轨道货架、移位式自动仓储物流系统及其输送方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及物流仓储技术领域,具体涉及一种轨道货架、移位式自动仓储物流系统及其输送方法。
背景技术
《仓库输送系统及其输送方法》ZL201611050224.9发明专利曾经公布了一种由水平轨道和与水平轨道相连通的多个垂直轨道以及在轨道上行驶的货厢列车组成的现代仓库输送系统及其输送方法的技术,在大型农产品以及成组货物自动存储方面比较实用。但是,该系统在进出库频率较高时,转移到横轨的列车就需要排队等待,当用于散件货物存取时,存取输送效率不能尽如人意。其他的自动仓形式,多是货架固定,由传动带和升降机传输货物到制定位置,存在建造成本高,空间利用率低的问题。也有通过AGV(AutomatedGuided Vehicle,简称AGV)自动车移动货架进行货物存取的形式,但是由于要给AGV自动车留出巷道,运行效率和仓库空间利用率依然存明显在不足。
发明内容
为克服现有技术所存在的缺陷,现提供一种轨道货架、移位式自动仓储物流系统及其输送方法,以更利于散件、小件大批量快速存取和储存的自动化仓储物流系统,提高存取效率、节省空间、节约人工、保障安全。
为实现上述目的,提供一种轨道货架,包括:
矩形地轨结构,包括同心设置的内圈轨道和外圈轨道,所述内圈轨道和所述外圈轨道分别具有沿第一水平方向设置的两长边段和沿第二水平方向设置的两短边段,所述短边段连接于两所述长边段的两端之间,所述第二水平方向垂直于所述第一水平方向;
多个储物架,所述储物架具有在所述第一水平方向上相对的第一侧和第二侧和在所述第二水平方向上相对的第三侧和第四侧,所述储物架的第一侧和第二侧分别安装有用于行走于所述内圈轨道和所述外圈轨道的长边段的第一滚轮,所述储物架的第三侧和第四侧分别安装有用于行走于所述内圈轨道和所述外圈轨道的短边段的第二滚轮,至少两所述储物架之间形成有一间隔,所述间隔的长度适配于一所述储物架的长度;
用于推动所述储物架沿所述长边段行走一预设行程的第一驱动装置,每一所述长边段安装有所述第一驱动装置;
用于推动所述储物架沿所述短边段行走一所述预设行程的第二驱动装置,每一所述短边段按照有所述第二驱动装置;以及
第一控制器,连接于所述第一驱动装置和所述第二驱动装置,在所述第二滚轮行走至所述长边段的端部时,所述第一控制器关闭所述第一驱动装置并开启所述第二驱动装置以令所述储物架沿所述短边段行走,在所述第一滚轮行走至所述短边段的端部时,所述第一控制器关闭所述第二驱动装置并开启所述第一驱动装置以令所述储物架沿所述长边段行走。
进一步的,所述第一滚轮内侧分别形成有限位轮缘,所述内圈轨道的长边段与所述外圈轨道的短边段之间安装有用于支撑所述第二滚轮的限位轮缘的第一支承板,在所述储物架行走至所述长边段的端部时,所述第一支承板支撑于所述储物架的悬空一侧的第二滚轮。
进一步的,所述第二滚轮的内侧分别形成有限位轮缘,所述内圈轨道的短边段与所述外圈轨道的长边段之间安装有形成有用于支撑所述第一滚轮的限位轮缘的第二支承板,在所述储物架行走至所述短边段的端部时,所述第二支承板支撑于所述储物架的悬空一侧的第一滚轮。
