一种小型柔性驱动蛇形机械臂
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及机器人技术领域,尤其是一种小型柔性驱动蛇形机械臂。
背景技术
机器人技术早已被广泛的应用在诸多工业自动化生产领域中,但传统的工业机器人大多只适用于结构化环境,如工作台、障碍物、操作物等空间位置、布局均已知,并且给定的工作空间范围较大,而面对非结构化、狭窄、复杂的工作环境,此类型机器人很难完成相应的作业任务甚至不再适用。在机电技术中融合仿蛇技术,研发的蛇形机械臂不仅解决了很多在航空探索、国防、医疗、农业、工业中的非结构化特殊环境作业需求,还可以提高机器人的灵活性、鲁棒性、可达工作空间等。
现有的蛇形机械臂技术大多选择增加自由度数目以改善机器人的运动灵活性、柔性、工作空间范围等,增加自由度数目能达到以上目的,而且对于绳驱动机械臂,由伺服驱动器配合直线运动器件实现,一根绳索需要配合一个伺服驱动器,两根绳索控制一个自由度,即两个伺服驱动器控制一个关节运动,所以增加自由度同时会增加机器人的运动负载,使本体机构变得更加笨重,驱动成本也会相应提高。因此,有必要设计一种小型的、灵活的、柔性运动的机械臂,以解决上述问题。
发明内容
本发明旨在解决现有蛇形机械臂结构尺寸大,并且在自由度数目较少时,运动灵活性较差、运动形态僵硬、工作空间范围小等问题,提供运动形态较柔性、自由度少但灵活性高的一种小型柔性驱动蛇形机械臂。
本发明所用的技术方案是:一种小型柔性驱动蛇形机械臂,包括具有六个关节的机械臂本体和驱动系统。所述机械臂本体包括各具有一个旋转关节、两个偏航关节的后臂本体与前臂本体,旋转关节位于偏航关节后端,旋转关节转轴与偏航关节转轴共面且垂直,相邻偏航关节转轴共面且平行,每部分本体结构具有三个自由度,均为机械臂整体提供了较大的运动空间范围。
进一步,所述后臂本体与前臂本体中的两个旋转关节由驱动源直接驱动,各部分根部旋转关节采用直接驱动的方式可以提高机械臂的负载能力。
进一步,所述后臂本体与前臂本体中的两组偏航关节采用间接驱动,驱动系统中控制两组偏航关节的部分包括驱动源、柔性传动机构及承载驱动源与传动机构的支撑件。
进一步,所述驱动源存放在偏航关节本体结构后端,通过支撑件与关节本体结构连接,柔性传动机构分别沿两部分本体结构的后端向前端走向布置,偏航关节利用中间柔性传动机构减小本体结构的径向尺寸,并且使本体呈现柔性运行趋势,使蛇形机械臂可以在狭窄空间内完成相应的作业任务。
进一步,所述后臂中偏航关节一结构与所述传动机构支撑件、偏航关节一结构与偏航关节二结构通过转轴、轴承连接,连接处有内凹弧形槽限制转轴的运动量,可以通过增加或减小弧形凹槽的曲率改变相应偏航关节最大运动量。
进一步,所述后臂中驱动偏航关节的柔性传动机构中包含改进带绳传动和齿轮传动;驱动源一通过齿轮传动驱动偏航关节一,齿轮系的传动比为3:3:4,驱动源二通过改进带绳传动控制偏航关节二,齿轮传动与带绳传动以同一起点沿后端向前端布置,在偏航关节二、偏航关节三结构中设计与转轴同心的周向凹槽布置带绳,槽底的半径与主动轮半径大小相等。
进一步,所述柔性传动机构内的带绳传动由同级带绳传动改进,带绳与从动轮固定为一体,即与偏航关节三结构内的凹槽固定,偏航关节三被带绳牵动绕着其与偏航关节二的连接转轴运动,以补偿主动轮转动产生的带绳运动量。
进一步,所述影响偏航关节二运动的带绳也沿着偏航关节一结构布置,需要通过补偿带绳传动产生的耦合运动量实现两关节的相对独立控制。
