耳罩组装方法
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及耳罩的组装领域,尤其涉及一种耳罩组装方法。
背景技术
随着经济的不断发展及社会的不断进步,为人们的生活提供各式各样的电子消费品,而头戴式耳机就是诸多的电子消费品中的一种。
其中,对于头戴式耳机的耳罩来说,它是由外壳、外海绵、内壳、内海绵、内盖、外盖及耳环垫组成;组装时,首先,将外海绵放入外壳内;接着,将放有内海绵的内壳套装于外壳,并使外海绵夹于外壳与内壳之间;然后,将内盖盖合于内壳上,使内海绵夹紧内壳与内盖之间,紧接着将外盖盖合于外壳;最后,将耳环垫上的双面胶撕膜再贴于外盖上,从而完成耳罩的组装。
但是,上述耳罩的组装是靠操作人员手工完成,一方面增加操作人员的负担,另一方面降低了耳罩的组装效率。
因此,急需要一种能实现耳罩自动化组装的耳罩组装方法来克服上述的缺陷。
发明内容
本发明的目的在于提供一种能实现耳罩自动化组装的耳罩组装方法。
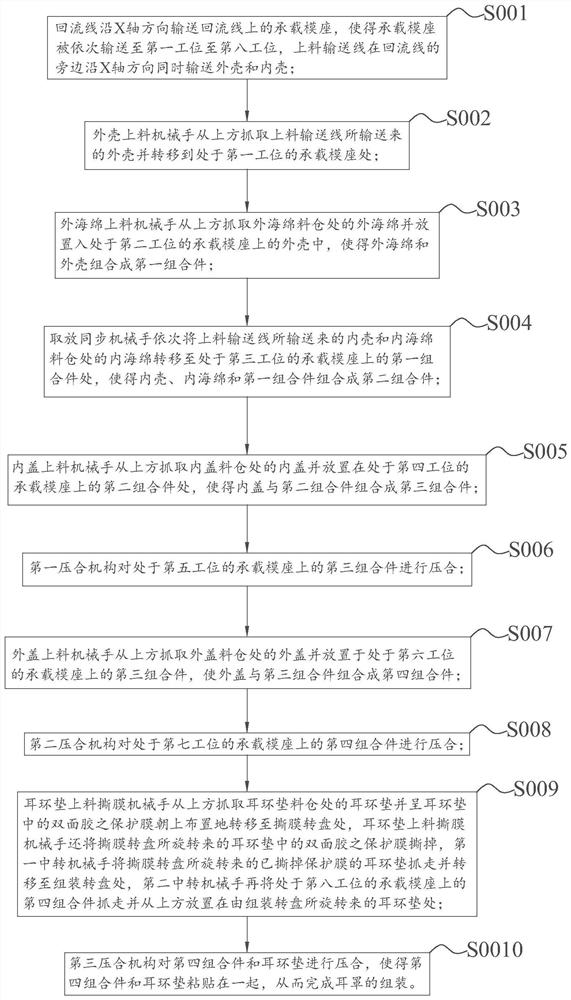
为实现上述目的,本发明的耳罩组装方法包括步骤有:(1)回流线沿X轴方向输送回流线上的承载模座,使得承载模座被依次输送至第一工位至第八工位,上料输送线在回流线的旁边沿X轴方向同时输送外壳和内壳;(2)外壳上料机械手从上方抓取上料输送线所输送来的外壳并转移到处于第一工位的承载模座处;(3)外海绵上料机械手从上方抓取外海绵料仓处的外海绵并放置入处于第二工位的承载模座上的外壳中,使得外海绵和外壳组合成第一组合件;(4)取放同步机械手依次将上料输送线所输送来的内壳和内海绵料仓处的内海绵转移至处于第三工位的承载模座上的第一组合件处,使得内壳、内海绵和第一组合件组合成第二组合件;(5)内盖上料机械手从上方抓取内盖料仓处的内盖并放置在处于第四工位的承载模座上的第二组合件处,使得内盖与第二组合件组合成第三组合件;(6)第一压合机构对处于第五工位的承载模座上的第三组合件进行压合;(7)外盖上料机械手从上方抓取外盖料仓处的外盖并放置于处于第六工位的承载模座上的第三组合件,使外盖与第三组合件组合成第四组合件;(8)第二压合机构对处于第七工位的承载模座上的第四组合件进行压合;(9)耳环垫上料撕膜机械手从上方抓取耳环垫料仓处的耳环垫并呈耳环垫中的双面胶之保护膜朝上布置地转移至撕膜转盘处,耳环垫上料撕膜机械手还将撕膜转盘所旋转来的耳环垫中的双面胶之保护膜撕掉,第一中转机械手将撕膜转盘所旋转来的已撕掉保护膜的耳环垫抓走并转移至组装转盘处,第二中转机械手再将处于第八工位的承载模座上的第四组合件抓走并从上方放置在由组装转盘所旋转来的耳环垫处;以及(10)第三压合机构对第四组合件和耳环垫进行压合,使得第四组合件和耳环垫粘贴在一起,从而完成耳罩的组装。
较佳地,在步骤(2)中,先由外壳抓取翻转机构将上料输送线所输送来的开口朝下的外壳抓起并翻转至使外壳的开口朝上布置后,外壳上料机械手再将外壳抓取翻转机构处的外壳取走。
较佳地,在步骤(2)中,外壳抓取翻转机构通过使外壳向上翻转180度而使得外壳的开口朝上布置。
较佳地,在步骤(4)中,先由内壳抓取翻转机构将上料输送线所输送来的开口朝下的内壳抓起并翻转至使内壳的开口朝上布置后,取放同步机械手再将内壳抓取翻转机构处的内壳取走。
较佳地,在步骤(4)中,内壳抓取翻转机构通过使内壳向上翻转180度而使得内壳的开口朝上布置。
较佳地,在步骤(4)中,取放同步机械手依次将上料输送线所输送来的内壳和内海绵料仓处的内海绵转移至转向机构处,再由转向机构使转向机构上的内壳和内海绵水平旋转180度后再放置在处于第三工位的承载模座上的第一组合件处。
