一种表面形貌测量装置及方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及表面检测技术领域,尤其涉及一种表面形貌测量装置及方法。
背景技术
在半导体技术领域中,晶圆级封装(Wafer Level Packaging,WLP)在缩小封装尺寸、节约工艺成本方面相对于传统封装有着显著的优势,WLP将是未来支持IC行业不断发展的主要技术之一。WLP主要设计各种凸块工艺技术,包括Pillar/Gold/Solder Bump、RDL、TSV等技术。为了提升芯片制造的良率,在整个封装工艺过程中都需要对芯片进行外观缺陷检测。常用的外观检测一般包括2D和3D检测,其中2D缺陷检测能发现诸如污染、划痕、颗粒等缺陷。随着工艺控制要求的增加,越来越需要对表面3D特征进行检测,例如Bump高度、RDL厚度、TSV的孔深等。
目前业界实现表面3D测量的方法主要包括激光三角测量、激光共聚焦、干涉测量仪等,其中激光三角测量法可以采用Laser Line进行扫描,结构简单,但速度和精度相对较低;激光共聚焦和干涉测量仪虽然能获得较高的垂向分辨率,但需要进行垂向扫描,检测效率较低,难以满足wafer全片扫描检测的需求。同时,当前的2D检测方法一般采用大NA的显微镜,景深有限,对WLP工艺的凸块检查一般需要多次扫描才能完成芯片的全表面检测,同样存在检测效率问题。
发明内容
(一)要解决的技术问题
本发明实施例提供一种表面形貌测量装置及方法,用以解决现有的芯片表面检测上存在着的精度低、无法实现wafer全片检测,景深有限,检测效率低等问题。
(二)发明内容
本发明实施例提供一种表面形貌测量装置,包括光源单元、分束装置、探测装置和运动台,运动台与探测装置之间还设置有检测台,待检测样品放置于检测台,运动台带动探测装置或者检测台使二者之间产生相对运动;分束装置接收待检测样品的反射光束的光轴与运动平台的法线之间存在夹角θ。
优选的,光源单元包括光源本体以及有第一透镜和第二透镜组成的透镜组,透镜组正对所述分束装置。
优选的,分束装置包括分束器、设置于分束器下方的第三透镜和设置于分束器上方的第四透镜。
优选的,第四透镜上方设有探测器,运动台设置于第三透镜下方。
优选的,第二透镜与分束装置之间还设有起偏镜。
优选的,第四透镜与分束器之间还设有检偏镜。
优选的,第三透镜处还设有环形光源。
一种表面形貌测量方法,其特征在于,使用如权利要求1~7中任意一项所述的所述表面形貌测量装置,包括以下步骤:
步骤一:采集图像;通过运动台带动探测装置或者检测台使二者之间产生相对运动,期间运动台通过其内部的编码尺或控制器触发光源单元、分束装置和探测装置形成的成像系统拍照,触发拍照位置X1,X2,X3,…,Xn,沿扫描方向取像系统的视场FOV
(X
步骤二:通过图像平移获得图像间相同ROI区域。穷变换方法为:
Reigon(j)=Reigon[i-(X
其中为像素在物理空间的等效尺寸;
步骤三:确定图像的清晰度量度,通过以使用拉普拉斯算子能量方法来计算清晰度,公式如下:
步骤四:计算名义离焦量,通过对不同图像间的ROI变换,得到第i张到第I+M张照片的对应ROI的名义离焦量为:
步骤五:二项式拟合得到焦平面位置,对应的ROI相对于理想焦平面的偏差:
步骤六:计算焦离量,通过抛物线模型来计算焦离量,设其二项式系数为a,b,c,通过最小二乘法得,得到最佳聚焦平面-b/2a,进而得到第i个ROI中各像素的离焦量:
