一种滚珠里程计及里程计算方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及移动机器人导航定位技术领域,具体涉及一种滚珠里程计及里程计算方法。
背景技术
传统的计算滚轴滚动的距离来计算里程的方法只能够得到一个轴向的里程,为了使得机器人的移动里程计算更准确,新的移动机器人一般采用光流传感器计算机器人的移动里程。光流传感器通过计算光学镜头看到的图像的移动来计算里程,此方案可以获得平面中x、y两个轴向的里程,使用效果良好,但是在高反光度或透明平面上会失效,无法使用在擦窗机器人等在特殊环境中运作的移动机器人上。
发明内容
针对上述提到的现有技术中的里程计无法在高反光度或透明的平面上使用的问题,本发明提供一种滚珠里程计及使用该滚珠里程计的里程计算方法,在里程计中设置滚珠,然后利用位移传感器监测滚珠的滚动里程,间接得到机器人在接触平面上的位移和方向,不仅能够用于计算移动机器人的移动里程,还能够用于获取移动机器人在接触平面上的移动轨迹。
本发明解决其技术问题采用的技术方案是:一种滚珠里程计,设有滚珠、滚珠支架、位移传感器和底部支撑板,所述滚珠支架设置在所述底部支撑板上,所述滚珠可滚动的设置在所述滚珠支架中,所述滚珠的一侧穿过所述滚珠支架与接触平面抵接,所述位移传感器设置在所述滚珠支架上检测所述滚珠的滚动。
本发明解决其技术问题采用的技术方案进一步还包括:
如上所述的一种滚珠里程计,所述滚珠支架包括支撑轴、轴承和底板,所述支撑轴设有三条以上且环绕所述滚珠设置,所述轴承的数量两倍于所述支撑轴的数量,所述轴承分别设置在支撑轴的端部并与所述底板连接,所述支撑轴所在的多边形内切圆直径小于所述滚珠的直径,所述支撑轴与所述滚珠的外表面抵接,使得所述支撑轴随着所述滚珠的滚动而转动。
如上所述的一种滚珠里程计,所述位移传感器为光流传感器,所述光流传感器设置在所述滚珠的一侧,所述光流传感器的摄像头朝向所述滚珠设置。
如上所述的一种滚珠里程计,所述滚珠支架设有滚珠盖板,所述滚珠设置在所述支撑轴和滚珠盖板之间,所述滚珠盖板上设有半径小于滚珠的滚珠圆孔,所述滚珠可转动的安装在所述滚珠圆孔中。
如上所述的一种滚珠里程计,所述位移传感器为编码器,所述编码器设有两个以上,所述编码器分别设置在两条以上相邻的支撑轴上,所述编码器的码盘与所述支撑轴连接并随所述支撑轴转动,所述编码器与计数器连接。
如上所述的一种滚珠里程计,所述编码器为光电编码器或磁性编码器。
如上所述的一种滚珠里程计,所述底部支撑板和滚珠支架通过连接柱连接,所述连接柱设有两条以上且相互平行设置,所述连接柱的一端与所述底部支撑板固定连接,所述连接柱的另一端与所述滚珠支架活动连接,使得所述滚珠支架能够沿着所述连接柱往复运动;所述连接柱上套装有复位弹簧,所述复位弹簧的一端与所述底部支撑板抵接,所述复位弹簧的另一端与所述滚珠支架抵接。