进一步,所述偏航关节二、偏航关节三被独立控制转动时分为以下几种情况:偏航关节二、三相对同向转动θ
进一步,所述后臂中布置改进带绳的偏航关节结构周向凹槽的顶端与底端预留通孔,用于安装圆柱销,在运动时,圆柱销相对带绳滑动,为带绳传动提供张紧作用。
进一步,所述前臂中驱动偏航关节的柔性传动机构包含改进带绳传动、齿轮传动与柔性软管;柔性软管使得驱动源三在传动机构中产生得运动量平均分配给偏航关节三、四;支撑件与偏航关节三结构、偏航关节三结构与偏航关节四结构通过转轴连接,在两关节结构周向分布四个孔,选择对称两孔布置带绳,剩余两孔布置柔性软管。
进一步,所述柔性传动机构的改进带绳传动内无从动轮,与主动轮啮合段的绳为同步带绳,未啮合部分采用钢丝绳代替,同步带绳与钢丝绳、钢丝绳与偏航关节四顶端均使用可变形铝套固定,改进带绳既能提高结构稳定性,又减少了本体结构的体积大小。
进一步,所述柔性软管既能实现偏航关节三、四的欠驱动控制,既能减小机械臂的运动负载,又能使两关节结构伴随软管柔性转动。
进一步,所述影响偏航关节运动的改进带绳传动由一个驱动源控制,而传统的绳驱动机械臂,大多数由两个驱动源控制一个关节的运动。
进一步,所述驱动系统中的驱动源转轴上安装有角位移传感器,实时反馈各关节的角位置信息。
进一步,所述蛇形机械臂可以通过外加视觉传感器,代替人工在狭窄的、高危的环境下作业。
从上述技术方案可以看出,本发明的有益效果是:本发明将机械臂划分为后臂与前臂两部分,每部分都包含一个旋转自由度、两个偏航自由度,均为机械臂整体提供了较大的运动空间范围。两个旋转关节由驱动源直接驱动,确保机械臂具备一定的负载能力,而两组偏航关节采用间接驱动,既减小了关节结构的径向尺寸,又能利用柔性传动机构使机械臂本体呈现柔性运动趋势,改善传统机械臂运动僵硬化的现状。前臂中驱动偏航关节的传动机构中加入柔性软管,实现偏航关节三、四欠驱动控制。改进带绳传动可靠性高,只需要一个驱动源即可控制。各关节的驱动源转轴上安装有角位移传感器,实时反馈各关节的角位置信息,机械臂运动实现闭环控制。
附图说明
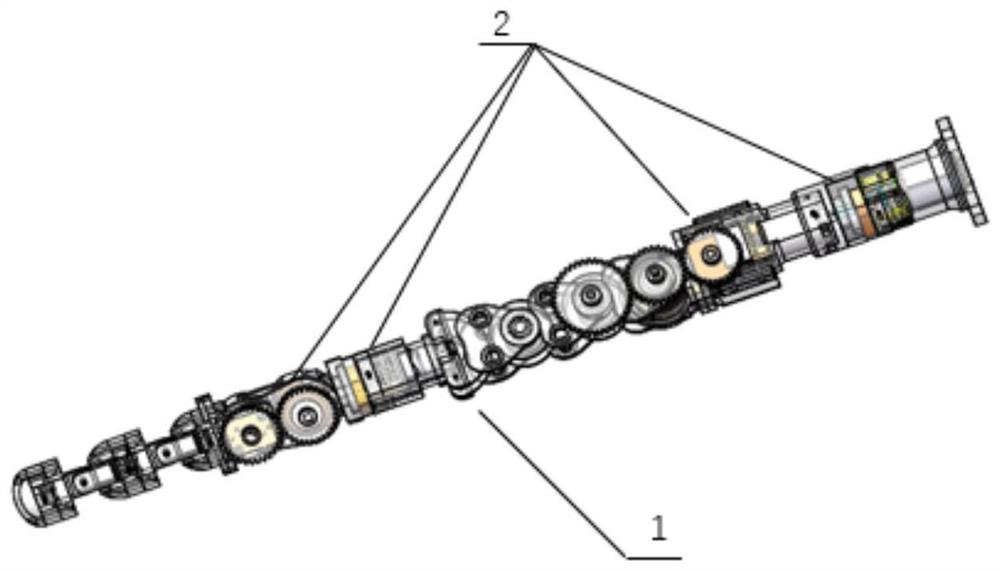
图1是本发明的结构示意图;
图2是后臂本体的结构示意图;
图3是前臂本体的结构示意图;
图中:1-机械臂本体,2-驱动系统,3-后臂本体,4-前臂本体,31-旋转关节,310-驱动源,32-驱动源一,33-驱动源二,341、342-支撑件,351-偏航关节一,352-偏航关节二,361-齿轮传动,362-改进带绳传动,37-凹槽,41-旋转关节,410-驱动源,42-驱动源三,431-偏航关节三,432-偏航关节四,451-齿轮传动,452-改进带绳传动,461-支撑件,47-通孔。
具体实施方式
为了使本发明的技术方案更加清晰,下面通过实例参考,并结合附图做进一步阐述说明。
实施例:一种小型柔性驱动蛇形机械臂,请参考图1,包括机械臂本体1与驱动系统2。具体的是:驱动系统在机械臂本体内分散布置,驱动整个机械臂运动。机械臂本体1包括各具有一个旋转关节、两个偏航关节的后臂本体3(图2)与前臂本体4(图3),均为机械臂整体提供了较大的运动空间范围。后臂本体3与前臂本体4中的旋转关节31、41由驱动源直接驱动,保证了机械臂具备一定的负载能力,两组偏航关节采用间接驱动。