一种利用转动力的光纤制造用自动定长高效切割装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及光纤制造领域,具体为一种利用转动力的光纤制造用自动定长高效切割装置。
背景技术
在现如今的信息发展过程中,光纤的使用极大的提高了信息发展的速度,从而使得在进行信息传输时能够更快的接收信息,极大的增加了信息的共享性,方便了人们对于信息的获取,而用于信息传递作用的光纤在进行制造时过程中更加的重要,有效保证信息传递的稳定性。
但是目前在进行光纤制造完毕后,需要对于光纤进行切割,而在进行人工切割时经常会存在切割的长度不一致,导致在进行使用时出现异常,人工进行二次接线会由于接触不良导致信息传输过程中不稳定现象,而长度过长会导致光纤浪费现象,不利于智能制造发展。
于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种利用转动力的光纤制造用自动定长高效切割装置,以期达到更具有更加实用价值性的目的。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种利用转动力的光纤制造用自动定长高效切割装置,具备自动对于光纤进行定长切割以及自动清洁光纤表面的优点,解决了人工进行切割时切割长度不一影响后期使用以及光纤表面污渍污染光纤的问题。
(二)技术方案
为实现自动对于光纤进行定长切割以及自动清洁光纤表面的目的,本发明提供如下技术方案:一种利用转动力的光纤制造用自动定长高效切割装置,包括光纤外壳,所述光纤外壳的内部固定连接有定长机构,所述定长机构的右侧固定连接有充能机构,所述充能机构的底部固定连接有切割机构,所述光纤外壳的内部活动连接有除污机构。
进一步的,所述定长机构包括光纤转轮,光纤转轮表面固定连接有半齿轮,半齿轮的顶部啮合有主动齿条,主动齿条的表面转动连接有棘齿啮合轮,棘齿啮合轮的顶部啮合有啮合齿条,主动齿条的表面活动连接有固定拨动轮,光纤外壳的内部固定连接杆有挤压拨头,棘齿啮合轮的内部活动连接有棘齿,棘齿的表面固定连接有棘齿簧,棘齿簧远离棘齿的一端与棘齿啮合轮的内部固定连接,主动齿条的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接,主动齿条的左端固定连接有复位簧,复位簧远离主动齿条的一端与光纤外壳的内部固定连接,光纤外壳的内壁固定连接有啮合齿条。
进一步的,所述充能机构包括压能块,压能块的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接,压能块的右端固定连接有充能簧,充能簧远离压能块的一端固定连接有使能滑块,使能滑块的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接,压能块的右侧活动连接有梯形滑块,梯形滑块的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接,梯形滑块的表面通过固定杆固定连接有阻挡板,阻挡板的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接,阻挡板的顶部固定连接有阻挡簧,阻挡簧远离阻挡板的一端与光纤外壳的内部固定连接。
进一步的,所述切割机构包括拉动块,拉动块的左端活动连接有切割摆杆,切割摆杆的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接,切割摆杆远离拉动块的一端活动连接有压动杠杆,压动杠杆的表面与光纤外壳的内部转动连接,压动杠杆远离切割摆杆的一端通过表面滑槽活动连接有切割头。
