一种EGR阀的状态处理方法及装置
文献发布时间:2023-06-19 12:04:09
技术领域
本申请实施例涉及车辆技术领域,尤其涉及一种EGR阀的状态处理方法及装置。
背景技术
自柴油机问世以来,就凭借其良好的动力性、经济性和耐久性等优点在各种动力装置、船舶和车辆上得到日益广泛的应用。而柴油机与同等功率的汽油机相比,微粒和NOx是排放中主要的污染物。
在目前的柴油机NOx排放控制的技术中会经常用到EGR阀,例如,在增压柴油机中,进气管中的平均压力高于排气管中的平均压力,增压柴油机要实现废气再循环(EGR,Exhaust Gas Recirculation),首先要克服压力逆差,将足量的废气送入进气系统。这个废气再循环技术可降低缸内燃烧温度,继而降低NOx排放。随着排放法规的越来越严格,柴油机尾气NOx排放限值的要求越来越苛刻,EGR技术成为柴油机排放控制越来越不可或缺的手段。统计资料指出,传感器和执行器的故障占到控制系统总故障的80%左右。
EGR技术的核心零部件EGR阀,作为高重要度的执行器,其控制复杂、工作环境恶劣,极易发生积碳和结焦等失效问题,导致EGR阀卡滞故障,影响EGR系统生命周期内的正常工作,而在进气系统运行的过程中,是无法判断出EGR阀的状态的,这样就易出现因EGR阀卡滞而造成进气系统无法维持正常运行情况。
发明内容
本申请实施例提供了一种EGR阀的状态处理方法及装置,用于在进行系统运行的过程中对EGR阀的状态做出及时的判断并处理,减少因EGR阀卡滞而造成进气系统无法维持正常运行的情况。
本申请在第一方面提供了一种EGR阀的状态处理方法,包括:
确定EGR阀的目标开度;
获取所述EGR阀的第一开度;
计算所述目标开度与所述第一开度的第一偏差值;
判断所述第一偏差值是否达到设定值;
若是,则根据所述EGR阀的阀门开闭过程进行冲阀,所述冲阀为根据所述EGR阀的阀门开闭过程控制所述EGR阀运动;
根据所述EGR阀的运动方向的轨迹端点位置判断所述EGR阀是否冲阀完成;
若否,则根据所述运动方向的轨迹端点位置控制所述EGR阀的运动状态。
可选的,所述根据所述EGR阀的阀门开闭过程进行冲阀,包括:
当所述EGR阀的阀门为开启过程时,控制所述EGR阀向全关位置运动再控制所述EGR阀反向向全开位置进行冲阀;
当所述EGR阀的阀门为关闭过程时,控制所述EGR阀向全开位置运动再控制所述EGR阀反向向全关位置进行冲阀。
可选的,所述根据所述运动方向的轨迹端点位置控制所述EGR阀的运动状态,包括:
判断所述运动方向的轨迹端点位置是否存在处于全开或全关位置的点,若是,则通过设置的冲阀次数对所述EGR阀进行冲阀;
若否,则确定所述EGR阀防卡滞未完成,并启动故障警示。
可选的,所述根据所述EGR阀的运动方向的轨迹端点位置判断所述EGR阀是否冲阀完成之后,所述处理方法还包括:
若是,则确定所述EGR阀防卡滞完成,停止冲阀。
可选的,所述判断所述第一偏差值是否达到设定值之后,所述处理方法还包括:
若否,则确定所述EGR阀为不卡滞状态。
本申请在第二方面提供了一种EGR阀的状态处理装置,包括:
第一确定单元,用于确定EGR阀的目标开度;
第一获取单元,用于获取所述EGR阀的第一开度;
第一计算单元,用于计算所述目标开度与所述第一开度的第一偏差值;
第一判断单元,用于判断所述第一偏差值是否达到设定值;
第一执行单元,用于当所述第一判断单元确定所述第一偏差值达到设定值时,根据所述EGR阀的阀门开闭过程进行冲阀,所述冲阀为根据所述EGR阀的阀门开闭过程控制所述EGR阀运动;
第二判断单元,用于根据所述EGR阀的运动方向的轨迹端点位置判断所述EGR阀是否冲阀完成;
