一种高层建筑的对称悬挑钢桁架施工方法及施工结构
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及高层建筑施工技术领域,具体地说是一种高层建筑的对称悬挑钢桁架施工方法及施工钢结构。
背景技术
目前,国内的高层建筑方兴未艾,钢结构以其强度高、刚度大、随工周期短以及抗震能力强的诸多优势被人们广泛地应用在了超高层建筑中,各类钢结构施工技术也呈蓬勃发展趋势。
但是在超高层的环境下,钢结构的安装也同时面临着众多挑战,一般情况下,构件堆放场地狭小及构件繁多的冲突、塔吊性能偏低与重型构件的冲突以及高空作业与环境的冲突等等因素都时刻影响着钢结构安装和工程整体的进度,而超高层双塔之间的悬挑对称钢桁架造型施工,除了受上述因素影响之外还存在操作作业面小、钢桁架对接定位困难、精准定位难度大、重型结构吊装危险性高等难点。如何科学、有序、经济、合理地组织施工将对工程整体质量、进度及成本的有效控制起到关键性的作用。
发明内容
本发明的技术任务是针对以上不足之处,提供一种高层建筑的对称悬挑钢桁架施工方法及施工结构,能够提高施工质量,生产率高、施工进度快,可以节约工期、节省施工费用,经济与社会效益高。
本发明解决其技术问题所采用的技术方案是:
一种高层建筑的对称悬挑钢桁架施工方法,该方法对对称悬挑钢桁架进行地面拼装,整体提升、高工分离;包括以下步骤:
1)、建立对称悬挑钢桁架的BIM模型;
2)、对施工过程进行受力验算;
3)、制作地面拼装拼装胎架;
4)、地面拼装;
5)、整体提升;
6)、提升到位后高空分离;
其中,对施工过程的受力验算包括整体提升过程中悬挑桁架及主塔楼构件验算是否满足要求、提升到位后桁架与主塔楼焊接过程中杆件受力是否满足要求、以及高空分离过程及分离后主塔楼及桁架受力是否满足要求;
确定提升点坐标,桁架杆件地面拼装时按该提升点坐标进行拼装,使提升到位后与主塔楼连接杆件精准对接;
整体提升时利用各杆件控点的三维坐标数据建立拟合点楔形图,并与原BIM模型进行拟合,获取各杆件控制点的偏差数据,并根据所述偏差数据进行调整连接。
该方法能够解决底面施工场地狭小、异性结构定位困难,以及高空焊接难度大、危险性高的难题,对对称悬挑钢桁架进行地面拼装,整体提升、高工分离,能够提高施工质量和生产效率,节约施工费用,缩短工期。
优选的,左右两榀对称悬挑钢桁架拼装完成后,使用临时连杆连接,使其成为一个整体;临时连杆设置连接耳板及连接螺栓,临时连杆通过连接耳板与连接夹板栓接,并在提升就位并焊接完弦杆和腹杆且拆除提升器后拆除。
因临时连杆在拆除时悬挑桁架会发生结构体系转换,内力的突然释放可能会造成结构震动和位移,对操作人员有较大安全隐患,所以需设置长圆孔螺栓节点来缓冲或抵消结构变化。连接耳板与临时连杆焊接,连接耳板与连接夹板栓接,实现临时连杆与连接夹板的连接与拆卸。
优选的,所述建立对称悬挑钢桁架的BIM模型的步骤如下:
1)、根据施工要求建立整体模型的点坐标并形成线模型;
2)、利用所述线模型配合施工要求形成初步立体模型;
3)、对所述初步立体模型的每个节点单独细化;
