一种集成声呐通信的水下机械臂
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及机器人一体化关节领域,尤其涉及一种集成声呐通信的水下机械臂。
背景技术
随着陆地资源越来越匮乏,许多资源面临开发殆尽,近年来对海洋资源的开发成为趋势,但是在环境恶劣,水下作业空间狭窄的地方,人类显然无法胜任。
海洋资源的开发离不开水下机械臂,复杂环境下高适应性、高稳定性、高精度、抗冲击性、高续航成为水下机械臂性能的发展趋势。
有缆水下机械臂的控制比较简单,可由操作人员通过操作台实现人机交互控制。但水下机器人在水中的运动有六个自由度,它本身是一个强耦合的非线性系统,加上局部水流方向、流速都是无规则变化的,动力定位控制系统的刚度很难满足定点作业的要求,现有水下机器人一旦遇到突发的水流冲击,很容易对作业产生影响,存在着运动稳定性差的技术问题。
公开号为CN110758680B的专利文献公开了一种水下机器人、用于水域搜救的平台及其操作方法。一种水下机器人,包括:主体部分;布置在所述主体部分的侧面的多个推进器;经由上盖端部耦合的连接装置;以及传感器系统。一种包括上述水下机器人的用于水域搜救的平台,包括:在水面或水下航行的无人艇;以及装载在所述无人艇上方的控制仓。一种用于操作上述平台的方法,包括:接收释放命令;响应于接收到所述释放命令,释放所述水下机器人到预定深度;响应于所述水下机器人到达预定深度,接收作业命令以使所述水下机器人开展作业。该申请解决运动稳定性差的技术问题所用的技术手段为改变机器人外形,难以适用于各个方向的不同水流冲击。
发明内容
本发明要解决的技术问题是:现有水下机器人续航时间短、运动稳定性差的技术问题。
为解决上述技术问题,本发明提供一种集成声呐通信的水下机械臂,包括供电系统、水声通信系统、机械臂、稳定器以及控制器,所述机械臂包括壳体、谐波减速机、定子、转子以及刹车片,所述水声通信系统用于机械臂与岸上工作台的信息传递,所述稳定器检测水底信息并稳定机械臂位置,所述供电系统为其他部分供电。供电系统为安装在壳体内的电池,机械臂壳体有防水涂层且密封良好,该方案使得机械臂可以进行无线缆作业,集成的声呐系统可以在水中环境作业时检测周围环境,稳定器使得水下机械臂能够在恶劣环境下保持稳定作业。谐波减速机用于完成转子与其他机构的传动,刹车片用于停止机械臂的运动,避免撞击或位置偏差。
作为优选,水声通信系统包括水声通信机、水下声呐、水下声学释放器,所述水声通信机包括水上水声通信机以及水下水声通信机。
作为优选,包括输出轴、输入轴以及电动爪手,所述电动爪手与机械臂的输出轴连接,所述刹车片与机械臂的输入轴连接。
作为优选,所述声学释放器、水下声纳以及水下通信机均通过橡胶圈封装在壳体内,所述水下声呐检测机械臂与岸边的距离信息。
作为优选,还包括隔磁板,避免定子和转子产生的磁场对其他元件的干扰。
作为优选,所述稳定器包括检测端、弹簧、磁圈以及若干加强筋,所述弹簧置于磁圈内,弹簧一端与所述检测端连接,另一端与控制器信号输入端连接,当检测到检测端位移量大于设定值时,控制器启动声呐检测水流动向,随后控制器根据水流动向调整机械臂功率,稳定器根据水流动向调整加强筋的生效数量。检测端一端设有增大受力面积的凹坑,另一端通过刚性连杆与弹簧连接。声呐在没有人工操控时为了节省能源保持待机或周期性运作,当水流冲击到检测端使弹簧运动时,弹簧切割磁感线会产生电信号,控制器以此为触发信号启动声呐检测水流,当水流冲击力较大时,为了保持位置和外接电动爪手的精确抓取,需要调整电机输出对抗水流,增多受冲击方向的生效加强筋的数量,增大电动爪手和机械臂关节处的机械强度。
作为优选,所述检测端共计6个,分布在以机械臂输出轴为中心的八面体顶点处,下方的检测端在机械臂触底作业时收起。仅使用一个检测端,对于传感器的精度要求较大,检测范围较小,编码器对于同一个输入端输入的信息的处理步骤也会更复杂,远不如增设多个检测端的方案。为了避免检测端连杆的损坏,机械臂到达水底时需要收起下方的检测端。