如上所述的一种滚珠里程计,所述滚珠支架包括支撑轴、轴承、底板和滚珠盖板,所述滚珠盖板设置在所述滚珠的前侧,所述滚珠盖板上设有半径小于滚珠的滚珠圆孔,所述滚珠可转动的嵌装在所述滚珠圆孔中且透过所述滚珠圆孔与接触平面接触,所述支撑轴设置在所述滚珠的后侧,所述支撑轴设有三条且呈三角形环绕所述滚珠设置,所述轴承设有六个,所述轴承分别设置在所述支撑轴两端且与所述底板连接,所述支撑轴组成的三角形的内切圆直径小于所述滚珠的直径,所述支撑轴与所述滚珠的外表面抵接,使得所述滚珠被限制在所述滚珠圆孔中;所述底部支撑板和滚珠盖板通过四条平行设置的连接柱连接,所述底板上设有供所述连接柱穿过的通孔,所述连接柱上设有复位弹簧,所述复位弹簧的一端与所述底部支撑板抵接,所述复位弹簧的另一端与所述滚珠支架抵接。
如上所述的一种滚珠里程计,所述位移传感器为光流传感器,所述光流传感器设置在所述滚珠后侧的底板上,所述光流传感器的摄像头朝向所述滚珠,所述光流传感器和滚珠之间设有透镜。
一种如上任一所述的滚珠里程计计算里程的方法,其特征在于,包括以下步骤:
S10,以其中两条相邻且设有编码器的支撑轴轴a和轴b的交点为原点建立平面直角坐标系,轴a转动方向与x轴之间的夹角为α,轴b转动方向与x轴之间的夹角为β;
S20,滚珠里程计移动,滚珠滚动并带动轴a和轴b转动,位移传感器获取获取滚珠里程计单位时间内轴a的位移L1和轴b的位移L2;
S30,计算单位时间内滚珠里程计的终点坐标(x,y),x=L1*cos(α)=L2*cos(β),y=L2*sin(α)=L2*sin(β);
S40、计算终点与原点之间的距离L,
S50,将滚珠里程计从初始起点移动到最终目的点经过了n个单位时间,计算出n个单位对应的L1、L2……Ln,将L1至Ln相加,就得到滚珠里程计的总行进里程。
本发明的有益效果是:本发明的滚珠里程计结构简单,生产方便,将滚珠和常用的位移感应器结合起来,通过检测滚珠的滚动动作,得到滚珠的滚动数据,经过简单的计算就能够得到移动机器人在高反光或透明光滑平面上的精确里程甚至详细的行走轨迹,而且受使用环境的影响极小,使用寿命也十分长;对应的里程计算方法简单易用误差小,不仅能够得到准确的里程数据,也十分便于移动机器人行走路径的测算,方便后期路径规划和控制。
下面将结合附图和具体实施方式对本发明做进一步说明。
附图说明
图1为本发明的滚珠里程计实施例一的垂直剖面结构示意图;
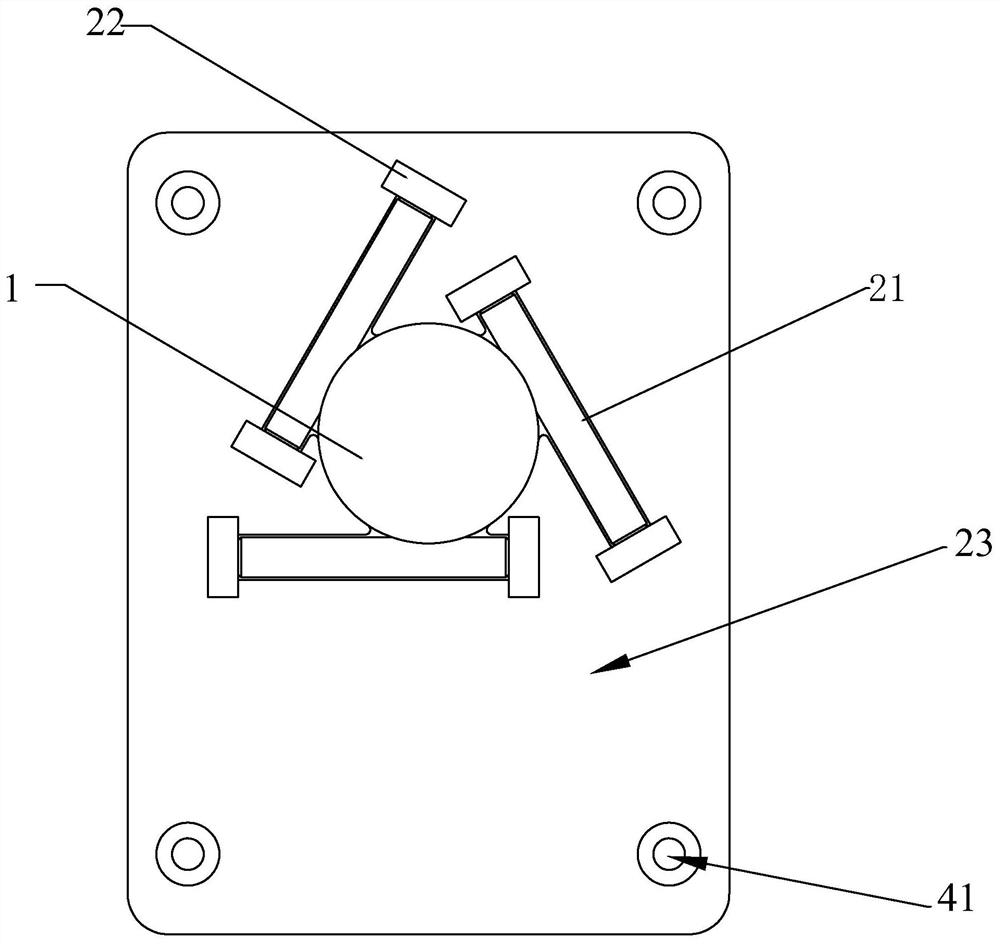
图2为本发明的滚珠里程计实施例一的水平剖面结构示意图;
图3为本发明的滚珠里程计实施例二的水平剖面结构示意图;
图4为本发明的滚珠里程计实施例三的水平剖面结构示意图;
图中,1、滚珠,21、支撑轴,22、轴承,23、底板,24、滚珠盖板,241、滚珠圆孔,31、光流传感器,311、透镜,321、光栅码盘、322、光电检测装置,331、霍尔磁盘,332、霍尔感应装置,4、底部支撑板,41、连接柱,42、复位弹簧。
具体实施方式
本实施例为本发明优选实施方式,其他凡其原理和基本结构与本实施例相同或近似的,均在本发明保护范围之内。
需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
本发明的滚珠里程计实施例一参照图1和2所示,设有滚珠1、滚珠支架、位移传感器和底部支撑板4,滚珠支架设置在底部支撑板4上,滚珠1可滚动的设置在滚珠支架中,滚珠1的一侧穿过滚珠支架与接触平面抵接,位移传感器设置在滚珠支架上检测滚珠1的滚动。
