一种导航路径规划方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及导航技术领域,尤其涉及一种导航路径规划方法。
背景技术
随着道路建设的发展和交通工具的越来越普及,道路状况已日益复杂多变,因此人们在驾车出行时越来越依赖导航系统提供的路径规划功能。
然而,目前的导航系统并没有考虑当前实时路况,容易导致事先规划的线路上存在交通事故或者特殊天气情况下本车不能通过的路段,从而耽误了车主的行程,造成不必要的损失。目前也有相关的交通电台收集一些道路上的实时路况信息情况,然后广播给车主收听,但是这种方式的信息传递效率较低,并且需要车主手动变更导航路线,操作步骤复杂,容易导致安全问题,并不能真正解决上述问题。
因此,现有技术有待进一步改进。
发明内容
本发明提供一种导航路径规划方法,旨在解决现有技术中的缺陷,实现导航路线在触发重新规划路线的条件时自动规划路线,提高了导航技术的智能化程度。
为达到上述目的,本发明所采取的技术方案为:
本发明提供一种导航路径规划方法,包括:
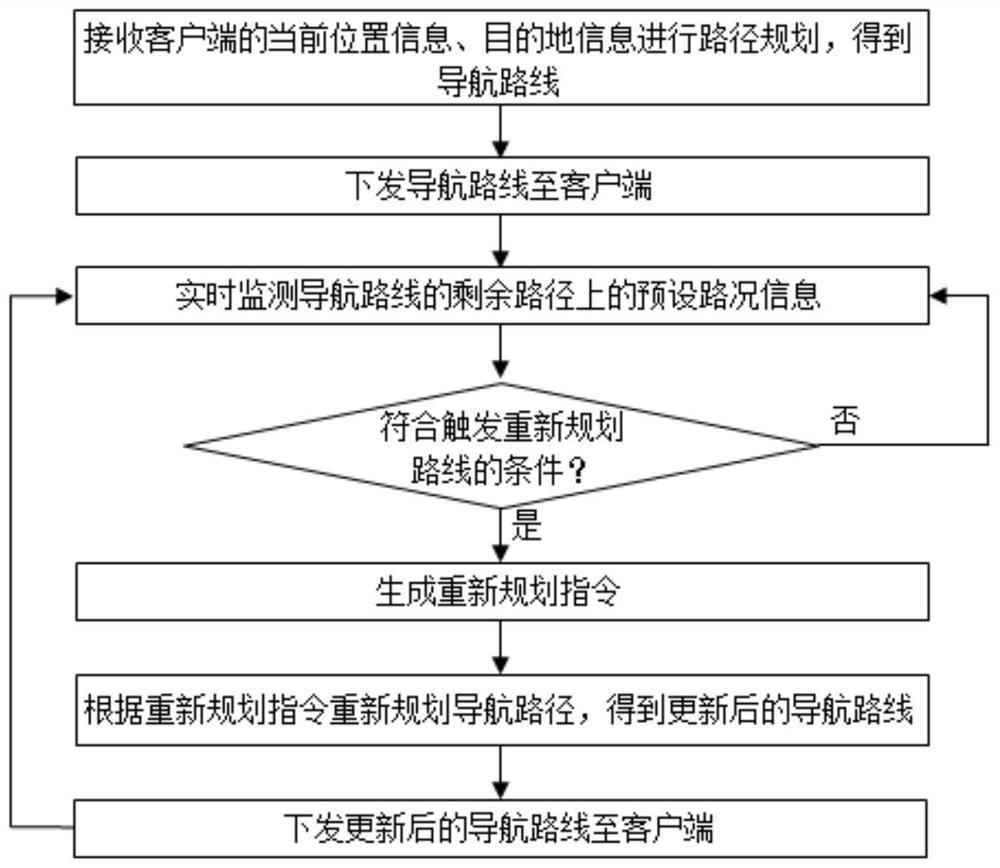
步骤1、接收客户端的当前位置信息、目的地信息进行路径规划,得到导航路线;
步骤2、下发导航路线至客户端;
步骤3、实时监测所述导航路线的剩余路径上的预设路况信息,判断是否符合触发重新规划路线的条件,是则生成重新规划指令并进入下一步,否则循环执行本步骤;
步骤4、根据所述重新规划指令重新规划导航路径,得到更新后的导航路线;
步骤5、下发更新后的导航路线至客户端,返回步骤3。
进一步地,在所述步骤3之后、步骤4之前还包括:
步骤3A、判断客户端是否发送了无感更换路线请求,是则进入下一步,否则向客户端下发预设提示信息以及变更路线请求;
步骤3B、判断是否接收到变更路线的确认信息,是则进入下一步,否则返回步骤3。
具体地,所述判断是否接收到变更路线的确认信息包括:
步骤3B-1、判断所述提示信息是否包含路段积水信息,是则检测确认信息中是否有请求车辆的底盘最小离地高度数据,是则进入步骤4,否则进入下一步;
步骤3B-2、检测确认信息中是否有请求车辆的车型标识,是则根据所述车型标识查询请求车辆的底盘最小离地高度数据,并进入步骤4,否则再次下发获取请求车辆的底盘最小离地高度数据的请求信息。
具体地,所述步骤1包括:
步骤1-1、获取电子地图中道路层次的数量;
步骤1-2、设置与所述道路层次对应的搜索范围;
步骤1-3、计算当前位置与目的地之间的直线距离;
步骤1-4、比较所述直线距离与搜索范围,将所述直线距离所属的搜索范围对应的道路层次及其以上的道路层次列为需搜索的道路层次;
步骤1-5、在预设范围内进行路径搜索;
步骤1-6、判断是否有规避路段,是则将所述规避路段设为不可通行路段,否则进入下一步;
步骤1-7、将所述路径搜索结果建立邻接矩阵的拓扑结构;
步骤1-8、通过A-star算法获得规划路径。
具体地,所述步骤3中的判断是否符合触发重新规划路线包括:
步骤3-1、判断事故路段是否具备唯一性,是则判定为不符合触发重新规划路线的条件,并向客户端下发预设提示信息,否则进入下一步;
步骤3-2、判断事故路段是否为全部堵塞型,是则判定为符合触发重新规划路线的条件,否则进入下一步;
步骤3-3、计算按照当前导航路线到达目的地所需的第一时间及第一油耗、按照变更后的导航路线到达目的地所需的第二时间及第二油耗;
步骤3-4、计算所述第一时间与所述第二时间的时间差值、所述第一油耗与所述第二油耗的油耗差值;