第二执行单元,用于当所述第二判断单元根据所述EGR阀的运动方向的轨迹端点位置确定所述EGR阀未冲阀完成时,根据所述运动方向的轨迹端点位置控制所述EGR阀的运动状态。
可选的,所述第一执行单元,包括:
第一冲阀模块,用于当所述EGR阀的阀门为开启过程时,控制所述EGR阀向全关位置运动再控制所述EGR阀反向向全开位置进行冲阀;
第二冲阀模块,用于当所述EGR阀的阀门为关闭过程时,控制所述EGR阀向全开位置运动再控制所述EGR阀反向向全关位置进行冲阀。
可选的,所述第二执行单元,包括:
第三判断模块,用于判断所述运动方向的轨迹端点位置是否存在处于全开或全关位置的点;
第四执行模块,用于当所述第三判断模块确定所述运动方向的轨迹端点位置存在处于全开或全关位置的点时,通过设置的冲阀次数对所述EGR阀进行冲阀;
第五执行模块,用于当所述第三判断模块确定所述运动方向的轨迹端点位置不存在处于全开或全关位置的点时,确定所述EGR阀防卡滞未完成,并启动故障警示。
可选的,所述处理装置还包括:
第六执行单元,用于当所述第二判断单元根据所述EGR阀的运动方向的轨迹端点位置确定所述EGR阀冲阀完成时,确定所述EGR阀防卡滞完成,停止冲阀。
可选的,所述处理装置还包括:
第七执行单元,用于当所述第一判断单元确定所述第一偏差值未达到设定值时,确定所述EGR阀为不卡滞状态。
本申请在第三方面提供了一种EGR阀的状态处理装置,包括:
处理器、存储器、输入输出单元、总线;
所述处理器与所述存储器、所述输入输出单元以及所述总线相连;
所述处理器具体执行如下操作:
确定EGR阀的目标开度;
获取所述EGR阀的第一开度;
计算所述目标开度与所述第一开度的第一偏差值;
判断所述第一偏差值是否达到设定值;
若是,则根据所述EGR阀的阀门开闭过程进行冲阀,所述冲阀为根据所述EGR阀的阀门开闭过程控制所述EGR阀运动;
根据所述EGR阀的运动方向的轨迹端点位置判断所述EGR阀是否冲阀完成;
若否,则根据所述运动方向的轨迹端点位置控制所述EGR阀的运动状态。
可选的,所述处理器还用于执行第一方面中的任意可选方案的操作。
从以上技术方案可以看出,本申请实施例具有以下优点:
通过确定EGR阀的目标开度,再获取当前EGR阀的第一开度,根据目标开度与第一开度这两者参数计算出一个偏差值,再判断该偏差值是否达到预先设定好的设定值,若是,则可以根据EGR阀的阀门开闭过程来进行相对应的冲阀操作,冲阀操作后,可以根据EGR阀的运动方向的轨迹端点位置来判断EGR阀是否冲阀完成,若确定未完成,则可以根据该阀门的运动轨迹端点位置来控制EGR阀的运动状态,从而能够在进气系统运行的过程中对EGR阀的状态做出及时的判断和处理,减少因EGR阀卡滞而造成进气系统无法维持正常运行的情况。
附图说明
图1为本申请实施例中EGR阀的状态处理方法的一个实施例流程示意图;
图2为本申请实施例中EGR阀的状态处理方法的另一个实施例流程示意图;
图3为本申请实施例中EGR阀的状态处理装置的一个实施例结构示意图;
图4为本申请实施例中EGR阀的状态处理装置的另一个实施例结构示意图;
图5为本申请实施例中EGR阀的状态处理装置的另一个实施例结构示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的阐述,显然阐述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护范围。
在本实施例中,EGR阀的状态处理方法可在系统实现,可以在服务器实现,也可以在终端实现,具体不做明确限定。为方便描述,本申请实施例使用系统为执行主体举例描述。