步骤七:计算样品的高度数据:
步骤八:计算得到第j个ROI的超景深图像:
Image_C(x,y)=Image(Reigon[MAX(S
优选的,步骤三中也可以采用Brenner梯度函数来评价图像的清晰度。
优选的,步骤六中也可以采用标准的点扩散函数来测最佳聚焦位置,进而得到第i个ROI中各像素的离焦量。
(三)有益效果
本发明实施例提供的一种表面形貌测量装置包括光源单元、分束装置、探测装置和运动台,运动台与探测装置之间还设置有检测台,待检测样品放置于检测台,运动台带动探测装置或者检测台使二者之间产生相对运动;分束装置接收待检测样品的反射光束的光轴与运动平台的法线之间存在夹角θ,通过所拍摄图像前后存在的重叠区域的清晰程度来评估所拍摄图片的离焦量,通过离焦量计算样品表面的立体高度信息;进一步的,通过对重叠区域的清晰程度进一步比较处理,使得清晰度最高的图像区域相互拼接,得到大大超出分束装置实际景深的组合图像,用于对样品表面形貌详细检测。通过分束装置与运动台的倾斜配置和配合,可以实现尺寸大、高度变化范围大的待测样品的表面形貌测量,提高了检测效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
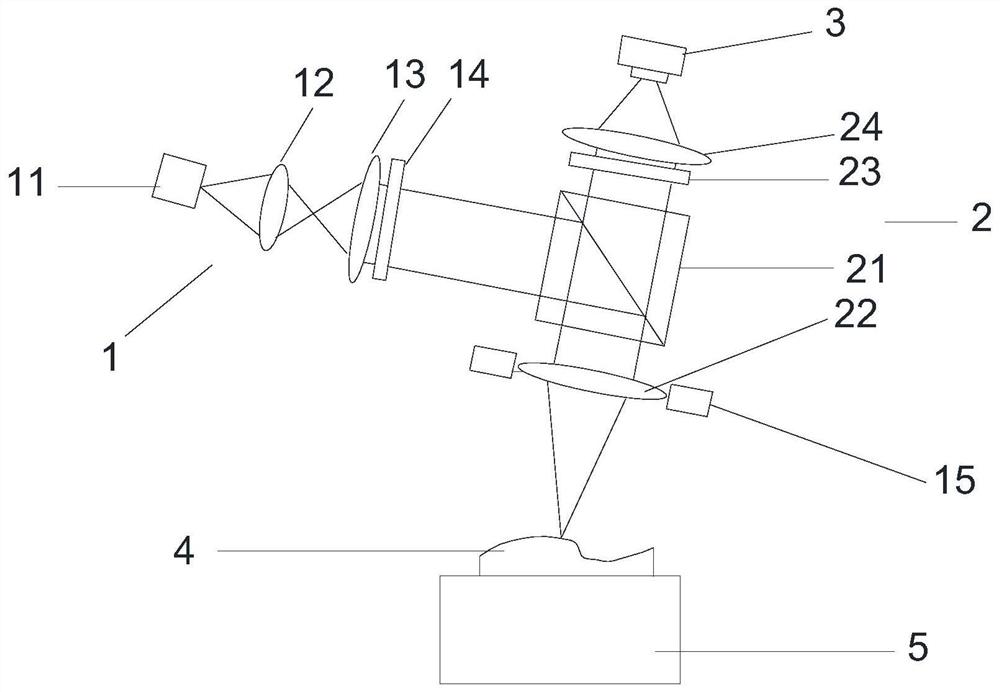
图1是本发明实施例1的一种表面形貌测量装置的结构示意图;
图2是本发明实施例中的实施例1的水平取像示意图;
图3是标识实施例1中不同图像序列ROI的对应关系;
图4是实施例1的离焦量与图像清晰度的关系;
图5是本发明实施例2的一种表面形貌测量装置的结构示意图;
图6是本发明实施例3中的实施例3的ROI分布示意图。
附图标记说明:
1:光源单元; 11:光源本体; 12:第一透镜;
13:第二透镜; 14:起偏镜; 15:环形光源;
2:分束装置; 21:分束器; 22:第三透镜;
23:检偏镜; 24:第四透镜; 3:探测器;
4:待检测样品; 5:运动台。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“第一”“第二”“第三”是为了清楚说明产品部件进行的编号,不代表任何实质性区别。“上”“下”“左”“右”的方向均以附图所示方向为准。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明实施例中的具体含义。
需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在发明实施例中的具体含义。
实施例1。
本实施例提供的一种表面形貌测量装置,如图1和图2所示,包括光源单元1、分束装置2、探测装置和运动台。其中,光源单元1包括光源本体11以及有第一透镜12和第二透镜13组成的透镜组,透镜组正对分束装置2;光源单元1包括光源本体11以及有第一透镜12和第二透镜13组成的透镜组,透镜组正对所述分束装置2;分束装置2包括分束器21、设置于所述分束器21下方的第三透镜2和设置于所述分束器21上方的第四透镜24;运动台与探测装置之间还设置有检测台,待检测样品放置于检测台,运动台带动所述探测装置或者检测台使二者之间产生相对运动;分束装置2接收所述待检测样品的反射光束的光轴与所述运动平台的法线之间存在夹角θ,其工作原理为:使用光轴倾斜放置的定焦成像系统,通过水平运动运动台触发成像系统拍照获取具有多个重复ROI区域的图像以及高精度位置信息,各图像的ROI变换形成多张不同拍照距离下的图像,通过图像清晰度估算对应ROI的离焦量,通过离焦量数据获得高精度的3D形貌信息。与此同时,通过选择最佳图像清晰度图像像素合成超景深的高清晰2D照片。
