一种有收放式脚轮的容器和AGV车以及搬运容器方法
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及纺织机械领域,尤其是储存纤维条的容器和AGV车以及搬运容器的方法。
背景技术
纺纱厂里,公知的是,纤维条被储存在容器里,在梳棉机、并条机、条并卷联合机、精梳机、粗纱机、转杯纺和涡流纺之间运输。通常来说,这个储存纤维条的容器,被称之为条筒(条桶)。目前,纺纱厂用的最常见的是带脚轮的圆形条筒。圆形条筒的优点是,由于带有脚轮,操作工非常方便的将条筒推动或者拉动地方式进行搬运;另一有利之处是:AGV车也可以将条筒自动的推着或者拖动地方式实现自动化的运输。但是,由于圆形条筒本身的形状限制,尤其用在涡流纺(喷气纺、空气纺)或者转杯纺的纺纱单元下的时候,圆形条筒和圆形条筒之间成一排或者二排的排列,条筒与条筒之间,也就是圆形条筒的圆形的外壁之间的弧形空间,没有放置纤维条,从而浪费空间。因而为了充分利用空间,一种矩形的条筒被提及,并且这种趋势开始在纺纱厂出现,尤其是用在尤其用在涡流纺(喷气纺、空气纺)或者转杯纺的纺纱单元的纤维条的供给。如专利“CN1091719A”提出一种矩形条筒。进一步的是,不仅矩形条筒充分利用空间,矩形条筒相对于圆形条筒的优势在于:同等面积的情况下,矩形条筒比圆形条筒的纤维条装载量多达30%以上。
但是,相对于圆形条筒有脚轮,目前的矩形条筒都没有安装脚轮,原因是因为:矩形条筒在并条机、梳棉机或者精梳机装载纤维条的时候,纤维条同时有两种运动组合:一个是一圈圈的圈放在条筒中,一个是延这轴线方向往复运动的成圈放在条筒中。为了达到这种结果,有一个位于条筒上方的固定但是旋转的圈条盘和一个往复机构来回移动矩形条筒。由于这种往复机构移动矩形条筒,从而要求矩形条筒底部相对于接触面相对“静止”,因而矩形条筒通常都是不带脚轮,以防止矩形条筒在往复运动中滑动,导致纤维条在条筒中倾斜和紊乱。不带有脚轮能保证矩形条筒在纤维条往复圈放中,不至于移动,相对于条筒与接触面静止。但是不带脚轮的矩形条筒给搬运矩形条筒带来了不利的影响。
由于不带有脚轮,操作工在搬运矩形条筒的时候,不得不借助一个条筒搬运车,将条筒在各个设备之间搬运。
更进一步,就是采用AGV车搬运条筒。比如专利:“DE102017101810B3”,采用一种AGV车搬运矩形调停。这个发明中,AGV车将不带脚轮的矩形条筒搬离地面进行搬运。它的不足之处是:即使是采用了AGV车搬运矩形条筒,由于不同于圆形条筒带有脚轮(对于圆形条筒,AGV车可以借助脚轮推着或者拖拉圆形条筒),AGV车在搬运矩形条筒的时候,不得不抱住矩形条筒,并将其搬离地面。这样一来,AGV车不得不非常笨重,而且往往非常笨拙,需要更多的电力消耗(能耗),极大的缩短了AGV车的单次充电的使用时间长度。
发明内容
为了克服矩形条筒的这个缺陷,本发明提出了一种新的矩形条筒和一种AGV车以及AGV车搬运矩形条筒的方法。本发明提出的方案是:一种带有收放式脚轮的矩形条筒,所述的收放式的脚轮在条筒装载纤维条的时候,被收缩在条筒的底部,不起移动作用,从而确保条筒在往复运动中不发生不必要的移动;当条筒在搬运的过程中,所述的脚轮伸出条筒底部,有助于操作工或者AGV车将条筒在地面自由移动;进一步,由于带有脚轮,AGV车不需要将条筒搬离开地面,而是直接借助脚轮,将条筒在地面自由移动,在各个工序设备之间运输。同时,基于这种收放式脚轮的矩形条筒,本发明也提出一种带有电磁铁和有凹型或者凹弧形夹持面的AGV车和AGV车搬运条筒的方式。
本发明的有益之处是:不仅保证了条筒在纤维条往复圈放过程中,由于脚轮收缩起来,不起到滑动作用,从而确保条筒的固定,也有利于,在搬运条筒过程中,脚轮被放下来,起到支持滑动条筒的作用,方便操作工和AGV车搬运矩形条筒。
本发明所采用的解决这个问题的具体技术方案是:一种带有收放式脚轮的矩形条筒,有底座、收放式脚轮、连杆装置,所述的脚轮安装在条筒的底座,有一个连杆装置和脚轮连接,控制脚轮收缩或者脚轮放下;当条筒位于圈条盘下进行装载纤维条的时候,所述的脚轮被收缩于条筒的底座内,条筒通过底座与条筒盘接触,脚轮不起到滑动作用,从而保证条筒没有滑动的不利影响。当条筒处在被搬运的状态的时候,所述脚轮从底座内被放下,伸出条筒的底座与地面接触,脚轮开始发生作用,起到滑动作用,在AGV车或者操作工的外力作用下在地面自由移动。
