一种力控关节力矩测量和传递模块
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及机器人技术领域,具体涉及一种控关节力矩测量和传递装置。
背景技术
在工业生产中对于一些精密零件的装配,传统工业机器人只能做到位置控制,简单来讲就是只能让工业机器人改变位置姿态运动。这样的工业机器人就不够智能,它没有力觉感知能力,从而只能死板的执行位移动作,在安装精密零件时不能做到精确的控制出力,从而可能损坏一些零件,并且如果更改零件的大小就需要重新编程。
协作型机器人就具有拖动示教编程的功能,可以降低机器人示教编程的难度,降低机器人生产线的维护成本,在生产线上可以更加灵活的改变路径,但由于没有力矩反馈,不能精确测量外部的受力。
为了解决上述问题,市场上出现了力控协作机器人,是在原有协作机器人的基础上各个关节增加力矩传感器,以达到测量关节实时输出的力矩大小,从而通过各关节集成的控制器自动调节出力大小,可以对一些娇气的零件安装出力大小实现自适应控制,让零件均匀受力安装。并且当机器人在运动过程中触碰到障碍时可以立刻停下来,保护人机安全。
目前国内大多数协作机器人关节均建立在双编码器测量和弹簧SEA测量力矩基础上,上述方式不仅降低了系统刚度,还降低了机器人的力控精度,也增加了算法辨识上面的难度。
目前的协作机器人关节可以作为手术机器人关节使用,但是由于力反馈精度低,外科医生不能通过用外科医生控制台的操作手柄感受到实际手术操作时的受力,所以增加了手术的安全风险和手术时间,对患者的手术治疗效果具有一定安全隐患。
与常用的协作机器人关节相比,普通的协作机器人采用双编码器或者SEA柔性弹簧测量单元作为关节的输出力矩测量传感器,这些方法无法做到高精度的力矩控制。
发明内容
为了解决上述技术问题,本发明的目在于提供一种力控关节力矩测量和传递模块。
本发明解决上述技术问题的技术方案如下:一种力控关节力矩测量和传递模块,包括壳体、设置在壳体中的中轴、转动套设在中轴上的前外轴、套设在前外轴上的电机端编码器、谐波减速器、力矩传感器和输出法兰盘;
中轴的一端设置在壳体中,中轴的另一端延伸至壳体外部,电机端编码器设置在前外轴上,谐波减速器分别与中轴以及力矩传感器连接,力矩传感器远离谐波减速器的一端与输出法兰盘连接。
进一步地,壳体包括依次连接的轴承后盖、减速器后壳以及减速器前壳,电机端编码器通过紧固件设置在减速器后壳上,输出法兰盘与减速器前壳连接。
进一步地,力矩传感器包括力矩传感器本体以及配合连接在力矩传感器本体中的公航空插头线束,力矩传感器本体上分别设置有固定孔和销孔,通过固定孔和销孔将力矩传感器本体固定在所述输出法兰盘上。
进一步地,电机端编码器包括电机端编码器电路板和码盘,电机端编码器和所述码盘分别设置在前外轴上。
进一步地,谐波减速器包括钢轮、波发生器和杯型柔轮,钢轮设置在壳体上,波发生器一端设置在杯型柔轮上,波发生器的另一端与中轴连接,杯型柔轮套设在中轴上并与力矩传感器连接。
进一步地,中轴与谐波减速器的杯型柔轮之间设置有第一密封圈,力矩传感器与输出法兰盘之间设置有第二密封圈。
进一步地,前外轴与减速器后壳之间设置有第一骨架油封,前外轴与中轴之间设置有第二骨架油封。
进一步地,轴承后盖与输出法兰盘之间设置有交叉滚子轴承,并通过前轴承固定环和后轴承固定环固定。
