一种基于星海光量子链路传输的水下量子测距方法
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及水下目标高精度测距领域,特别涉及一种基于星海光量子链路传输的水下量子测距方法。
背景技术
传统水下测距技术主要是利用激光和超声波对目标进行测距,其原理为通过向目标发射测距信号,经目标反射回发射端,得到发射端到目标的时间差,进而计算可得发射端与目标之间的距离。传统水下激光测距技术易受信号稳定性和光的多径传播影响,不适合长距离测量。此外,水下超声波测距由于湍流环境下压力和温度导致声速改变,使得测量距离与实际距离产生较大误差。传统水下测距技术存在精度低、测量范围局限等问题,制约了我国海军对水下目标探测水平的提升。因此,水下测距技术的发展必须探索新型测距方法,而量子测距具有高精度、高保密性的优点,所以量子测距是未来水下测距技术的发展方向之一。
量子测距通过发射和接收纠缠光子对,利用纠缠光子对的高同步和高保密特性,根据二阶关联特性,对采集到的光子进行符合计数来计算光子的飞行时间,从而获得探测器与目标之间的距离。该方法可以达到厘米级测量精度,并且可以实现高精度、高安全的水下目标探测,更加适用于海域安防。
发明内容
本发明的目的是提出一种基于星海光量子链路传输的水下量子测距方法。相对于传统水下测距方法,本发明利用纠缠光量子的高同步和高保密特性,实现水下高精度目标测距。
本发明采用的技术方案为:一种基于星海光量子链路传输的水下量子测距方法,包括以下步骤:
步骤一:利用卫星与两个海面站(其中,不妨令海面站1为浮沉信标,海面站2为船舰)的望远镜发射信标光,通过瞄准跟踪(Acquisition Tracking and Pointing,ATP)技术,建立星海光量子链路;
步骤二:利用卫星上装载的连续窄线宽(其带宽为160MHz)半导体激光器产生泵浦光,由光纤收集后通过耦合器的微透镜进行光束汇聚;
步骤三:将泵浦光入射至周期极化磷酸氧钛钾(Periodically Poled KTP,PPKTP)晶体中,发生参量下转换,得到纠缠光子对;
步骤四:利用光路中的双色镜分离泵浦光和下转换光,并使其通过波长为 810nm的偏振分束器,将纠缠光子对分开;
步骤五:利用长通滤光片滤除环境中的干扰光,并通过光纤耦合器对纠缠光子进行收集;
步骤六:利用偏振分束器将纠缠光子对分离成信号光和闲置光,将信号光发射至浮沉信标,而将闲置光发射至船舰。
步骤七:在浮沉信标和船舰上分别装载单光子探测器1和单光子探测器2以收集信号光和闲置光,浮沉信标浮于水面的位置和船舰的位置由北斗卫星导航系统(BeiDouNavigation Satellite System,BDS)确定;
步骤八:当浮沉信标沉于水下时,联合捷联惯导系统、多普勒计程仪和压力传感器对其位置进行确定。具体而言,根据捷联惯导系统观测浮沉信标的运动特性并构建位置跟踪模型,再利用多普勒计程仪和压力传感器对浮沉信标的速度和深度进行校准,应用误差状态卡尔曼滤波方法实现对浮沉信标的位置跟踪;