另外,作为一个有益的补充的具体技术解决方案是:一种带有固定脚轮的矩形条筒,有底座、脚轮限定块、连杆装置,所述的脚轮安装在条筒的底座,所述的脚轮限定块锁定和释放脚轮的转动。所述连杆装置与脚轮限定块连接;当不需要脚轮的移动作用的时候,,连杆装置通过脚轮限定块将脚轮锁定,不能转动;当需要脚轮移动的时候,连杆装置通过脚轮限定块释放脚轮,脚轮可以自由转动和移动。实际搬运条筒中,当条筒在装载纤维条的时候,或者条筒被置于喂纤维条状态时候,脚轮被锁定,从而保证条筒固定不动在当前位置;当条筒在被操作工或者AGV车搬运的时候,脚轮被释放,以便自由地移动条筒。
本发明实现一种AGV车搬运所述收放式脚轮的矩形条筒的具体技术方案是:一种AGV车,用于搬运条筒,所述的AGV车有电磁块,一个控制杆。所述电磁块当AGV车靠近条筒时候,通电,电磁铁有磁力,与条筒上的磁力相吸(极性相反。)所述的AGV车和条筒上可以有多个磁性块进行定位,并且牢牢将条筒抱住,同时借助控制杆将条筒的脚轮从条筒底座放下,起到滑动作用。这样一来,AGV车一方面将条筒夹持住,一方面由于脚轮开始作用,AGV车可以自由的将条筒运输和移动。当AGV车将条筒搬运到指定位置或者目的地时,AGV车借助控制杆将条筒脚轮收缩至条筒底座内,这样一来,脚轮由于收缩至底座内,条筒没有脚轮的滑动作用,条筒定位该位置;进一步,AGV车上的电磁铁块断电,电磁铁失去磁力作用,与条筒上的磁铁没有磁力作用,从而AGV车放下和离开条筒,进行下一步工作。
本发明实现一种AGV车搬运所述固定脚轮的矩形条筒的具体技术方案是:一种AGV车,用于搬运条筒,所述的AGV车有电磁块,一个控制杆。所述电磁块当AGV车靠近条筒时候,通电,电磁铁有磁力,与条筒上的磁力相吸(极性相反。)所述的AGV车和条筒上可以有多个磁性块进行定位,并且牢牢将条筒抱住,同时借助控制杆将条筒的脚轮限定块从脚轮释放,脚轮可以自由起到滑动作用。这样一来,AGV车一方面将条筒夹持住,一方面由于脚轮开始起移动作用,AGV车可以自由的将条筒运输和移动。当AGV车将条筒搬运到指定位置或者目的地时,AGV车借助控制杆将条筒脚轮限定块锁定脚轮,这样一来,由于脚轮限定块的锁定作用,条筒没有脚轮的滑动作用,条筒定位该位置;进一步,AGV车上的电磁铁块断电,电磁铁失去磁力作用,与条筒上的磁铁没有磁力作用,从而AGV车放下和离开条筒,进行下一步工作。
作为本发明的一个优选实施方式,对于搬运矩形条筒的AGV车,所述AGV车从俯视图看,AGV车夹持矩形条筒的夹持面成一个凹字型结构,本发明称之为“凹型”。其中凹的部分宽度与所搬运的矩形条筒的宽度相对应,通常大于矩形条筒的宽度。根据不同宽度的矩形条筒,这个凹字型的宽度也随之匹配,大于或者等于矩形条筒的宽度(指矩形条筒的短侧边的长度)。为了牢固地夹持条筒,AGV车夹持面与矩形条筒侧面之间的间隙范围是:0-100mm,优选地是1-10mm;AGV车夹持面凹陷距离的范围是:0-1500mm,优选地是20-500mm。由于这个凹字型的结构,两边的突起,可以起到两个夹持臂的作用,将矩形条筒夹持住,在AGV车的电磁铁和条筒的带有磁力的金属块磁力作用下,紧紧地将条筒夹持住,在运输过程不发生侧翻和倾倒。
作为本发明的一个优选实施方式,对于搬运圆形条筒的AGV车,所述AGV车从俯视图看,AGV车夹持圆形条筒夹持面成一个凹进去的弧形结构,本发明称之为“凹弧形”。所述的AGV车的弧形夹持面与条筒的弧形结构配合。它们之间的距离范围是0-60mm,优选地是1-10mm。所述AGV车的弧形夹持面凹陷距离范围是01-1500mm,优选地是 20-500mm。这个凹进去的弧形结构的两边突起弧形相当于夹持臂,同时在AGV车的电磁铁和条筒所携带的磁力块作用下,条筒被AGV车紧紧夹持,在运输过程中不发生倾倒。