步骤3-5、判断所述时间差值及油耗差值是否在预设范围内,是则判定为不符合触发重新规划路线的条件,否则判定为符合触发重新规划路线的条件。
具体地,所述步骤4包括:
步骤4-1、检测所述重新规划指令中是否包含积水状况,是则进入步骤4-3,否则进入下一步;
步骤4-2、将事故路段列为不可通行路段后按照默认路线规划的方法进行路径规划;
步骤4-3、获取积水路段的积水深度、请求车辆的底盘最小离地高度;
步骤4-4、根据所述积水深度、请求车辆的底盘最小离地高度确定积水路段的通行属性,包括:若所述积水深度大于等于请求车辆的底盘最小离地高度,则将所述积水路段标记为不可通行路段,否则将所述积水路段标记为可通行路段;
步骤4-5、若所述通行属性为不可通行路段,则返回步骤4-2,否则进入下一步;
步骤4-6、获取各类车辆的平均涉水高度;
步骤4-7、获取所述请求车辆的当前位置在电子地图中的当前节点J(k);
步骤4-8、从所述当前节点J(k)按照预设算法搜索相邻节点,选取相邻节点中代价估计值最小的节点作为下一节点J(k+1),判断所述下一节点J(k+1)是否为目的地,是则进入下一步,否则循环执行本步骤;
步骤4-9、输出导航路线。
具体地,所述预设算法为:F(k)=H(k)+q*G(n),其中,F(k)表示请求车辆从当前节点J(k)移动到下一个节点所产生的代价估计值,H(k)为从当前节点J(k)移动到下一个节点的最佳路线的代价估计值,G(n)是从当前节点J(k)到预选节点J(n)产生的实际代价值,q表示权重。
具体地,所述权重q的确定方法为:
当Sc≤H1时,q=D/Sc;
当H(x-1)<Sc<Hx(x≤m)时,q=(D-Hx)/(Sc-Hx);
其中,Sc表示请求车辆的底盘最小离地高度,D表示积水深度,H1表示最低平均涉水高度,Hx表示序号为x的平均涉水高度。
本发明的有益效果在于:本发明通过实时监测导航路线的剩余路径上的预设路况信息,当出现触发重新规划路线的条件时重新规划导航路径,得到更新后的导航路线,提高了导航技术的智能化程度。
附图说明
图1是本发明的导航路径规划方法的流程示意图。
具体实施方式
下面结合附图具体阐明本发明的实施方式,附图仅供参考和说明使用,不构成对本发明专利保护范围的限制。
实施例1
本实施例提供一种导航路径规划方法,包括:
步骤1、接收客户端的当前位置信息、目的地信息进行路径规划,得到导航路线。
所述客户端(车载导航)安装在发送路径规划请求的车辆上(以下称请求车辆),所述当前位置信息、目的地信息是由客户端在进行路径规划请求时向服务端(云端)发送的,所述当前位置信息可由客户端通过卫星定位系统或者移动数据定位或者人工输入的方法来获得,所述目的地信息可由使用者通过客户端的电子地图点选POI(Point of Interest,意即“兴趣点”)获得,或者通过人工输入(触摸、手写或语音识别等方式)获得,然后通过通信网络发送给服务端。
步骤2、下发导航路线至客户端。
服务端在完成路径规划得到导航路线后,通过相关协议将导航路线的数据包下发到客户端,客户端在接收到导航路线的数据包后进行解析,展示导航路线,结合当前位置信息,开始导航。
步骤3、实时监测所述导航路线的剩余路径上的预设路况信息,判断是否符合触发重新规划路线的条件,是则生成重新规划指令并进入下一步,否则循环执行本步骤。
所述预设路况信息包括交通事故、道路临时封闭、车流量、积水状况等,可以由服务端根据实际需要进行设置。
所述触发重新规划路线的条件包括下列条件的一项或多项:交通事故或道路临时封闭导致道路中断、车流量达到阈值、积水影响请求车辆正常通行。
