一种康复外骨骼机器人及其步态规划方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及康复外骨骼机器人技术领域,具体是指一种康复外骨骼机器人及其步态规划方法。
背景技术
众所周知,人口老龄化比例大幅度增加,其中由于偏瘫、中风导致的下肢不便老人不断增多,由于脊柱神经受损而导致下肢无力、偏瘫、瘫痪的人群也在不断增加。自20世纪以来,以美国为首的国家开始不断进行助力外骨骼以及康复外骨骼机器人的研究,伴随着机器人技术的不断进步,各个国家在下肢康复外骨骼的研究有了不断的突破。我国也逐渐认识到机器人对科技实力提升的重要性,逐步开始大力推广和发展机器人事业,近年来不断有新的机器人出现。康复用下肢外骨骼机器人能够帮助患者进行腿部康复训练,训练在可重复性方面优于传统方法,可以大幅缩短患者的康复训练时间,并减少陪同康复医师的数量。但现有的康复外骨骼机器人欠缺驱动结构,患者通过盆骨的扭动来使重心向前运动,无法给身体提供稳定的支撑。
所以,一种康复外骨骼机器人及其步态规划方法成为人们亟待解决的技术问题。
发明内容
为解决上述技术问题,本发明提供的技术方案为一种康复外骨骼机器人及其步态规划方法:
一种康复外骨骼机器人及其步态规划方法,包括康复外骨骼机器人、手杖、传感器控制系统以及步态规划方法,所述康复外骨骼机器人包括主机箱、连接架以及设置于连接架两侧且结构相同的第一行走执行机构和第二行走执行机构,所述主机箱中设有控制器、陀螺仪以及供电模块,所述连接架一端与第一行走执行机构呈可拆卸连接,另一端与第二行走执行机构呈可拆卸连接,所述第一行走执行机构包括髋关节执行机构、大腿连杆、膝关节执行机构、小腿连杆以及脚底压力鞋,所述髋关节执行机构、膝关节执行机构上均设有伺服电机;
所述手杖包括结构相同的第一手杖和第二手杖,所述第一手杖、第二手杖均与主机箱中的控制器电性连接,所述第一手杖、第二手杖上均设有控制按键;
所述传感器控制系统包括肌电传感器、角度传感器以及压力传感器,所述肌电传感器、角度传感器以及压力传感器均与控制器电性连接,所述肌电传感器设置于手杖顶端,所述角度传感器设置于膝关节执行机构,所述压力传感器设置于脚底压力鞋上;
所述步态规划方法如下所示:
步骤1、通过角度传感器采集得到数据后,对采集到的关机角度进行判断,预设定各关节转动角度的阈值,如果当前关节角度在极限范围内,则表示机器人各关节运转正常;若超出角度的阈值,伺服电机停止运行,控制器进入异常处理程序,系统根据角度传感器所在灵位,让腿部关节复位,系统恢复初始状态;
步骤2、通过压力传感器和陀螺仪的配合进行检测康复外骨骼机器人的步态,每个步行周期最少会有两个手杖、一条腿或两条腿、一个手杖来支撑地面,保证身体的平衡稳定;若监测到的压力传感器的数量不在阈值范围内,该系统有摔倒的潜在风险,也进入异常状态,并关闭所有伺服电机,按下第一手杖、第二手杖上的控制按键,系统进行复位;陀螺仪主要对康复外骨骼机器人上身姿态进行判断,若外骨骼倾斜度超过设定的阈值,则判断当前系统进入摔倒状态,系统进入异常并立即停止伺服电机供电,并等待系统确认复位;
步骤3:当系统进入异常后,控制器首先判断当前状态是否需要切断伺服电机供电,然后将异常信息传输至控制器,控制器进入异常处理部分,并等待系统复位。