作为本发明的一个优选实施方式,所述AGV车上有一个控制杆。所述控制杆通过移动条筒上的控制杆,对于收放式脚轮的条筒,将条筒上的脚轮收缩或者放下。具体的作用过程是:条筒有4个收放式脚轮、条筒控制杆、连杆装置,所述条筒控制杆与连杆装置相连接,所述连杆装置与4个脚轮连接。AGV车的控制杆移动条筒的控制杆,从而借助于条筒控制杆连接的连杆装置,将于连杆装置相连接的脚轮收缩至条筒底座内,失去脚轮移动作用,或者将脚轮漏出底座,脚轮起到移动作用。
作为本发明的一个优选实施方式,所述AGV车上有一个控制杆。所述控制杆通过移动条筒上的控制杆,对于有条筒限定块的脚轮,通过条筒限定块将条筒上的脚轮锁定或者释放。具体的作用过程是:条筒有4个带限定块的脚轮、条筒控制杆、连杆装置,所述条筒控制杆与连杆装置相连接,所述连杆装置与4个脚轮连接。AGV车的控制杆移动条筒的控制杆,从而借助于条筒控制杆连接的连杆装置,将于连杆装置相连接的脚轮锁定,失去脚轮移动作用,或者将脚轮释放,脚轮起到移动作用。
作为本发明的一个优选实施方式,所述条筒上有永久磁铁块或者能被磁力吸引的金属块。所述磁铁块或者金属块安装在矩形条筒的短侧面。所述的磁铁块或者金属块安装在矩形条筒的单个短侧面或者两个短侧面,磁铁块或者金属块的数量和大小,根据实际条筒和纤维条重量可以优化选择。
作为本发明的一个优选实施方式,所述AGV车上有电磁铁,当通电时候,电磁块有磁力;当断电的时候,电磁块磁力不起作用。所述电磁铁安装在AGV车搬运条筒的接触面,即是本发明所述的AGV车凹面。所述电磁铁的数量和大小,根据实际条筒的磁铁块或者金属块来优化选择。
作为本发明的一个优选实施方式,所述AGV车是一种工业自动导航的搬运车,带有至少一个脚轮,优选是4个脚轮。所述AGV车有自主导航功能,在各个纺纱设备之间自动移动,搬运各个纺纱设备之间的条筒。所述的纺纱设备包括但不限于:梳棉机、并条机、条并卷联合机、精梳机、粗纱机、转杯纺纱机、涡流纺纱机、喷气涡流纺纱机、空气纺纱机、条筒库、条筒站、条筒维修站、条筒储存库等。
作为本发明的一个优选实施方式,所述AGV车搬运条筒的过程是:
1)AGV车自主式移到条筒,AGV车电磁铁通电,产生磁力,与条筒上的磁铁块或者金属块产生磁力吸引力,将条筒夹持住,与此同时,AGV车的控制杆,通过控制条筒上的控制杆,将条筒上的脚轮从底座漏出(放下),或者释放脚轮限定块,从而借助条筒脚轮的移动作用,将条筒自由地移动和搬运。
2)AGV车将条筒搬运至指定的目标位置后,AGV车的控制杆,通过控制条筒上的控制杆,将条筒 上的脚轮收进底座内,或者锁定脚轮限定块,从而让脚轮失去移动作用,将条筒放置在目标位置,一次同时,AGV车电磁铁断电,电磁铁磁力消失,与条筒上的磁铁块或者金属块不产生磁力吸引作用。AGV车可以自由的离开条筒,进行下一步工作。
作为本发明的一个优选实施方式,所述矩形条筒有条筒体,底座、脚轮和与脚轮相连的连杆件。所述的连杆件与脚轮相连。并且所述的连杆件在矩形条筒的侧壁,优选地是短边侧壁上,有一个控制控制杆与之相连。当所述控制杆向下移动的时候,连杆件将脚轮收缩并且锁定与于底座内,在这个状态下,脚轮不起作用,条筒通过底座直接与地面或者条筒盘接触;当所述控制杆向上移动的时候,连杆件将脚轮放下,并且漏出底座,同时锁定位置,条筒通过脚轮与地面或者条筒盘接触,脚轮起到滑动作用。
这里有两种应用场景。
1) 一种应用场景是由操作工进行条筒的搬运工作。
当条筒里面被装载满纤维条后,机器(并条机、梳棉机、精梳机)进行自动换筒,将该满条筒推出条筒出口处,操作工通过控制控制杆,将脚轮从底座内漏出,在这个状态下,由于脚轮漏出底座,脚轮可以辅助操作工自由地移动条筒,从一个工位搬运到下一个工位。当条筒被操作工搬运至指定位置(例如:转杯纺或者涡流纺的纺纱单元,或者并条机、粗纱机、条并卷联合机的导条架,或者条筒库、条筒站)时,操作工筒过控制控制杆,将脚轮收缩和固定于底座内,在这个状态下,脚轮由于收缩于底座内,条筒通过底座下底面与地面接触,从而借助底座和地面的摩擦力定位于该位置,不能自由地移动。
当条筒的纤维条被耗尽后,操作工来到所述条筒,通过控制控制杆,将脚轮漏出底座,从而脚轮开始起到移动作用,辅助操作工将条筒运输到指定位置。当条筒被操作工搬运到梳棉机、并条机或者精梳机的自动换筒处的入口处时,操作工通过控制控制杆将脚轮收缩且固定于底座内,此时,由于没有脚轮,条筒不能自由地移动。