后臂本体3中驱动源一32、驱动源二33置于偏航关节一351结构后端,驱动源一32通过支撑件341接通齿轮传动361,驱动源二33通过支撑件342接通改进带绳传动362,在关节结构内的周向凹槽37布置带绳,改进带绳传动362的主动轮存放在支撑件342内部,绳沿着偏航关节一351与偏航关节二352结构内的凹槽37布置,绳的末端固定在偏航关节二352结构的最前端。支撑件342与偏航关节一351、偏航关节一351与偏航关节二352通过转轴、轴承连接,连接处有内凹弧形槽343限制转轴的运动量,可以通过增加或减小弧形凹槽的曲率进而降低或提高相应偏航关节最大运动量。前臂本体4中驱动源三42置于偏航关节三431结构后端,驱动源三42通过齿轮传动451接通改进带绳传动452,改进带绳传动452的主动轮存放在支撑件461内部。支撑件461与偏航关节三431、偏航关节三431与偏航关节四432通过转轴连接,支撑件461、偏航关节三431与偏航关节四432沿前臂本体4的机身方向设计4路通孔,两两对称布置绳和柔性软管,绳与软管的末端固定在偏航关节四432结构的最前端。
参见图2,后臂本体包含旋转关节31、偏航关节一351和偏航关节二352,分别由驱动源310、驱动源一32与齿轮传动361、驱动源二33与改进带绳传动362驱动。
旋转关节31位于两偏航关节的后端,在当前本体结构尺寸的条件下,使后臂本体的运动空间做到最大。
驱动源310直接驱动旋转关节31绕机身轴线转动;驱动源一32置于支撑件341内部,连通齿轮传动361驱动偏航关节一351摆动;驱动源二33置于支撑件342内部,连通改进带绳传动362驱动偏航关节二352摆动。
支撑件342与偏航关节一351、偏航关节一351与偏航关节二352通过转轴、轴承连接。
偏航关节的连接处有内凹弧形槽343限制转轴的运动量,可以通过增加或减小偏航关节一351与支撑件342结构上的弧形凹槽的曲率,进而降低或提高相应偏航关节最大运动量。
偏航关节一351与偏航关节二352结构内凹槽的顶端与底端留有通孔37,用于安装两端固定圆柱销,起到带绳传动预紧的作用。
参见图3,前臂本体包含旋转关节41、偏航关节三431和偏航关节四432,分别由驱动源410、驱动源三42与改进带绳传动452驱动。
旋转关节41位于两偏航关节的后端,在当前本体结构尺寸的条件下,使前臂本体的运动空间做到最大。
支撑件461、偏航关节三431与偏航关节四432沿前臂本体4的机身方向等间距设计4路通孔47,两两对称布置绳和柔性软管,绳与软管的末端固定在偏航关节四432结构的最前端。
驱动源410直接驱动旋转关节41绕机身轴线转动;驱动源三42与带绳传动452的主动轮依次置于支撑件461内部,带绳传动的主动轮位于驱动源三42的后端,柔性软管使驱动源三42产生的运动量平均分配,两偏航关节伴随着软管柔性摆动相同的角度。
以上提及的驱动源310、驱动源一32、驱动源二33、驱动源410、驱动源三42的输出转轴上均安装角位移传感器,用于测量驱动源转动的角度,同时将信息反馈给控制器做关节运动闭环控制。
本发明的工作原理是:本发明的驱动系统2分散在机械臂本体1结构内部,根据运动控制需求,两旋转关节驱动源的运动量直接作用于关节,而后臂中两偏航关节的独立运动控制需要将对应两驱动源的运动量进行解耦,前臂中两偏航关节利用传动机构中的柔性软管平均分配驱动源传递给带绳传动的运动量,然后结合传感器反馈实现闭环控制。
- 一种小型柔性驱动蛇形机械臂
- 一种电磁驱动柔性机械臂模块及柔性机械臂