一种大螺距螺旋CT的重建方法、装置、设备和介质
文献发布时间:2023-06-19 12:19:35
技术领域
本发明属于图像重建技术领域,具体涉及一种大螺距螺旋CT的重建方法、装置、设备和介质。
背景技术
X射线计算机断层扫描(CT,Computed Tomography)设备,被广泛应用于医疗和工业上来诊断疾病和无损检测。其原理是通过在不同角度扫描物体来获得多组投影数据,再通过重建算法获得扫描物体的断层图像。
现有技术中,螺旋扫描系统是常用的CT扫描系统,其优点在于可以通过不间断的连续扫描快速获得所需要的投影数据。使用时,通常需要提高检测速度以在短时间内完成物体扫描;此时为了采集到重建算法需要的完备投影数据,通常需要通过增加探测器的排数或者提高转速来实现。然而,增加探测器的排数的方法会大幅度增加系统成本,且由于锥角扩大会带来锥形束伪影;而提高转速的方法因受限于机械的稳定性和转速极限,往往使用效果不佳。
因此,最有效的方法是通过增加螺距来提高扫描速度,但由于螺距的增加,会造成重建算法所需的投影数据缺失,因此需要对缺失的投影数据进行补全再重建。而目前常用的螺旋重建算法,例如Katsevich类型算法、BPF类型算法以及FBP类型算法等都对螺距因子有限制(通常要求螺距因子不大于1.5),当螺距增大时,会造成投影数据的缺失,进而导致重建的图像存在伪影,图像质量不佳。
发明内容
本发明的目的是提供一种大螺距螺旋CT的重建方法、装置、设备和介质,用以解决现有技术中存在的至少一个问题。
为了实现上述目的,本发明采用以下技术方案:
第一方面,本发明提供一种大螺距螺旋CT的重建方法,包括:
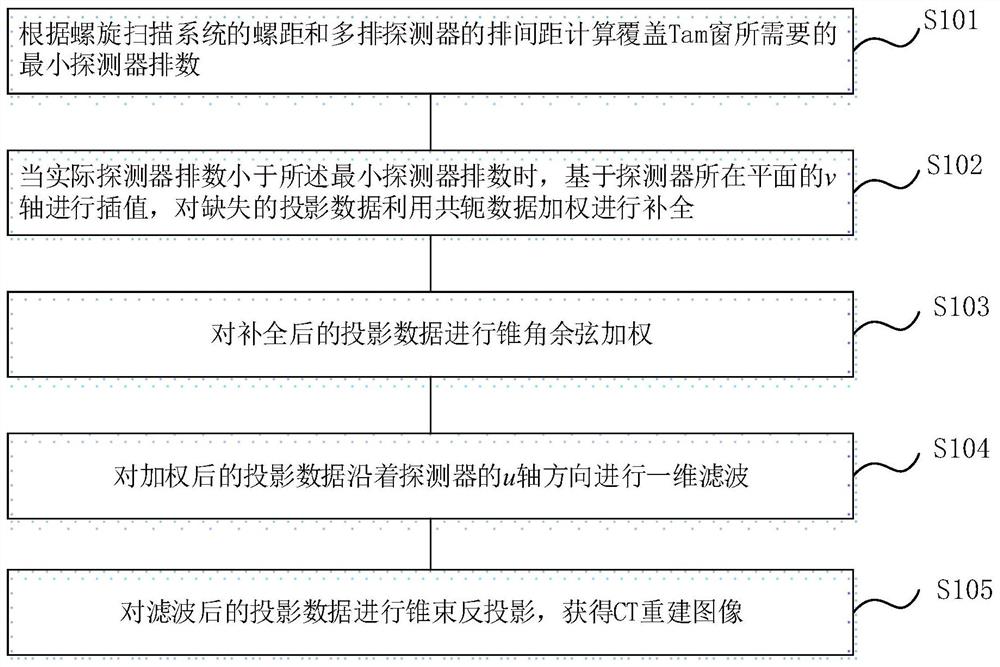
根据螺旋扫描系统的螺距和多排探测器的排间距计算覆盖Tam窗所需要的最小探测器排数;
当实际探测器排数小于所述最小探测器排数时,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全;
对补全后的投影数据进行锥角余弦加权;
对加权后的投影数据沿着探测器的u轴方向进行一维滤波;
对滤波后的投影数据进行锥束反投影,获得CT重建图像。
在一种可能的设计中,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全,包括:
当v>v
其中,g为投影数据,(u,v)为螺旋探测器平面的坐标,λ为X射线源扫描轨迹的角度参数,n为控制插值所用的共轭投影数据的排数且1≤n≤nv,nv为探测器的总排数,ω
g(-u,v
其中,ω
其中,H为螺距,R为X射线源到旋转中心的距离,D为X射线源到螺旋探测器的距离;
当v<v
其中,ω
在一种可能的设计中,当n=1时,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全,包括:
当v>v
g(u,v,λ)=(1-ω
其中,ω
当v<v
g(u,v,λ)=(1-ω
此时,
在一种可能的设计中,所述一维滤波采用R-L卷积核。
第二方面,本发明提供一种大螺距螺旋CT的重建装置,包括:
计算模块,用于根据螺旋扫描系统的螺距和多排探测器的排间距计算覆盖Tam窗所需要的最小探测器排数;
数据补全模块,用于当实际探测器排数小于所述最小探测器排数时,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全;
加权模块,用于对补全后的投影数据进行锥角余弦加权;
滤波模块,用于对加权后的投影数据沿着探测器的u轴方向进行一维滤波;
反投影模块,用于对滤波后的投影数据进行锥束反投影,获得CT重建图像。
在一种可能的设计中,当基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全时,所述数据补全模块具体用于:
当v>v
其中,g为投影数据,(u,v)为螺旋探测器平面的坐标,λ为X射线源扫描轨迹的角度参数,n为控制插值所用的共轭投影数据的排数且1≤n≤nv,nv为探测器的总排数,ω
其中,ω
当v<v
其中,ω
在一种可能的设计中,当n=1,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全时,所述数据补全模块具体用于:
当v>v