2)一种应用场景是由AGV车进行自动地条筒搬运工作。
当条筒里面被装载满纤维条后,机器(并条机、梳棉机、精梳机)进行自动换筒,将该满条筒推出条筒出口处,AGV车的控制杆通过控制条筒控制杆,将脚轮从底座内漏出,在这个状态下,由于脚轮漏出底座,脚轮可以辅助AGV车自由地移动条筒,从一个工位搬运到下一个工位。当条筒被AGV车搬运至指定位置(例如:转杯纺或者涡流纺的纺纱单元,或者并条机、粗纱机、条并卷联合机的导条架,或者条筒库、条筒站)时,AGV车的控制杆通过控制条筒的控制杆,将脚轮收缩和固定于底座内,在这个状态下,脚轮由于收缩于底座内,条筒通过底座下底面与地面接触,从而借助底座和地面的摩擦力定位于该位置,不能自由地移动。
当条筒的纤维条被耗尽后,AGV车来到所述条筒,AGV车的控制杆通过控制条筒控制杆,将脚轮漏出底座,从而脚轮开始起到移动作用,辅助AGV车将条筒运输到指定位置。当条筒被AGV车搬运到梳棉机、并条机或者精梳机的自动换筒处的入口处时,AGV车的控制杆通过控制条筒控制杆将脚轮收缩且固定于底座内,此时,由于没有脚轮,条筒不能自由地移动。
作为本发明的一个优选实施方式,所述矩形条筒有条筒体,底座、脚轮和脚轮限定块,以及和脚轮限定块相连的连杆件。所述的脚轮限定块起到制动脚轮的作用。所述的连杆件在矩形条筒的侧壁,优选地是短边侧壁上,有一个控制控制杆与之相连。当所述控制杆向下移动的时候,控制杆带到连杆件运动,通过限定块,将脚轮锁定,在这个脚轮锁定状态下,脚轮不起作用;当所述控制杆向上移动的时候,控制杆带到连杆件运动,通过限定块,释放脚轮锁定,在这个脚轮释放的状态,脚轮起到滑动作用。在本发明优选实施方式中,脚轮没有收缩和放下来,而是通过一个脚轮限定块将脚轮锁定或者释放,从而起到脚轮不起作用和起作用的两种状态,从而达到本发明提出的解决方案。
作为本发明的一个优选实施方式,所述脚轮是一种万向轮,在各个方向自由滑动。
作为本发明的一个优选实施方式,所述矩形条筒底座至少有1个脚轮,优选是4个脚轮。
作为本发明的一个优选实施方式,所述的带有脚轮条筒是矩形条筒也可以是圆形条筒,优选是矩形条筒。对于圆形条筒,通常带有脚轮,由于圆形条筒在装载纤维条的时候,不做往复式的运动,因此,优选地,圆形条筒不需要将脚轮收缩,或者锁定,或者释放。从而,AGV车在搬运圆形条筒的情况下,不需要控制脚轮的状态变化。但是本发明所述的AGV车通过电磁铁和磁力块搬运圆形条筒的原理和发明属于本发明保护范围。
作为本发明的一个优选实施方式,所述条筒是一种圆形条筒,直径范围是300-1500mm,高度是900-1500mm。优选的直径是300/350/400/450/470/500/600/1000mm。所述高度是条筒置于地面,从地面至条筒顶端的高度。
作为本发明的一个优选实施方式,所述条筒是一种矩形条筒,矩形条桶的长宽高分别是:(600-1500)mm ,(180-600)mm ,(900-1500)mm。所述高度是条筒置于地面,从地面至条筒顶端的高度。
作为本发明的一个优选实施方式,本发明所述带电磁铁的AGV车将带脚轮的条筒在一个典型的转杯纺流程中使用,实现自动化的条筒运输。所述的典型的转杯纺纱流程是:梳棉机-》第一道并条机-》第二道并条机-》转杯纺纱机。
作为本发明的一个优选实施方式,本发明所述带电磁铁的AGV车将带脚轮的条筒在一个典型的涡流纺流程中使用,实现自动化的条筒运输。所述的典型的转杯纺纱流程是:梳棉机-》第一道并条机-》第二道并条机-》第三道并条机-》涡流纺纱机(喷气纺纱机、空气纺纱机)。
作为本发明的一个优选实施方式,本发明所述带电磁铁的AGV车将带脚轮的条筒在一个典型的普通环锭纺流程中使用,实现自动化的条筒运输。所述的典型的转杯纺纱流程是:梳棉机-》第一道并条机-》第二道并条机-》粗纱机-》细纱机。
作为本发明的一个优选实施方式,本发明所述带电磁铁的AGV车将带脚轮的条筒在一个典型的精梳环锭流程中使用,实现自动化的条筒运输。所述的典型的转杯纺纱流程是:梳棉机-》第一道并条机-》条并卷联合机-》精梳机第二道并条机-》粗纱机-》细纱机。
