鼓单元、盒和联接件
文献发布时间:2023-06-19 12:19:35
本申请是2016年2月26日提交的、名称为“鼓单元、盒和联接件”的发明专利申请No.201680018880.2的分案申请。
[技术领域]
本发明涉及可与采用电子照相处理的成像设备一起使用的处理盒等。
[背景技术]
在电子照相成像设备中,已知一种结构,其中,诸如感光鼓和显影辊的元件(与成像有关的可旋转部件)集成到盒中,该盒相对于成像设备主组件(以下称为设备主组件)能够可拆卸地安装。在此类结构中,在许多设备中采用了用于从设备主组件接收驱动力以使盒中感光鼓旋转的结构。此时,已知一种结构,其中,驱动力通过盒侧联接件与设备主组件侧驱动力传递部(诸如驱动销)之间的接合而传递。
例如,日本专利特开No.2008-233867公开了一种盒,其具有设置在感光鼓端部处的联接件,该联接件相对于感光鼓的旋转轴线是可倾转的。
[本发明要解决的问题]
本发明的另一个目的是对上述传统技术进行开发。
[问题解决方案]
典型结构如下。
一种鼓单元,能够可拆卸地安装到电子照相成像设备主组件,该电子照相成像设备包括设置有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成能够进入凹部并接收用于旋转感光鼓的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分设置在感光鼓的内部。
[发明效果]
进一步开发了上述传统技术。
[附图说明]
图1是成像设备100的示意性剖视图。
图2是处理盒7的外观的立体图。
图3是沿着与感光鼓1的旋转轴线垂直的平面截取的处理盒7的剖视图。
图4是沿着包括感光鼓1旋转轴线中心(旋转轴线)的平面截取的处理盒的剖视图。
图5是主组件驱动轴的外视图。
图6是沿着包括安装到成像设备主组件中的主组件驱动轴101的旋转轴线中心(旋转轴线)的平面截取的剖视图。
图7是沿着包括旋转中心线(旋转轴线)的平面截取的联接件28和主组件驱动轴101的剖视图。
图8是沿着垂直于旋转轴线的平面截取的联接件28和主组件驱动轴101的剖视图。
图9是沿着包括旋转中心线(旋转轴线)的平面截取的联接件28和主组件驱动轴101的剖视图。
图10是联接件28的立体图。
图11是沿着垂直于联接件28的旋转轴线并穿过基部74的平面截取的联接件28的剖视图。
图12是联接件28的剖视立体图。
图13是沿着包括旋转中心线(旋转轴线)的平面截取的联接件28的剖视图。
图14是沿着垂直于旋转轴线并穿过基部74的平面截取的联接件28和主组件驱动轴101的剖视图。
图15是沿着包括旋转中心线(旋转轴线)的平面截取的联接件28和主组件驱动轴101的剖视图。
图16是示出将盒7安装到成像设备主组件100A的立体图。
图17是示出了盒7到成像设备主组件100A的安装操作的剖视图。
图18是示出了将联接件28安装在主组件驱动轴101上的操作的剖视图。
图19示出了当主组件驱动轴101从主组件驱动传递凹槽101a和接合部73a的相位彼此不对准的状态旋转到相位彼此对准的状态时,将联接件28安装到主组件驱动轴101的操作。
图20是示出联接件28从主组件驱动轴101上移除的操作的剖视图。
图21是根据实施例1的另一形式的联接件28的剖视立体图。
图22是根据实施例2的联接件228的剖视立体图。
图23是根据实施例2的联接件228的立体图。