4)、将节点细化后的所述初步立体模型叠放于主塔楼钢桁架所在楼层,并对齐原点。
进一步的,所述对施工过程进行受力验算的方式如下:
将模型数据导入计算软件,计算对称悬挑钢桁架在提升过程中的工况分析,通过杆件最大应力值及提升反力值,分析对称悬挑钢桁架的受力状态;
假设提升点不同位移值,通过杆件最大应力值及提升反力值,分析对称悬挑钢桁架的受力状态;
提升点不同位移值为20mm时,提升器的安全裕度系数均大于1.25,则满足提升安全要求;当杆件应力值均小于构件强度允许值,提升点不同位移值为20mm时,其提升器提升力和桁架杆件应力能够满足要求。
优选的,模拟桁架的施工并对施工过程进行受力验算,施工步骤包括:
建立钢桁架结构模型,建立提升牛腿、临时连杆及加强连杆,输入提升数据;
根据杆件重量数据,对所述杆件在地面整体拼装过程中的杆件受力进行计算分析;
根据所述钢桁架在提升过程中各个杆件的受力和变形情况进行模拟计算,提升平台的变形是否超限;
模拟提升到位后,对所述钢桁架进行临时连杆拆除时的受力分析计算。
优选的,所述地面拼装胎架包括:
胎架搭设,预起拱;
胎架底部抄平;
坐标定位;
拟复核胎架尺寸;
地面整体拼装步骤包括:
1)、建立拼装坐标系,将主桁架的三维立体模型放置于所述拼装坐标系;所述拼装坐标系以主杆件顶为原点,沿主杆件中线为X轴,垂直主杆件为Y轴,垂直验架平面向上为Z轴;
2)、从拼装坐标系中获取控制点坐标;
3)、根据所述控制点坐标,按照先主后次、先下后上的拼接顺序在所述胎架上进行杆件拼装;
4)、对称悬挑钢桁架拼装完成后,中间利用临时连杆将左右两榀桁架连接成为一个整体,临时连杆设置耳板及螺栓。
优选的,在现场建立一个随机坐标系,即任取地上的一个点作为坐标原点,任一个方向的一条直线为X轴,地面竖直向上为Z轴;
在随机坐标系中,使用全站仪测出各杆件控制点的三维坐标数据;
利用各杆件控制点的三维坐标数据建立一拟合点模型图,并与原模型进行拟合,获得各杆件控制点的偏差数据;
记录好收集到的各杆件控制点的数据,测量完全部杆件的控制点坐标后,将坐标输入CAD,建立拟合点模型图;
杆件控制点偏差数据数值在5m内,则拼装合格;杆件控制点偏差数据数值大于5m小于10m的,为尺寸做偏差,在现场安装中进行局部微调;杆件控制点偏差数据数值大于10m的,对该控制点相邻杆件重新调整连接,并使用全站仪重新测量复测,合格后方可满焊用于现场安装。
优选的,采用液压整体提升,
根据BIM模型定位桁架提升上吊点的位置;
利用BIM模型模拟拼装胎架安装过程,并获得拼装坐标数据;
将液压提升器安装到位,并根据所述拼装坐标数据对组件的实际安装位置进行调整,并将各提升器点焊固定;
比对点焊固定后的各组件的现场坐标和所述拼装坐标数据,在确认偏差在合理范围后将所述各组件之间满焊固定;
提升过程如下:
将液压提升器固定在所述提升平台上,提升钢绞线与提升吊点有效连接;
以6m/h的速度整体提升钢桁架,主控提升过程监测;
利用各杆件控点的三维坐标数据建立一拟合点楔形图,并与原BIM模型进行拟合,获得各杆件控制点的偏差数据;
