一种倒U型弹夹式雪糕棒收集装置
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及一种雪糕棒收集装置,特别指在雪糕棒加工行业中一种方便快捷、自动化程度高的倒U型弹夹式雪糕棒收集装置。
背景技术
随着人们生活水平的不断提高,雪糕的消费量越来越大。雪糕棒作为绝大多数雪糕生产的必备配件之一,其需求量也与之增加。目前,绝大多数雪糕生产厂家并不制作雪糕棒,其生产雪糕时所需的雪糕棒需要从对应的雪糕棒生产厂家获取。根据雪糕生产线的特点,所提供的雪糕棒需以纸带打捆,然而,目前的雪糕棒收集作业,多数通过人工将雪糕棒生产线上已加工完成的雪糕棒进行收集,这种收集方式不仅生产效率低下,工作人员工作单调,且因工作人员工作能力的不同,使收集后再打捆的雪糕棒捆质量不一,从而降低了雪糕棒捆在后续雪糕生产线上的通用性和互换性。为此,非常有必要设计一款自动化程度高,工作稳定的雪糕棒收集装置。
发明内容
本发明解决的技术问题是提供一种倒U型弹夹式雪糕棒收集装置,这种雪糕棒收集装置结构稳定,自动化程度高。
本发明要解决的技术问题由以下结构来实现:一种倒U型弹夹式雪糕棒收集装置,包括倒U型弹夹料仓、机架、雪糕棒输送链、从动链轮、驱动链条、主动链轮、输送链链轮、复位弹簧、八面凸轮、拨杆、转轴、楔形块、锁止弹簧,其特征是:所述倒U型弹夹式雪糕棒收集装置放置在雪糕棒加工线的末端,对雪糕棒输送链上已加工成型的雪糕棒进行收集作业,由雪糕棒输送链的输送链链轮通过驱动链条驱动八面凸轮转动,从而使八面凸轮的转速与雪糕棒输送链的转速成正比,八面凸轮每转动一个面,正好有一根雪糕棒经过倒U型弹夹料仓,拨杆围绕转轴转动,八面凸轮与拨杆的中间位置相接触,当雪糕棒输送链上的雪糕棒到达倒U型弹夹料仓的下方时,八面凸轮正好转动至远休止角的最大值,通过拨杆将雪糕棒抬起至倒U型弹夹料仓内楔形块的上方,楔形块通过锁止弹簧锁紧后,将雪糕棒固定在倒U型弹夹料仓内,当八面凸轮转动至回程角时,通过复位弹簧将拨杆拉回,随着拨杆抬起到倒U型弹夹料仓内的雪糕棒数量的增多,雪糕棒从倒U型弹夹料仓的另一端排出。
本发明的工作原理是:一种倒U型弹夹式雪糕棒收集装置的雪糕棒输送链将加工成型的雪糕棒输送至倒U型弹夹料仓的下方,雪糕棒输送链的输送链链轮与主动链轮同轴,主动链轮与从动链轮通过驱动链条相连接,从动链轮与八面凸轮同轴,致使雪糕棒输送链与八面凸轮的转速成正比,拨杆固定在转轴上,转轴固连在机架上且可在机架上转动,八面凸轮与拨杆的中间位置相接触,当八面凸轮转动至远休止角的最大值时,雪糕棒输送链上的雪糕棒正好到达倒U型弹夹料仓的下方,八面凸轮使拨杆围绕转轴转动,拨杆的另一端将雪糕棒输送链上的雪糕棒抬起至倒U型弹夹料仓内的楔形块的上方,接着,随着雪糕棒输送链的转动八面凸轮转动至回程角,拨杆在复位弹簧的拉力作用下降落,此时通过锁止弹簧将楔形块推出,将抬起至倒U型弹夹料仓内的雪糕棒进行锁紧,随着拨杆抬起到倒U型弹夹料仓内的雪糕棒数量的增多,雪糕棒从倒U型弹夹料仓的另一端排出,通过扎带机构对雪糕棒进行打捆作业,这样,在雪糕棒随雪糕棒输送链运来时,倒U型弹夹式雪糕棒收集装置自动启动作业,避免了设备的空转,杜绝能耗浪费,对雪糕棒输送链上的雪糕棒进行自动收集作业,降低了工作人员的工作强度,且收集的雪糕棒整齐有序,方便了雪糕棒的打捆作业,提高了其在雪糕生产线上的通用性。