步骤九:浮沉信标在下沉过程中不断发射信号光,并利用其装载的单光子探测器1探测被目标反射回来的信号光;
步骤十:对单光子探测器1和单光子探测器2输出的脉冲序列进行符合计数,得到信号光的飞行时间(即信号光从浮沉信标到达目标,并经目标反射回浮沉信标的总时间)Δt;
步骤十一:计算浮沉信标与目标之间的距离:
其中,v为光量子在水下的飞行速度。
所述步骤一中包括以下步骤:
步骤一(一):根据轨道预报生成的制导律,利用卫星上的二维转台载荷和粗跟踪探测器进行综合计算,并采用数据预测技术弥补数据源传输的时间差,计算转台的方位和俯仰角,完成卫星到海面站的指向;
步骤一(二):通过海面站的粗跟踪光闭环系统,根据星历表轨道预报和轨道坐标信息计算卫星所在位置,转动海面站上的二维转台以使上行信标光覆盖卫星所在的区域,完成海面站到卫星的指向;
步骤一(三):利用卫星的光学天线对海面站所在的区域进行扫描,并启动粗跟踪控制器调整扫描模式,以使卫星的粗跟踪探测器捕获到海面站发射的上行信标光;
步骤一(四):跟踪上行信标光,驱动卫星的二维转台以对光学天线进行指向调整,并将上行信标光引入精跟踪模块,然后将卫星转入精跟踪状态,保证上行信标光精确对准精跟踪探测器的中心,实现入射光轴与主光学天线光轴精确对准;
步骤一(五):类似上述卫星对上行信标光的处理过程,海面站对卫星发射的下行信标光进行相应的捕获﹑跟踪和瞄准,,实现星海光量子链路的建立;
所述步骤十中包括以下步骤:
步骤十(一):采集单光子探测器1和单光子探测器2输出的两路时间脉冲序列,并将其标识为信号光路CH1和闲置光路CH2;
步骤十(二):将CH1作为基本序列,对CH2的每个时间序列点加上某个给定的时延τ;
步骤十(三):设定符合门宽δ,对CH1和CH2进行一次符合计数,当符合门宽远小于待测光场的相干时间τ
其中,T为采集时间,R
步骤十(四):由公式(2),可得:
当R
此时,利用最小二乘法对得到的离散点(τ,g
附图说明
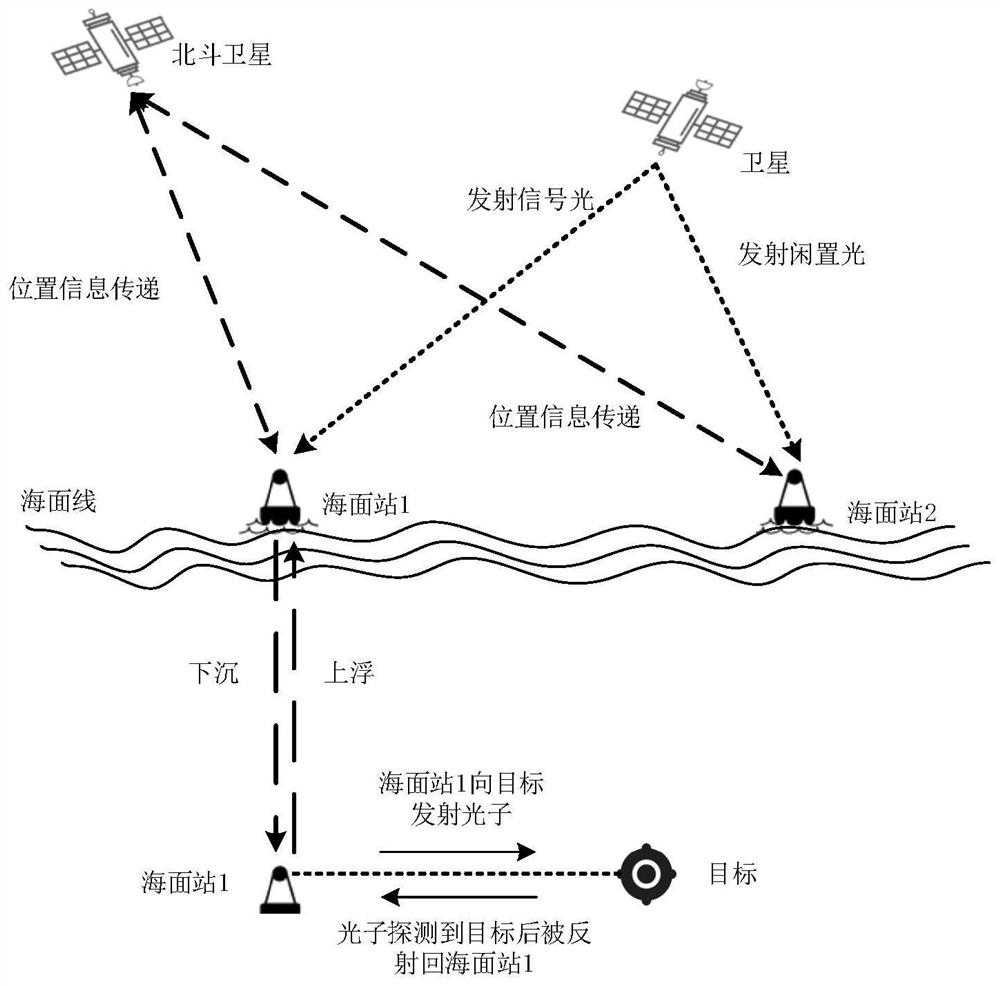
图1为本发明的整体方案示意图;
图2为本发明的星海光量子链路模型图;
图3为本发明的浮沉信标的位置跟踪模型流程图;
图4为本发明的符合测量流程图;
图5为本发明的符合计数示意图。
具体实施方式
下面结合附图进一步详细描述本发明的技术方案:
步骤一:利用卫星与两个海面站(其中,不妨令海面站1为浮沉信标,海面站2为船舰)的望远镜发射信标光,通过ATP技术,建立星海光量子链路;
步骤二:利用卫星上装载的连续窄线宽(其带宽为160MHz)半导体激光器产生泵浦光,由光纤收集后通过耦合器的微透镜进行光束汇聚;
步骤三:将泵浦光入射至PPKTP晶体中,发生参量下转换,得到纠缠光子对;
步骤四:利用光路中的双色镜分离泵浦光和下转换光,并使其通过波长为 810nm的偏振分束器,将纠缠光子对分开;
步骤五:利用长通滤光片滤除环境中的干扰光,并通过光纤耦合器对纠缠光子进行收集;