当一杆件控制点偏差数据数值大于10m,对该控制点相邻杆件重新调整连接,并使用全站仪重新测量复测;
当观测数据无异常,焊接弦杆和腹杆后,撤除提升器。
优选的,对称悬挑钢桁架提升、补杆、焊接完成后,开始高空分离作业,
高空分离的步骤如下:
按由上层向下层逐层分割,一层切割完连杆并松完螺栓后拆除下一层;同一层的2根连杆同步切割,同步松螺栓;每根连杆首先将中间切开;
然后逐颗缓慢松开螺栓,最后切割临时连杆两端,高空分离作业;
钢桁架坐标复核。
本发明还要求保护一种高层建筑的对称悬挑钢桁架施工结构,在地面制作拼装胎架并进行地面拼装,整体提升后进行高空分离;
该结构通过上述的对称悬挑钢桁架施工方法实现对称悬挑钢桁架的地面拼装,整体提升、高工分离。
本发明的一种高层建筑的对称悬挑钢桁架施工方法及施工结构与现有技术相比,具有以下有益效果:
该方法及结构能够成功解决操作作业面小、钢桁架对接定位困难、精准定位难度大、重型结构吊装危险性高等难题,其施工质量可靠性强,生产效率高、施工进度快,能够节约工期、节省施工费用,具有良好的经济效益和社会效益,值得在高层建筑中推广应用。
附图说明
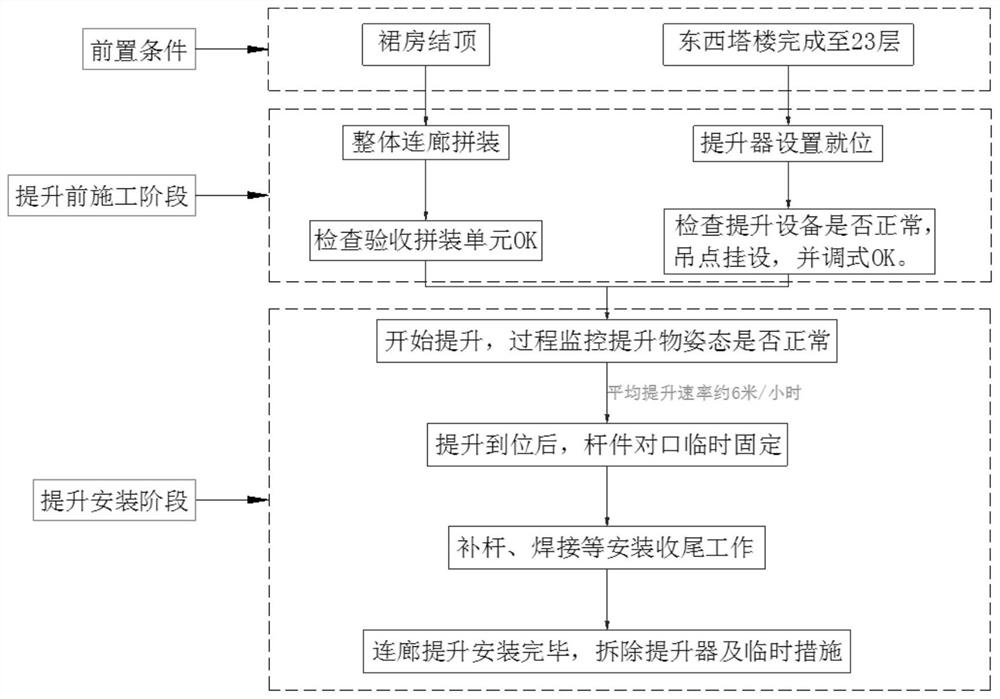
图1是本发明一种实施例提供的对称悬挑钢桁架施工方法的流程图;
图2是本发明一种实施例提供的对称悬挑钢桁架施工方法中桁架的结构示意图;
图3是本发明一种实施例提供的对称悬挑钢桁架施工方法中单层桁架的结构示意图;
图4是本发明一种实施例提供的对称悬挑钢桁架施工方法中连杆结构示意图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
本发明实施例提供一种高层建筑的对称悬挑钢桁架施工方法,该方法对对称悬挑钢桁架进行地面拼装,整体提升、高工分离。包括以下步骤:
1、建立对称悬挑钢桁架的BIM模型:
根据施工要求建立整体模型的点坐标并形成线模型;
利用所述线模型配合施工要求形成初步立体模型;
对所述初步立体模型的每个节点单独细化;
将节点细化后的所述初步立体模型叠放于主塔楼钢桁架所在楼层,并对齐原点。
2、模拟桁架的施工并对施工过程进行受力验算,施工步骤包括:
建立钢桁架结构模型,建立提升牛腿、临时连杆及加强连杆,输入提升数据;
根据杆件重量数据,对所述杆件在地面整体拼装过程中的杆件受力进行计算分析;
根据所述钢桁架在提升过程中各个杆件的受力和变形情况进行模拟计算,提升平台的变形是否超限;
模拟提升到位后,对所述钢桁架进行临时连杆拆除时的受力分析计算。
对施工过程进行受力验算包括:整体提升过程中悬挑桁架及主塔楼构件验算是否满足要求;提升到位后桁架与主塔楼焊接过程中杆件受力是否满足要求;高空分离过程及分离后主塔楼及桁架受力是否满足要求。
3、制作地面拼装拼装胎架:
胎架搭设,预起拱;
胎架底部抄平;
坐标定位;
拟复核胎架尺寸;
4、对称悬挑钢桁架地面拼装:
建立拼装坐标系,将主桁架的三维立体模型放置于所述拼装坐标系;所述拼装坐标系以主杆件顶为原点,沿主杆件中线为X轴,垂直主杆件为Y轴,垂直验架平面向上为Z轴;
2)、从拼装坐标系中获取控制点坐标;