进一步的,还包括架设于所述储物架的上方的矩形吊轨,所述矩形吊轨与所述内圈轨道同心设置,所述矩形吊轨的底部形成有滑槽,所述滑槽沿所述矩形吊轨的长度方向设置一圈,所述储物架的顶部连接有导向杆,所述导向杆的顶部滑设于所述滑槽中。
进一步的,所述矩形吊轨设置于所述外圈轨道和所述内圈轨道的中部。
进一步的,所述内圈轨道的长边段与所述外圈轨道的长边段之间的间距适配于所述储物架的第三侧的第二滚轮与所述储物架的第四侧的第二滚轮之间的轮距。
进一步的,所述内圈轨道的短边段与所述外圈轨道的短边段之间的间距适配于所述储物架的第一侧的第一滚轮与所述储物架的第二侧的第一滚轮之间的轮距。
本发明提供一种移位式自动仓储物流系统,包括:
直线交叉带分拣机;
导轨组件,包括同向设置的三根导轨,所述直线交叉带分拣机的多个分拣口沿所述导轨的长度方向设置;
电动传送带,滑设于所述导轨组件的靠近所述直线交叉带分拣机的一侧的一导轨;
电动堆栈仓,滑设于所述导轨组件的中间的一导轨;
安装于所述导轨组件的远离所述直线交叉带分拣机的一侧的货仓,包括多个轨道货架;
用于将所述电动堆栈仓中的货物存放于所述轨道货架的储物架内或调取所述储物架内的货物至所述电动堆栈仓中的存取机构,滑设于所述导轨组件的靠近所述货仓的一侧的一导轨;以及
第二控制器,连接于所述直线交叉带分拣机、所述电动传送带、所述电动堆栈仓、所述存取机构。
本发明提供一种移位式自动仓储物流系统的输送方法,包括以下步骤:
第二控制器启动直线交叉带分拣机,使得所述直线交叉带分拣机将待分拣的货物分别输送至所述直线交叉带分拣机的多个分拣口;
第二控制器控制电动传送带、电动堆栈仓移动至所述直线交叉带分拣机的对应的分拣口,所述电动传送带将所述分拣口的货物输送至所述电动堆栈仓中;
在所述货物输送至所述电动堆栈仓中后,所述第二控制器生成入库信号并将所述入库信号发送至货仓的一轨道货架的第一控制器;
所述第一控制器启动所述轨道货架的多个第一驱动装置和多个第二驱动装置,使得所述轨道货架的一储物架停泊于接货点;
在一所述储物架停泊于所述接货点后,所述存取机构将所述电动堆栈仓中的所述货物取出并存放于所述接货点的所述储物架中;
在货物存放于储物架后,所述第二控制器接收提货指令、基于所述提货指令生成出库信号并将所述出库信号发送至存放所述提货指令的货物的轨道货架的第一控制器;
所述第一控制器启动所述轨道货架的多个第一驱动装置和多个第二驱动装置,使得存放所述提货指令的货物的所述储物架停泊于接货点;
在存放所述提货指令的货物的所述储物架停泊于接货点后,所述存取机构将停泊于所述接货点的所述储物架内的货物取出并放置于所述电动堆栈仓中;
在所述货物放置于所述电动堆栈仓中后,所述第二控制器控制放置有所述货物的所述电动堆栈仓移动至提货点。
本发明的有益效果在于,本发明的轨道货架用于存放货物,使得货物存放整齐且进出分拣高效,而且轨道货架在行进过程中实现储物架的内外侧、前后端的转换,使得货物的存取方便且高效,无论是从储物架的内侧、外侧、前端或后端都能存取货物,且方便快捷。本发明的轨道货架改变传统单纯轨道、圆形轨道或椭圆轨道,以矩形地轨结构为最小运营单元,自由组合、搭配,集中管理,灵活调度,打破了传统的储物先存后取的技术壁垒。此外,本发明的轨道货架的每一个储物架独立行走,更利于散件、小件大批量快速存取和储存的自动化仓储物流系统,提高存取效率、节省空间、节约人工、保障安全。