图24是从Z方向的内侧观察的根据实施例2的联接件228的视图。
图25是示出了实施例2中将联接件228安装到主组件驱动轴101的操作的剖视图。
图26是从Z方向的外侧观察的根据实施例2的联接件228的图示。
图27是表示在金属模具中成型根据实施例2的联接件228的状态的剖视图。
图28是沿着包括旋转轴线的平面截取的联接件328和主组件驱动轴101的剖视图。
图29是示出了沿着包括联接件旋转中心线(旋转轴线)的平面截取,不使用根据实施例4联接件的情况下基部和接合部的变形的剖视图。
图30是从Z方向的外侧观察的根据实施例4的联接件428的视图。
图31是从Z方向的外侧观察的根据实施例4的法兰部件470的视图。
图32是沿着包括旋转中心线(旋转轴线)的平面截取的根据实施例4的联接件428的剖视图。
图33是从Z方向的内侧观察的根据实施例4的法兰部件470的视图。
图34是从Z方向的外侧观察的根据实施例4的支持部件434的图示。
图35是沿着包括旋转中心线(旋转轴线)的平面截取的根据实施例4的联接件428和主组件驱动轴101的剖视图。
图36是示出了根据实施例4将对准部件434组装到法兰部件470的立体图。
图37是沿着垂直于旋转轴线并穿过驱动力接收表面473a的平面截取的主组件驱动轴101和根据实施例4的联接件428的剖视图。
图38是沿着包括旋转中心线(旋转轴线)的平面截取的根据实施例4的另一示例的联接件428和主组件驱动轴101的剖视图。
图39是根据实施例5的联接件528的剖视立体图。
图40是沿着垂直于旋转轴线的平面在穿过驱动传递部573的位置处截取的根据实施例5的联接件528的剖视图。
图41是沿着垂直于旋转轴线的平面并且包括穿过驱动传递部573的位置截取的根据实施例5的联接件528和主组件驱动轴101的剖视图。
图42示出了根据实施例5的用于形成法兰部件570的模具的结构。
图43是根据实施例5的对准部件533的立体图。
图44是从Z方向的外侧观察的根据实施例5的对准部件533的视图。
图45是根据实施例5的联接件528的剖视图。
图46是从Z方向的外侧观察的根据实施例5的法兰部件570的视图。
图47是根据实施例5的组装联接件528的图示。
图48是从Z方向的内侧观察的根据实施例5的对准部件533的图示。
图49是示出了根据实施例5将联接件528安装到主组件驱动轴101的操作的视图。
图50是示出了根据实施例5将联接件528安装到主组件驱动轴101的操作的剖视图。
图51是示出了根据实施例5的从主组件驱动轴101到联接件528的驱动传递的剖视图。
图52是从Z方向的内侧观察的根据实施例5的法兰部件570的视图。
图53是示出了根据实施例5的从主组件驱动轴101到联接件528的驱动传递的剖视图。
图54是示出了实施例5中由于部件公差使得主组件驱动轴101和联接件528的位置彼此偏离时的状态的剖视图。
图55是示出了根据实施例5的联接件528从主组件驱动轴101上移除的操作的剖视图。
图56是示出了根据实施例5的联接件528的基部574的卷绕部574b在直径上大于主组件驱动轴101的轴部101f时的驱动传递的剖视图。
图57是示出了根据实施例5的联接件528的基部574的卷绕部574b在直径上小于主组件驱动轴101的轴部101f时的驱动传递的剖视图。
图58是实施例6中的联接件628的剖视图。
