一种基于环扫SAR的海面波浪谱反演方法及系统
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及卫星遥感数据处理领域,尤其涉及一种基于环扫SAR的海面波浪谱反演方法及系统。
背景技术
海浪是发生在海洋表面的一类典型的波动现象,是海洋动力学中最常见的一种形式。研究海浪运动对海洋工程作业、海洋开发、海洋捕捞与养殖、海洋灾害预测等活动具有重大意义。海浪的信息通常用波浪谱的形式表达,海浪的能量与频率之间具有特定的相关性,波浪谱表征了海浪的能量在频率和传播方向上的集中分布。波浪谱可以观测海域内海浪的波长、波高、周期和传播方向等要素,具有直观易读的特点。
合成孔径雷达(SyntheticApertureRadar,SAR)是目前能够测量海洋表面波浪谱的星载设备之一,是用于海浪观测最有效的手段。但是,传统SAR的刈幅和覆盖范围有限,不适合开阔海域大覆盖面积的观测要求,不能满足大范围波浪波谱测量的高时间分辨率要求。
发明内容
为了解决上述技术问题,本发明提供了一种基于环扫SAR的海面波浪谱反演方法及系统,提高刈幅和覆盖范围,有效地克服单视向SAR的方位向非线性导致的误差。
本发明所采用的第一技术方案是:一种基于环扫SAR的海面波浪谱反演方法,包括以下步骤:
S1、获取环扫SAR数据并对环扫SAR数据进行分块处理,得到多个子图像;
S2、对子图像进行归一化处理,得到归一化后的子图像;
S3、对归一化后的子图像进行交叉谱计算和波浪谱反演,得到对应子图像反演的波浪谱数据;
S4、将子图像反演的波浪谱数据进行融合,得到最终波浪谱信息。
进一步,所述对子图像进行归一化处理具体为非线性归一化处理,公式如下:
上式中,I
进一步,所述对归一化的子图像进行交叉谱计算和波浪谱反演,得到对应子图像反演的波浪谱数据这一步骤,其具体包括:
S31、基于交叉谱正演模型对归一化的图像进行处理,得到观察交叉谱;
S32、获取风速风向信息并生成初猜波浪谱;
S33、通过初猜波浪谱进行正演计算得到初猜交叉谱,即仿真交叉谱;
S34、基于预设的价格函数、观察交叉谱和初猜交叉谱,判断是否达到收敛条件;
S35、判断是否达到收敛条件,计算迭代步长和方向导数并对波浪谱进行修正,得到修正后的波浪谱;
S36、返回步骤S33,迭代直至达到收敛条件,得到对应子图像反演的波浪谱数据。
进一步,所述预设的价格函数公式如下:
J=∫[|P
上式中,W
进一步,所述修正后的波浪谱的表达式如下:
S
上式中,S
进一步,所述将子图像反演的波浪谱数据进行融合,得到最终波浪谱信息这一步骤,其具体包括:
S41、计算子图像对应的点响应函数、波浪谱线性函数和波浪谱;
S42、将对应的点响应函数、波浪谱线性函数和波浪谱进行加权融合,得到多角度融合后的波浪谱。
进一步,所述最终波浪谱信息S(k)的计算公式如下:
上式中,H
本发明所采用的第二技术方案是:一种基于环扫SAR的海面波浪谱反演系统,包括:
数据划分模块,用于获取环扫SAR数据并对环扫SAR数据进行分块处理,得到多个子图像;
归一化模块,用于对子图像进行归一化处理,得到归一化后的子图像;
波浪谱反演模块,用于对归一化后的子图像进行交叉谱计算和波浪谱反演,得到对应子图像反演的波浪谱数据;
融合模块,将子图像反演的波浪谱数据进行融合,得到最终波浪谱信息。