较佳地,在步骤(4)中,取放同步机械手在抓取内壳抓取翻转机构所翻转后的内壳的同时,取放同步机械手还将从内海绵料仓处抓来的内海绵放置于转向机构处;或者,取放同步机械手将从内壳抓取翻转机构处抓来的内壳放置于转向机构处的同时,取放同步机械手还在内海绵料仓处抓取的内海绵。
较佳地,在步骤(1)中,上料输送线沿X轴的正向隔开输送外壳和内壳,回流线沿X轴的正向使承载模座依次输送至第一工位至第八工位处。
较佳地,本发明的耳罩组装方法还包括由下料机械手将组装转盘所旋转来的已组装好的耳罩取走的步骤。
较佳地,本发明的耳罩组装方法还包括由下料输送线对下料机械手所转送来的耳罩进行承接并使该耳罩被继续输送的步骤。
与现有技术相比,本发明的耳罩组装方法能实现耳罩的自动化组装,一方面降低了操作人员的负担,另一方面提高了组装效率,适应于自动化的作业场合。
附图说明
图1是本发明的耳罩组装方法的流程图。
图2是实施图1所示的耳罩组装方法的耳罩组装机的立体结构示意图。
图3a至图3e是本发明的耳罩组装方法相应步骤得到的组装流程图。
具体实施方式
为了详细说明本发明的技术内容、构造特征,以下结合实施方式并配合附图作进一步说明。
请参阅图2及图3b,用于实施本发明的耳罩组装方法的耳罩组装机100包括机架1、承载模座2及装配于机架1上的回流线3、上料输送线4、外海绵料仓5、内海绵料仓6、内盖料仓7、外盖料仓8、耳环垫料仓9、外壳上料机械手10a、外海绵上料机械手10b、取放同步机械手20、内盖上料机械手30a、外盖上料机械手30b、第一压合机构40a、第二压合机构40b、第三压合机构40c、耳环垫上料撕膜机械手50、撕膜转盘60a、组装转盘60b、第一中转机械手70a、第二中转机械手70、外壳抓取翻转机构80a、内壳抓取翻转机构80b、下料机械手80c、下料输送线80d及转向机构90。回流线3沿X轴方向延伸布置,承载模座2放置于回流线3并被回流线3沿X轴方向输送,以实现承载模座2在回流线3的输送下沿X轴方向做水平的平移;上料输送线4沿Y轴方向位于回流线3的后侧的旁边,上料输送线4还沿X轴方向延伸并用于输送外壳210和内壳220;外海绵料仓5、内海绵料仓6、内盖料仓7、外盖料仓8、耳环垫料仓9及撕膜转盘60a六者沿X轴方向依次隔开布置,外海绵料仓5和内海绵料仓6两者沿Y轴方向位于回流线3的前侧的旁边,内盖料仓7、外盖料仓8和耳环垫料仓9三者沿Y轴方向位于回流线3的旁边,较优的是,外海绵料仓5、内海绵料仓6、内盖料仓7、外盖料仓8、耳环垫料仓9及撕膜转盘60a六者沿X轴方向对齐排列,使得外海绵料仓5、内海绵料仓6、内盖料仓7、外盖料仓8、耳环垫料仓9及撕膜转盘60a均位于回流线3的前侧,这样设计减少机架1在Y轴方向(也可称为宽度)的尺寸,但不以此为限;外壳上料机械手10a、外海绵上料机械手10b、取放同步机械手20、内盖上料机械手30a、第一压合机构40a、外盖上料机械手30b和第二压合机构40b七者沿X轴方向依次隔开布置,且外壳上料机械手10a、外海绵上料机械手10b、取放同步机械手20、内盖上料机械手30a、第一压合机构40a、外盖上料机械手30b和第二压合机构40b各自沿Y轴方向横跨回流线3,以便于外壳上料机械手10a、外海绵上料机械手10b、取放同步机械手20、内盖上料机械手30a、第一压合机构40a、外盖上料机械手30b和第二压合机构40b七者从上方进行相应的作动;组装转盘60b沿Y轴方向与撕膜转盘60a隔开排列,较优的是,组装转盘60b沿X轴方向与回流线3隔开且对齐排列,这样使得回流线3与组装转盘60b之间的布局更紧凑,组装转盘60b还与撕膜转盘60a彼此对齐,但不以此为限;耳环垫上料撕膜机械手50位于耳环垫料仓9和撕膜转盘60a之间,第一中转机械手70a沿