作为本发明的一个优选实施方式,本发明所述带电磁铁的AGV车将带脚轮的条筒在上述四种典型的纺纱流程(普通环锭纺、精梳环锭纺、转杯纺、涡流纺)的组合或者变形中使用,实现自动化的条筒运输。
作为本发明的一个优选实施方式,本发明所述带电磁铁的AGV车也可以用于不带脚轮的条筒运输。
作为本发明的一个优选实施方式,本发明所述带电磁铁的AGV车也可以同时搬运多于一个条筒,这样能够减少搬运次数,实现更高效地搬运条筒。优选地是2个至4个,尤其是用于搬运矩形条筒。
本发明的有益之处是:由于条筒带有收放式的脚轮,或者脚轮限定块的脚轮,在条筒,尤其是矩形条筒在装载纤维条的过程中,脚轮被收缩在底座内,或者脚轮被限定块锁定,条筒在往复运动中不会移动,从而保证了纤维条优良地圈放在条筒中;进一步地是,在搬运条筒过程中,由于脚轮从底座被放下或者限定块释放了脚轮,脚轮可以自由在地面移动,辅助操作工或者AGV车轻松地搬运条筒。另外,本发明提出了AGV车带有电磁铁,在搬运条筒的过程中,所述电磁铁通电,产生磁力与条筒上的磁铁块或者带有磁力的金属吸引,将条筒紧紧地夹持在AGV车的凹型的夹持臂内,同时借助条筒的脚轮移动作用,稳定地和自由地将条筒在各个纺纱设备之间运输,条筒不会发生倾倒或者侧翻。因此本发明实现了一种可靠的稳定的AGV车搬运条筒的方法,尤其是矩形条筒。
附图说明
下面结合附图和实施例对本发明进一步说明。
图1是本发明的一个带有收放式脚轮的矩形条筒侧视示意图
图2是本发明的一个带有脚轮限定块的矩形条筒侧视示意图
图3是本发明的一个带有电磁铁和控制杆的AGV车和矩形条筒的侧视示意图
图4是本发明的一个带有电磁铁和控制杆的AGV车和矩形条筒的俯视示意图
图5是本发明的一个带有电磁铁的AGV车夹持矩形条筒的凹型侧视图
图6是本发明的一个带有电磁铁的AGV车夹持矩形条筒的凹型俯视图
图7是本发明的一个带有电磁铁的AGV车夹持圆形条筒的凹弧形侧视图
图8是本发明的一个带有电磁铁的AGV车夹持圆形条筒的凹弧形俯视图
图9是本发明的AGV车夹持2个矩形条筒的俯视示意图
图10是本发明的AGV车夹持2个圆形条筒的俯视示意图
其中,
1.连杆装置;
2.脚轮;
3.脚轮限定块;
4. AGV车脚轮;
a. 条筒与AGV车之间的间隙距离;
b.AGV车的凹陷距离;
C1.有收放式脚轮的矩形条筒;
C2.有脚轮限定块的矩形条筒;
C3.有脚轮的圆形条筒;
A1.运输矩形条筒的AGV车;
A2.运输圆形条筒的AGV车;
L1.条筒控制杆;
L2.AGV车的控制杆;
S1.条筒控制杆移动位置;
S2.条筒控制杆移动位置;
S3.AGV车控制杆移动位置;
F1.脚轮移动方向;
F2.脚轮移动方向;
F3.脚轮限定块移动方向;
F4.脚轮限定块移动方向;
F5.条筒控制杆移动方向;
F6.条筒控制杆移动方向;
F7.AGV车控制杆移动方向;
N.条筒底座;
W1.脚轮移动收缩位置;
W2.脚轮移动收缩位置;
P1.条筒限定块锁定位置;
P2.条筒限定块锁定位置;
M1.条筒磁铁块;
M2.条筒磁铁块;
MM1.AGV车的电磁铁;
MM2.AGV车的电磁铁;
Y1.AGV车俯视的凹型夹持面;
Y2.AGV车俯视的凹弧形夹持面。
具体实施方式
实施例1:
如图1是本发明的一个带有收放式脚轮的矩形条筒实施例的侧视示意图。
所述矩形条筒C1,包括4个脚轮2,所述脚轮2是方向轮,可以在各个方向自由移动,侧视图中显示出其中2个脚轮。所述的脚轮2安装在矩形条筒C1的底座N下,一个连杆装置1与4个脚轮相连接。在矩形条筒C1的短侧面有一个条筒控制杆L1,与连杆装置1相连接。作为一个经济方案,如本实施例图1所示,仅在矩形条筒C1的一个短侧面有一个控制杆L1。作为一个更灵活的方案,也可以在矩形条筒C1的两个短侧面分别安装一个条筒控制杆L1,在本实施例的图1中没有标注。