本发明方法及系统的有益效果是:本发明通过交叉谱对波浪谱进行反演,克服了波浪谱波向180°模糊的问题;同时针对环扫SAR方位角360°旋转的特点,修正了方位向位移传递函数,最终将不同视向的子图像的反演结果进行融合,有效地克服单视向SAR的方位向非线性导致的误差,实现对波浪谱大范围高时间分辨率的观察。
附图说明
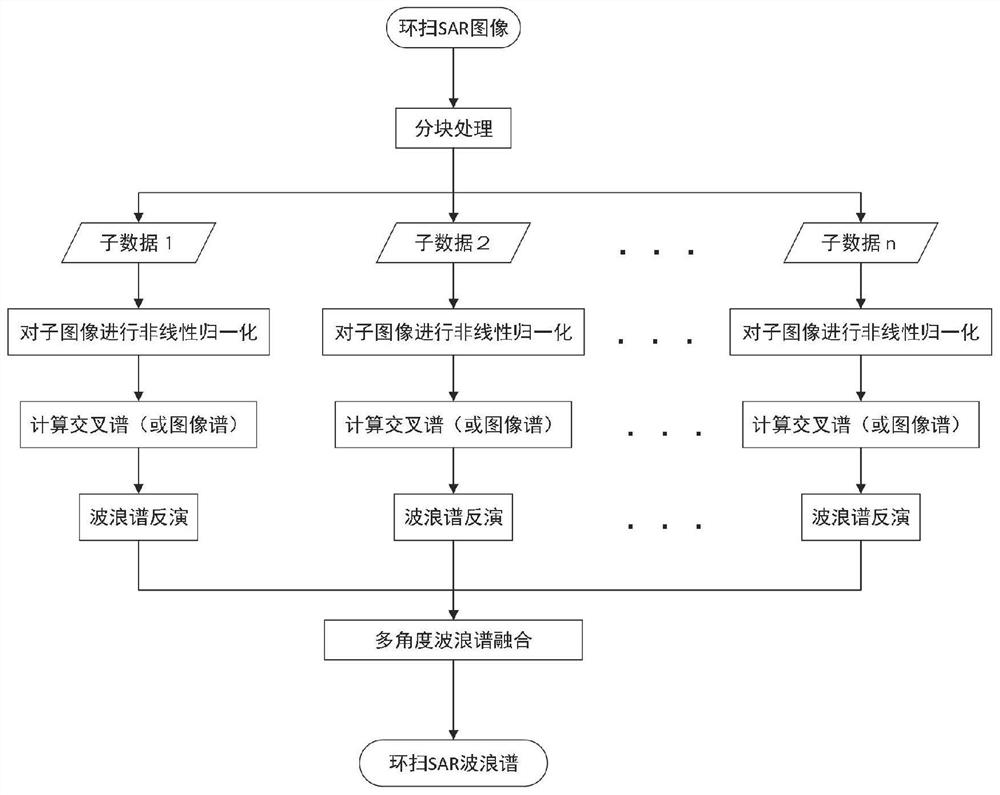
图1是本发明一种基于环扫SAR的海面波浪谱反演方法的总流程图;
图2是本发明具体实施例环扫SAR的示意图;
图3是本发明具体实施例子图像全局坐标系到局部坐标系的转换示意图;
图4是本发明具体实施例波浪谱反演的示意图。
图5是本发明一种基于环扫SAR的海面波浪谱反演系统的结构框图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
环扫SAR是一种边飞行边环扫的新体制曲线雷达,雷达载体在以速度向前飞行的同时,天线以垂直地面为轴快速进行匀速扫描,在地面形成近似环状的成像区域,通过将多个环状区域进行叠加,形成超宽的观测刈幅,环扫SAR示意图如图2所示。
参照图1,本发明提供了一种基于环扫SAR的海面波浪谱反演方法,该方法包括以下步骤:
S1、获取环扫SAR数据并对环扫SAR数据进行分块处理,得到多个子图像;
S2、对子图像进行归一化处理,得到归一化后的子图像;
S3、对归一化后的子图像进行交叉谱计算和波浪谱反演,得到对应子图像反演的波浪谱数据;
S4、将子图像反演的波浪谱数据进行融合,得到最终波浪谱。
进一步作为本方法的优选实施例,所述获取环扫SAR数据并对环扫SAR数据进行分块处理,得到多个子图像这一步骤,其具体包括:
S11、获取环扫SAR数据;
S12、按方位角将环扫SAR数据划分为多个子图像,并将子图像从全局坐标系转换到局部的斜距-方位坐标系。
具体地,海浪到交叉谱的传递函数与视向角有很大的关系,而不同视向角的数据不能统一处理。因此需要将环扫SAR图像进行分块处理,由于每个子图像的视向角较小,子图像内的传递函数近似一致,所以可以对子图像进行统一处理。
对于环扫SAR来说,子图像像素数和坐标轴的方向会随着方位角的变化而变化,为了对不同方位角进行统一处理,需将各个角度的反演结果插值到相同的分辨率,并旋转到统一的方位角。由于方位向近似为沿波束扫描方向,为了方便处理,将局部图像从全局坐标系转换到局部的斜距-方位坐标系,如图3所示,转换后的方位向指向为与雷达视向垂直的方向。
进一步作为本方法的优选实施例,所述对子图像进行归一化处理具体为非线性归一化处理,公式如下:
上式中,I
具体地,由于雷达信号符合指数分布,非线性调制更符合海面雷达信号的真实情况,非线性归一化后图像的灰度分布明显更对称。
进一步作为本方法的优选实施例,参照图4,所述对归一化的子图像进行交叉谱计算和波浪谱反演,得到对应子图像反演的波浪谱数据这一步骤,其具体包括:
S31、基于交叉谱正演模型对归一化的图像进行处理,得到观察交叉谱;
S32、获取风速风向信息并生成初猜波浪谱;
S33、对通过初猜波浪谱进行正演计算得到初猜交叉谱,即仿真交叉谱;
具体地,交叉谱函数可以表示为:
P(k,t)=∫dxe
其中,k为(k
其中,ρ
μ
其中,S(k)为波浪谱,O为原点,N
其中,ωt表示在时间间隔t内波数分量随频率发生的相移,
其中,θ是入射角,β是布拉格波的风增长率,ω是天线旋转角速度。
对于正侧视来说,方位向位移传递函数T
其中,R为斜距距离,v为雷达载体飞行速度。