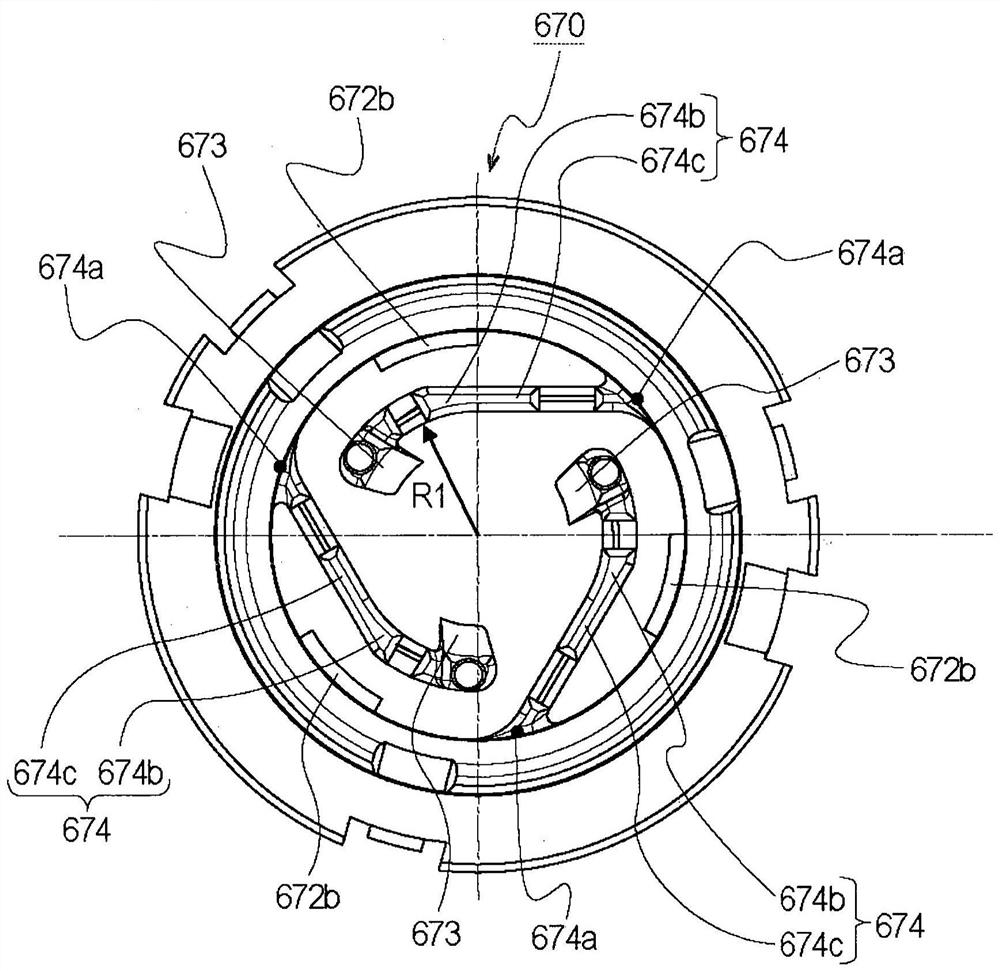
图59是实施例6中的法兰部件670的剖视图。
图60是从Z方向的外侧观察的根据实施例6的法兰部件670的视图。
图61是示出了根据实施例6的清洁单元各部分在Z方向上布置关系的剖视图。
图62是示出了根据实施例6的法兰部件670的模具结构的剖视图。
图63是根据实施例6的对准部件633的立体图。
图64是示出了根据实施例6将联接件628安装到主组件驱动轴101的操作的剖视图。
图65是示出了根据实施例6将联接件628安装到主组件驱动轴101的操作的剖视图。
图66是从Z方向的内侧观察的根据实施例6的法兰部件670的视图。
图67是示出了根据实施例6的从主组件驱动轴到联接件的驱动传递的剖视图。
图68是示出了根据实施例6的将联接件628从主组件驱动轴101上拆卸的操作的剖视图。
图69是示出了在使用大蠕变变形材料制造法兰部件的情况下,在接合部和主组件驱动传递凹槽相位不对准状态下长期存放后,从主组件驱动轴101到联接件3628的驱动传递是不稳定的状态的剖视图。
图70是示出了根据实施例6的用于将金属板635嵌入到法兰部件670中的金属模具结构的剖视图。
图71是从Z方向的外侧观察的根据实施例6的法兰部件670的图示。
图72是根据实施例6的法兰部件670的剖视图。
图73是根据实施例6的法兰部件670的剖视立体图。
图74是根据实施例6的由平直部切除部674g切开的法兰部件670的局部剖视图。
图75是根据实施例6的法兰部件670沿着卷绕部切除部674h截取的局部剖视图。
图76是根据实施例7的联接件728的剖视图。
图77A是根据实施例8的联接件828的剖视图。
图77B是沿着垂直于旋转轴线并且包括驱动力接收表面873a的平面截取的根据实施例8的联接件828和主组件驱动轴101的剖视图。
图78是示出了沿着包括旋转中心线(旋转轴线)的平面截取,不具有根据实施例8的联接件的情况下联接件的基部和接合部的变形的剖视图。
图79是根据实施例8的联接件828的剖视图。
图80是根据实施例9的联接件928的剖视图。
图81是根据实施例9的联接件928的另一示例的剖视图。
图82是根据实施例9的联接件928的另一示例的剖视图。
图83是从Z方向的外侧观察的根据实施例10的联接件1028的图示。
图84是沿着垂直于旋转轴线的平面并且包括穿过驱动力接收表面1073a的位置截取的根据实施例10的联接件1028和主组件驱动轴101的剖视图。
图85是根据实施例10的联接件1028的剖视图。
图86是根据实施例10的联接件1028的变型例的剖视图。
图87A是从Z方向的外侧观察的根据实施例11的联接件1128的图示。
图87B是根据实施例11的联接件1128的剖视立体图。
图88是根据实施例11的联接件1128的剖视图。
图89是根据实施例11的联接件1128的剖视立体图。
图90是根据实施例11的联接件1128的变型例的剖视图。
图91是从Z方向的外侧观察的根据实施例12的法兰部件1270的图示。
图92是根据实施例12的联接件1228的剖视图。
图93是根据实施例12的法兰部件1270的变型例的剖视图。
图94是从Z方向的外侧观察的根据实施例13的法兰部件1370的图示。
图95是沿着垂直于旋转轴线的平面并且包括穿过驱动力接收表面1373a的位置截取的根据实施例13的联接件1328和主组件驱动轴101的剖视图。