本发明的优点:一种倒U型弹夹式雪糕棒收集装置可根据雪糕棒加工生产线的运行状态自动启动,避免了雪糕棒收集装置空转现象的发生,杜绝能耗浪费;对雪糕棒输送链上的雪糕棒的收集完全自动化,降低了工作人员的工作强度,且收集的雪糕棒整齐有序地排列在倒U型弹夹料仓的另一端,方便了雪糕棒的打捆作业,提高了其在后续雪糕生产线上的通用性。
附图说明
下面结合附图举实例做进一步详细描述:
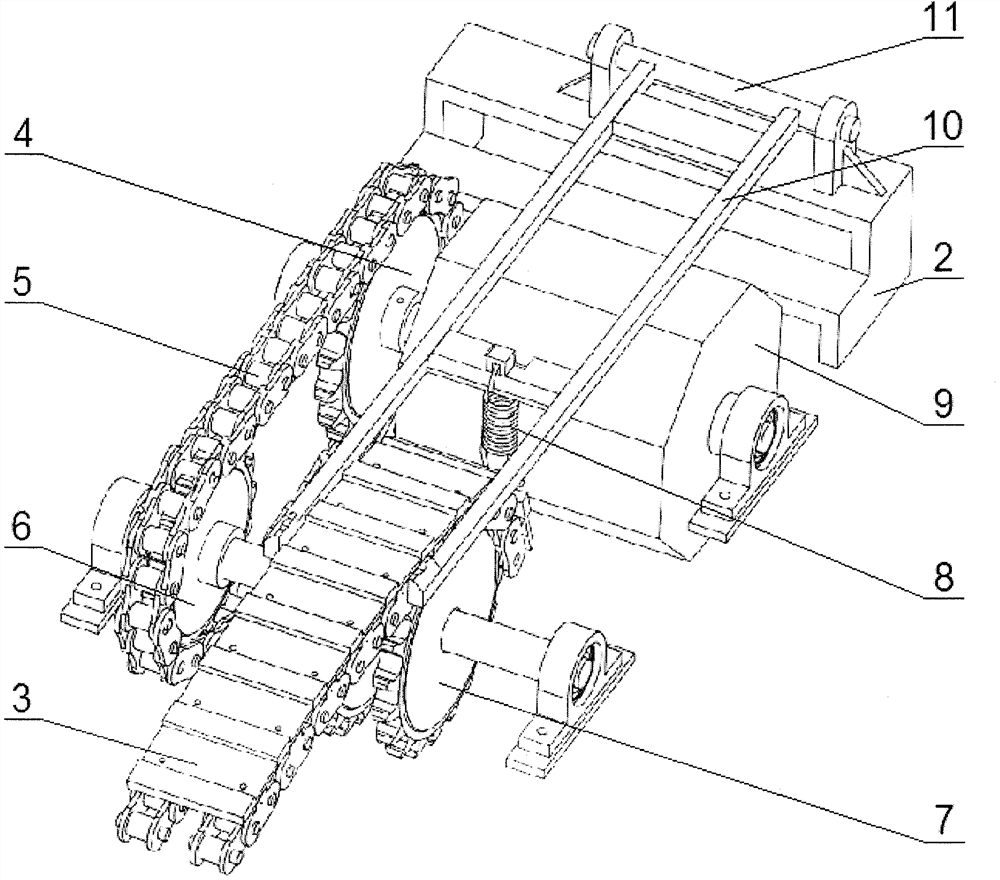
图1是一种倒U型弹夹式雪糕棒收集装置的立体示意图。
图2是一种倒U型弹夹式雪糕棒收集装置的八面凸轮局部示意图。
图3是一种倒U型弹夹式雪糕棒收集装置的拨杆局部示意图。
图4是一种倒U型弹夹式雪糕棒收集装置的倒U型弹夹料仓立体剖视图。
图5是一种倒U型弹夹式雪糕棒收集装置的楔形块立体剖视图。
其中:
1、倒U型弹夹料仓;2、机架;3、雪糕棒输送链;4、从动链轮;5、驱动链条;6、主动链轮;7、输送链链轮;8、复位弹簧;9、八面凸轮;10、拨杆;11、转轴;12、楔形块;13、雪糕棒;14、锁止弹簧;
具体实施方式
如图1所示,一种倒U型弹夹式雪糕棒收集装置放置在雪糕棒加工线的末端,对雪糕棒输送链3上已加工成型的雪糕棒13进行收集作业,雪糕棒输送链3将雪糕棒13输送至倒U型弹夹料仓1的下方,如图2、图3所示,雪糕棒输送链3的输送链链轮7与主动链轮6同轴,主动链轮6与从动链轮4通过驱动链条5相连接,从动链轮4与八面凸轮9同轴,致使雪糕棒输送链3与八面凸轮9的转速成正比,拨杆10固定在转轴11上,转轴11固连在机架2上且可在机架2上转动,八面凸轮9与拨杆10的中间位置相接触,当八面凸轮9转动至远休止角的最大值时,雪糕棒输送链3上的雪糕棒13正好到达倒U型弹夹料仓1的下方,八面凸轮9使拨杆10围绕转轴11转动,如图4、图5所示,拨杆10的另一端将雪糕棒输送链3上的雪糕棒13抬起至倒U型弹夹料仓1内的楔形块12的上方,接着,随着雪糕棒输送链3的转动八面凸轮9转动至回程角,拨杆10在复位弹簧8的拉力作用下降落,此时通过锁止弹簧14将楔形块12推出,将抬起至倒U型弹夹料仓1内的雪糕棒13进行锁紧,随着拨杆10抬起到倒U型弹夹料仓1内的雪糕棒13数量的增多,雪糕棒13从倒U型弹夹料仓1的另一端排出,通过扎带机构对雪糕棒13进行打捆作业,这样,在雪糕棒13随雪糕棒输送链3运输过来时,倒U型弹夹式雪糕棒收集装置自动启动作业,避免了设备的空转,杜绝能耗浪费,对雪糕棒输送链3上的雪糕棒13进行自动收集作业,降低了工作人员的工作强度,且收集的雪糕棒整齐有序,方便了对雪糕棒的打捆作业,提高了其在雪糕生产线上的通用性。
- 一种倒U型弹夹式雪糕棒收集装置
- 一种倒U型弹夹式雪糕棒收集装置