渣土转运机及渣土转运至船上的方法
文献发布时间:2023-06-19 12:08:44
技术领域
本发明属于建筑垃圾清理领域,涉及渣土处理设备,尤其涉及一种渣土转运至船上的方法。
背景技术
渣土(建筑垃圾)处理时需要船运,对于宽广的河流区域和大型运输船只来说,可以使货车直接将渣土倾倒至船只中。
但是对于小型船只来说,现有技术是将整车的垃圾倾倒在一个坑位中,然后用挖掘机一次次的转料到船上,效率非常的慢。
但是如果将整车渣土从高处卸料,船上会受到巨大的冲击,容易发生冲击惯性的安全问题。例如会翻船,又例如渣土有钢筋和石块,如果40吨渣土在3米高度倾倒则会直接贯穿小型船只的船身。
因此需要快速且安全的转运方式。
发明内容
本发明的目的是针对现有的上述问题,提供一种渣土转运至船上的方法和渣土转运装置。
本发明的目的可通过下列技术方案来实现:渣土转运至船上的方法,其特征在于,它包括以下步骤:
步骤a、选取由钢丝绳悬吊的料斗,料斗顶部能直接装料,料斗的下方也能打开卸料,钢丝绳连接可旋转的垂挂驱动装置;
步骤b、调整料斗的高度,货车的渣土直接倾倒至料斗顶部,由料斗承载渣土;
步骤c、检测料斗与船底的距离,下降料斗至安全位置,打开料斗,提升卸下渣土;
步骤d、重复步骤c的过程,对渣土的高度进行检测,达到设定高度时停止。
进一步的,步骤a中钢丝绳承受强度大于料斗中料的重力,对料斗中料的重力进行监测,钢丝绳承受强度小于船体负载,不同船体的负载标准通过选取钢丝绳强度等级进行调节。
进一步的,步骤c中料斗下降至压到船底,初始时使船体吃水下沉。
进一步的,步骤d中垂挂驱动装置上设有高度传感器,高度传感器向下探测渣土顶面的高度,达到预设值后进行反馈。
进一步的,步骤d中垂挂驱动装置上设有高度传感器,高度传感器向下探测渣土顶面的高度H,再加上一料斗渣土的预设高度h, H+h≥预设值M后进行反馈。
进一步的,选取多组料斗同时向船体转运渣土,料斗沿着船身延伸方向排列。
进一步的,步骤b中,在料斗上设有重力传感器,并对每车渣土进行称量。
渣土转运机,其特征在于,包括垂挂驱动装置和料斗,料斗与垂挂驱动装置之间由钢丝绳连接,所述料斗顶部设有进料口,料斗包括两个能合拢的料臂和上支架,所述料臂的上方铰接在上支架上,两料臂的下方靠在一起,所述两料臂内侧各铰接一根支杆,支杆另外一端铰接在螺母上,螺母与丝杆螺纹连接,丝杆连接电机,电机固定在上支架上。
进一步的,所述两个料臂和上支架形成三角形。
进一步的,一个料臂下方固定锁杆,锁杆穿过另外一个料臂并在该料臂上设有电动推杆,所述锁杆上设有销孔,电动推杆能插入销孔中。
与现有技术相比,本发明可以直接将整车的渣土倾倒至料斗中,转运速度很快,然后料斗降到船底一边打开一边提升,减小了渣土对船底的冲击,整个过程也能对渣土高度进行检测,防止堆叠过高。用钢丝绳对渣土进行负载的限定,每次转运不能超过限值。也设有重力传感器,能对每车渣土重量测量,防止传统地磅测量时的作弊。
附图说明
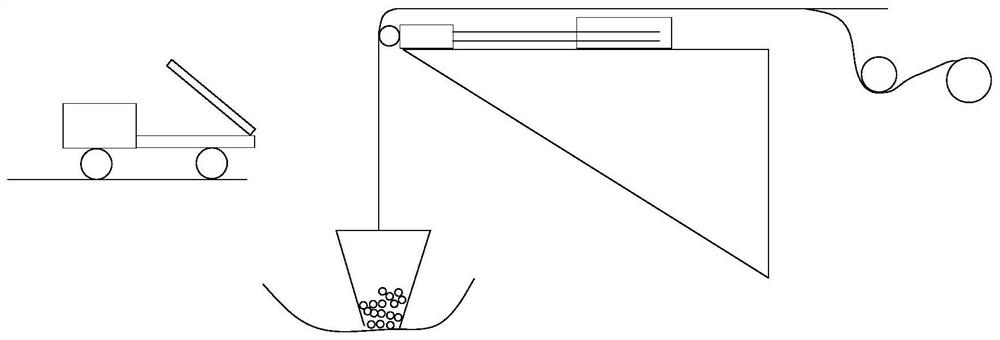
图1为本发明的初始状态示意图。
图2为相对图1的料斗位移示意图。
图3为货车倾倒示意图。
图4为料斗卸料示意图。
图5为料斗合拢示意图。
图6为料斗打开示意图。
图中1船体;2料斗;21上支架;22螺母;23电机;24上铰接点;25料臂;26 电动推杆;27锁杆;28支杆;211丝杆;222进料口;233卸料嘴;3导向轮一;4气缸;5滑轮组;6绞盘。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含。
图1、图5、图6所示,本发明的渣土转运装置,包括垂挂驱动装置和料斗2,料斗2与垂挂驱动装置之间由钢丝绳连接。