本发明的实质性效果是1)通过水下机械臂安装电池供电系统,大大增加了机械臂水下作业的续航能力。
2)通过水声通信系统和稳定器可以实时检测水下机械臂周围环境,可以及时避开作业过程遇到的障碍物。
3)通过水下声呐装置,可以测量水下机械臂距离河床的距离,从而辅助机器人定位系统精确定位。
4)通过水声通信机,可以与水面工作站建立数据通信,水下水声通信机将声呐数据封装发送,水面水声通信机接收到的声呐数据解析,发给计算机处理存储。解决了现有水下机器人续航时间短、运动稳定性差的技术问题。
附图说明
图1是实施例一原理框图。
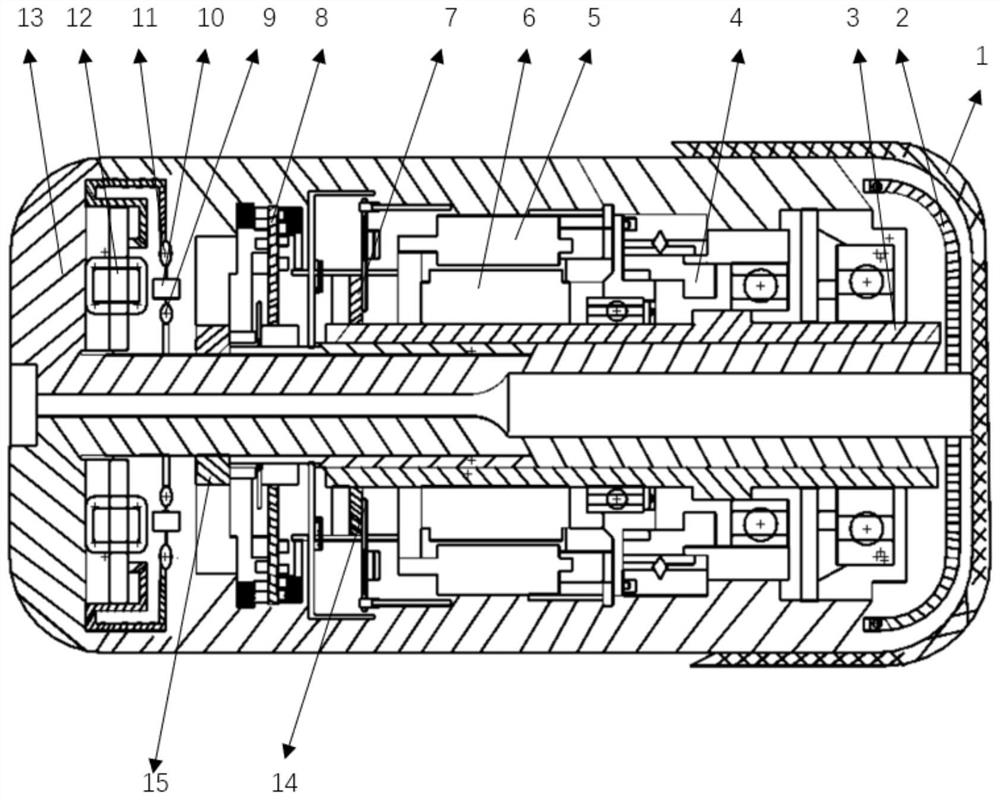
图2是实施例一机械臂结构示意图。
图3是实施例一水声通信系统示意图。
图4是实施例一稳定器示意图。
图中:1.壳体、2.电池供电系统、3.输入轴、4.谐波减速机、5.定子、6.转子、7.刹车片、8.编码器、9.声学释放器、10.水下声纳、11.水下水声通信机、12.橡胶圈、13.输出轴、14.隔磁板、15.弹性件、201.水上水声通信机、202.水上工作站、203.机械臂。
具体实施方式
下面通过具体实施例,并结合附图,对本发明的具体实施方式作进一步具体说明。
如图1所示,实施例一包括电池供电系统2、水声通信系统、数据存储系统以及水下机械臂控制卡,机械臂动力来源为电机,受编码器控制,本实施例编码器为绝对值编码器。机械臂的输入轴与刹车片连接。水声通信系统采集作业环境数据并作数据处理,发送运动指令给水下机械臂;水下机械臂运动控制卡再通过电机驱动器驱动电机动作,完成机械臂水下作业。
如图2或图3所示,实施例一的机械臂203包括编码器8、壳体1、弹性件15、隔磁板14、谐波减速机4、定子5、转子6以及刹车片7,所述水声通信系统用于机械臂与岸上工作台的信息传递,稳定器检测水底信息并稳定机械臂位置,供电系统为其他部分供电,弹性件15起到减震作用,刹车片7安装在输入轴3上。水声通信系统包括水声通信机、水下声呐10、水下声学释放器9,所述水声通信机包括水上水声通信机以及水下水声通信机11。声学释放器9、水下声纳以及水下通信机均通过橡胶圈12封装在壳体1内,所述水下声呐10检测机械臂与岸边的距离信息。声学释放器9、水下声纳以及水下通信机均通过橡胶圈12封装在壳体1内,所述水下声呐10检测机械臂与岸边的距离信息。实施例一还包括水上水声通信机201和水上工作站202。实施例一在作业时,水下声纳实时发送声波探测周围环境状况,将采集到的数据存储到水下水声通信机,经过水下水声通信机将声呐数据和水下机械臂运行状态发送到水上水声通信机,由水上水声通信机解析声呐数据,将解析得到的数据存储到计算机,计算机根据得到的数据信息分析水下机械臂作业情况。水上工作站通过水上水声通信机将工作指令转换成声呐数据传输给水下水声通信机11,水声通信系统和水下机械臂控制卡通信,水下机械臂得到指令进行动作。
实施例一还包括电动爪手,所述电动爪手与机械臂的输出轴13连接,用于进行物体抓取的作业。
如图4所示,所述稳定器包括检测端、弹簧、磁圈以及若干加强筋,所述弹簧置于磁圈内,弹簧一端与所述检测端连接,另一端与编码器8信号输入端连接,当检测到检测端位移量大于设定值时,编码器8启动声呐检测水流动向,随后编码器8根据水流动向调整机械臂功率,稳定器根据水流动向调整加强筋的生效数量。检测端一端设有增大受力面积的凹坑,另一端通过刚性连杆与弹簧连接。声呐在没有人工操控时为了节省能源保持待机或周期性运作,当水流冲击到检测端使弹簧运动时,弹簧切割磁感线会产生电信号,编码器8以此为触发信号启动声呐检测水流,当水流冲击力较大时,为了保持位置和外接电动爪手的精确抓取,需要调整电机输出对抗水流,增多受冲击方向的生效加强筋的数量,增大电动爪手和机械臂关节处的机械强度。
以上的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
- 一种集成声呐通信的水下机械臂
- 一种下视三维与下视多波束集成水下全景三维成像声呐