进一步地,壳体上设有状态指示灯,状态指示灯包括灯壳以及发光灯带,灯壳设置在输出法兰盘上,发光灯带设置在壳体上,发光灯带采用流水灯。
进一步地,输出法兰盘上设置有零位刻度线。
本发明具有以下有益效果:本发明所提供的一种力控关节力矩测量和传递模块,其结构可靠,使用性能好,当力矩测量和转递模块运行时,前外轴作为输入轴输入力矩,会带动谐波减速器的波发生器旋转,杯型柔轮受到波发生器的驱动,相对于谐波减速器的钢轮旋转,从而驱动力矩传感器旋转,而力矩传感器又与输出法兰盘相连,从而可以测出输出法兰盘和杯型柔轮之间的相对力矩,从而起到力矩测量的效果。在前外轴转动时,同时也会带动电机端编码器的码盘的转动,通过电机端编码器电路板可以检测出相对转角,从而达到位置检测的目的。此外,在该模块中同时设置了力矩传感器和编码器,能够准确测量出输出的力矩和位移,有效的提高了机器人关节力控精度。
附图说明
图1为本发明轴测图;
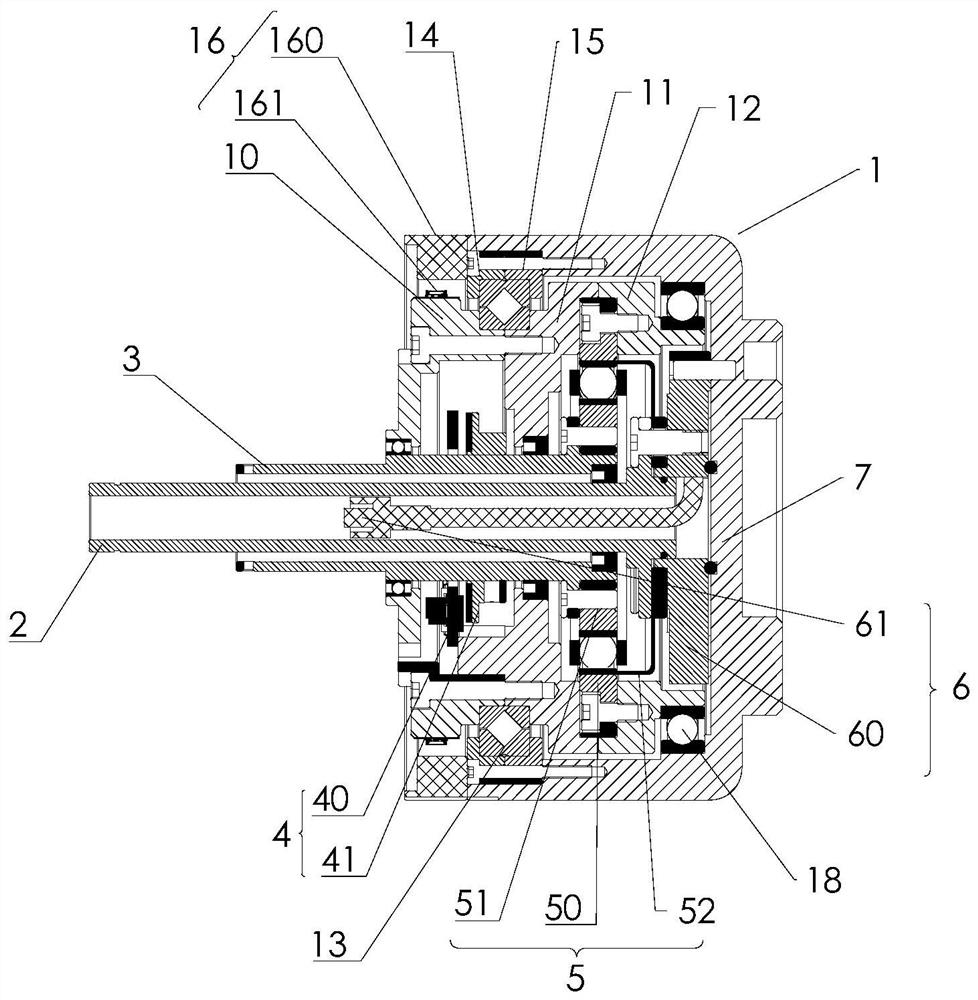
图2为本发明的剖面图;
图3为本发明的爆炸结构图;
图4为本发明中力矩传感器结构示意图;
图5为本发明中电机端编码器结构示意图;
图1至图5中所示附图标记分别表示为:1-壳体,2-中轴,3-前外轴,4-电机端编码器,5-谐波减速器,6-力矩传感器,7-输出法兰盘,10-轴承后盖,11-减速器后壳,12-减速器前壳,40-电机端编码器电路板,41-码盘,50-钢轮,51-波发生器,52-杯型柔轮,60-力矩传感器本体,61-公航空插头线束,62-固定孔,63-销孔,20-第一密封圈,21-第二密封圈,30-第一骨架油封,31-第二骨架油封,13-交叉滚子轴承,14-前轴承固定环,15-后轴承固定环,18-深沟球轴承,16-状态指示灯,160-灯壳,161-发光灯带,71-零位刻度线。
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
如图1至图3所示,一种力控关节力矩测量和传递模块,包括壳体1、设置在壳体1中的中轴2、转动套设在中轴2上的前外轴3、套设在前外轴3上的电机端编码器4、谐波减速器5、力矩传感器6和输出法兰盘7。壳体1采用铝合金制作,减少关节整体的质量,降低功耗。通过在力矩测量和传递模块内部增加力矩传感器6,以达到力矩测量的目的。通过在力矩测量和传递模块内部增设谐波减速器5,用于将力矩放大,起到力矩传递的目的。
中轴2的一端设置在壳体1中,中轴2的另一端延伸至壳体1外部,电机端编码器4设置在前外轴3上,谐波减速器5分别与中轴2以及力矩传感器6连接,力矩传感器6远离谐波减速器5的一端与输出法兰盘7连接。前外轴3与减速器后壳11之间设置有第一骨架油封30,防止减速器内部有油回到关节尾部污染编码器。前外轴3与中轴2之间设置有第二骨架油封31,防止污染输出侧编码器。轴承后盖10和输出法兰盘7之间设有交叉滚子轴承13,交叉滚子轴承13通过前轴承固定环14和后轴承固定环15固定到输出法兰盘7上,用于承受关节的径向载荷和轴向载荷,另一端设有深沟球轴承18,用于平衡交叉滚子轴承13的径向载荷。