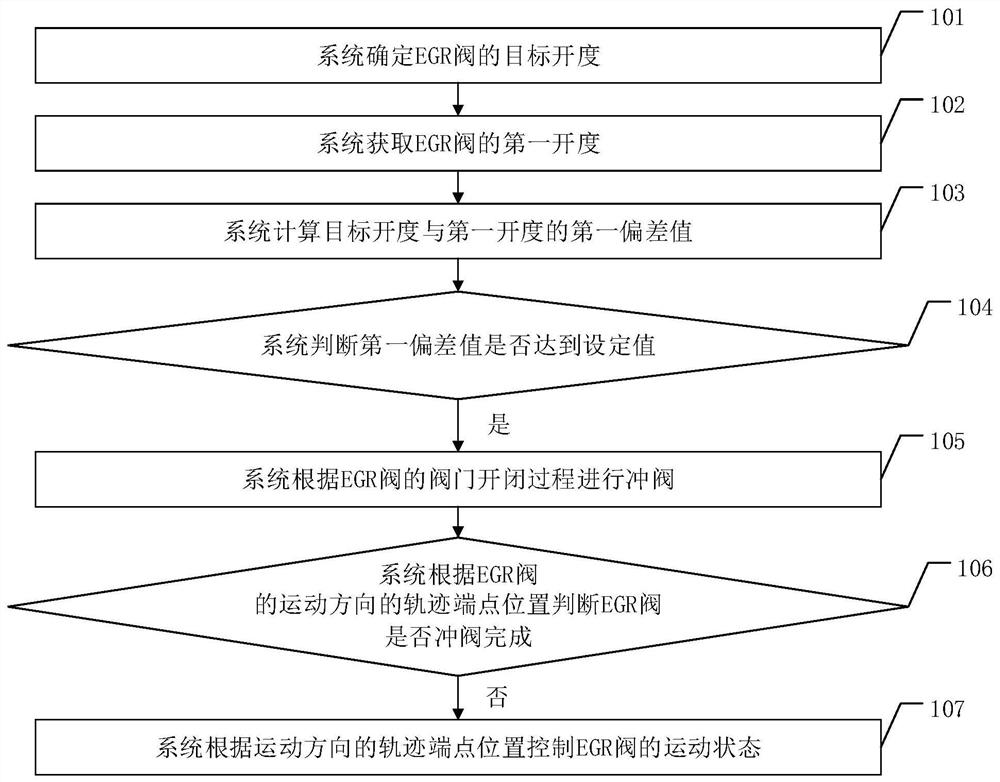
请参阅图1,在本申请实施例中,EGR阀的状态处理方法的一个实施例包括:
101、系统确定EGR阀的目标开度;
在本申请实施例中,系统需要根据设置的参数与实际参数的偏差来确定系统中的EGR阀是否需要进行防卡滞策略,然后,针对需要进行策略的EGR阀进行一定的处理,处理后,再对EGR阀的状态进行二次判断是否还卡滞,若仍旧卡滞,则采取进一步的处理,从而减少EGR阀卡滞的情况。因此在确定系统中的EGR阀是否需要进行防卡滞策略之前,需要确定好EGR阀的目标开度,以作后续判断数据的运算基础。
102、系统获取EGR阀的第一开度;
在步骤101确定了EGR阀的目标开度后,为了确定系统中的EGR阀是否处于卡滞状态,还需要获取到实时的EGR阀的第一开度来作为其中的运算数据,以使得后续能够根据目标开度和第一开度进行运算得到EGR阀是否处于卡滞状态的判断数据。
103、系统计算目标开度与第一开度的第一偏差值;
在系统确定了EGR阀的目标开度以及获取到EGR阀的第一开度的信息后,可以计算出的两者之间的偏差值,再根据该偏差与一定参数的联系来确定当前EGR阀是否需要运行防卡滞策略。计算方式可以为,利用第一开度减去目标开度得到一个偏差值,再将后续的偏差值与设定值进行比较;还可以为系统预先计算出目标开度与某个关联参数的比值,再计算出第一开度与该关联参数的比值,再分别将这两个比值进行相减得到偏差值,再将后续的偏差值与设定值进行比较。具体的计算方式在此处不做限定。
104、系统判断第一偏差值是否达到设定值;若是,则执行步骤105;
为了确定系统是否针对EGR阀启动防卡滞策略,系统需要判断通过步骤103得到的第一偏差值是否达到设定值,若是该第一偏差值达到了设定值,则执行步骤105。
105、系统根据EGR阀的阀门开闭过程进行冲阀;
当系统确定第一偏差值达到设定值时,需要根据EGR阀的阀门开闭过程进行冲阀。此处所说的冲阀实际上为防卡滞策略,即是指根据EGR阀的阀门开闭过程控制EGR阀运动,例如,当EGR阀的阀门为开启的过程时,就可以控制EGR阀以最大的占空比先向全关再向全开的位置拉动阀片;当EGR阀的阀门为关闭的过程时,就可以控制EGR阀以最大的占空比先向全开再向全关的位置拉动阀片。
106、系统根据EGR阀的运动方向的轨迹端点位置判断EGR阀是否冲阀完成;若否,则执行步骤107;
在系统根据EGR阀的阀门开闭过程来控制EGR阀以最大的占空比反向拉动阀片后,需要进一步判断EGR阀是否还处于需要开启防卡滞策略的状态,例如,系统需要从当前EGR阀的运动轨迹的两个端点位置来判断EGR阀是否已经能够既能回到全开位置,也能回到全关位置,若是能够回到全开也能回到全关位置,则证明系统冲阀成功,若否,则证明系统未冲阀成功,执行步骤107。
107、系统根据运动方向的轨迹端点位置控制EGR阀的运动状态。
当系统根据EGR阀的运动方向的轨迹端点位置确定EGR阀未冲阀完成后,根据运动方向的轨迹端点位置控制EGR阀的运动状态。
在本申请实施例中,系统可以通过确定EGR阀的目标开度,再获取当前EGR阀的第一开度,根据目标开度与第一开度这两者参数计算出一个偏差值,再判断该偏差值是否达到预先设定好的设定值,若是,则可以根据EGR阀的阀门开闭过程来进行相对应的冲阀操作,冲阀操作后,可以根据EGR阀的运动方向的轨迹端点位置来判断EGR阀是否冲阀完成,若确定未完成,则可以根据该阀门的运动轨迹端点位置来控制EGR阀的运动状态,从而能够在进气系统运行的过程中对EGR阀的状态做出及时的判断和处理,减少因EGR阀卡滞而造成进气系统无法维持正常运行的情况。