具体的加检测方法如下:借助上述表面形貌测量装置,通过以下步骤完成检测:
运动台50以一定的速度运动,通过内部的编码尺或控制器触发照明单元10、分束单元20和探测器330形成的成像系统拍照,触发拍照位置X1,X2,X3,…,Xn,沿扫描方向取像系统的视场FOVX,焦深为DOF,相关的参数示意图如图2所示。为了采用聚焦变化模型获取焦面参考位置,需要使离焦量控制在一定范围内,设为γ个焦深范围,采集过程相同区域需要保证有M(M≥3)个图像叠加,则形貌测量系统运行需要满足如下关系:
X
(X
图3给出了图像序列的取像ROI对应关系。图像间相同ROI区域变换通过图像平移获得,相应的变换关系为:
Reigon(j)Reigon[i(X
其中P
图像的清晰度量度可使用多种方法确定,比如可以使用拉普拉斯算子能量方法来计算,
此步骤中也可以采用Brenner梯度函数等方法来评价图像的清晰度。
清晰度信息得到后,通过对不同图像间的ROI变换,得到第i张到第I+M张照片的对应ROI的名义离焦量为S
图4绘制了离焦量与图像清晰度的关系,可采用标准的点扩散函数或者抛物线近似来出测最佳聚焦位置。为了便于描述,这里以抛物线模型来进行介绍。该模型包含二项式系数a,b,c,这些值可以通过最小二乘法得,来进行求解,得到最佳聚焦平面-b/2a,可以得到第i个ROI中各像素的离焦量:
此步骤中也可以采用标准的点扩散函数来测最佳聚焦位置,
进一步获得样品的高度数据:
样品的高度测量范围为:
d=FOV
样品上凸块高度数据进行区域提取、平滑处理,获得凸块的高度侧脸数据和体积测量数据。
其中μ表示投影高度与实际高度的补偿因子,投影高度表示凸块体积与投影距离比值。
针对图像的清晰度量度,对第i张到第I+M张照片以最佳清晰度照片进行合成,得到第j个ROI的超景深图像:
Image_C(x,y)=Image(Reigon[MAX(S
优选的,针对高反光表面、颗粒划痕等特殊形貌检测情况,照明单元可选装起偏镜14、检偏镜23以及环形光源15。具体的,第四透镜24上方设有探测器3,所述运动台设置于所述第三透镜2下方,第二透镜13与所述分束器21之间还设有起偏镜14。第四透镜24与所述分束器21之间还设有检偏镜23,第三透镜2处还设有环形光源15。
实施例2。
本实施例与实施例1的区别仅仅在于成像装置安装在运动台上,样品静止不动,所采用的测量原理同实施例1。
实施例3。
本实施例与实施例1的区别仅仅在于运动台载着样品旋转运动,成像系统静止不动,或者成像系统位于运动台上转动或做旋转运动,而样品不动,所采用的测量原理同实施例1主要区别为图像ROI的变换遵循旋转变换,详见图6。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种微纳金属纤维表面形貌的测量装置及其使用方法和该装置中驱动器运动距离的测量方法
- 一种微纳金属纤维表面形貌的测量装置及其使用方法和该装置中驱动器运动距离的测量方法