图96是根据实施例13的对准部件1333的立体图。
图97是根据实施例13的联接件1328的剖视图。
图98是根据实施例13的法兰部件1370的变型例的剖视图。
图99是根据实施例14的对准部件1633的立体图。
图100是从Z方向的外侧观察的根据实施例14的对准部件1633的视图。
图101是实施例14的法兰部件1670的立体图。
图102是从Z方向的外侧观察的根据实施例14的法兰部件1670的图示。
图103是根据实施例14的法兰部件1670的剖视图。
图104是从Z方向的背侧观察的根据实施例14的法兰部件1670的图示。
图105是根据实施例14的联接件1628的组装过程的图示。
图106是根据实施例14的联接件1628的剖视图。
图107是不使用实施例15的基部的情况下施加到基部的应力的图示。
图108是根据实施例15的法兰部件的基部1774的图示。
图109是根据实施例15的法兰部件的基部1774的变型例的图示。
图110是根据实施例16的法兰部件的基部1874的图示。
图111是根据实施例17的法兰部件的基部1974的图示。
图112是根据实施例19的法兰部件2170和接合部件2173的剖视立体图。
图113是根据实施例19的联接件2128的剖视图。
图114示出了从Z方向的背侧观察的根据实施例19的联接件2128和主组件驱动轴2101的图示。
图115是示出了根据实施例19将联接件2128安装到主组件驱动轴2110的操作的剖视图。
图116示出了从Z方向的背侧观察的根据实施例20的联接件2228和主组件驱动轴2101的图示。
图117是从主组件驱动轴到不使用根据实施例21联接件结构的联接件的驱动传递的图示。
图118是根据实施例21的联接件2328的剖视图。
图119是根据实施例21的联接件2328和主组件驱动轴2410的剖视图。
图120是根据实施例19-实施例21的主组件驱动轴2210的立体图。
图121是根据实施例19-实施例21的盒7的立体图。
图122是根据实施例22的联接件2438的剖视图。
图123是根据实施例22的联接件2428的剖视立体图。
图124是沿着垂直于联接件2428的旋转轴线的平面并且包括基部2474的直线部2474p的位置截取的根据实施例22的联接件2428的剖视图。
图125是沿着垂直于旋转轴线并且包括驱动力接收表面2473a的平面截取的根据实施例22的联接件2428和主组件驱动轴101的剖视图。
图126是根据实施例22的对准部件2433的立体图。
图127是根据实施例22的将联接件2428安装到主组件驱动轴101的操作的说明性剖视图。
图128是将根据实施例22的联接件2428安装在主组件驱动轴101上的操作的说明性剖视图。
图129是从Z方向的内侧观察的根据实施例22的法兰部件2470的图示。
图130是根据实施例22的联接件2438的剖视图。
图131是示出了根据实施例22将对准部件2433组装到法兰部件2470的立体图。
图132是根据实施例23的联接件2528的剖视立体图。
图133是沿着垂直于联接件2528的旋转轴线的平面并且包括基部2574的直线部2574p的位置截取的根据实施例23的联接件2528的剖视图。
图134是根据实施例23的联接件2538的剖视图。
图135是根据实施例24的圆筒形内部部件2640的立体图。
