一种自主游动扑翼水动力性能试验平台及测试方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明属于试验平台及测试方法领域,涉及一种自主游动扑翼水动力性能试验平台及测试方法。
背景技术
深海中蕴藏着大量的物质资源以及无数未解的谜题,随着我国深海战略的制定,对深海的观测和研究已经成为了重中之重。而水下航行器作为一种有效的水下载具,在探索深海奥秘的过程中发挥着越来越重要的作用。在水下航行器的设计方面,如何有效的提高航行器推进效率是设计的一个重要指标。扑翼作为航行器提供动力的重要部分,因此对其进行机理性研究也就显得尤为重要。在研究扑翼自身物理特性、运动参数以及多扑翼协同运动对于扑翼推进性能的影响过程中,试验是一个必不可少的环节,通过试验来获取扑翼的关键水动力性能参数,从而得出扑翼自身物理特性、运动参数以及多扑翼协同时扑翼间隔位置选取等参数对于扑翼推进性能的影响。本发明所述的一种自主游动扑翼水动力性能试验平台及测试方法,可以提供一种在循环水槽中进行自主游动扑翼水动力性能研究的试验平台,以及基于此平台的测试方法。具体来说,在该测试平台下,利用此方法可以测量出自主游动扑翼的能量转换效率、主轴载荷、扭矩系数及推力系数等衡量扑翼运动性能参数优劣的关键参数,从而可以得出柔性、运动参数以及多扑翼协同对于扑翼的运动性能影响的定量结论,同时还可以为传统的CFD数值模拟和理论研究提供实验验证。
发明内容
要解决的技术问题
为了避免现有技术的不足之处,本发明提出一种自主游动扑翼水动力性能试验平台及测试方法,可以测出自主游动扑翼的能量转换效率、主轴载荷、推力系数、等衡量其运动性能优劣的关键参数,并能根据实验数据确定出最佳的协同运动间隔等影响串联双扑翼协同运动的设计参数,且操作简单、精度高的自主游动扑翼水动力性能试验平台及测试方法。
技术方案
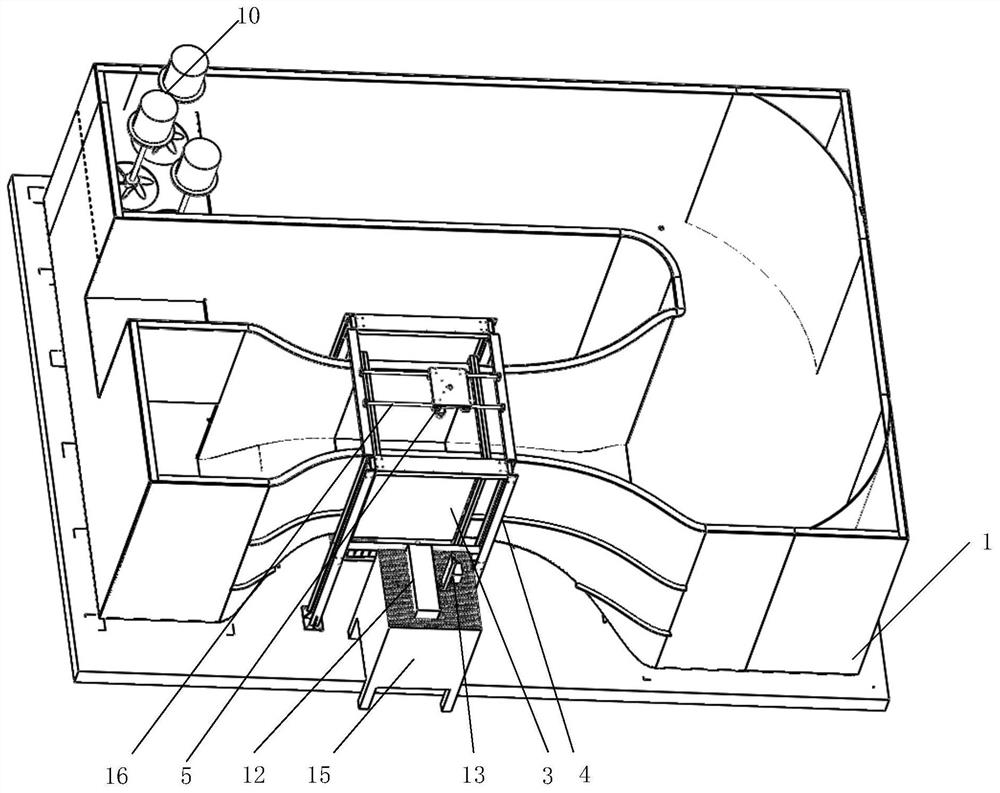
一种自主游动扑翼水动力性能试验平台,其特征在于包括循环水槽1、搭载平台4、光学平台17、叶轮10、光学平台15、激光发射器12和高速相机13;循环水槽1为 U型结构,U型的一端设有叶轮10,U型结构另一端的平直段为循环水槽试验段3,试验段上设有搭载平台4,搭载平台4的下方设有光学平台15,光学平台15上设有激光发射器12和高速相机13;所述搭载平台4上设有气浮轴承16和连接件5;所述循环水槽1的循环水槽试验段3的外壁为透明体,激光发射器12和高速相机13位于透明体的部位;U型结构端口的第一拐角6与第二拐角7之间连接有回流管道,穿过U 型结构端口的两个端面,为从第一拐角上表面延伸到第二拐角上表面的贯穿通孔23。
所述搭载平台9为四个柱子的框架结构,框架采用合金钢。
所述叶轮10为多个叶轮。
所述回流管道的贯穿通孔23直径微大于0.6m。
一种采用所述自主游动扑翼水动力性能试验平台的测试方法,其特征在于步骤如下:
步骤1:将六轴力/力矩传感器14与搭载平台4,气浮轴承16上的连接件5相连接,扑翼与六轴力/力矩传感器14相连接,扑翼置于循环水槽试验段3内;
如果是单扑翼,对扑翼进行运动初始位置校零;如果是串联双扑翼协同运动的实验中,对两扑翼分别进行初始位置校零,并记录下两扑翼间隔;
步骤2:接通试验平台的所有电源,包括传感器网箱外接电源、DPIV系统电源、扑翼控制系统的电源;
步骤3:打开传感器记录软件,测试所有传感器和计算机的通讯情况,检查传感器安装方向是否正确,确保在稍后的实验中能准确的记录并传输实验数据;