3)、根据所述控制点坐标,按照先主后次、先下后上的拼接顺序在所述胎架上进行杆件拼装;
4)、对称悬挑钢桁架拼装完成后,中间利用临时连杆将左右两榀桁架连接成为一个整体,临时连杆设置耳板及螺栓。
5、液压整体提升:
将液压提升器固定在所述提升平台上,提升钢绞线与提升吊点有效连接;
桁架以6m/h的速度整体提升,主控提升过程监测;
利用各杆件控点的三维坐标数据建立一拟合点楔型图,并与原BIM模型进行拟合,获得各杆件控制点的偏差数据;
当一杆件控制点偏差数据数值大于10m,对该控制点相邻杆件重新调整连接,并使用全站仪重新测量复测;
当观测数据无异常,焊接弦杆和腹杆后,撤除提升器。
6、提升到位后高空分离,卸载完成。
高空分离须按由上层向下层逐层分割,一层切割完连杆并松完螺栓后拆除下一层,同一层的2根连杆同步切割,同步松螺栓,每根连杆首先将中间切开;
然后逐颗缓慢松开螺栓,最后切割临时连杆两端,高空分离作业。
桁架坐标复核。
结合图1-4所示,该对称悬挑钢桁架施工方法的具体实现过程如下:
首先,建立桁架的BIM模型:
步骤一:利用预设节点坐标列表,输入tekla中,建立整体模型的点坐标,根据侧视图和正视图,将节点连接成线模型;
步骤二:根据预设杆件截面图结合杆件截面尺寸表,利用线模型,将各连线作为杆件的定位控制轴线,运用三维建模、拉伸、放样等绘图命令生成初步立体模型;
步骤三:利用线模型简单生成的立体模型是不完整的,因未考虑到杆件与杆件的连接方式,杆件与杆件交点错位,多根杆件交叉在在同一个地方并嵌入其他杆件内部,造成节点不清,针对节点处的连接,结合钢结构节点做法,得出最优接连方式;
步骤四:将细节连接深化完成后的立体模型叠放于主塔楼结构模型上,将模型原点与平面图原点对齐,以便后续施工读取坐标用于现场定位安装。
然后,对施工过程进行受力验算:
将模型数据导入midas计算软件,计算钢桁架在提升过程中工况分析,通过杆件最大应力值及提升反力值,分析钢桁架受力状态;
假设提升点不同位移值,通过杆件最大应力值及提升反力值,分析钢桁架受力状态;
提升点不同步位移值为20mm时,液压提升器的安全裕度系数均大于1.25,满足提升安全要求;同时杆件应力值均小于构件强度允许值,当出现上述工况提升点不同步位移值为20mm时,其提升器提升力和桁架杆件应力能够满足要求。
接着,制作拼装胎架:
现场使用A194×12钢管搭设胎架,下部设口300×8方管连接,间距1500m,圆钢管与方钢管焊接,使整个胎架构成整体;制作胎架时,中间部位预起拱30mm,抵消因悬挑跨度大的变形沉降误差;
胎架底部抄平,胎槊底部根据底标高高差的不同,采用两种方式抄平:底标高相差不大的位置,,使用10m或20m高的钢板做垫板将标高调整到位;标高相差较大的位置测量具体的尺寸,直接使用28a工字钢垫平。
地面整体拼装:
以现场拼装施工方便、定位精准为前提,建立拼装坐标系,将底层钢架的三维立体模型放置于拼装坐标系中,以主杆件顶为原点,沿主杆件中线为X轴,垂直主杆件为Y轴,垂直验架平面向上为Z轴;
从拼装坐标系中获取控制点坐标;
根据控制点坐标,按照先主弦杆后次弦杆,先下后上的拼接序在胎架上进行杆件拼装;