进一步的,所述除污机构包括去污甩块,去污甩块的顶部固定连接有甩动簧,去污甩块的表面活动连接有去污轴套,去污轴套的左侧面活动连接有轴套推力杆,轴套推力杆远离去污轴套的一端活动连接有去污滑块,去污滑块的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接,去污滑块表面活动连接有斜摆杆,斜摆杆远离去污滑块的一端活动连接有擦拭块,擦拭块的表面通过光纤外壳内部开设的滑槽与光纤外壳的内部活动连接。
进一步的,所述主动齿条的右侧固定连接有压能块,使能滑块的底部固定连接有拉动块,去污甩块的表面通过光纤转轮内部开设的滑槽与光纤转轮的内部活动连接,甩动簧远离去污甩块的一端与光纤转轮的内部固定连接,去污轴套的表面固定连接有轴心簧,轴心簧远离去污轴套的一端与光纤外壳的内部固定连接。
(三)有益效果
与现有技术相比,本发明提供了一种利用转动力的光纤制造用自动定长高效切割装置,具备以下有益效果:
1、该利用转动力的光纤制造用自动定长高效切割装置,通过当使用装置时,此时光纤线带动光纤转轮进行转动,光纤转轮的转动带动半齿轮进行转动,半齿轮的转动由于啮合作用带动主动齿条向右进行运动,主动齿条的运动带动棘齿啮合轮在啮合齿条的表面进行转动,且由于固定拨动轮的限位作用使得棘齿啮合轮不能进行回转,此时主动齿条一直向右进行运动,当运动至与最右端的挤压拨头触碰时,此时固定拨动轮被挤压拨头顶起无法与棘齿啮合轮进行啮合,此时在复位簧的作用下进行复位,当固定拨动轮触碰到最左端的挤压拨头时,此时棘齿啮合轮重新与固定拨动轮进行啮合工作,从而达到自动往复进行切割的触发功能,同时主动齿条在向右运动时,带动压能块向右进行运动,压能块的向右运动通过充能簧进行推动使能滑块向右运动,使能滑块的向右运动由于阻挡板的阻挡作用使得充能簧进行不断的压缩,当压能块向右运动触碰到梯形滑块后,此时带动梯形滑块向上运动,梯形滑块的向上运动通过连接杆带动阻挡板向上运动,阻挡板上升到一定位置后无法阻挡使能滑块,此时在充能簧的弹性势能作用下使能滑块瞬间向右弹出,从而达到自动对装置进行充能的功能,且使能滑块的向右运动带动拉动块向右进行运动,拉动块的向右运动带动切割摆杆顺着光纤外壳内部的滑槽向上进行运动,切割摆杆的向上运动带动压动杠杆进行逆时针转动,压动杠杆的逆时针转动带动切割头向下运动,此时切割头与其对称端将光纤进行切断,从而达到自动智能制造定长切割的功能。
2、该利用转动力的光纤制造用自动定长高效切割装置,通过当光纤转轮进行转动时,带动去污甩块进行离心运动,去污甩块的离心运动带动去污轴套向内进行运动,去污轴套的向内运动带动轴套推力杆进行摆动,轴套推力杆的摆动带动去污滑块向左进行运动,去污滑块的向左运动带动斜摆杆进行斜向下的摆动,此时带动擦拭块向下运动与其对称端接触光纤的表面,在光纤运动的过程中有效的对其表面进行擦拭,从而达到自动清洁光纤表面污渍的功能。
附图说明
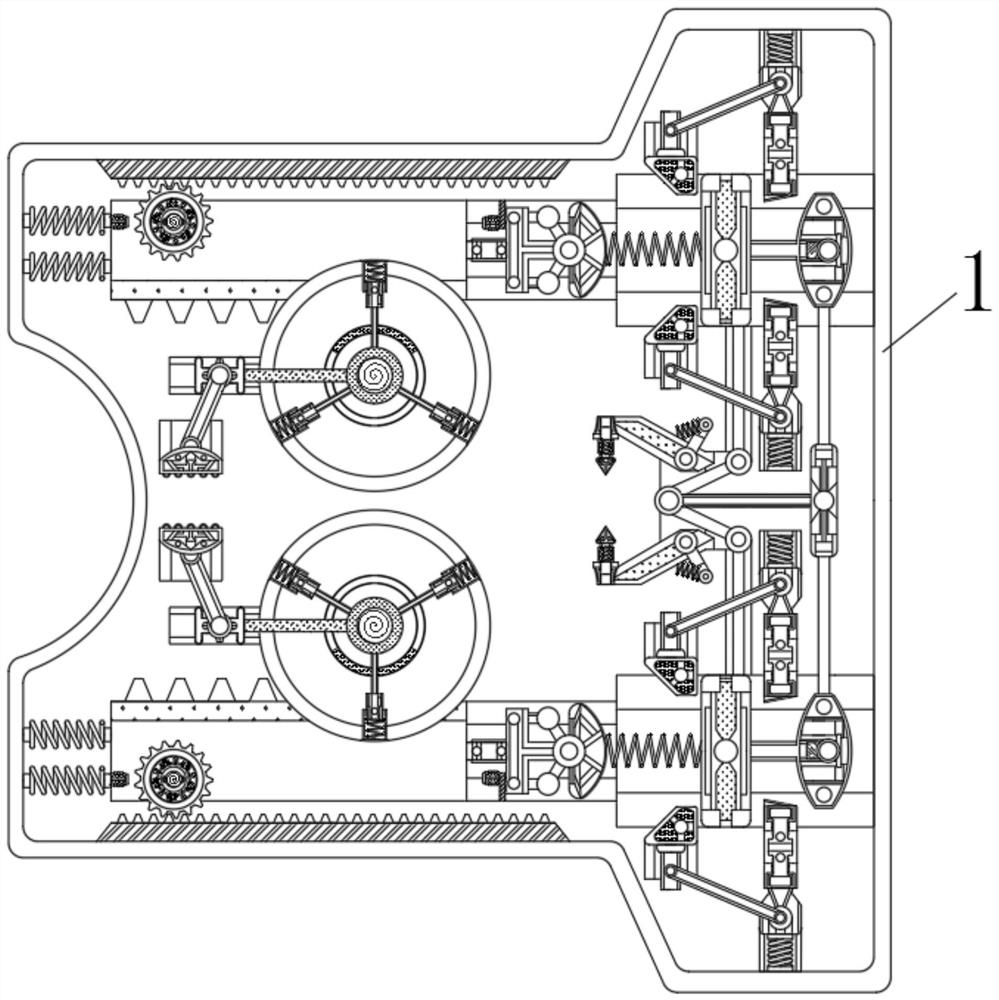
图1为本发明光纤外壳结构示意图;
图2为本发明啮合齿条结构示意图;
图3为本发明使能滑块结构示意图;
图4为本发明压动杠杆结构示意图;
图5为本发明轴套推力杆结构示意图。
图中:1、光纤外壳;2、定长机构;21、光纤转轮;22、半齿轮;23、主动齿条;24、棘齿啮合轮;25、啮合齿条;26、固定拨动轮;27、挤压拨头;3、充能机构;31、压能块;32、充能簧;33、梯形滑块;34、阻挡板;35、使能滑块;4、切割机构;41、拉动块;42、切割摆杆;43、压动杠杆;44、切割头;5、除污机构;51、去污甩块;52、去污轴套;53、轴套推力杆;54、去污滑块;55、斜摆杆;56、擦拭块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一:
请参阅图1和图2和图3和图4,一种利用转动力的光纤制造用自动定长高效切割装置,包括光纤外壳1,光纤外壳1的内部固定连接有定长机构2,定长机构2的右侧固定连接有充能机构3,充能机构3的底部固定连接有切割机构4,光纤外壳1的内部活动连接有除污机构5。