但是,对于环扫SAR来说,在不同的方位向角,方位向位移并不一致,需改进环扫SAR的方位向位移传递函数为:
其中,
S34、基于预设的价格函数、观察交叉谱和初猜交叉谱,判断是否达到收敛条件;
S35、判断是否达到收敛条件,计算迭代步长和方向导数并对波浪谱进行修正,得到修正后的波浪谱;
S36、返回步骤S33,迭代直至达到收敛条件,得到对应子图像反演的波浪谱数据。
具体地,对于波浪谱这种复杂问题,由于最陡梯度法迭代慢,对步长选取比较敏感,易陷入到局部最小值,所以将其改进为拟牛顿法,这种方法迭代快,对于较为理想的二次型价格函数往往能在一两步得到最优解。所以,这里对于两种梯度方向,计算最优步长,其中第一种步长为局部梯度,第二种步长为本地迭代与上次迭代得到的波浪谱的差:
那么在第n步迭代的时候,交叉谱对这两个方向的导数分别为:
其中P
S
最优步长可以通过最小化下式得到:
通过求近似最小值解下列方程求α
化简后可以表示为:
A·β=B
其中β=[β
矩阵A的四个元素分别为:A
矩阵B的两个元素分别为:
这样步长可以用下式求解:
β=A
进一步作为本方法优选实施例,所述预设的价格函数公式如下:
J=∫[|P
上式中,W
具体地,由于SAR图像在高频区域波浪谱存在严重的非线性作用,另外环扫SAR往往分辨率较低,对高频的风浪区域反演精度有限,因此反演的代价函数还需要参考依据风浪模型得到的初猜波浪谱,因此价格函数可以改为:
J=∫[|P
其中,μ为一加权比例系数,S(k')为反演得到的波浪谱,S
进一步作为本方法优选实施例,所述修正后的波浪谱的表达式如下:
S
上式中,S
进一步作为本方法优选实施例,所述将子图像反演的波浪谱数据进行融合,得到最终波浪谱信息这一步骤,其具体包括:
S41、计算子图像对应的点响应函数、波浪谱线性函数和波浪谱;
S42、将对应的点响应函数、波浪谱线性函数和波浪谱进行加权融合,得到多角度融合后的波浪谱。
具体地,对不同方位向的子图像进行波浪谱反演后,还需将这些反演结果进行融合得到最终的波浪谱。由于环扫SAR成像的传递函数在不同方位向是不同的,而且不同方位向的分辨率也不一样,导致不同方位向的SAR图像对不同方向的波浪谱的敏感度不同。因此融合策略即通过敏感度不同对波数进行加权,敏感度高的方位向给予更高的加权值。
采用线性近似,则波浪谱和图像谱的关系可以表示为:
P(k)≈H(k)[S(k)|T(k)|
其中H(k)为给出的点响应函数
T(k)≈T
其中T
进一步作为本方法优选实施例,所述最终波浪谱信息S(k)的计算公式如下:
上式中,H
如图5所示,一种基于环扫SAR的海面波浪谱反演系统,包括:
数据划分模块,用于获取环扫SAR数据并对环扫SAR数据进行分块处理,得到多个子图像;
归一化模块,用于对子图像进行归一化处理,得到归一化后的子图像;
波浪谱反演模块,用于对归一化后的子图像进行交叉谱计算和波浪谱反演,得到对应子图像反演的波浪谱数据;
融合模块,将子图像反演的波浪谱数据进行融合,得到最终波浪谱信息。
上述方法实施例中的内容均适用于本系统实施例,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
以上是对本发明的优选实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
- 一种基于环扫SAR的海面波浪谱反演方法及系统
- 一种基于SAR卫星遥感数据的海面风速反演方法及系统