附图说明
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
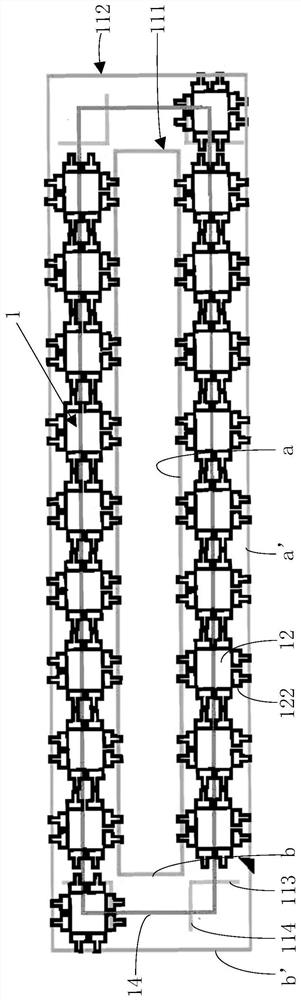
图1为本发明实施例的轨道货架的结构示意图。
图2为本发明实施例的轨道货架的一端的结构示意图。
图3为本发明实施例的矩形地轨结构的结构示意图。
图4为本发明实施例的储物架的结构示意图。
图5为本发明实施例的第二滚轮的结构示意图。
图6为本发明实施例的第二滚轮的侧视图。
图7为本发明实施例的移位式自动仓储物流系统的结构示意图。
图8为本发明实施例的存取机构的结构示意图。
具体实施方式
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
参照图1至图8所示,本发明提供了一种轨道货架,包括:矩形地轨结构11、多个储物架12、多个第一驱动装置、多个第二驱动装置和第一控制器。
具体的,矩形地轨结构11包括内圈轨道111和外圈轨道12。其中,内圈轨道111和外圈轨道12同心设置。
内圈轨道111和外圈轨道12分别呈矩形。内圈轨道111和外圈轨道12分别具有沿第一水平方向设置的两长边段和沿第二水平方向设置的两短边段,所述短边段连接于两所述长边段的两端之间,所述第二水平方向垂直于所述第一水平方向。
在本实施例中,内圈轨道111具有沿第一水平方向设置的两长边段a和沿第二水平方向设置的两短边段b。短边段b连接于两长边段a的两端之间。外圈轨道12分别具有沿第一水平方向设置的两长边段a’和沿第二水平方向设置的两短边段b’。短边段b’连接于两长边段’的两端之间。
储物架12具有在第一水平方向上相对的第一侧和第二侧和在第二水平方向上相对的第三侧和第四侧。储物架的第一侧和第二侧分别安装有用于行走于所述内圈轨道和外圈轨道的短边段的第一滚轮121。储物架的第三侧和第四侧分别安装有用于行走于内圈轨道和外圈轨道的长边段的第二滚轮122。至少有两个储物架之间形成有一间隔,所述间隔的长度适配于一储物架的长度,即两个储物架之间形成有可容纳一储物架的间隔。
具体的,储物架12的底部安装有第一滚轮121和第二滚轮122。其中,第一滚轮仅用于行走于内圈轨道111和外圈轨道12的短边段。第二滚轮仅用于行走于内圈轨道111和外圈轨道12的长边段。第一滚轮与第二滚轮,二者在同一时间内只有一个处于行走。
第一控制器连接于第一驱动装置和第二驱动装置。
第一驱动装置用于推动储物架沿长边段行走一预设行程。第一驱动装置安装于矩形地轨结构11的长边段。具体的,第一驱动装置安装于矩形地轨结构11的外圈轨道和内圈轨道的长边段之间。每个长边段之间安装有第一驱动装置。在本实施例中,每个长边段之间安装有多个第一驱动装置,多个第一驱动装置沿矩形地轨结构11的长度方向连续布设。
第二驱动装置用于推动所述储物架沿所述短边段行走一所述预设行程。第二驱动装置安装于矩形地轨结构11的短边段。具体的,第二驱动装置安装于矩形地轨结构11的外圈轨道和内圈轨道的短边段之间。每个短边段之间安装有第二驱动装置。在本实施例中,每个短边段之间安装有多个第二驱动装置,多个第二驱动装置沿矩形地轨结构11的长度方向连续布设。