g(u,v,λ)=(1-ω
其中,ω
当v<v
g(u,v,λ)=(1-ω
此时,
在一种可能的设计中,所述一维滤波采用R-L卷积核。
第三方面,本发明提供一种计算机设备,包括:依次通信相连的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面所述的大螺距螺旋CT的重建方法。
第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如第一方面所述的大螺距螺旋CT的重建方法。
第五方面,本发明提供一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面所述的大螺距螺旋CT的重建方法。
有益效果:
1.本发明通过在螺旋探测器所在平面的v轴上进行插值,由于v轴上的距离是物理探测器的实际距离,因此,基于v轴进行插值所计算到的权值能够更加接近实际的权重,减小了插值误差,进而提高了重建的CT图像的图像质量。
2.本发明充分考虑到不同共轭投影数据的锥角效应,将控制插值所用的共轭投影数据的排数n引入到插值算法中,则可以根据n的取值不同对v轴前后多组共轭投影数据进行加权补齐缺失的投影数据,从而可以克服锥角效应对插值算法计算结果的准确性的影响,提高了计算的准确率。
3.本发明对缺失的投影数据进行补全后,能够拓展适用于螺距因子大于2的情形下的图像重建,适用范围更广。
附图说明
图1为现有的扫描系统的示意图;
图2为本发明中共轭投影数据的二维示意图;
图3为本发明中大螺距螺旋CT的重建方法的流程图;
图4为本发明在v轴上插值以补全对缺失的投影数据的加权示意图;
图5为本发明中大螺距螺旋CT的重建装置的结构示意图。
具体实施方式
为使本说明书实施例的目的、技术方案和优点更加清楚,下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本说明书一部分实施例,而不是全部的实施例。基于本说明书中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
为了解决现有的螺旋CT扫描系统在进行图像重建时存在投影数据缺失,导致重建的图像质量不高的技术问题,第一方面,本实施例提供一种大螺距螺旋CT的重建方法,通过对缺失的投影数据进行补全,能够获得清晰完整的重建图像。其中,该方法可应用于服务器,包括但不限于通过python、java、C++等语言和工具执行步骤S101-步骤S105实现。
请结合参见图1-4,下面对本实施例中的大螺距螺旋CT的重建方法进行详细说明。
其中,图1示出了现有技术中典型的CT扫描系统的示意图,其中,X射线源和探测器围绕旋转中线转动,旋转中线为与z轴平行且通过旋转中心o的虚拟直线。s(λ)表示X射线源的扫描轨迹,λ为射线源的旋转角度,(u,v,w)为探测器和射线源所在的旋转坐标,(u,v)表示探测器平面上点的坐标,R为射线源到旋转中心的距离,o
其中,射线源的扫描轨迹由
其中
若投影数据没有截断,则螺旋扫描系统的CT图像重建问题就是利用投影数据来重建扫描物体内部断层结构f(x,y,z),其重建算法有多种,优选的采用典型的Feldkamp(FDK)类型重建算法,其数学表达式为:
其中,
在上述公开内容的基础上,如图2-4所示,本实施例中的大螺距螺旋CT的重建方法具体包括:
步骤S101.根据螺旋扫描系统的螺距和多排探测器的排间距计算覆盖Tam窗所需要的最小探测器排数;
其中,需要说明的是,在螺旋CT重建过程中,精确重建所需要的投影数据为Tam-Danielsson窗(简称Tam窗)所覆盖的投影数据,其中,Tam窗为相邻的两条螺旋扫描轨迹在探测器上的投影。因此,在螺距给定的情况下,精确重建所需要的最少探测器排数nv
其中,dv为探测器像素单元在排数方向(v方向)上的大小,即排间距,D为射线源到探测器的距离,γ
其中,u
基于上述公式(c)和(d),可以计算出螺旋CT系统在精确重建时所需要的最少探测器排数nv
步骤S102.当实际探测器排数小于所述最小探测器排数时,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全;
其中,当实际探测器排数小于所述最小探测器排数时,说明投影数据不完备,无法满足螺旋扫描系统重建算法的数据要求,因此,需要先对缺失的投影数据进行补全之后再重建。