Y轴方向位于撕膜转盘60a和组装转盘60b之间,第二中转机械手70b沿X轴方向位于第二压合机构40b和组装转盘60b之间,第三压合机构40c位于组装转盘60b和第二中转机械手70a两者的侧旁;外壳抓取翻转机构80a和内壳抓取翻转机构80b各位于上料输送线4对应上方,外壳抓取翻转机构80a还位于外壳上料机械手10a的对应下方,内壳抓取翻转机构80b还位于取放同步机械手20的对应下方;下料输送线80d沿X轴方向延伸,下料输送线80d还位于组装转盘60b远离回流线3的一侧的旁边;下料机械手80c位于组装转盘60b与下料输送线80d之间;转向机构90沿X轴方向位于外海绵上料机械手10b和取放同步机械手20之间的转向机构90,转向机构90跨设于回流线3并位于取放同步机械手20的对应下方。具体地,在图2中,上料输送线4在Y轴方向被分隔出用于输送外壳210的第一输送线4a和用于输送内壳220的第二输送线4b,这样设计的目的是借助同一个上料输送线4而被分隔成两部分,在确保内壳220和外壳210被分开和同步输送的情况下达到节约成本的目的,但不以此为限。
请参阅图1及图3a至图3e,本发明的耳罩组装方法包括如下步骤:
S001、回流线3沿X轴方向输送回流线3上的承载模座2,使得承载模座2被依次输送至第一工位至第八工位,即承载模座2被输送至第一工位后,再由第一工位处输送到第二工位,以此类推;上料输送线4在回流线3的旁边(例如图1中的后侧的旁边)沿X轴方向同时输送外壳210和内壳220;具体地,在步骤S001中,上料输送线4沿X轴的正向隔开输送外壳210和内壳220,这样设计的目的是借助同一个上料输送线4而被分隔成两部分,即第一输送线4a和第二输送线4b,由第一输送线4a输送外壳210,由第二输送线4b输送内壳220,从而实现上料输送线4隔开输送外壳210和内壳220的目的,在确保内壳220和外壳210被分开和同步输送的情况下达到节约成本的目的;回流线3沿X轴的正向使承载模座2依次输送至第一工位至第八工位处,但不以此为限。
S002、外壳上料机械手10a从上方抓取上料输送线4所输送来的外壳210并转移到处于第一工位的承载模座2处;具体地,在步骤S002中,先由外壳抓取翻转机构80a将上料输送线4所输送来的开口211朝下的外壳210抓起并翻转至使外壳210的开口211朝上布置后,外壳上料机械手10a再将外壳抓取翻转机构80a处的外壳210取走,较优的是,外壳抓取翻转机构80a通过使外壳210向上翻转180度而使得外壳210的开口211朝上布置,这样设计的目的好处是:由于外壳210在被上料输送线4输送时借助其开口211与上料输送线4接触而不会乱窜,故被上料输送线4的输送更平稳可靠,有效地防止外壳210因开口211朝上而不与上料输送线4接触时造成在输送过程中乱窜,因而提高了外壳上料机械手10a将上料输送线4处的外壳210往承载模座2处转移的速度和效率。
S003、外海绵上料机械手10b从上方抓取外海绵料仓5处的外海绵230并放置入处于第二工位的承载模座2上的外壳210中,使得外海绵230和外壳210组合成第一组合件200a,状态见图3a所示。
S004、取放同步机械手20依次将上料输送线4所输送来的内壳220和内海绵料仓6处的内海绵240转移至处于第三工位的承载模座2上的第一组合件200a处,使得内壳220、内海绵240和第一组合件200a组合成第二组合件200b,状态见图3b所示;具体地,在步骤S004中,先由内壳抓取翻转机构80b将上料输送线4所输送来的开口221朝下的内壳220抓起并翻转至使内壳220的开口221朝上布置后,较优的是,内壳抓取翻转机构80b通过使内壳220向上翻转180度而使得内壳220的开口221朝上布