条筒控制杆L1,与连杆装置1相连接,进而借助连杆装置1与4个脚轮2相连接。这套机构控制脚轮收放的方法是: 当条筒控制杆L1沿着F5方向向下移动到S1的位置,带动连杆装置1发生作用。进一步,连杆装置1,将与之相连接的4个脚轮2分别沿着F1和F2的方向移动到W1和W2的收缩位置(另外2个脚轮2也有同样的移动),并且固定在这个位置。脚轮2处在收缩位置W1和W2,在这个位置上,脚轮2收缩到了条筒C1的底座N内,失去了脚轮2的移动作用,从而实现条筒C1的底座N直接接触接触面(地面或者条筒地盘上面)。这样的有利之处是,由于脚轮2收缩于底座N内,当条筒C1在装载纤维条的时候,脚轮2不起移动作用,从而矩形条筒C1在并条机、梳棉机或者精梳机的纤维条装载中,能保持相对于接触面的“静止”,实现纤维条在条筒C1实现往复地成圈的放置。
同样的原理,当条筒控制杆L1沿着F5的反方向移动,从S1位置回到初始的放下位置,借助连杆装置1的作用,将与之相连接的4个脚轮2从脚轮收缩位置W1和W2,沿着F1和F2的反方向,回到放下位置,并且固定。在这个位置状态下,脚轮S从底座N被放下,漏出底座N,因此脚轮2取代了底座与接触面接触,而是通过脚轮2与接触面进行接触。脚轮2是一种万向轮,因此在4个脚轮2的移动和支撑作用下,矩形条筒C1可以自己的在接触面移动。这样有利之处是:当操作工或者AGV车在移动矩形条筒C1的时候,通过将条筒控制杆L1将脚轮2从底座N内放下并且固定在这个位置,脚轮2与接触面接触,支持和移动条筒C1,进一步,由于脚轮2是一种万向轮,所以操作工或者AGV车(自动导航车)能够自由地将条筒C1搬运到指定的位置。
本实施例的有益之处是:这种带有收放式脚轮的矩形条筒,取代了以前的没有脚轮的矩形条筒,通过一个控制杆将脚轮收缩进底座内或者放下底座,从而起到“不带脚轮”和“带脚轮”的矩形条筒。当条筒在装载纤维条的时候,将脚轮收缩进底座内,成为一种“不带脚轮的条筒”;当条筒在被搬运和移动的时候,将脚轮放下底座,成为一种“带有脚轮的条筒”,从而利用了带脚轮和不带脚轮的各自优势。
实施例2:
如图2是本发明的一个带有脚轮限定块的矩形条筒侧视示意图。
在实施例1中,采用的方法是将脚轮2收缩进底座N,条筒C1变成了“不带脚轮”的条筒,将脚轮2从底座N放下来,条筒C1变成了“带脚轮”条筒。
不同于实施例1,实施2采用另一种方法,但是达到了同样的技术效果。实施例2中,矩形条筒C2有一个底座N,底座上有4个脚轮2(另外2个脚轮在侧视图中没有标示,但是对称的装在底座N上)。每个脚轮2上有一个脚轮限定块3。脚轮限定块3的作用是将脚轮2锁定或者释放。当脚轮限定块3将脚轮2锁定的时候,脚轮被锁定,无法移动。这种状态,条筒C2变成了一个“不带脚轮的条筒”;当脚轮限定块3将脚轮2释放的时候,脚轮被释放,可以自由移动。这种状态,条筒C2变成了一个“带脚轮的条筒”。从而同样的到达了实施例1中的脚轮被收缩进底座和从底座放下的技术效果。
进一步,一个条筒控制杆L1,安装在矩形条筒C2的短侧面,连接一个连杆装置1;连杆装置1和底座N上的4个脚轮2的限定块3相连接。条筒控制杆L1控制脚轮的锁定和释放的工作原理是:如图2中所示,条筒控制杆L1沿着F6方向移动到S2的新位置,带动连杆装置1作用,将与连杆装置1相连接的脚轮限定块3,分别沿着F3和F4方向移动。脚轮限定块3分别移动到条筒限定块锁定位置P1和P2的位置,从而将脚轮2锁定,使之失去移动作用,从而达到“不带脚轮”的条筒的技术效果。同样地,当条筒控制杆L1从S2的位置,回到如图中原来的位置,条筒控制杆L1的移动,通过连杆装置1将条筒限定块3从锁定位置P1和P2,回到条筒限定块3的释放状态,脚轮2可以自由的移动,从而达到了“带脚轮”的技术效果。
作为一个更灵活的方案,也可以在条筒C2的两个短侧面安装两个条筒控制杆L1(本实施例2的图2中金展示一个控制杆L1的图示)。两个控制杆L1具有同样的技术效果。
实施例3:
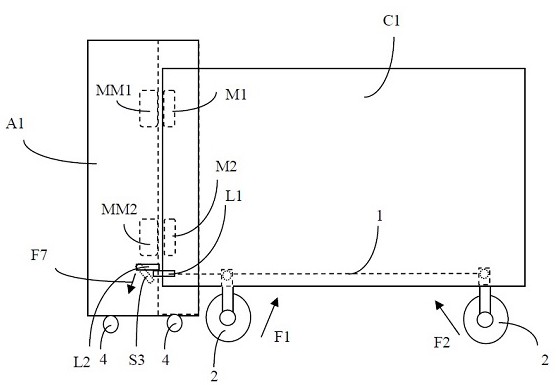
如图3是本发明的一个带有电磁铁和控制杆的AGV车搬运矩形条筒的实施例侧视示意图。
如图4是本发明的一个带有电磁铁和控制杆的AGV车搬运矩形条筒的实施例俯视示意图。
本实施例3是一个带有电磁铁(MM1、MM2)和控制杆L2的AGV车,有4个脚轮4,将实施例1中的矩形条筒C1搬运的示意图。