左右两榀对称悬挑钢桁架拼装完成后,使用临时连杆连接,使其成为一个整体,临时连杆设置耳板及螺栓;
复核拼装钢桁架尺寸。
在现场建立一个随机坐标系,即任取地上的一个点作为至标原点,任一个方向的一条直线为X轴,地面竖直向上为Z轴;
在随机坐标系中,使用全站仪测出各杆件控制点的三维坐标数据;
利用各杆件控制点的三维坐标数据建立一拟合点模型图,并与原模型进行拟合,获得各杆件控制点的偏差数据;
记录好收集到的各杆件控制点的数据,测量完全部杆件的控制点坐标后,将坐标输入CAD中,可以建立一个拟合点模型图;
杆件控制点差数据数值在5m内,拼装合格,无须整改;
杆件控制点偏差数据数值大于5mm小于10m的,为尺寸做偏差,着重注意,该偏差尚可在现场安装中进行局部微调,故亦无须整改;
杆件控制点偏差数据数值大于10m的,对该控制点相邻杆件重新调整连接,并使用全站仪重新测量复测,合格后方可满焊用于现场安装。
液压整体提升:
将4台液压提升器分别固定在相应提升平台上,满足提升单元各吊点的理论提升反力的要求,使每台液压设备受载均匀;
采用钢绞线连接提升器与钢桁架下吊点,钢绞线规格为15.24mm,单根钢绞线破断力不小于260kN,钢绞线安全系数大于6.0;
张拉钢绞线,使得所有钢绞线均匀受力,整体提升速度约6米/小时;
整体提升钢桁架提升至接近安装标高暂停提升;
桁架提升单元与上部结构预装段(牛腿)对接,形成整体。
最后高空分离:
因临时连杆在拆除时悬挑桁架会发生结构体系转换,内力的突然释放可能会造成结构震动和位移,对操作人员有较大安全隐患,需设置长圆孔螺栓节点来缓冲或抵消结构变化,本实施例选择螺栓为M20,长圆孔短向22mm,长向37mm;
连接耳板与临时连杆焊接,连接耳板与连接夹板栓接,桁架中间6根临时连杆须在提升就位并焊接完弦杆和腹杆且撤除提升器后,方可拆除;
卸载连杆时须按由上层向下层逐层卸载(一层切割完连杆并松完螺栓后拆除下一层),同一层的2根连杆同步切割,同步松螺栓;
每根连杆首先将中间切开,然后逐颗缓慢松开螺栓,最后切割临时连杆两端,高空分离作业。
本发明实施例还提供一种高层建筑的对称悬挑钢桁架施工结构,在地面制作拼装胎架并进行地面拼装,整体提升后进行高空分离,该结构通过上述实施例中描述的对称悬挑钢桁架施工方法进行施工,实现对称悬挑钢桁架的地面拼装,整体提升、高工分离。
该施工结构通过建立桁架的BIM模型、对施工过程进行受力验算、制作地面拼装胎架及地面拼装实现结构的整体拼装,并将拼装结构进行液压整体提升,并在提升到位后高空分离。
其中,建立钢结构桁架的BIM模型步骤包括:根据施工图纸及施工方案,建立东西两座塔楼的建筑模型,包括液压提升器所需牛腿。
建立悬挑桁架的结构模型,细化施工节点,包括悬挑桁架的整体提升的临时连杆、补强连杆及提升牛腿。
将细化后的桁架模型放于东西两座塔楼位置,形成完整建筑信息模型。
对施工过程进行受力验算步骤包括:整体提升过程中悬挑桁架及主塔楼构件验算是否满足要求;提升到位后桁架与主塔楼焊接过程中杆件受力是否满足要求;高空分离过程及分离后主塔楼及桁架受力是否满足要求。