请参阅图2,在本申请实施例中,EGR阀的状态处理方法的另一个实施例包括:
201、系统确定EGR阀的目标开度;
202、系统获取EGR阀的第一开度;
203、系统计算目标开度与第一开度的第一偏差值;
204、系统判断第一偏差值是否达到设定值;若是,则执行步骤205,若否,则执行步骤206;
本实施例中的步骤201与204与前述实施例中步骤101与104类似,此处不再赘述。
205、系统当EGR阀的阀门为开启过程时,控制EGR阀向全关位置运动再控制EGR阀反向向全开位置进行冲阀;当EGR阀的阀门为关闭过程时,控制EGR阀向全开位置运动再控制EGR阀反向向全关位置进行冲阀;
当系统确定第一偏差值达到设定值时,系统会根据EGR阀的阀门开闭过程来控制EGR阀的运动。
206、系统确定EGR阀为不卡滞状态;
当系统确定第一偏差值未达到设定值时,确定EGR阀为不卡滞状态。
207、系统根据EGR阀的运动方向的轨迹端点位置判断EGR阀是否冲阀完成;若是,则执行步骤208,若否,则执行步骤209;
本实施例中的步骤207与前述实施例中步骤106类似,此处不再赘述。
208、系统确定EGR阀防卡滞完成,停止冲阀;
当系统根据EGR阀的运动方向的轨迹端点位置确定EGR阀冲阀完成时,确定EGR阀防卡滞完成,停止冲阀。
209、系统判断运动方向的轨迹端点位置是否存在处于全开或全关位置的点,若是,则执行步骤210;若否,则执行步骤211;
当系统根据EGR阀的运动方向的轨迹端点位置确定EGR阀冲阀未完成时,判断运动方向的轨迹端点位置是否存在处于全开或全关位置的点,从而可以根据判断结果进行后续的控制EGR阀的运动状态的操作。
210、系统通过设置的冲阀次数对EGR阀进行冲阀;
当系统确定运动方向的轨迹端点位置存在全开或全关位置的点时,通过设置的冲阀次数对EGR阀进行冲阀。
211、系统确定EGR阀防卡滞未完成,并启动故障警示。
当系统确定运动方向的轨迹端点位置不存在全开或全关位置的点时,确定EGR阀防卡滞未完成,并启动故障警示。
在本申请实施例中,系统可以通过EGR阀的运动方向的轨迹端点位置判断EGR阀是否冲阀完成,当确定没有冲阀完成时,除了可以确定EGR阀防卡滞未完成之外,同时还可以启动故障警示,使得工作人员可以及时发现EGR阀防卡滞未完成,在一定程度上节约了人工成本。
上面对本申请实施例中的EGR阀的状态处理方法进行了描述,那么,下面对本申请实施例中的EGR阀的状态处理装置进行描述:
请参阅图3,在本申请实施例中,EGR阀的状态处理装置的一个实施例包括:
第一确定单元301,用于确定EGR阀的目标开度;
第一获取单元302,用于获取EGR阀的第一开度;
第一计算单元303,用于计算目标开度与第一开度的第一偏差值;
第一判断单元304,用于判断第一偏差值是否达到设定值;
第一执行单元305,用于当第一判断单元304确定第一偏差值达到设定值时,根据EGR阀的阀门开闭过程进行冲阀,该冲阀为根据EGR阀的阀门开闭过程控制EGR阀运动;
第二判断单元306,用于根据EGR阀的运动方向的轨迹端点位置判断EGR阀是否冲阀完成;
第二执行单元307,用于当第二判断单元306根据EGR阀的运动方向的轨迹端点位置确定EGR阀未冲阀完成时,根据运动方向的轨迹端点位置控制EGR阀的运动状态。
在本申请实施例中,第一确定单元301确定了EGR阀的目标开度之后,第一获取单元302获取EGR阀的第一开度,然后通过第一计算单元303计算目标开度与第一开度的第一偏差值,在第一判断单元304确定第一偏差值达到设定值时,第一执行单元305根据EGR阀的阀门开闭过程进行冲阀,接着,第二判断单元306根据EGR阀的运动方向的轨迹端点位置判断EGR阀是否冲阀完成,若否,则第二执行单元307根据运动方向的轨迹端点位置控制EGR阀的运动状态,从而能够针对EGR阀的状态做出及时处理,减少因EGR阀卡滞而造成进气系统无法维持正常运行的情况。
