一种基于北斗定位及5G视频技术车辆远程监管终端
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及车辆远程监管技术领域,尤其涉及一种基于北斗定位及5G视频技术车辆远程监管终端。
背景技术
目前,车载远程监控是一款车载产品附属工作软件,主要包括中心管理系统、中心转发服务器及远程监控客户端三个部分。车载远程监控系统可实现无线远程监控、GPS地图定位、车辆历史行驶轨迹回放、语音对讲、报警联动、远程录像存储、远程下载录像、车辆区域管理、设备远程升级等等。车载监控部分车载监控终端部分由摄像头、车载DVR、控制设备和无线路由器组成。摄像头负责采集视频数据并由车载DVR进行编码处理,把编码后的数据通过模块化的无线路由器传送到远程指挥调度中心。传输部分主要采用无线和有线方式进行传输。在运动车辆上,目前可以采用5G网络进行视频传送,DVR采集并压缩视频信号后,通过无线网络把压缩后的视频数据发送到指挥调度中心。而系统中完成DVR与IP网络通讯工作的就是无线路由器。无线路由器最大限度地提高系统的吞吐量,使无线监控视频更加流畅,无线路由器支持VPN隧道,固定IP拨号,双向认证的功能,充分保证系统的安全性和稳定性。
现有的基于北斗定位及5G视频技术车辆远程监管终端大多只能对工程机械车辆的定位实现监管,并且对工程机械车辆所处环境、现场情况进行记录及上传,但是相对车辆行驶来看,车辆必经之路上的路况地貌无法实现提前勘测,车辆作业时往往会因为路况不明导致绕道,从而造成了工作效率低的问题,而现有专利不易解决此类问题,因此,亟需一种基于北斗定位及5G视频技术车辆远程监管终端来解决上述问题。
发明内容
基于现有基于北斗定位及5G视频技术车辆远程监管终端,相对车辆行驶来看,车辆必经之路上的路况地貌无法实现提前勘测,车辆作业时往往会因为路况不明导致绕道,从而造成了工作效率低的问题的技术问题,本发明提出了一种基于北斗定位及5G视频技术车辆远程监管终端。
为了实现上述目的,本发明采用了如下技术方案:
一种基于北斗定位及5G视频技术车辆远程监管终端,所述监管终端安装于技术车辆上,所述监管终端包括处理器、输入模块、视频采集模块、探头、控制模块和5G通讯模块。
5G通信模块:分别与主控的处理器和云监管平台通讯,实现监管终端与云平台的信息传送。
作为本发明再进一步的方案:所述视频采集模块与处理器相连接,且探头与视频采集模块相连,探头安装在技术车辆的顶部外周。
视频采集模块:通过探头对工程机械车辆的现场周围情况进行采集,将所采集的信息传送到处理器。
作为本发明再进一步的方案:所述控制模块包括智能制动模块、北斗定位模块和信息处理模块。
北斗定位模块:与控制模块相连,用于对工程机械车辆的当前位置进行定位,控制模块控制北斗定位模块对技术车辆当前环境进行定位,并将定位信息传送到地貌信息储存模块储存。
作为本发明再进一步的方案:所述北斗定位与地貌信息储存模块相连接,地貌信息储存模块用于:对北斗定位模块定位地方的地貌信息储存。
作为本发明再进一步的方案:所述信息处理模块用于:对视频采集模块采集到的信息进行处理。