进一步地,所述大腿连杆上设有第一固定带,所述第一固定带与大腿连杆呈可拆卸连接,所述小腿连杆上设有第二固定带,所述第二固定带与小腿连杆呈可拆卸连接。
进一步地,所述伺服电机为直流伺服电机,所述髋关节执行机构、膝关节执行机构均采用直流伺服电机驱动。
进一步地,所述髋关节执行机构、膝关节执行机构为两个主动关节,同时髋关节执行机构、膝关节执行机构中的活动轴平行,每条腿的运动范围都在一个平面内。
进一步地,所述控制器的型号为STM8AF5289。
进一步地,所述供电模块的供电电压为5V。
本发明与现有技术相比的优点在于:本发明采用康复外骨骼机器人、手杖、传感器控制系统的配合结构,使得康复外骨骼机器人的稳定性得到大幅度的提升;本发明中传感器控制系统是独立于控制器的一部分,会对关节角度等数据进行预处理,也利用了单片机系统实时性特性,完成了对外骨骼系统运动状态的监测,也弥补了上位机非实时系统在安全方面存在的问题;并且控制器可以对采集到的运动状态信息进行实时处理,大幅减少总线上的数据量并增加了通信的可靠性;本发明设计合理,值得大力推广。
附图说明
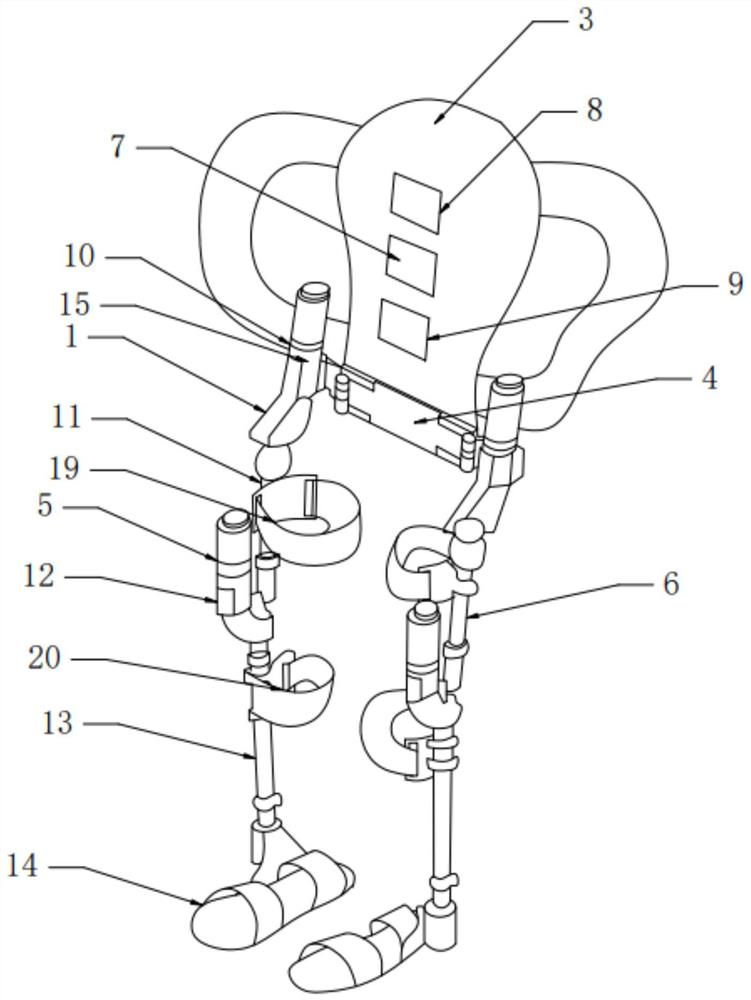
图1是本发明中康复外骨骼机器人的结构示意图;
图2是本发明中手杖的结构示意图;
图3是本发明一种康复外骨骼机器人及其步态规划方法的流程图;
如图所示:1、康复外骨骼机器人,2、手杖,3、主机箱,4、连接架,5、第一行走执行机构,6、第二行走执行机构,7、控制器,8、陀螺仪,9、供电模块,10、髋关节执行机构,11、大腿连杆,12、膝关节执行机构,13、小腿连杆,14、脚底压力鞋,15、伺服电机,16、第一手杖,17、第二手杖,18、控制按键,19、第一固定带,20、第二固定带。
具体实施方式
下面结合附图对本发明一种康复外骨骼机器人及其步态规划方法做进一步的详细说明。
结合附图,图1~3,一种康复外骨骼机器人及其步态规划方法,包括康复外骨骼机器人1、手杖2、传感器控制系统以及步态规划方法,所述康复外骨骼机器人1包括主机箱3、连接架4以及设置于连接架4两侧且结构相同的第一行走执行机构5和第二行走执行机构6,所述主机箱3中设有控制器7、陀螺仪8以及供电模块9,所述连接架4一端与第一行走执行机构5呈可拆卸连接,另一端与第二行走执行机构6呈可拆卸连接,所述第一行走执行机构5包括髋关节执行机构10、大腿连杆11、膝关节执行机构12、小腿连杆13以及脚底压力鞋14,所述髋关节执行机构10、膝关节执行机构12上均设有伺服电机15;
所述手杖2包括结构相同的第一手杖16和第二手杖17,所述第一手杖16、第二手杖17均与主机箱3中的控制器7电性连接,所述第一手杖16、第二手杖17上均设有控制按键18;
所述传感器控制系统包括肌电传感器、角度传感器以及压力传感器,所述肌电传感器、角度传感器以及压力传感器均与控制器电性连接,所述肌电传感器设置于手杖顶端,所述角度传感器设置于膝关节执行机构,所述压力传感器设置于脚底压力鞋上;
所述步态规划方法如下所示:
步骤1、通过角度传感器采集得到数据后,对采集到的关机角度进行判断,预设定各关节转动角度的阈值,如果当前关节角度在极限范围内,则表示机器人各关节运转正常;若超出角度的阈值,伺服电机停止运行,控制器进入异常处理程序,系统根据角度传感器所在灵位,让腿部关节复位,系统恢复初始状态;