本实施例中,滚珠支架用于固定滚珠1,滚珠支架包括支撑轴21、轴承22、底板23和滚珠盖板24,滚珠1设置在支撑轴21和滚珠盖板24之间。滚珠盖板24设置在滚珠1的前侧,滚珠盖板24上设有半径小于滚珠1的滚珠圆孔241,滚珠1可转动的嵌装在滚珠圆孔241中且透过滚珠圆孔241与接触平面接触。支撑轴21设置在滚珠1的后侧,支撑轴21设有三条且呈三角形环绕滚珠1设置,支撑轴21组成的三角形的内切圆直径小于滚珠1的直径,使得支撑轴21与滚珠1的外表面抵接,滚珠1能够带动支撑轴21,支撑轴21又能够将滚珠1限制在滚珠圆孔241中;轴承22设有六个,轴承22分别设置在支撑轴21两端且与底板23连接,使支撑轴21被安装到底板23上,而且在滚珠1滚动时支撑轴21能够随着滚珠21顺滑的滚动。底部支撑板4设置在滚珠支架的后方,底部支撑板4和滚珠盖板24通过四条平行设置的连接柱41连接,底板23上设有供连接柱41穿过的通孔,连接柱41上设有复位弹簧42,复位弹簧42的一端与底部支撑板4抵接,复位弹簧42的另一端与滚珠支架抵接,使得滚珠支架被压向接触平面,设置在滚珠支架中的滚珠1与接触平面保持接触。
本实施例中,位移传感器为光流传感器31,光流传感器31设置在滚珠1后侧的底板23上,光流传感器31的摄像头朝向滚珠1,由于滚珠1和滚珠盖板24的遮挡,光线不会直接照射入光流传感器的摄像头中,使得光流传感器31失效。为了使得光流传感器31对滚珠1的滚动动作的监测更加精确,光流传感器31和滚珠1之间设有透镜311,能够放大滚珠1的表面。移动机器人移动时,光流传感器31通过对滚珠1表面图像的分析,能够建立平面直角坐标系,计算滚珠1移动的在x方向和y方向上的位移,进而计算出移动机器人的移动里程,通过对单位时间的移动里程和方向的分析还能够得到精确的行走路线。
本发明的滚珠里程计实施例二参照图3所示,设有滚珠1、滚珠支架、位移传感器和底部支撑板4,滚珠支架设置在底部支撑板4上,滚珠1可滚动的设置在滚珠支架中,滚珠1的一侧穿过滚珠支架与接触平面抵接,位移传感器设置在滚珠支架上检测滚珠1的滚动。滚珠支架包括支撑轴21、轴承22和底板23,支撑轴21设有三条且呈三角形环绕滚珠1设置,支撑轴21组成的三角形的内切圆直径小于滚珠1的直径,使得支撑轴21与滚珠1的外表面抵接,滚珠1能够带动支撑轴21,支撑轴21又能够将滚珠1限制在滚珠圆孔241中;轴承22设有六个,轴承22分别设置在支撑轴21两端且与底板23连接,使支撑轴21被安装到底板23上,而且在滚珠1滚动时支撑轴21能够随着滚珠21顺滑的滚动。
本实施例中的位移传感器为光电编码器,光电编码器设有两个,光电编码器设置在其中两条相邻的支撑轴21的一端,光电编码器设有光栅码盘321和光电检测装置322。两个光栅码盘321分别与对应的支撑轴21连接并随着支撑轴21转动,光电编码器的光电检测装置322监测光栅码盘321的转动并向与编码器连接的计数器发出脉冲信号,计数器根据接收到的脉冲信号计算移动机器人在对应支撑轴21转动方向上的位移,计算出终点位置在以两条支撑轴21的交点为原点建立的平面直角坐标系中的坐标,进而计算出移动机器人的移动里程和轨迹。