在本发明的轨道货架的矩形地轨结构的外圈轨道和内圈轨道之间形成一环形安装空间,环形安装空间划分了多格空间单元。多格空间单元沿矩形地轨结构的周向方向设置。每一格空间单元中安装有第一驱动装置或第二驱动装置。具体的,在长边段内的多格空间单元中安装有第一驱动装置,而在短边段内的多格空间单元中安装的则是第二驱动装置。储物架在一格空间单元中的第一驱动器或第二驱动器的间隙推力的作用下进入下一格空间单元,然后在下一格空间单元内的第一驱动装置或第二驱动装置的间隙推力的作用下,继续前进。其中,第一驱动装置的推力方向与长边段的长度方向同向设置,第二驱动装置的推力方向沿短边段的长度方向同向设置。在本实施例中,第一驱动装置的推力方向与第二驱动装置的推力方向垂直设置。在矩形地轨结构的拐角位置,通过第一驱动装置与第二驱动装置的推力方向转换,从而实现储物架在矩形轨道结构上的原地垂直换向。
参阅图1和图2所示,当第二滚轮行走于一长边段(即第一驱动装置推动储物架沿长边段的长度方向行走),且在第二滚轮行走至长边段的端部(图2所示状态)时,第一控制器关闭第一驱动装置,再开启第二驱动装置,使得储物架在不转动的情况下沿短边段行走,第一滚轮行走于短边段,实现储物架在矩形地轨结构的端部原地垂直换向,而无需转动转向。当第一滚轮行走于短边段,且在第一滚轮行走至短边段的端部时,第一控制器关闭第二驱动装置,再开启第一驱动装置,使得第一驱动装置推动储物架沿长边段行走,第二滚轮行走于矩形地轨结构的另一长边段,进而实现了储物架的原先的内侧(面向内圈轨道的一侧)转换为外侧(面向外圈轨道的一侧);另一方面,在储物架行走于短边段时又能实现储物架的前端和后端(在本实施例中,前端和后端是指在储物架行进方向上的“前”和“后”)的货物存取,使得储物架在四个侧面都能实现存取货物,存取方式灵活、方便且高效。
本发明的轨道货架在行进过程中实现储物架的内外侧、前后端的转换,使得货物的存取方便且高效,无论是从储物架的内侧、外侧、前端或后端都能存取货物,且方便快捷。本发明的轨道货架改变传统单纯轨道、圆形轨道或椭圆轨道,以矩形地轨结构为最小运营单元,自由组合、搭配,集中管理,灵活调度,打破了传统的储物先存后取的技术壁垒。此外,本发明的轨道货架的每一个储物架独立行走,更利于散件、小件大批量快速存取和储存的自动化移位式自动仓储物流系统,提高存取效率、节省空间、节约人工、保障安全。
在本实施例中,储物架呈长方体,储物架的四个侧面均为敞开侧面。具体的,储物架12具有在第一水平方向上相对的第一侧(即储物架的前端)和第二侧(即储物架的后端)、以及在第二水平方向上相对的第三侧和第四侧。如图4所示,储物架包括一矩形底座和竖设于矩形底座的拐角部的四立柱。在本实施例中,矩形底座呈正方形。四立柱之间连接有多层置物格栅。
作为一种较佳的实施方式,电动堆栈仓包括堆栈仓本体和滑设于导轨3的电动承台。其中,堆栈仓本体的结构与储物架的结构相同,故,堆栈仓本体的具体结构在此不再赘述。电动承台的底部安装有滚轮,电动承台安装有驱动电机,驱动电机传动连接于滚轮。堆栈仓本体安装于电动承台上。
第一滚轮和第二滚轮安装于矩形底座的底部。具体的,矩形底座的相对的第一侧和第二侧分别可转动地安装有多个第二滚轮122,矩形底座的相对的第三侧和第四侧分别可转动地安装有多个第一滚轮121。参阅图2所示状态,多个第二滚轮122分别可转动地安装于储物架12的第三侧(即储物架的内侧)和第四侧(即储物架的外侧)。