在使用时,当力矩测量和转递模块运行时,前外轴3作为输入轴输入力矩,会带动谐波减速器5波发生器51旋转,杯型柔轮52受到波发生器51的驱动,相对于谐波减速器5钢轮50旋转,从而驱动力矩传感器6旋转,而力矩传感器6又与输出法兰盘7相连,从而可以测出输出法兰盘7和杯型柔轮52之间的相对力矩,从而起到力矩测量的效果。在前外轴3转动时,同时也会带动电机端编码器4码盘41的转动,通过电机端编码器4电路板可以检测出相对转角,从而达到位置检测的目的。
壳体1包括依次连接的轴承后盖10、减速器后壳11以及减速器前壳12,电机端编码器4通过紧固件设置在减速器后壳11上,输出法兰盘7与减速器前壳12连接。
如图4所示,力矩传感器6包括力矩传感器本体60以及配合连接在力矩传感器本体60中的公航空插头线束61,力矩传感器本体60上分别设置有固定孔62和销孔63,通过固定孔62和销孔63将力矩传感器本体60固定在输出法兰盘7上。公航空插头线束61用于电连接。力矩传感器6分别用于将谐波减速器5输出的力矩传递给输出法兰盘7、用于测量输出法兰盘7输出的力矩以及用于力矩信号转换为差分模拟电信号。使用时,该力矩传感器6连接在谐波减速器5和输出法兰盘7之间,以将谐波减速器5输出的力矩传递给输出法兰盘7并测量输出法兰盘7输出的力矩,然后再在内部进行滤波放大转换为共模电压为2.5V的差分模拟信号。
如图5所示,电机端编码器4包括电机端编码器电路板40和码盘41,电机端编码器4和码盘41分别设置在前外轴3上。电机端编码器4为绝对值磁栅编码器,19位分辨率,采用485总线通信输出,带有位置零点记忆功能,并且外接附件电池作为记忆电源。力矩输入到前外轴3,会带动码盘41转动,从而测量出前外轴3相对于减速器后壳11转过的角度。即为前外轴3作为力矩传感和测量模块的输入轴相对于壳体1转过的角角度。由此可知,本发明的力矩测量和传递模块不仅可以测量输出输出法兰盘7的力矩,而且可以测量该力矩测量和传递模块输入轴旋转的角度。
谐波减速器5包括钢轮50、波发生器51和杯型柔轮52,钢轮50设置在壳体1上,波发生器51一端设置在杯型柔轮52上,波发生器51的另一端与中轴2连接,杯型柔轮52套设在中轴2上并与力矩传感器6连接。谐波减速器5为超薄式谐波减速器5,便于和力矩传感器6安装到紧凑空间,减小了关节的尺寸和质量。为了保证减速器润滑需求,在减速器后壳11和减速器前壳12内部注有谐波减速器5专用润滑脂。此外,在本实施例中,谐波减速器5的减速比采用减速比为1:100的谐波减速器5,从而可以向力矩传感器6输出较大的力矩。
中轴2与谐波减速器5的杯型柔轮52之间设置有第一密封圈20,用于密封杯型柔轮52中的润滑油。力矩传感器6与输出法兰盘7之间设置有第二密封圈21,用于密封力矩传感器6内侧的润滑油。
壳体1上设有状态指示灯16,状态指示灯16包括灯壳160以及发光灯带161,灯壳160设置在输出法兰盘7上,发光灯带161设置在壳体1上,发光灯带161采用流水灯。优选地,该灯带采用总线控制,减少了布线数量,并可以实现全彩流水灯控制。灯壳160可以采用透明树脂材料制作,在外表面设置有零位刻度线71,用于标记关节零位。灯壳160通过紧固件固定在输出法兰盘7上,随输出法兰盘7一起旋转。发光灯带161粘贴在轴承后盖10外圆上。
输出法兰盘7上设置有零位刻度线71,用于标记关节零点位置。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种力控关节力矩测量和传递模块
- 一种力控关节力矩测量电路