步骤2、通过压力传感器和陀螺仪的配合进行检测康复外骨骼机器人的步态,每个步行周期最少会有两个手杖、一条腿或两条腿、一个手杖来支撑地面,保证身体的平衡稳定;若监测到的压力传感器的数量不在阈值范围内,该系统有摔倒的潜在风险,也进入异常状态,并关闭所有伺服电机,按下第一手杖、第二手杖上的控制按键,系统进行复位;陀螺仪主要对康复外骨骼机器人上身姿态进行判断,若外骨骼倾斜度超过设定的阈值,则判断当前系统进入摔倒状态,系统进入异常并立即停止伺服电机供电,并等待系统确认复位;
步骤3:当系统进入异常后,控制器首先判断当前状态是否需要切断伺服电机供电,然后将异常信息传输至控制器,控制器进入异常处理部分,并等待系统复位。
所述大腿连杆11上设有第一固定带19,所述第一固定带19与大腿连杆11呈可拆卸连接,所述小腿连杆13上设有第二固定带20,所述第二固定带20与小腿连杆13呈可拆卸连接。
所述伺服电机15为直流伺服电机,所述髋关节执行机构10、膝关节执行机构12均采用直流伺服电机驱动。
所述髋关节执行机构10、膝关节执行机构12为两个主动关节,同时髋关节执行机构10、膝关节执行机构12中的活动轴平行,每条腿的运动范围都在一个平面内。
所述控制器7的型号为STM8AF5289。
所述供电模块的供电电压为5V。
本发明的具体实施方式如下所示:通过角度传感器采集得到数据后,对采集到的关机角度进行判断,预设定各关节转动角度的阈值,如果当前关节角度在极限范围内,则表示机器人各关节运转正常;若超出角度的阈值,伺服电机停止运行,控制器进入异常处理程序,系统根据角度传感器所在灵位,让腿部关节复位,系统恢复初始状态;
步骤2、通过压力传感器和陀螺仪的配合进行检测康复外骨骼机器人的步态,每个步行周期最少会有两个手杖、一条腿或两条腿、一个手杖来支撑地面,保证身体的平衡稳定;若监测到的压力传感器的数量不在阈值范围内,该系统有摔倒的潜在风险,也进入异常状态,并关闭所有伺服电机,按下第一手杖、第二手杖上的控制按键,系统进行复位;陀螺仪主要对康复外骨骼机器人上身姿态进行判断,若外骨骼倾斜度超过设定的阈值,则判断当前系统进入摔倒状态,系统进入异常并立即停止伺服电机供电,并等待系统确认复位;
步骤3:当系统进入异常后,控制器首先判断当前状态是否需要切断伺服电机供电,然后将异常信息传输至控制器,控制器进入异常处理部分,并等待系统复位。
本发明采用康复外骨骼机器人1、手杖2、传感器控制系统的配合结构,使得康复外骨骼机器人1的稳定性得到大幅度的提升;本发明中传感器控制系统是独立于控制器的一部分,会对关节角度等数据进行预处理,也利用了单片机系统实时性特性,完成了对外骨骼系统运动状态的监测,也弥补了上位机非实时系统在安全方面存在的问题;并且控制器可以对采集到的运动状态信息进行实时处理,大幅减少总线上的数据量并增加了通信的可靠性;本发明设计合理,值得大力推广。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种基于稳定性准则的下肢康复外骨骼机器人步态规划方法
- 一种基于稳定性准则的下肢康复外骨骼机器人步态规划方法