所述重新规划指令中包含触发重新规划路线的路况信息。
步骤4、根据所述重新规划指令重新规划导航路径,得到更新后的导航路线。
服务端将触发重新规划路线的条件的路段(事故路段)标记为回避路段,具体来说,是将所述事故路段临时标记为不可通行路段,再重新规划导航路径。
步骤5、下发更新后的导航路线至客户端,返回步骤3。
服务端在完成路径重新规划得到更新后的导航路线后,通过相关协议将更新后的导航路线的数据包下发到客户端,客户端在接收到更新后的导航路线的数据包后进行解析,展示更新后的导航路线,结合当前位置信息,开始导航。
实施例2
与实施例1不同的是,本实施例在实施例1的步骤3之后、步骤4之前还包括:
步骤3A、判断客户端是否发送了无感更换路线请求,是则进入下一步,否则向客户端下发预设提示信息以及变更路线请求。
所述无感更换路线请求是指在当前路况触发重新规划路线的条件后,无需经过车主确认,即可自动执行重新规划导航路径,用户不会感觉到导航路线的变更。所述无感更换路线请求可由客户端在请求导航路径规划时同时发送给服务端。
所述预设提示信息包括前方路况信息及对请求车辆的影响程度信息,例如,“前方发生了交通事故,本车行程将大约延误30分钟”,或者“前方路段有1米深的积水,本车可能无法安全通行”。
步骤3B、判断是否接收到变更路线的确认信息,是则进入下一步,否则返回步骤3。
在本实施例中,所述判断是否接收到变更路线的确认信息包括:
步骤3B-1、判断所述提示信息是否包含路段积水信息,是则检测确认信息中是否有请求车辆的底盘最小离地高度数据,是则进入步骤4,否则进入下一步;
步骤3B-2、检测确认信息中是否有请求车辆的车型标识,是则根据所述车型标识查询请求车辆的底盘最小离地高度数据,并进入步骤4,否则再次下发获取请求车辆的底盘最小离地高度数据的请求信息。
实施例3
与实施例1不同的是,本实施例提供所述步骤1的一种具体方法:
步骤1-1、获取电子地图中道路层次的数量。
在本实施例中,道路层次的数量设为k,从高层次到低层次依次是L1、L2…Lk。例如,L1表示国家级道路,L2表示省级道路,L3表示市县级,等等。
步骤1-2、设置与所述道路层次对应的搜索范围。
在本实施例中,搜索范围的数量设为k,从大到小依次是W1、W2…Wk,也就说W1对应于L1层次的道路,W2对应L2层次的道路,W3对应L3层次的道路。例如,W1>500km,500km≤W2<100km,W3≤100km。
步骤1-3、计算当前位置与目的地之间的直线距离。
通过当前位置、目的地的经纬度即可计算出两者之间的直线距离。
步骤1-4、比较所述直线距离与搜索范围,将所述直线距离所属的搜索范围对应的道路层次及其以上的道路层次列为需搜索的道路层次。
例如,如果直线距离为600km,属于W1,而W1对应的道路层次为L1,因此将L1层次的道路列为需搜索的道路层次;如果直线距离为200km,属于W2,而W2对应的道路层次为L2,因此选择L2和L1层次的道路;如果直线距离为80km,而属于W3,因此选择L3、L2、L1层次的道路。
步骤1-5、在预设范围内进行路径搜索。
所述预设范围为以当前位置和目的地之间的直线的中点为圆心、α*S为半径的圆形区域,其中S表示当前位置与目的地之间的直线距离,α<1,可根据实际情况进行设置。
步骤1-6、判断是否有规避路段,是则将所述规避路段设为不可通行路段,否则进入下一步。
步骤1-7、将所述路径搜索结果建立邻接矩阵的拓扑结构。
步骤1-8、通过A-star算法获得规划路径。
A-Star算法是一种静态路网中求解最短路径最有效的直接搜索方法,已广泛应用于导航路线的规划中。