在纺纱生产中,尤其是转杯纺纱和涡流纺纱中,矩形条筒已经成为一个趋势;进一步,为了实现条筒搬运的自动化,AGV车被引人到了纺纱流程中的条筒搬运。本发明中,采用了实施例1中的一个有收放式脚轮的矩形条筒C1,相对于实施例1中的矩形条筒C1,本实施例3中的矩形条筒C1带有磁铁块或者带有磁力的金属块(M1、M2)。如图3和图4所示,矩形条筒C1的磁铁块(M1、M2)装载条筒的短侧面,也就是被AGV车夹持面。一般来说,AGV车通常夹持矩形条筒C1的短侧面,因而磁铁块(M1、M2)安装在短侧面。磁铁块(M1、M2)的数量和大小与AGV车的电磁铁(MM1、MM2)匹配。本实施例3中,AGV车的电磁铁(2个MM1、2个MM2)有4个,见如图3和4所示;条筒C1的磁铁块也相应地有4个(2个M1,2个M2)。
在本实施例3中,AGV车的电磁铁(MM1、MM2)一种电磁铁。当电磁铁被通电的状态,电磁铁(MM1、MM2)产生磁力;当电磁铁被断电的状态,电磁铁(MM1、MM2)失去磁力。对于条筒C1的磁铁块(M1、M2)是一种有永久磁力的磁铁块或者金属块。
这样的有益之处是,当AGV车的电磁铁(MM1、MM2)被通电的时候,产生磁力,与条筒的磁铁块(M1、M2)互相吸引(对应的MM1和M1,MM2和M2磁性相反);进而AGV车借助磁力作用将条筒C1紧紧地夹持。而且AGV车的夹持面(即是夹持条筒的工作面)设计成一种凹型结构(Y1)或者一种凹弧形结构(Y2),见图6和图8所示Y1和Y2。在这两个有益的设计作用下,一方面AGV车A1和条筒C1之间通过磁力吸引,一方面由于独有的凹型设计的夹持面,条筒C1被AGV车A1夹持住,在搬运过程中有效地防止发生倾倒。当AGV车A1的电磁铁(MM1、MM2)被断电状态,电磁铁(MM1、MM2)失去磁力作用,从而与条筒C1的磁铁块(M1、M2)没有吸引作用。这样一来,当AGV车A1将条筒C1搬运到指定目的位置,由于电磁铁(MM1、MM2)和磁铁块(M1、M2)没有磁力,AGV车A1轻松地将条筒C1放下。
实施例3具体的工作过程如下详解。
图3和图4中,AGV车A1有4个电磁铁(MM1、MM2)分别安装在AGV车的夹持面,即是与条筒C1的夹持工作面;一个AGV车的控制杆L2,安装在AGV车A1的夹持面,当条筒C1被夹持的状态,AGV车A1的控制杆L2能够控制条筒的控制杆L1,如图3所示,AGV车A1的控制杆L2在条筒C1的控制杆L1的上方。
矩形条筒C1的与AGV车A1的夹持面,即是条筒C1的短侧面,有4个磁铁块(M1、M2)分别对应于AGV车A1的电磁铁(MM1、MM2),对应的磁铁(M1与MM1,M2与MM2)极性相反,相互之间互相吸引。一个条筒控制杆L1安装在条筒C1的夹持面,通过一个连杆装置1和4个脚轮2相连接(如图4所示)。条筒控制杆L1控制脚轮2收缩或者放下的工作过程见实施例1所述。在本实施例3中,AGV车A1通过AGV车A1的控制杆L2,控制条筒控制杆L1,从而借助连杆装置1,将条筒2收缩或者放下。
本实施例3中,如图3和图4所示,是AGV车A1夹持矩形条筒C1的示意图。电磁铁(MM1、MM2)处于通电状态,电磁铁(MM1、MM2)和条筒C1的磁铁块(M1、M2)之间有磁力,从而将条筒紧紧夹持在AGV车A1的凹型夹持臂里。有益之处是:AGV车A1和条筒C1之间紧紧夹持在一起,同时脚轮2处在被放下的状态,可以自由地移动。从而AGV车A1可以将条筒C1自由地移动。
当AGV车A1将条筒C1运输到指定的目的地,AGV车A1的控制杆L2,沿着F7的方向移动,到达新的位置S3,从而控制条筒控制杆L1的移动,进一步,条筒控制杆L1,借助连杆装置1,将脚轮2分别沿着F1和F2方向收缩进条筒C1的底座N内(见图1所示)。在这个状态下,条筒C1通过底座N与接触面接触,从而保持“静止”。进一步,AGV车A1的电磁铁(MM1、MM2)被断电,失去与条筒磁铁块(M1、M2)之间的磁力作用。AGV车A1轻松地将条筒C1放下,离开条筒C1进行下一步工作。
在实际生产中,可以基于实施例3的工作方法,实现AGV车A1将条筒C1在各个纺纱设备之间进行搬运。不同于传统地搬运矩形条筒的方法,本实施例3中,AGV车A1与条筒C1之间: 1)AGV车搬运条筒C1过程中个,相互之间有磁力作用;2)AGV车A1的夹持面成凹型结构(对于矩形条筒),或者凹弧形结构(对于圆形),从而让条筒C1和AGV车A1之间紧密包合;3)条筒C1的脚轮2有两个不同的状态:脚轮收缩进底座,变成一个“不带脚轮的条筒”和脚轮从底座放下,变成一个“带脚轮的条筒”。 从而实现了一种低能耗稳定可靠的条筒搬运流程。