图136是根据实施例24的圆筒形内部部件2640的剖视图。
图137是沿着垂直于联接件2628的旋转轴线并且包括基部2674的直线部2674p的平面截取的根据实施例24的联接件2628的剖视图。
图138是示出了根据实施例24的将圆筒形内部部件2640组装到法兰部件2670的立体图。
图139是根据实施例24的联接件2628的剖视图。
图140是根据实施例24的联接件2628的剖视立体图。
图141是示出了根据实施例24圆筒形内部部件2640相对于法兰部件2670移动的剖视图。
图142是根据实施例25的成像设备4100A的示意性剖视图。
图143是根据实施例25的鼓盒4013的外部立体图。
图144是根据实施例25的鼓盒4013的剖视图。
图145是根据实施例25的显影盒4004的外部立体图。
图146是根据实施例25的显影盒4004的剖视图。
图147是根据实施例25的主组件驱动轴4101的外视图。
图148是根据实施例25沿着安装到成像设备主组件上的主组件驱动轴4101的旋转轴线(旋转轴线)截取的剖视图。
图149是沿着垂直于联接件4028的旋转轴线在穿过基部4074的位置处的平面截取的根据实施例25的联接件4028的剖视图。
图150是从Z方向的外侧观察的根据实施例25的圆筒部件4070的图示。
图151是根据实施例25的对准部件4033的立体图。
图152是用于说明根据实施例25的联接件4028的组装的图示。
图153是根据实施例25的显影盒4004的剖视图。
图154是示出了根据实施例25将显影盒4004安装到成像设备主组件4100A的立体图。
图155是示出根据实施例25将显影盒4004安装到成像设备主组件4100A的操作的剖视图。
图156是示出了根据实施例25将联接件4028安装到主组件驱动轴4101的操作的剖视图。
[具体实施方式]
下文将结合附图描述本实施例的成像设备和处理盒。成像设备使用例如电子照相成像处理在记录材料上形成图像。例如,成像设备包括电子照相复印机、电子照相打印机(例如,LED打印机、激光束打印机等)和电子照相传真机等。此外,盒可安装到成像设备的主组件上并可从其上拆卸。在这些盒中,尤其是把感光体和作用在感光体上的处理器件一体化的一种盒称为处理盒。
此外,包括感光鼓和联接件的一个单元称为鼓单元。
在以下实施例中,在实施例4中以全色成像设备为例,相对于其可安装和拆卸四个处理盒。然而,可以安装到成像设备中的处理盒的数量不限于此。同样,各实施例中公开的组成元件并不意图限制材料、布置、尺寸、其它数值等,除非另有说明。“上方”指当安装成像设备时重力方向上的向上方向,除非另有说明。
<实施例1>
[电子照相成像设备的概述]
首先,将结合图1描述根据本实施例的电子照相成像设备(成像设备)的实施例的整体结构。
图1是根据本实施例的成像设备100的示意性剖视图。
如图1所示,成像设备100包括作为多个成像部的第一成像部SY、第二成像部SM、第三成像部SC和第四成像部SK,以用于形成各颜色的图像,即黄色(Y)、品红色(M)、青色(C)和黑色(K)。在本实施例中,第一至第四成像部SY、SM、SC和SK沿大致水平方向成直线布置。
在该实施例中,除了所形成图像的颜色不同之外,处理盒7(7Y、7M、7C、7K)的结构和操作基本相同。因此,以下将省略Y、M、C和K,并且描述将是普适的,除非另外指明。