实施例4
与实施例1不同的是,本实施例提供所述步骤3中的判断是否符合触发重新规划路线的一种具体方法:
步骤3-1、判断事故路段是否具备唯一性,是则判定为不符合触发重新规划路线的条件,并向客户端下发预设提示信息,否则进入下一步。
所述唯一性是指事故路段是必经之地,无法通过变更导航路线来进行回避。
所述预设提示信息包括前方路况信息及对请求车辆的影响程度信息,例如,“前方发生了交通事故,本车行程将大约延误30分钟”,或者“前方路段有1米深的积水,本车可能无法安全通行”。
步骤3-2、判断事故路段是否为全部堵塞型,是则判定为符合触发重新规划路线的条件,否则进入下一步。
所述全部堵塞型是指事故路段的所有车道均不能通行。
步骤3-3、计算按照当前导航路线到达目的地所需的第一时间及第一油耗、按照变更后的导航路线到达目的地所需的第二时间及第二油耗。
步骤3-4、计算所述第一时间与所述第二时间的时间差值、所述第一油耗与所述第二油耗的油耗差值。
步骤3-5、判断所述时间差值及油耗差值是否在预设范围内,是则判定为不符合触发重新规划路线的条件,否则判定为符合触发重新规划路线的条件。
实施例5
与实施例1不同的是,本实施例提供所述步骤4的一种具体方法:
步骤4包括:
步骤4-1、检测所述重新规划指令中是否包含积水状况,是则进入步骤4-3,否则进入下一步。
步骤4-2、将事故路段列为不可通行路段后按照默认路线规划的方法进行路径规划。
所述默认路线规划的方法可参照实施例3中的方法,也可以是其它合适的方法。
步骤4-3、获取积水路段的积水深度、请求车辆的底盘最小离地高度。
在具体实施时,可以在比较容易积水的路段设置水位计来测量积水深度D,并把所述积水深度D发送给服务端。
步骤4-4、根据所述积水深度、请求车辆的底盘最小离地高度确定积水路段的通行属性,包括:若所述积水深度大于等于请求车辆的底盘最小离地高度,则将所述积水路段标记为不可通行路段,否则将所述积水路段标记为可通行路段。
步骤4-5、若所述通行属性为不可通行路段,则返回步骤4-2,否则进入下一步。
步骤4-6、获取各类车辆的平均涉水高度。
在具体实施时,将各类车辆的平均涉水高度从低到高依次记为H1、H2…Hx…Hm,即H1表示最低平均涉水高度,Hm表示最高平均涉水高度,Hx表示序号为x的平均涉水高度。
步骤4-7、获取所述请求车辆的当前位置在电子地图中的当前节点J(k)。
步骤4-8、从所述当前节点J(k)按照预设算法搜索相邻节点,选取相邻节点中代价估计值最小的节点作为下一节点J(k+1),判断所述下一节点J(k+1)是否为目的地,是则进入下一步,否则循环执行本步骤。
所述预设算法为:F(k)=H(k)+q*G(n),其中,F(k)表示请求车辆从当前节点J(k)移动到下一个节点所产生的代价估计值,H(k)为从当前节点J(k)移动到下一个节点的最佳路线的代价估计值,G(n)是从当前节点J(k)到预选节点J(n)产生的实际代价值,q表示权重。
所述权重q的确定方法为:
当Sc≤H1时,q=D/Sc;
当H(x-1)<Sc<Hx(x≤m)时,q=(D-Hx)/(Sc-Hx);
其中,Sc表示请求车辆的底盘最小离地高度,D表示积水深度,H1表示最低平均涉水高度,Hx表示序号为x的平均涉水高度。
步骤4-9、输出导航路线。
以上所揭露的仅为本发明的较佳实施例,不能以此来限定本发明的权利保护范围,因此依本发明申请专利范围所作的等同变化,仍属本发明所涵盖的范围。
- 步行导航路径规划方法、步行导航方法及导航设备
- 一种海水养殖环境无人巡检船用导航路径规划装置及其路径规划方法