步骤4:打开DPIV系统记录软件,首先调节高速相机位置,确保能将扑翼实验区域拍摄完全,尤其是在串联双扑翼的实验中,确保能拍摄下完整的后方扑翼,然后进行参数设置,确保在稍后的实验中能准确的进行流场、涡场以及扑翼运动形态的拍摄;
步骤5:开启循环水槽叶轮10的电源,设定水流速度为实验流速v,待流速稳定后,开启扑翼运动;
步骤6:当扑翼保持稳定运动时,记录六轴力/力矩传感器的力学数据保存并导出,将DPIV系统记录下的流场参数保存并导出;
步骤7:采用DPIV系统中的分析模块,根据实验参数和测试的六轴力/力矩传感器的力学数据,DPIV系统记录下的流场参数,进行流场分析。
有益效果
本发明提出的一种自主游动扑翼水动力性能试验平台及测试方法,扑翼可根据实际情况自由更换。所述自主游动扑翼的水动力性能测试方法,采用水动力性能试验平台包括循环水槽、搭载平台以及测试系统;本发明中自主游动扑翼水动力性能测试方法可以测试出自主游动扑翼的能量转换效率、扭矩系数及推力系数等衡量自主游动扑翼运动性能优劣的关键参数,从而得出扑翼自身物理特性、运动参数对单扑翼的运动性能的影响,同时还可以得出串联双扑翼协同运动时,前方扑翼对于后方扑翼的运动促进作用,类似鱼类游动时胸鳍的运动提高尾鳍的运动性能,以及确定出串联双扑翼协同运动时最佳的配合间隔,还可以与传统的CFD数值模拟和理论研究提供实验依据。
附图说明
图1为试验平台总装图;
图2为循环水槽俯视图;
图3为试验段测试系统布放图;
图4为测试流程图。
附图标记说明:1——循环水槽,2——扑翼,3——循环水槽试验段,4——搭载平台,5——连接件,6——第一拐角,7——第二拐角,8——第三拐角,9——第四拐角,10——叶轮,11——激光面,12——激光发射器,13——高速相机,14——六轴力/力矩传感器,15——光学平台,16——气浮轴承,17——前方扑翼,18——后方扑翼。
具体实施方式
现结合实施例、附图对本发明作进一步描述:
本发明解决其技术问题所采用的技术方案是一种自主游动扑翼水动力性能试验平台及测试方法,包括,循环水槽、搭载平台以及测试系统;所述搭载平台上安装了一套气浮系统,其中气浮系统的气浮轴承段处于循环水槽试验段正上方,扑翼安装在气浮轴承段上,利于扑翼伸入循环水槽内部,所述气浮轴承段包含气浮轴承及光杆,并通过空压机从气浮轴承上小孔向光杆充入压力空气,同时通过抽气机将多余压力空气抽出,保持气浮轴承和光杆之间气压饱和,使得安装在气浮轴承段的扑翼可以在光杆上进行低摩擦自由运动,从而实现扑翼的自主游动;所述测试系统包括:六轴力/力矩传感器、DPIV系统;所述DPIV系统包含激光发射器、高速相机、荧光粒子、计算机含流场分析模块。
图1为试验平台总装图,循环水槽1占地面积约为60平方米,搭载平台4采用合金钢搭建而成,并固定在水平地面上;通过搭载平台4上的连接件5实现扑翼的吊装,同时借助气浮轴承段16,使得扑翼在水下摆动过程中可以实现在气浮轴承段16的无摩擦进给运动;试验平台还配备有测试系统,测试系统由激光发射器12,高速相机13 组成,为保证其水平度、垂直度,将激光发射器12,高速相机13摆放在光学平台15 上;图中显示为仅研究扑翼自身物理特性、运动参数对单扑翼的运动性能影响的情况,当需要进行多扑翼运动性能研究时,可通过加装连接件5来安装更多的扑翼进行实验。
图2为循环水槽俯视图,试验段用透明亚克力板粘接而成,在其周围安装有约束张力的框架使其具有侧向承压能力,洞体主体其他部分用15mm厚PP板焊接而成。循环水槽动力由三个0.6m直径的铝制叶轮8叶10提供;第一拐角6与第二拐角7之间的连接管道为贴近地面的回流管道,且延伸至第二拐角7,其延伸至第二拐角7处的上表面有一直径微大于0.6m的圆洞,叶轮旋转时将水从中抽出,提高后端水位,使其流向下游,故水流方向为顺时针;循环水槽试验段3为一1.2m×1.2m×1.2m立方体,试验段中心区域流速为0.1m/s到0.8m/s连续可调,控制精度在0.01m/s,流速稳定时间2min。