第一驱动装置和第二驱动装置驱动储物架间隙式位移。第一驱动装置和第二驱动装置为气动驱动装置、液压驱动装置、或电动驱动装置。在本实施例中,第一驱动装置和第二驱动装置为双出杆液压油缸。作为一种较佳的实施方式,双出杆液压油缸角度可翻转地安装于外圈轨道和内圈轨道之间。当储物架放置于一格空间单元内,这一格空间单元内的双出杆液压油缸对储物架施加向前推力,使得储物架进入下一格空间单元内。在第一控制器的控制下,每次驱动储物架移动一个车厢的距离或者移动一个车厢加一个间隔的距离。在矩形地轨结构内安装储物架时,必须至少保留一个储物架的位置不安放储物架。第一驱动装置和第二驱动装置分可以实现双向驱动。
作为一种较佳的实施方式,第一驱动电机和第二驱动电机为步进电机。第一驱动电机和第二电机为正反转电机,以实现储物架的前进和后退的双向驱动。
作为一种较佳的实施方式,第一滚轮121和第二滚轮122的内侧分别形成有限位轮缘c。在一些实施例中,第一滚轮和第二滚轮行走于矩形地轨结构上。矩形地轨结构安装于一平台上,平台支撑于限位轮缘,即矩形地轨结构的高度等于限位轮缘与第一滚轮或第二滚轮的直径之差。在本实施例中,内圈轨道111的长边段a与外圈轨道12的短边段b’之间安装有用于支撑所述第二滚轮122的限位轮缘c的第一支承板114。内圈轨道111的短边段b与外圈轨道12的长边段a’之间安装有形成有用于支撑所述第一滚轮121的限位轮缘c的第二支承板113。第一支承板和第二支承板用于延续内圈轨道,在储物架行进至矩形地轨结构的端部时,第一支承板和第二支承板用于支撑于储物架的第一滚轮和第二滚轮,避免储物储物架倾覆。
参阅图2,储物架在第一驱动装置的驱动下行进至矩形地轨结构的长边段的端部,储物架的外侧(背向内圈轨道的一侧)的第二滚轮行走外圈轨道上,储物架的内侧(面向内圈轨道的一侧)的第二滚轮悬空设置,此时,第一支承板114支撑于储物架的内侧的第二滚轮的限位轮缘,第二支承板113则支撑于储物架的面向内圈轨道的短边段的一侧的第一滚轮的限位轮缘。当第一驱动装置关闭,第二驱动装置开启后,第二驱动装置推动储物架,使得储物架的一侧的第一滚轮行走于外圈轨道的短边段,而储物架的另一侧的第一滚轮行走于第二支承板上。
作为一种较佳的实施方式,本发明的轨道货架还包括架设于储物架12的上方的矩形吊轨14。矩形吊轨14与内圈轨道111同心设置。矩形吊轨14的底部形成有滑槽。滑槽沿矩形吊轨14的长度方向设置一圈。储物架12的顶部连接有导向杆13。导向杆13的顶部滑设于滑槽中。
在一些实施方式中,导向杆的顶部铰接有万向球,万向球容置于滑槽中。滑槽的槽口的相对两侧形成有限位翼缘,导向杆的顶端穿设于滑槽的槽口的两侧的限位翼缘之间且连接于容置于滑槽内的万向球。
在本实施例中,矩形吊轨14设置于外圈轨道12和所述内圈轨道111的中部。
本发明提供一种移位式自动仓储物流系统,包括:货仓1、直线交叉带分拣机2、导轨组件,电动堆栈仓5、存取机构6和第二控制器。
本发明的移位式自动仓储物流系统的直线交叉带分拣机具有双向运行,任意位置动态分流、合流、节流、截流,智能化程度远高于传统的皮带线和辊筒线,对流量适应能力和处理能力大大提高。