其中,需要说明的是,在二维扇束CT中,共轭投影数据定义如图2所示,投影数据g(u,v,λ)的共轭投影数据为g(-u,v,λ±π+2γ),其中
则在一种可能的设计中,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全,包括:
当v>v
其中,g为投影数据,(u,v)为螺旋探测器平面的坐标,λ为X射线源扫描轨迹的角度参数,n为控制插值所用的共轭投影数据的排数且1≤n≤nv,nv为探测器的总排数,ω
其中,ω
其中,H为螺距,R为X射线源到旋转中心的距离,D为X射线源到螺旋探测器的距离;
当v<Pmin时,
其中,ω
在一种可能的设计中,如图4所示,当n=1时,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全,包括:
当v>v
g(u,v,λ)=(1-ω
其中,ω
当v<v
g(u,v,λ)=(1-ω
此时,
步骤S103.对补全后的投影数据进行锥角余弦加权;
步骤S104.对加权后的投影数据沿着探测器的u轴方向进行一维滤波;
其中,优选的,所述一维滤波采用R-L卷积核;
步骤S105.对滤波后的投影数据进行锥束反投影,获得CT重建图像。
基于上述公开的内容,本实施例通过在螺旋探测器所在平面的v轴上进行插值,由于v轴上的距离是物理探测器的实际距离,因此,基于v轴进行插值所计算到的权值能够更加接近实际的权重,减小了插值误差,进而提高了重建的CT图像的图像质量。此外,本实施例充分考虑到不同共轭投影数据的锥角效应,将控制插值所用的共轭投影数据的排数n引入到插值算法中,则可以根据n的取值不同对v轴前后多组共轭投影数据进行加权补齐缺失的投影数据,从而可以克服锥角效应对插值算法计算结果的准确性的影响,提高了计算的准确率。因此,对缺失的投影数据进行补全后,能够拓展适用于螺距因子大于2的情形下的图像重建,适用范围更广。
如图5所示,第二方面,本发明提供一种大螺距螺旋CT的重建装置,包括:
计算模块,用于根据螺旋扫描系统的螺距和多排探测器的排间距计算覆盖Tam窗所需要的最小探测器排数;
数据补全模块,用于当实际探测器排数小于所述最小探测器排数时,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全;
加权模块,用于对补全后的投影数据进行锥角余弦加权;
滤波模块,用于对加权后的投影数据沿着探测器的u轴方向进行一维滤波;
反投影模块,用于对滤波后的投影数据进行锥束反投影,获得CT重建图像。
在一种可能的设计中,当基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全时,所述数据补全模块具体用于:
当v>v
其中,g为投影数据,(u,v)为螺旋探测器平面的坐标,入为X射线源扫描轨迹的角度参数,n为控制插值所用的共轭投影数据的排数且1≤n≤nv,nv为探测器的总排数,ω
其中,ω
当v<v
其中,ω
在一种可能的设计中,当n=1,基于探测器所在平面的v轴进行插值,对缺失的投影数据利用共轭数据加权进行补全时,所述数据补全模块具体用于:
当v>v
g(u,v,λ)=(1-ω
其中,ω
其中,AB为投影数据在v轴上的B点坐标到A点坐标v
当v<v
g(u,v,λ)=(1-ω
此时,
在一种可能的设计中,所述一维滤波采用R-L卷积核。
第三方面,本发明提供一种计算机设备,包括:依次通信相连的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面所述的大螺距螺旋CT的重建方法。
第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如第一方面所述的大螺距螺旋CT的重建方法。
第五方面,本发明提供一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面所述的大螺距螺旋CT的重建方法。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种大螺距螺旋CT的重建方法、装置、设备和介质
- 图像重建方法、装置、设备及多层螺旋CT系统