实施例4:
如图5和图6所示,是本发明的一个带有电磁铁的AGV车夹持矩形条筒的凹型侧视图和俯视图。
在图5和图6中,AGV车A1带有电磁铁(MM1、MM2),条筒C1是一种矩形条筒,带有磁铁块(M1、M2)。AGV车A1的电磁铁(MM1、MM2)和条筒C1的磁铁块(M1、M2)之间有磁力作用,将条筒C1夹持在AGV车A1的凹型夹持面。如图6所示,从俯视角度,AGV车A1的夹持面是一个类似凹型结构Y1。其中,条筒C1的短侧面与AGV车A1的夹持面之间的距离用“a”标示,本发明称之为“条筒与AGV车之间的间隙距离”。AGV车A1的凹型结构的凹陷程度,用距离“b”标示,本发明称之为“AGV车的凹陷距离”如图6所示。在本实施例中,a的距离是2mm,b的距离是300mm。在本发明中,作为一个衡量AGV车A1抱合条筒C1的紧密度,“条筒与AGV车之间的间隙距离a”的范围是0-60mm,优选地是1-10mm;“AGV车的凹陷距离”b的范围是0-1500mm,优选地是20-500mm。这里的a的距离是AGV车夹持面和矩形条筒C1的短侧面之间、AGV车夹持面和矩形条筒C1的长侧面之间的距离。
实施例5:
如图7和图8所示,是本发明的一个带有电磁铁的AGV车夹持圆形条筒的凹弧形侧视图和俯视图。
本实施例5和实施例4的不同在于:本实施例5中的AGV车A2搬运的条筒C3是一种圆形条筒。圆形条筒C3是一个截面成圆形的柱状结构,不同于实施例4的矩形条筒C2(一种矩形结构)。根据圆形条筒C3的圆柱形结构,AGV车A2的夹持面如图8所示,采用一种凹弧形结构。
在图7和图8中,AGV车A2带有电磁铁(MM1、MM2),条筒C3是一种圆形条筒,带有磁铁块(M1、M2)。AGV车A2的电磁铁(MM1、MM2)和条筒C3的磁铁块(M1、M2)之间有磁力作用,将条筒C3夹持在AGV车A2的凹弧形夹持面。如图8所示,从俯视角度,AGV车A2的夹持面是一个类似凹弧形Y2。其中,条筒C3的圆弧侧面与AGV车A1的夹持面之间的距离用“a”标示,本发明称之为“条筒与AGV车之间的间隙距离”。AGV车A2的凹弧形的凹陷程度,用距离“b”标示,本发明称之为“AGV车的凹陷距离”如图8所示。在本实施例中,a的距离是2mm,b的距离是200mm。在本发明中,作为一个衡量AGV车A2抱合条筒C3的紧密度,“条筒与AGV车之间的间隙距离a”的范围是0-60mm,优选地是1-10mm;“AGV车的凹陷距离”b的范围是0-1500mm,优选地是20-500mm。这里的a的距离是AGV车A2夹持面和矩形条筒C3的圆弧侧面之间的距离。
在实施例4和5中,提出两种AGV车(A1和A2)的凹型和凹弧形夹持面,分别针对是矩形条筒C1和圆形条筒C3。不同于其他发明提出的一种夹持臂的AGV车。本发明有益之处是:结合AGV车的电磁铁和条筒磁铁块之间的磁力,和AGV车的凹型夹持面与条筒紧密地抱合在一起,同时借助于条筒的脚轮自由移动,实现了一种稳定可靠的自动条筒运输系统。
实施例6:
如图9所示,一个本发明的AGV车(A1)搬运2个矩形条筒(C1)的俯视图。相对于搬运一个矩形条筒(C1),本发明的AGV车(A1)页可以同时搬运2个或者更多的条筒(C1),如图9所示,作为一个合适的优选实施例,AGV车(A1)同时搬运2个矩形条筒(C1)。
实施例7:
如图10所示,为一个本发明AGV车(A2)同时搬运2个圆形条筒(C3)的俯视示意图。同样地,相对于搬运一个圆形条筒(C3),AGV车(A2)搬运2个或者多个圆形条筒(C2)有更高的搬运效率和节约搬运时间。作为一个优选的实施例,本实施中,AGV车(A2)同时搬运2个圆形条筒(C3)。
本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但不会偏离本发明的原理或者权利要求书定义的范围。
- 一种有收放式脚轮的容器和AGV车以及搬运容器方法
- 一种AGV自行搬运车脚轮提升装置