请参阅图4,在本申请实施例中,EGR阀的状态处理装置的另一实施例包括:
第一确定单元401,用于确定EGR阀的目标开度;
第一获取单元402,用于获取EGR阀的第一开度;
第一计算单元403,用于计算目标开度与第一开度的第一偏差值;
第一判断单元404,用于判断第一偏差值是否达到设定值;
第一执行单元405,用于当第一判断单元404确定第一偏差值达到设定值时,根据EGR阀的阀门开闭过程进行冲阀,该冲阀为根据EGR阀的阀门开闭过程控制EGR阀运动;
第七执行单元406,用于当第一判断单元404确定第一偏差值未达到设定值时,确定EGR阀为不卡滞状态;
第二判断单元407,用于根据EGR阀的运动方向的轨迹端点位置判断EGR阀是否冲阀完成;
第六执行单元408,用于当第二判断单元408根据EGR阀的运动方向的轨迹端点位置确定EGR冲阀完成时,确定EGR阀防卡滞完成,停止冲阀;
第二执行单元409,用于当第二判断单元408根据EGR阀的运动方向的轨迹端点位置确定EGR阀未冲阀完成时,根据运动方向的轨迹端点位置控制EGR阀的运动状态。
在本申请实施例中,第一执行单元405可以包括第一冲阀模块4051以及第二冲阀模块4052。
第一冲阀模块4051用于当EGR阀的阀门为开启过程时,控制EGR阀向全关位置运动再控制EGR阀反向向全开位置进行冲阀;
第二冲阀模块4052用于当EGR阀的阀门为关闭过程时,控制EGR阀向全开位置运动再控制EGR阀反向向全关位置进行冲阀。
在本申请实施例中,第二执行单元409可以包括第三判断模块4091、第四执行模块4092以及第五执行模块4093。
第三判断模块4091用于判断运动方向的轨迹端点位置是否存在处于全开或全关位置的点;
第四执行模块4092用于当第三判断模块4091确定运动方向的轨迹端点位置存在处于全开或全关位置的点时,通过设置的冲阀次数对EGR阀进行冲阀;
第五执行模块4093用于当第三判断模块4091确定运动方向的轨迹端点位置不存在处于全开或全关位置的点时,确定EGR阀防卡滞未完成,并启动故障警示。
上述实施例中,各个单元及模块的功能与图2所示实施例中的步骤对应,此处不再赘述。
下面对本申请实施例中的EGR阀的状态处理装置进行详细描述,请参阅图5,在本申请实施例中EGR阀的状态处理装置另一实施例包括:
处理器501、存储器502、输入输出单元503、总线504;
处理器501与存储器502、输入输出单元503以及总线504相连;
处理器501具体执行如下操作:
确定EGR阀的目标开度;
获取EGR阀的第一开度;
计算目标开度与第一开度的第一偏差值;
判断第一偏差值是否达到设定值;
若是,则根据EGR阀的阀门开闭过程进行冲阀,冲阀为根据EGR阀的阀门开闭过程控制EGR阀运动;
根据EGR阀的运动方向的轨迹端点位置判断EGR阀是否冲阀完成;
若否,则根据运动方向的轨迹端点位置控制EGR阀的运动状态。
本实施例中,处理器501的功能与前述图1至图4所述实施例中的步骤对应,此处不再赘述。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统,装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
- 一种EGR阀的状态处理方法及装置
- 一种任务状态处理方法、装置、系统及存储介质