步骤六:利用偏振分束器将纠缠光子对分离成信号光和闲置光,将信号光发射至浮沉信标,而将闲置光发射至船舰。
步骤七:在浮沉信标和船舰上分别装载单光子探测器1和单光子探测器2以收集信号光和闲置光,浮沉信标浮于水面的位置和船舰的位置由BDS确定;
步骤八:当浮沉信标沉于水下时,联合捷联惯导系统、多普勒计程仪和压力传感器对其位置进行确定。具体而言,根据捷联惯导系统观测浮沉信标的运动特性并构建位置跟踪模型,再利用多普勒计程仪和压力传感器对浮沉信标的速度和深度进行校准,应用误差状态卡尔曼滤波方法实现对浮沉信标的位置跟踪;
步骤九:浮沉信标在下沉过程中不断发射信号光,并利用其装载的单光子探测器1探测被目标反射回来的信号光;
步骤十:采集单光子探测器1和单光子探测器2输出的两路时间脉冲序列,并将其分别标识为信号光路CH1和闲置光路CH2;
步骤十一:将CH1作为基本序列,对CH2的每个时间序列点加上某个给定的时延τ;
步骤十二:设定符合门宽δ,对CH1和CH2进行一次符合计数,当符合门宽远小于待测光场的相干时间τ
其中,T为采集时间,R
步骤十三:由公式(5),可得:
当R
此时,利用最小二乘法对所得到的离散点(τ,g
步骤十四:计算浮沉信标与目标之间的距离:
其中,v为光量子在水下的飞行速度。
所述步骤一中包括以下步骤:
步骤一(一):根据轨道预报生成的制导律,利用卫星上的二维转台载荷和粗跟踪探测器进行综合计算,并采用数据预测技术弥补数据源传输的时间差,计算转台的方位和俯仰角,完成卫星到海面站的指向;
步骤一(二):通过海面站的粗跟踪光闭环系统,根据星历表轨道预报和轨道坐标信息计算卫星所在位置,转动海面站上的二维转台以使上行信标光覆盖卫星所在的区域,完成海面站到卫星的指向;
步骤一(三):利用卫星的光学天线对海面站所在的区域进行扫描,并启动粗跟踪控制器调整扫描模式,以使卫星的粗跟踪探测器捕获到海面站发射的上行信标光;
步骤一(四):跟踪上行信标光,驱动卫星的二维转台以对光学天线进行指向调整,并将上行信标光引入精跟踪模块,然后将卫星转入精跟踪状态,保证上行信标光精确对准精跟踪探测器的中心,实现入射光轴与主光学天线光轴的精确对准;
步骤一(五):类似上述卫星对上行信标光的处理过程,海面站对卫星发射的下行信标光进行相应的捕获、跟踪和瞄准,实现星海光量子链路的建立;
所述步骤八中包括以下步骤:
步骤八(一):将浮沉信标的BDS定位结果和短基线测姿结果作为捷联惯导系统的初始输入;
步骤八(二):在惯性测量单元的辅助下,观测浮沉信标的运动特性并构建导航方程;
步骤八(三):利用多普勒计程仪和压力传感器对浮沉信标的速度和深度进行校准,并将校准值和航向信息一并输入卡尔曼滤波器;
步骤八(四):利用误差状态卡尔曼滤波法计算出的系统误差状态,对捷联惯导系统进行实时修正,实现对浮沉信标的位置跟踪。
- 一种基于星海光量子链路传输的水下量子测距方法
- 一种具备测湿度功能的光量子测距仪及测距测湿度方法