在该实施例中,成像设备100具有各自具有感光层的圆筒(以下称为感光鼓)1,这些圆筒沿着相对于竖直方向略微倾斜的方向并排布置,作为多个图像承载部件。扫描单元(曝光装置)3设置在处理盒7的下方。此外,在感光鼓1周围布置了充电辊2等,作为作用在感光层上的处理器件(处理装置、处理部件)。
充电辊2是用于对感光鼓1的表面进行均匀充电的充电器件(充电装置、充电部件)。扫描单元(曝光装置)3是通过基于图像信息用激光对感光鼓1曝光而在感光鼓1上形成静电图像(静电潜像)的曝光器件(曝光装置、曝光部件)。在感光鼓1周围设置有显影装置(以下称为显影单元)4和作为清洁器件(清洁装置、清洁部件)的清洁刮板6。
此外,中间转印带5设置成面对四个感光鼓1,以作为用于将调色剂图像从感光鼓1转印到记录材料(片材、记录介质)12上的中间转印部件。
本实施例的显影单元4使用非磁性单组分显影剂(以下称为调色剂)作为显影剂,并采用接触显影系统,其中,作为显影剂承载部件的显影辊17与感光鼓1接触。
利用上述结构,把形成在感光鼓1上的调色剂图像转印到片材(纸张)12上,并且对转印到片材上的调色剂图像进行定影。作为作用在感光鼓1上的处理器件,处理盒包括用于对感光鼓1进行充电的充电辊2和用于对残留在感光鼓1上的未转印调色剂进行清洁的清洁刮板6。未转印到片材12上但残留在感光鼓1上的未转印残留调色剂由清洁刮板6收集。此外,由清洁刮板6收集的残留调色剂从开口14b容纳到除去显影剂容纳部(以下称为废调色剂容纳部)14a中。废调色剂容纳部14a和清洁刮板6一体化以形成清洁单元(感光体单元、图像承载部件单元)13。
此外,显影单元4和清洁单元13一体化(制成盒)以形成处理盒7。成像设备100的主组件框架上设置有诸如安装引导件和定位部件(未示出)的引导件(定位器件)。处理盒7由上述引导件引导,并且配置成可安装到成像设备主组件(电子照相成像设备主组件)100A上并可从其上拆卸。
黄色(Y)、品红色(M)、青色(C)和黑色(K)各颜色调色剂容纳在用于各颜色的处理盒7中。
中间转印带5接触每个处理盒的感光鼓1,并沿图1中箭头B所示的方向旋转(移动)。中间转印带5卷绕在多个支撑部件(驱动辊51、二次转印对置辊52、从动辊53)上。在中间转印带5的内周面侧,将作为一次转印器件的四个一次转印辊8并置以面对每个感光鼓1。在中间转印带5的外周面侧,作为二次转印器件的二次转印辊9设置在面对二次转印对置辊52的位置。
在成像时,感光鼓1的表面首先由充电辊2进行均匀充电。然后,充电后的感光鼓1的表面由从扫描单元3发射的对应于图像信息的激光束进行扫描和曝光。由此,在感光鼓1上形成对应于图像信息的静电潜像。形成在感光鼓1上的静电潜像由显影单元4显影成调色剂图像。
感光鼓是可旋转部件(图像承载部件),在其表面上承载由显影剂(调色剂)形成的图像(显影剂图像、调色剂图像)的状态下旋转。
通过一次转印辊8的操作把形成在感光鼓1上的调色剂图像转印(一次转印)到中间转印带5上。
例如,在形成全色图像时,在四个处理盒7(7Y、7M、7C、7K)中依次执行上述处理。形成在各处理盒7的感光鼓1上的各颜色调色剂图像依次一次转印,以便在中间转印带5上叠加。之后,与中间转印带5的移动同步,记录材料12进给到二次转印部。中间转印带5上的四色调色剂图像一起转印到传送到由中间转印带5和二次转印辊9构成的二次转印部的记录材料12上。