垂挂驱动装置可以旋转,能调节料斗2位置,也能提升或下降料斗2,可以有控制器自动控制。
垂挂驱动装置包括基座,基座上设有气缸4,气缸4的活塞连接导向轮一3,所述的钢丝绳绕过导向轮一3,钢丝绳一边向下悬挂,另外一边连接滑轮组5,然后与绞盘6连接。
导向轮一3能进行位置调节,料斗2因此可以横向的移动。
料斗2顶部设有进料口222,料斗2包括两个能合拢的料臂25和上支架21,两个料臂25和上支架21形成三角形。料臂25的上铰接点24连接在上支架21两端,两料臂25的下方靠在一起,两料臂25内侧各铰接一根支杆28,支杆28另外一端铰接在螺母22上,螺母22与丝杆211螺纹连接,丝杆211连接电机23,电机23固定在上支架21上。
两料臂25打开后下方的卸料嘴233卸料,单个的料臂25和现有贝壳抓斗一样,呈三面包围的结构。
为了加强料臂25的稳定性,因此在一个料臂25下方固定锁杆27,锁杆27穿过另外一个料臂25并在该料臂25上设有电动推杆26,所述锁杆27上设有销孔,电动推杆26能插入销孔中。上述锁杆27、电动推杆26都设在料臂25的一侧,可以防止渣土承载时对其影响。
图1-图4所示,转运方法包括以下步骤:
步骤a、选取由若干钢丝绳悬吊的料斗2,料斗2顶部能直接装料,料斗2的下方也能打开卸料,钢丝绳连接可旋转的垂挂驱动装置。
钢丝绳承受强度大于料斗2中料的重力,可以对料斗2中料的重力进行监测,同时钢丝绳承受强度小于船体1负载。优选的,料斗2上设有重力传感器,并对每车渣土进行称量,确保渣土不超过钢丝绳负载。超过设定标准则发出警报,同时启用备用方案。例如料斗2转动到岸上先进行局部卸料。
不同船体1的负载标准通过选取钢丝绳强度等级进行调节。
步骤b、调整料斗2的高度,图5-图6所示,货车的渣土直接倾倒至料斗2顶部敞开的进料口222内,继而由料斗2承载渣土。由于料斗2上设有重力传感器,可以对每车渣土进行称量,因此能取消地磅,防止货车跳磅作假,直接用称量的重量计算费用。
步骤c、检测料斗2与船底的距离,下降料斗2至安全位置,打开料斗2。此时,先解锁电动推杆26和锁杆27。料斗2的电机23驱动丝杆211,丝杆211驱动螺母22,然后支杆28向外撑开,两料臂25也打开。两料臂25打开后下方的卸料嘴233卸料。
料斗一边提升,一边卸下渣土。优选的,下降料斗2至船底,料斗2靠近船底后缓慢的打开料斗2,料斗2一边卸料一边抬升,料斗2下降至压到船底,初始时使船体1吃水下沉。
步骤d、重复步骤c,该步骤中检测料斗2与船上渣土最高面的距离,对渣土的高度进行检测。垂挂驱动装置上方设有高度传感器,高度传感器向下探测渣土顶面的高度H,再加上一料斗2渣土的预设高度h, H+h≥预设值M后进行反馈。
对于步骤d需要说明的是:一料斗2渣土取预设将会累积到渣土堆上的最大预想数值,例如,情况一:渣土堆H高度现在是4m,不能超过的M值为7.5m,现根据料斗2的大小预设一料斗2卸下形成高度最大的h是2m,那么就可以安全的卸料。情况二:渣土堆H高度现在是5m,不能超过的M值为7.5m,现根据料斗2的大小预设一料斗2卸下形成高度最大的h是2m,那么系统就认为会有问题而停止工作,或者发出警报,或者自动的排列式的卸到船舱另外区域。
以上的料斗2和垂挂驱动装置设有多组,选取多组料斗2同时向船体1转运渣土,料斗2沿着船身延伸的纵向排列。同时料斗2可以横向的移动,可以多位置的堆叠。以多组同步卸料的模式将会大大的提高装载渣土的速度。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
- 渣土转运机及渣土转运至船上的方法
- 一种智能桩孔内渣土吸土机及桩孔渣土自动抽吸方法