置,取放同步机械手20再将内壳抓取翻转机构80b处的内壳220取走,这样设计的目的好处是:由于内壳220在被上料输送线4输送时借助其开口221与上料输送线4接触而不会乱窜,故被上料输送线4的输送更平稳可靠,有效地防止内壳220因开口221朝上而不与上料输送线4接触时造成在输送过程中乱窜,因而提高了取放同步机械手20将上料输送线4处的内壳220转移的速度和效率;更具体地,在步骤S004中,取放同步机械手20依次将上料输送线4所输送来的内壳220和内海绵料仓6处的内海绵240转移至转向机构90处,再由转向机构90使转向机构90上的内壳220和内海绵240水平旋转180度后再放置在处于第三工位的承载模座2上的第一组合件200a处,以借助转向机构90来确保由取放同步机械手20所取放的内壳220和内海绵240能正确地放置于第一组合件200a并与第一组合件200a组合成第二组合件200b;举例而言,在步骤S004中,取放同步机械手20在抓取内壳抓取翻转机构80b所翻转后的内壳220的同时,取放同步机械手20还将从内海绵料仓6处抓来的内海绵240放置于转向机构90处;或者,取放同步机械手20将从内壳抓取翻转机构80b处抓来的内壳220放置于转向机构60处的同时,取放同步机械手20还在内海绵料仓6处抓取的内海绵240,这样减少等待时间和提高工作效率。
S005、内盖上料机械手30a从上方抓取内盖料仓7处的内盖250并放置在处于第四工位的承载模座2上的第二组合件200b处,使得内盖250与第二组合件200b组合成第三组合件200c,状态见图3c所示。
S006、第一压合机构40a对处于第五工位的承载模座2上的第三组合件200c进行压合。
S007、外盖上料机械手30b从上方抓取外盖料仓8处的外盖260并放置于处于第六工位的承载模座2上的第三组合件200c,使外盖260与第三组合件200c组合成第四组合件200d,状态见图3d所示。
S008、第二压合机构40b对处于第七工位的承载模座2上的第四组合件200d进行压合。
S009、耳环垫上料撕膜机械手50从上方抓取耳环垫料仓9处的耳环垫270并呈耳环垫270中的双面胶之保护膜朝上布置地转移至撕膜转盘60a处,耳环垫上料撕膜机械手50还将撕膜转盘60a所旋转来的耳环垫270中的双面胶之保护膜撕掉,使得撕掉保护膜的粘贴面朝上布置;第一中转机械手70a将撕膜转盘60a所旋转来的已撕掉保护膜的耳环垫270抓走并转移至组装转盘60b处,第二中转机械手70b再将处于第八工位的承载模座2上的第四组合件200d抓走并从上方放置在由组装转盘60b所旋转来的耳环垫270处。以及
S010、第三压合机构40c对第四组合件200d和耳环垫270进行压合,使得第四组合件200d和耳环垫270粘贴在一起,从而完成耳罩200的组装,状态见图3e所示;具体地,为实现完成耳罩200的自动下料,本发明的耳罩组装方法还包括由下料机械手80c将组装转盘60c所旋转来的已组装好的耳罩200取走的步骤及由下料输送线80d对下料机械手80c所转送来的耳罩200进行承接并使该耳罩200被继续输送的步骤。
与现有技术相比,本发明的耳罩组装方法能实现耳罩的自动化组装,一方面降低了操作人员的负担,另一方面提高了组装效率,适应于自动化的作业场合。
值得注意者,前述的X轴方向、Y轴方向及Z轴方向以附图所示为准。另,为了提高自动化程度,本发明的耳罩组装机100可与一现有的控制器(例如但不限于此的PLC)电性连接。
以上所揭露的仅为本发明的较佳实例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属于本发明所涵盖的范围。
- 耳罩组装方法
- 耳罩及包括该耳罩的可头戴设备