导轨组件包括同向设置的三根导轨,具体的,直线交叉带分拣机2的多个分拣口沿导轨组件的长度方向设置。
导轨组件的靠近分拣口的一侧的一根导轨上可移动地安装有多个电动传送带4。
导轨组件的中间的一根导轨3上可移动地安装多个电动堆栈仓5。具体的,电动堆栈仓包括堆栈仓本体和电动移动承台。其中,导轨3上安装有多个电动移动承台,堆栈仓本体安装于电动移动承台。电动堆栈仓作为临时周转存放货物。
货仓设置于导轨组件的远离直线交叉带分拣机的一侧。货仓1包括多个轨道货架11。多个轨道货架较佳的沿一水平方向间隔布设。
导轨组件的靠近货仓的一侧的一根导轨上可移动地安装有多根存取机构6。
存取机构6用于将电动堆栈仓5中的货物存放于轨道货架11的储物架12内或调取储物架12内的货物至电动堆栈仓5中。存取机构6安装于导轨和货仓1之间。在本实施例中,存取机构包括伸缩式滚筒输送机61、支承架62和提升装置。
具体的,支承架滑设于导轨组件的靠近货仓的一侧的一根导轨上。在一些实施例中,导轨上安装有电动承台,电动承台的底部安装有滚轮,电动承台安装有驱动电机,驱动电机传动连接于滚轮。支承架安装于电动承台上。第二控制器通过控制电动承台的驱动电机的正反转以令支承架沿导轨的长度方向作往返移动。支承架包括两立柱,两立柱的相对侧形成有竖向的滑槽。伸缩式滚筒输送机设置于两立柱之间。伸缩式滚筒输送机沿水平方向设置。伸缩式滚筒输送机的相对的两端分别对准货仓和直线交叉带分拣机。提升装置安装于立柱上且连接于伸缩式滚筒输送机。提升装置用于沿竖直方向提升和下降伸缩式滚筒输送机。提升装置为电动液压千斤顶。
第二控制器连接于直线交叉带分拣机2、电动传送带4、电动堆栈仓的电动移动承台、存取机构6。第二控制器信号连接于存取机构的伸缩式滚筒输送机、驱动电机和提升装置。
本发明的移位式自动仓储物流系统的存取机构存取货物时,第二控制器控制支承架下的电动承台的驱动电机、电动堆栈仓和货仓的相应的一轨道货架,使得存取机构的伸缩式滚筒输送机的两端分别对准于一电动堆栈仓和停泊于货仓的接货点的一轨道货架。伸缩式滚筒输送机具有相对的输入端和输出端。在将电动堆栈仓的货物取出并放入轨道货架上时,第二控制器控制伸缩式滚筒输送机的输入端伸长并伸至电动堆栈仓的堆栈仓本体的置物格栅的下方,同时伸缩式滚筒输送机的输出端伸长并伸至储物架的置物格栅的下方。第二控制器控制提升装置提升伸缩式滚筒输送机,使得伸缩式滚筒输送机的输入端抵靠于堆栈仓本体的置物格栅的底部且伸缩式滚筒输送机的输入端的一滚筒穿过置物格栅的空隙抵靠于堆栈仓本体的置物格栅的货物、伸缩式滚筒输送机的输出端抵靠于储物架的置物格栅的底部。第二控制器启动伸缩式滚筒输送机,伸缩式滚筒输送机的滚筒转动将置物格栅上的货物从电动堆栈仓中取出并输送至轨道货架的储物架的置物格栅上,完成货物存放。反之,相同的原理,则是从轨道货架的储物架的置物格栅将货物提取并放置于电动堆栈仓的堆栈仓本体的置物格栅上,完成货物提取。
本发明提供一种移位式自动仓储物流系统的输送方法,包括以下步骤货物存放和货物提取。
具体的,货物存放步骤包括步骤S1~步骤S5;货物提取步骤包括步骤S6~步骤S9。
S1:第二控制器启动直线交叉带分拣机2,使得直线交叉带分拣机2将待分拣的货物分别输送至直线交叉带分拣机2的多个分拣口。