当使用装置时,此时光纤线带动光纤转轮21进行转动,光纤转轮21的转动带动半齿轮22进行转动,半齿轮22的转动由于啮合作用带动主动齿条23向右进行运动,主动齿条23的运动带动棘齿啮合轮24在啮合齿条25的表面进行转动,且由于固定拨动轮26的限位作用使得棘齿啮合轮24不能进行回转,此时主动齿条23一直向右进行运动,当运动至与最右端的挤压拨头27触碰时,此时固定拨动轮26被挤压拨头27顶起无法与棘齿啮合轮24进行啮合,此时在复位簧的作用下进行复位,当固定拨动轮26触碰到最左端的挤压拨头27时,此时棘齿啮合轮24重新与固定拨动轮26进行啮合工作,从而达到自动往复进行切割的触发功能。
同时主动齿条23在向右运动时,带动压能块31向右进行运动,压能块31的向右运动通过充能簧32进行推动使能滑块35向右运动,使能滑块35的向右运动由于阻挡板34的阻挡作用使得充能簧32进行不断的压缩,当压能块31向右运动触碰到梯形滑块33后,此时带动梯形滑块33向上运动,梯形滑块33的向上运动通过连接杆带动阻挡板34向上运动,阻挡板34上升到一定位置后无法阻挡使能滑块35,此时在充能簧32的弹性势能作用下使能滑块35瞬间向右弹出,从而达到自动对装置进行充能的功能。
且使能滑块35的向右运动带动拉动块41向右进行运动,拉动块41的向右运动带动切割摆杆42顺着光纤外壳1内部的滑槽向上进行运动,切割摆杆42的向上运动带动压动杠杆43进行逆时针转动,压动杠杆43的逆时针转动带动切割头44向下运动,此时切割头44与其对称端将光纤进行切断,从而达到自动定长切割的功能。
进一步的,定长机构2包括光纤转轮21,光纤转轮21表面固定连接有半齿轮22,半齿轮22的顶部啮合有主动齿条23,主动齿条23的表面转动连接有棘齿啮合轮24,棘齿啮合轮24的顶部啮合有啮合齿条25,主动齿条23的表面活动连接有固定拨动轮26,光纤外壳1的内部固定连接杆有挤压拨头27,棘齿啮合轮24的内部活动连接有棘齿,棘齿的表面固定连接有棘齿簧,棘齿簧远离棘齿的一端与棘齿啮合轮24的内部固定连接,主动齿条23的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接,主动齿条23的左端固定连接有复位簧,复位簧远离主动齿条23的一端与光纤外壳1的内部固定连接,光纤外壳1的内壁固定连接有啮合齿条25。
进一步的,充能机构3包括压能块31,压能块31的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接,压能块31的右端固定连接有充能簧32,充能簧32远离压能块31的一端固定连接有使能滑块35,使能滑块35的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接,压能块31的右侧活动连接有梯形滑块33,梯形滑块33的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接,梯形滑块33的表面通过固定杆固定连接有阻挡板34,阻挡板34的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接,阻挡板34的顶部固定连接有阻挡簧,阻挡簧远离阻挡板34的一端与光纤外壳1的内部固定连接。
进一步的,切割机构4包括拉动块41,拉动块41的左端活动连接有切割摆杆42,切割摆杆42的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接,切割摆杆42远离拉动块41的一端活动连接有压动杠杆43,压动杠杆43的表面与光纤外壳1的内部转动连接,压动杠杆43远离切割摆杆42的一端通过表面滑槽活动连接有切割头44。
实施例二:
请参阅图5,一种利用转动力的光纤制造用自动定长高效切割装置,包括光纤外壳1,光纤外壳1的内部固定连接有定长机构2,定长机构2的右侧固定连接有充能机构3,充能机构3的底部固定连接有切割机构4,光纤外壳1的内部活动连接有除污机构5。
当光纤转轮21进行转动时,带动去污甩块51进行离心运动,去污甩块51的离心运动带动去污轴套52向内进行运动,去污轴套52的向内运动带动轴套推力杆53进行摆动,轴套推力杆53的摆动带动去污滑块54向左进行运动,去污滑块54的向左运动带动斜摆杆55进行斜向下的摆动,此时带动擦拭块56向下运动与其对称端接触光纤的表面,在光纤运动的过程中有效的对其表面进行擦拭,从而达到自动清洁光纤表面污渍的功能。
进一步的,除污机构5包括去污甩块51,去污甩块51的顶部固定连接有甩动簧,去污甩块51的表面活动连接有去污轴套52,去污轴套52的左侧面活动连接有轴套推力杆53,轴套推力杆53远离去污轴套52的一端活动连接有去污滑块54,去污滑块54的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接,去污滑块54表面活动连接有斜摆杆55,斜摆杆55远离去污滑块54的一端活动连接有擦拭块56,擦拭块56的表面通过光纤外壳1内部开设的滑槽与光纤外壳1的内部活动连接。
进一步的,主动齿条23的右侧固定连接有压能块31,使能滑块35的底部固定连接有拉动块41,去污甩块51的表面通过光纤转轮21内部开设的滑槽与光纤转轮21的内部活动连接,甩动簧远离去污甩块51的一端与光纤转轮21的内部固定连接,去污轴套52的表面固定连接有轴心簧,轴心簧远离去污轴套52的一端与光纤外壳1的内部固定连接。
工作原理:当使用装置时,此时光纤线带动光纤转轮21进行转动,光纤转轮21的转动带动半齿轮22进行转动,半齿轮22的转动由于啮合作用带动主动齿条23向右进行运动,主动齿条23的运动带动棘齿啮合轮24在啮合齿条25的表面进行转动,且由于固定拨动轮26的限位作用使得棘齿啮合轮24不能进行回转,此时主动齿条23一直向右进行运动,当运动至与最右端的挤压拨头27触碰时,此时固定拨动轮26被挤压拨头27顶起无法与棘齿啮合轮24进行啮合,此时在复位簧的作用下进行复位,当固定拨动轮26触碰到最左端的挤压拨头27时,此时棘齿啮合轮24重新与固定拨动轮26进行啮合工作,从而达到自动往复进行切割的触发功能。
同时主动齿条23在向右运动时,带动压能块31向右进行运动,压能块31的向右运动通过充能簧32进行推动使能滑块35向右运动,使能滑块35的向右运动由于阻挡板34的阻挡作用使得充能簧32进行不断的压缩,当压能块31向右运动触碰到梯形滑块33后,此时带动梯形滑块33向上运动,梯形滑块33的向上运动通过连接杆带动阻挡板34向上运动,阻挡板34上升到一定位置后无法阻挡使能滑块35,此时在充能簧32的弹性势能作用下使能滑块35瞬间向右弹出,从而达到自动对装置进行充能的功能。
且使能滑块35的向右运动带动拉动块41向右进行运动,拉动块41的向右运动带动切割摆杆42顺着光纤外壳1内部的滑槽向上进行运动,切割摆杆42的向上运动带动压动杠杆43进行逆时针转动,压动杠杆43的逆时针转动带动切割头44向下运动,此时切割头44与其对称端将光纤进行切断,从而达到自动定长切割的功能。
同时当光纤转轮21进行转动时,带动去污甩块51进行离心运动,去污甩块51的离心运动带动去污轴套52向内进行运动,去污轴套52的向内运动带动轴套推力杆53进行摆动,轴套推力杆53的摆动带动去污滑块54向左进行运动,去污滑块54的向左运动带动斜摆杆55进行斜向下的摆动,此时带动擦拭块56向下运动与其对称端接触光纤的表面,在光纤运动的过程中有效的对其表面进行擦拭,从而达到自动清洁光纤表面污渍的功能。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种利用转动力的光纤制造用自动定长高效切割装置
- 一种彩钢瓦制造定长自动化切割装置及切割工艺