作为本发明再进一步的方案:所述信息处理模块上连接有报警模块,报警模块是用于:在恶劣路况的情况下发出报警信号,为技术车辆起到预警作用。
作为本发明再进一步的方案:还包括无人机模块,所述无人机模块设置在技术车辆上的专有位置。
作为本发明再进一步的方案:所述与无人机模块连接有独立的信息处理模块,信息处理模块上连接有输出模块。
作为本发明再进一步的方案:所述信息处理模块上连接有地貌模块,地貌采集模块上连接有扫描仪模块。
扫描仪模块:安装在无人机上,无人机通过扫描仪模块对车辆一定距离的前方进行扫描,并将扫描到的地貌信息传输到地貌采集模块上
作为本发明再进一步的方案:所述输出模块将信息处理模块处理过的道路地貌信息输入,输入模块从输出模块接收信息,并将信息传输给处理器,处理器通过控制器实现车辆监管。
本发明的有益效果为:
1.通过设置无人机模块和扫描仪模块,在车辆行驶时,无人机模块启动,保持一定距离的在车辆前进的道路上保持扫描,无人机上设置的扫描仪模块会沿着路径进行扫描,同时扫描到的信息会传输到地貌采集模块内进行归类整理,然后传输到信息处理模块内部,通过信息处理模块的处理后,经输出模块和输入模块传到处理器上,处理器根据反馈回来的道路信息对控制器发布指令,如果道路有障碍或者路面不平,报警模块会产生报警提醒,控制器即会控制智能制动模块产生制动,实现了提醒障碍等恶劣路面的提前预警和制动,便于更快的选择最优路线;
2.通过设置视频采集模块,视频采集模块将技术车辆的所处环境信息上传到云平台,使得监控中心管理人员能够及时了解外界的技术车辆的运行情况,进而对技术车辆进行监控,并且通过北斗定位模块对工程机械车辆的当前位置进行定位,便于监控人员对技术车辆位置进行锁定,当技术车辆在信号差的地方出现故障时,可以根据定位系统更好与监控中心取得联系;
3.通过设置北斗定位模块,北斗定位模块包括设置于外壳上的北斗天线和设置于外壳内的处理器、北斗基带芯片、A/D转换器和射频前端,处理器采用四核Cortex-A9架构的ARM处理器,A/D转换器采用型号为AD7778的转换芯片,处理器分别与北斗基带芯片和主控芯片连接,北斗基带芯片通过A/D转换器与射频前端连接,射频前端与北斗天线连接,高效且稳定的实现技术车辆的定位。
附图说明
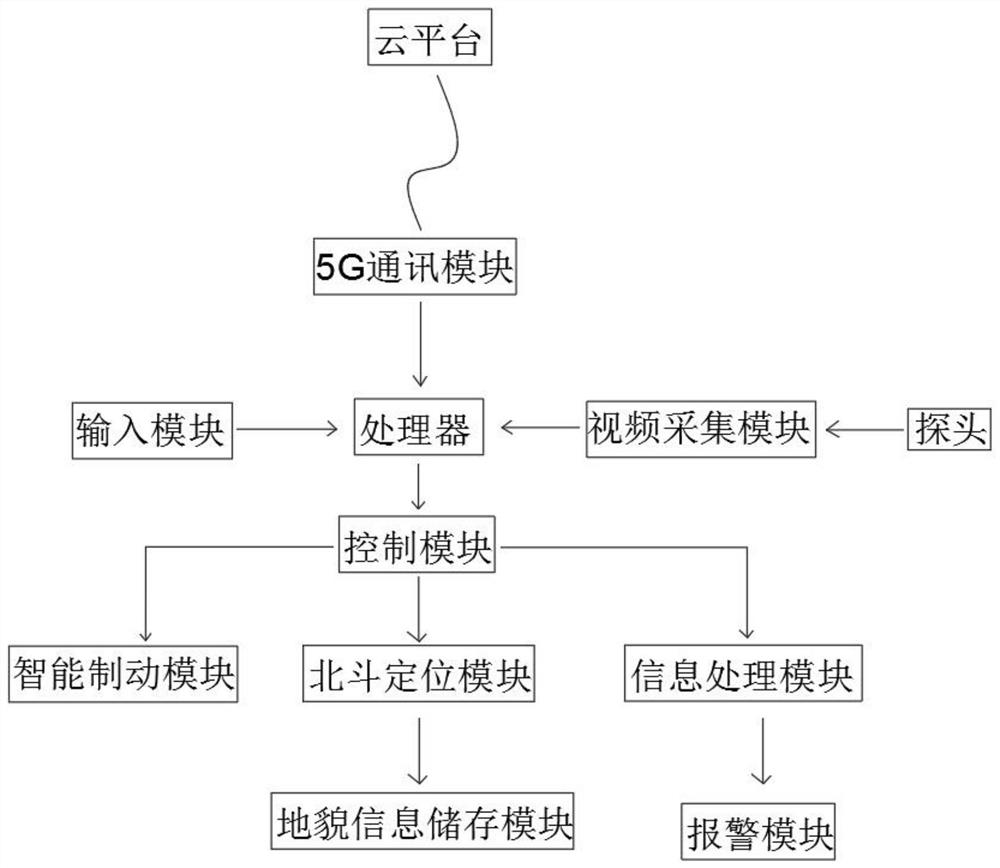
图1为本发明提出的一种基于北斗定位及5G视频技术车辆远程监管终端整体的结构框图;
图2为本发明提出的一种基于北斗定位及5G视频技术车辆远程监管终端的局部流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-2,一种基于北斗定位及5G视频技术车辆远程监管终端,监管终端安装于技术车辆上,监管终端包括处理器、输入模块、视频采集模块、探头、控制模块和5G通讯模块。
本发明中,5G通信模块:分别与主控的处理器和云监管平台通讯,实现监管终端与云平台的信息传送。
本发明中,视频采集模块与处理器相连接,且探头与视频采集模块相连,探头安装在技术车辆的顶部外周。