S2:第二控制器控制电动传送带4、电动堆栈仓5、存取机构6分别移动至直线交叉带分拣机的对应的分拣口,电动传送带4将分拣口的货物输送至电动堆栈仓5中。
S3:在货物输送至电动堆栈仓5中后,第二控制器生成入库信号并将入库信号发送至货仓1的一轨道货架11的第一控制器。
S4:第一控制器启动轨道货架11的多个储物架12的第一驱动装置和第二驱动装置,使得一个储物架12停泊于接货点。
S5:在一个储物架12停泊于所述接货点后,第二控制器控制存取机构6将电动堆栈仓5中的货物取出并存放于接货点的储物架12中。
在本实施例中,当有货物需要入库存储时,将货物放置于直线交叉带分拣机上。货物的条形码在直线交叉带分拣机上被扫码识别并发送至第二控制器,然后第二控制器根据编码查询的仓位码自动送往对应的电动传送带。电动传送带把货物送入对应的电动堆栈仓中。在扫码识别的同时,第二控制器控制对应电动堆栈仓的电动移动承台移动至电动传送带的输出端。电动堆栈仓接到电动传送带的输出端的货物后,第二控制器发送入库信号通知存取机构接货和货仓的对应的轨道货架的第一控制器,待对应的轨道货架的储物架到位后,通过电子标签识别并且在第一控制器中写入存货信息,同时将货物移送到轨道货架的指定位置。
S6:在货物存放于储物架12后,第二控制器接收提货指令、基于提货指令生成出库信号并将出库信号发送至存放提货指令的货物的轨道货架11的第一控制器。
S7:第一控制器启动轨道货架11的多个储物架12的第一驱动装置和第二驱动装置,使得存放所提货指令的货物的储物架12停泊于接货点。
S8:在存放提货指令的货物的储物架12停泊于接货点后,第二控制器控制存取机构6将停泊于接货点的储物架12内的货物取出并放置于电动堆栈仓5中。
S9:在货物放置于电动堆栈仓5中后,第二控制器控制放置有货物的电动堆栈仓5的电动移动承台移动至提货点。
当有货需要出库时,第二控制器接收提货指令,提货指令包含待出库货物的条形码。第二控制器生成携带待出库货物的条形码的出库信号并发送相应的货仓的轨道货架的第一控制器。第一控制器接收出库信号后,第一控制器控制待出库货物的储物架的第一驱动装置和第二驱动装置,将储物架停泊于接货点(即出货位置)。在储物架停泊于接货点后,第二控制器控制存取机构移动至储物架、自动扫描核对待出库货物的条形码或电子标签,然后在核对正确后,存取机构取出货物放置于电动堆栈仓,并且向电子标签写入提取信息,电动堆栈仓的电动移动承台在第二控制器的控制下移动至电动传送带的输入端,通过电动传送带将待出库货物输送到直线交叉带分拣机,由直线交叉带分拣机送往指定的分拣出口,完成出库。
本发明的移位式自动仓储物流系统的电动堆栈仓的功能,提高了进货或出货的高效率。电动堆栈仓在大流量时能削峰,在小流量时能填谷,以均衡直线交叉带分拣机与存取机构之间的流量和作业节奏,其序时逻辑完全满足仓储系统的管理要求。
本发明的轨道货架的多个储物架在矩形地轨结构上呈离散型设置,采用间隙式双向推搡移动,大大缩短接货点与存取机构在系统匹配与实际对接之间的等待时间。
以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
- 轨道货架、移位式自动仓储物流系统及其输送方法
- 轨道货架及移位式自动仓储物流系统