留局部梯度最大的点,细化边缘。
(3)双阈值检测和连接边缘:TH和TL按照TH:TL=3:1的原则,根据阈值分割后的图像thresh自动选择系数值。
TH=0.6*thresh (6)
TL=0.2*thresh (7)
将低于TL的像素值赋值为0,将高于TH的像素值赋值为255,位于TH和TL之间的像素值使用8连通域确定。
霍夫变换检测定位圆:霍夫变换的基本原理是将原始图像空间给定的曲线通过曲线表达形式变为参数空间的一个点,这样就把原始图像空间曲线的检测问题转化为参数空间点的检测问题。圆的标准方程为:
(x-a)
其中,圆心为(a,b),半径为r。
基于梯度信息的霍夫变换检测圆先对圆的标准方程两边求x偏导数,即:
然后将其映射到参数空间,计算轮廓点处的梯度向量,然后根据搜索半径R在该梯度方向距离R的两边各投一点,最后根据投票结果画出圆的位置,再将画出的这些圆与实际轮廓对比,按实际重合像素的总数进行排序,选择得分最高的圆作为最终的圆,并给出圆心位置。
4.结构位移曲线生成阶段:地震时,对于建筑物来说,横向运动会给结构带来很大的损伤,因此这里只列出横向相对位移Δx的计算方法。
Δx=x-x
根据转换因子C换算成实际物理位移,具体形式如式(11)、(12)所示:
Δx
其中,C为给定目标的横向物理尺寸d
像素位移量Δx乘以转换因子C即可得到实际物理位移Δx
- 一种基于动态视觉传感器DVS的建筑物结构位移测量方法
- 一种钢结构建筑物结构位移监测传感器