视频采集模块:通过探头对工程机械车辆的现场周围情况进行采集,将所采集的信息传送到处理器。
本发明中,控制模块包括智能制动模块、北斗定位模块和信息处理模块。
北斗定位模块:与控制模块相连,用于对工程机械车辆的当前位置进行定位,控制模块控制北斗定位模块对技术车辆当前环境进行定位,并将定位信息传送到地貌信息储存模块储存,北斗定位模块包括设置于外壳上的北斗天线和设置于外壳内的处理器、北斗基带芯片、A/D转换器和射频前端,处理器采用四核Cortex-A9架构的ARM处理器,A/D转换器采用型号为AD7778的转换芯片,处理器分别与北斗基带芯片和主控芯片连接,北斗基带芯片通过A/D转换器与射频前端连接,射频前端与北斗天线连接,高效且稳定的实现技术车辆的定位。
本发明中,北斗定位与地貌信息储存模块相连接,地貌信息储存模块用于:对北斗定位模块定位地方的地貌信息储存。
本发明中,信息处理模块用于:对视频采集模块采集到的信息进行处理。
本发明中,信息处理模块上连接有报警模块,报警模块是用于:在恶劣路况的情况下发出报警信号,为技术车辆起到预警作用。
本发明中,还包括无人机模块,无人机模块设置在技术车辆上的专有位置。
本发明中,与无人机模块连接有独立的信息处理模块,信息处理模块上连接有输出模块。
本发明中,信息处理模块上连接有地貌模块,地貌采集模块上连接有扫描仪模块。
扫描仪模块:安装在无人机上,无人机通过扫描仪模块对车辆一定距离的前方进行扫描,并将扫描到的地貌信息传输到地貌采集模块上,扫描到的信息会传输到地貌采集模块内进行归类整理,然后传输到信息处理模块内部,通过信息处理模块的处理后,经输出模块和输入模块传到处理器上,处理器根据反馈回来的道路信息对控制器发布指令,如果道路有障碍或者路面不平,报警模块会产生报警提醒,控制器即会控制智能制动模块产生制动,实现了提醒障碍等恶劣路面的提前预警和制动,便于更快的选择最优路线。
本发明中,输出模块将信息处理模块处理过的道路地貌信息输入,输入模块从输出模块接收信息,并将信息传输给处理器,处理器通过控制器实现车辆监管。
本发明的工作原理:无人机模块设置在技术车辆上,在车辆行驶时,无人机模块启动,保持一定距离的在车辆前进的道路上保持扫描,无人机模块配有无人机组,在一个无人机电池消耗完后自动飞回替换新的一组无人机继续运行,无人机上设置的扫描仪模块会沿着路径进行扫描,同时扫描到的信息会传输到地貌采集模块内进行归类整理,然后传输到信息处理模块内部,通过信息处理模块的处理后,经输出模块和输入模块传到处理器上,处理器根据反馈回来的道路信息对控制器发布指令,如果道路有障碍或者路面不平,报警模块会产生报警提醒,控制器即会控制智能制动模块产生制动,道路一路通畅的情况下,在车辆运行时,北斗定位模块提供车辆的实时定位,同时会将采集到的地貌信息存储到地貌信息存储模块中。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于北斗定位及5G视频技术车辆远程监管终端
- 基于北斗定位及4G视频技术的工程机械车辆远程监管终端