建立钢桁架结构模型,建立提升牛腿、临时连杆及加强连杆,输入提升数据;
根据杆件重量数据,对所述杆件在地面整体拼装过程中的杆件受力进行计算分析;
根据所述钢桁架在提升过程中各个杆件的受力和变形情况进行模拟计算,提升平台的变形是否超限;
模拟提升到位后,对所述钢桁架进行临时连杆拆除时的受力分析计算。
地面拼装步骤包括:
放线,确定提升点坐标,桁架杆件地面拼装按此坐标拼装,使提升到位后与主塔楼连接杆件精准对接;
拼装胎架制作,根据桁架外形尺寸,制作拼装胎架,其能够承受所有桁架荷载及施工荷载;
确定胎架标高;
桁架拼装,根据桁架的BIM模型及控制坐标点,按照先下弦杆后上弦杆,先主弦杆后次弦杆的顺序拼装。
拼装完毕后复核拼装尺寸,利用全站仪测出各杆件控制点三维坐标数据。
液压整体提升包括步骤:
液压提升器就位固定,将4套液压提升器固定于主塔楼钢柱的提升牛腿;
用提升钢绞线将液压提升器与桁架连接在一起;
采用电器同步控制系统,使4台液压提升器以6m/h匀速提升,液压同步提升通过计算机控制各提升点同步,提升过程中构件保持平稳的提升姿态,同步控制精度高。
提升下吊点通过专用吊具与主桁架下弦杆外挑平台焊接连接,均在工厂与构件一起加工制作为一体,提升单元在整体提升过程中主要承受自重产生的垂直荷载。下吊点分别垂直对应每一上吊点设置在待提升的单元上。
所述对称悬挑钢桁架采用整体提升法进行施工,需通过临时连杆(B600X400X25X25,Q345)将东西侧悬挑桁架连接成整体,形成类似整体桁架形式后采用整体提升方式进行安装。
因临时连杆在拆除时悬挑桁架会发生结构体系转换,内力的突然释放可能会造成结构震动和位移,对操作人员有较大安全隐患,需设置长圆孔螺栓节点来缓冲或抵消结构变化(其中螺栓为M20,长圆孔短向22mm,长向37mm),连接耳板与临时连杆焊接,连接耳板与连接夹板栓接,桁架中间6根临时连杆须在提升就位并焊接完弦杆和腹杆且撤除提升器后,方可拆除。
提升钢桁架步骤包括:
根据BIM模型定位桁架提升上吊点的位置;
利用BIM模型模拟拼装胎架安装过程,并获得拼装坐标数据;
使用将液压提升器安装到位,并根据所述拼装坐标据对组件的实际安装位置行调整并将各提升器点焊固定;
比对点焊固定后的各组件的现场坐标和所述拼装坐标数据,在确认偏差在合理范后将所述各组件之间满焊固定。
高空分离步骤包括:
对称悬挑钢桁架提升、补杆、焊接完成后,开始高空分离作业;
分离临时连杆时须按由上层向下层逐层卸载(一层切割完连杆并松完螺栓后拆除下一层),同一层的2根连杆同步切割,同步松螺栓,每根连杆首先将中间切开,然后逐颗缓慢松开螺栓,最后切割临时连杆两端,完成高空分离作业。
通过上面具体实施方式,所述技术领域的技术人员可容易的实现本发明。但是应当理解,本发明并不限于上述的具体实施方式。在公开的实施方式的基础上,所述技术领域的技术人员可任意组合不同的技术特征,从而实现不同的技术方案。
除说明书所述的技术特征外,均为本专业技术人员的已知技术。
- 一种高层建筑的对称悬挑钢桁架施工方法及施工结构
- 一种高层建筑巨型悬挑钢非对称结构整体提升施工工法