图3为试验段测试系统布放图,六轴力/力矩传感器14安装在连接件5与前方扑翼17及后方扑翼18之间用于记录实验中产生的力学数据;激光发射器12处于循环水槽试验段3的正前方,便于发射出位于扑翼2后方的水平激光面11,高速相机13摆放在循环水槽试验段3的正下方,便于完整拍摄扑翼的尾部流场。在串联双扑翼实验中,通过改变前后串联双扑翼的间距,测试配合间距对水动力性能的影响。当仅研究扑翼自身物理特性、运动参数对单扑翼的运动性能影响时可以任意拆卸掉一组扑翼进行实验。
测试方法包括以下步骤:
步骤一:将六轴力/力矩传感器14与搭载平台4,气浮轴承16上的连接件5相连接,扑翼与六轴力/力矩传感器14相连接,扑翼置于循环水槽试验段3内;
在单扑翼实验中,安装扑翼,并对扑翼进行运动初始位置校零;在串联双扑翼协同运动的实验中,安装扑翼,对两扑翼分别进行初始位置校零,并记录下两扑翼间隔,方便后期实验数据处理时,分析两扑翼间隔对扑翼水动力性能的影响;扑翼安装完成后接通气浮系统;
步骤二:接通试验平台的所有电源,包括传感器网箱外接电源、DPIV系统电源、循环水槽电源、扑翼控制系统的电源;
步骤三:打开传感器记录软件,测试所有传感器和计算机的通讯情况,检查传感器安装方向是否正确,确保在稍后的实验中能准确的记录并传输实验数据;
步骤四:打开DPIV系统记录软件,首先调节高速相机位置,通过观察电脑画面来确保高速相机能将关注区域拍摄完全,尤其是在串联双扑翼的实验中,确保能拍摄下完整的后方扑翼,然后进行参数设置,确保在稍后的实验中能准确的进行流场、涡场以及扑翼运动形态的拍摄;
步骤五:开启循环水槽,设定水流速度为实验流速v;
步骤六:当扑翼保持稳定运动时,开始记录实验数据,将六轴力/力矩传感器记录下的力学数据保存并导出,将DPIV系统记录下的流场参数保存并导出;
步骤七:单扑翼实验中,若探究运动参数对游动性能的影响,在变换运动参数进行不同组别的实验时,无须关闭电源,等待循环水槽运行平稳即可开始新的实验;若探究扑翼自身物理特性对游动性能的影响,需变换不同材质或形状的扑翼进行不同组别的实验时,必须断电操作,防止实验人员触电及损坏实验设备;同样在串联双扑翼实验中,若探究运动参数或扑翼间距对游动性能的影响,无须断电操作,若涉及探究扑翼自身物理特性对游动性能的影响,需更换扑翼才能进行新实验时,必须断电操作;
步骤八:测试结束,关闭循环水槽及其他设备。
步骤九:处理数据,计算能量利用率、推力系数等参数,利用DPIV系统中的分析模块进行流场分析,根据实验参数和测试的六轴力/力矩传感器的力学数据,DPIV 系统记录下的流场参数,进行流场分析。
在测试能量利用率方面,本方法主要通过传感器测试出扑翼受到的力,循环水槽的水流速度v已知,故两者相乘可得到有用功,电机所有参数均已知,可以得到总功,再用有用功除总功可以得出能量利用率,从而得出扑翼柔性、运动参数对单扑翼运动性能的影响;在串联双扑翼协同运动实验中,除了能得出上述结论,还额外能确定出两扑翼间配合间距对于扑翼游动性能的影响,且能进一步确定出最佳的配合间距,从而指导设计仿生航行器的扑翼布局。
在流场特性分析方面,将DPIV系统拍摄得到的视频文件导入后处理软件可以进行流场特性如涡的形态变化,流场内不同点的速度差异度等分析,还可以通过后处理软件对扑翼各个关键位置点进行轨迹追踪。
- 一种自主游动扑翼水动力性能试验平台及测试方法
- 一种仿生柔性扑翼机构及水动力性能测试方法