本发明的滚珠里程计实施例三参照图4所示,设有滚珠1、滚珠支架、位移传感器和底部支撑板4,滚珠支架设置在底部支撑板4上,滚珠1可滚动的设置在滚珠支架中,滚珠1的一侧穿过滚珠支架与接触平面抵接,位移传感器设置在滚珠支架上检测滚珠1的滚动。滚珠支架包括支撑轴21、轴承22和底板23,支撑轴21设有三条且呈三角形环绕滚珠1设置,支撑轴21组成的三角形的内切圆直径小于滚珠1的直径,使得支撑轴21与滚珠1的外表面抵接,滚珠1能够带动支撑轴21,支撑轴21又能够将滚珠1限制在滚珠圆孔241中;轴承22设有六个,轴承22分别设置在支撑轴21两端且与底板23连接,使支撑轴21被安装到底板23上,而且在滚珠1滚动时支撑轴21能够随着滚珠21顺滑的滚动。
本实施例中的位移传感器为磁性编码器,磁性编码器包括霍尔磁盘331和霍尔感应器332,磁性编码器分别设置在其中两条相邻的支撑轴21的一端,霍尔磁盘331分别与对应的支撑轴21连接并随着支撑轴21转动,霍尔感应装置332监测霍尔磁盘331的转动并向与编码器连接的计数器发出脉冲信号,计数器根据接收到的脉冲信号计算移动机器人在对应支撑轴21转动方向上的位移,计算出终点位置在以两条支撑轴21的交点为原点建立的平面直角坐标系中的坐标,进而计算出移动机器人的移动里程和轨迹。
在实际生产过程中,支撑轴21的数量还可以根据需要增加,设置为相互垂直的四条,编码器设置在相邻的两条支撑轴21,则可以直接以两条支撑轴21所在的直线为x轴和y轴建立平面直角坐标系,两条支撑轴21在单位时间内的转动位移为终点的坐标,利用两点之间的距离公式就可以计算出移动机器人单位时间内的里程。
本发明还提供一种利用实施例二或三的滚珠里程计计算里程的方法,包括以下步骤:
S10,以其中两条相邻且设有编码器的支撑轴轴a和轴b的交点为原点建立平面直角坐标系,轴a转动方向与x轴之间的夹角为α,轴b转动方向与x轴之间的夹角为β;
S20,滚珠里程计移动,滚珠滚动并带动轴a和轴b转动,位移传感器获取获取滚珠里程计单位时间内轴a的位移La和轴b的位移Lb;
S30,计算单位时间内滚珠里程计的终点坐标(x,y),x=La*cos(α)=Lb*cos(β),y=La*sin(α)=Lb*sin(β);
S40、计算终点与原点之间的距离L,
S50,将滚珠里程计从初始起点移动到最终目的点经过了n个单位时间,计算出n个单位对应的L1、L2……Ln,将L1至Ln相加,就得到滚珠里程计的总行进里程。
本发明的滚珠里程计结构简单,生产方便,将滚珠和常用的位移感应器结合起来,通过检测滚珠的滚动动作,得到滚珠的滚动数据,经过简单的计算就能够得到移动机器人在高反光或透明光滑平面上的精确里程甚至详细的行走轨迹,而且受使用环境的影响极小,使用寿命也十分长;对应的里程计算方法简单易用误差小,不仅能够得到准确的里程数据,也十分便于移动机器人行走路径的测算,方便后期路径规划和控制。
- 一种滚珠里程计及里程计算方法
- 一种行人导航的二维人体里程计及里程计算方法