把已经转印有调色剂图像的记录材料12传送到作为定影器件的定影装置10。通过在定影装置10中对记录材料12加热加压,调色剂图像定影在记录材料12上。此外,一次转印处理后剩余在感光鼓1上的一次转印残留调色剂由清洁刮刀6除去并作为废调色剂收集。此外,二次转印步骤后剩余在中间转印带5上的二次转印残留调色剂由中间转印带清洁装置11除去。
成像设备100也可使用期望的单个或一些(不是全部)成像部形成单色或多色图像。
[处理盒的概述]
参考图2、图3和图4,将描述安装在本实施例的成像设备主组件100A中的处理盒7(盒7)。
容纳黄色调色剂的盒7a、容纳品红色调色剂的盒7b、容纳青色调色剂的盒7c和容纳黑色调色剂的盒7d具有相同的结构。因此,在下面的描述中,每个盒7a、7b、7c和7d将简称为盒7。也将以相同的方式描述各盒构件。
图2是处理盒7的外部立体图。这里,如图2所示,感光鼓1的旋转轴线的方向定义为Z方向(箭头Z1、箭头Z2),图1中的水平方向为X方向(箭头X1、箭头X2),竖直方向是Y方向(箭头Y1、箭头Y2)。
图3是在感光鼓1和显影辊17彼此接触的状态(姿态)中在Z方向上观察的处理盒7的示意性剖视图,该处理盒安装到成像设备100中。
处理盒7包括两个单元,即清洁单元13和显影单元4,清洁单元包括感光鼓1、充电辊2和清洁刮板6作为一个单元,以及显影单元包括诸如显影辊17的显影部件。
显影单元4具有用于支撑显影单元4中各元件的显影框架18。显影单元4包括作为显影剂承载部件的显影辊17,其与感光鼓1接触并可沿箭头D方向(逆时针方向)旋转。通过纵向(旋转轴线方向)两端部处的显影轴承19(19R、19L),显影辊17可旋转地由显影框架18支撑。这里,显影轴承19(19R、19L)分别安装在显影框架18的两侧部。
此外,显影单元4设置有显影剂容纳室(以下称为调色剂容纳室)18a和显影室18b,显影室中设置有显影辊17。
在显影室18b中设置有:作为显影剂供应部件的调色剂供应辊20,其接触显影辊17并沿箭头E方向旋转;以及作为显影剂管制部件的显影刮板21,用于管制显影辊17的调色剂层。显影刮板21通过焊接等固定并集成到固定部件22。
在显影框架18的调色剂容纳室18a中设置有搅拌部件23,用于搅拌所容纳的调色剂并将调色剂输送到调色剂供应辊20。
显影单元4围绕装配轴24(24R、24L)可旋转地联接到清洁单元13,装配轴装配在轴承部件19R和19L中设置的孔19Ra和19La中。此外,在显影单元4中,通过加压弹簧25(25R、25L)把显影辊17朝与感光鼓1接触的方向上推压。因此,在使用处理盒7进行成像时,显影单元4围绕装配轴24沿箭头F的方向转动(旋转),使得感光鼓1和显影辊17彼此接触。
清洁单元13具有清洁框架14,其作为用于支撑清洁单元13中各元件的框架。
图4是沿着包括处理盒7的感光鼓1的旋转中心的虚拟平面截取的剖视图。将联接件28从成像设备主组件接收驱动力的一侧(相对于Z1方向)称为处理盒7的驱动侧(背侧)。与驱动侧相反的一侧(相对于Z2方向)称为处理盒7的非驱动侧(前侧)。
在与联接件28相反的端部(处理盒的非驱动侧端部)上设置有与感光鼓1的内表面接触的电极(电极部),该电极通过与主组件接触而用作电接地。
联接件28安装到感光鼓1的一端部,非驱动侧法兰部件29安装到感光鼓1的另一端部,以构成感光鼓单元30。感光鼓单元30经由联接件28从设置在成像设备主组件100A中的主组件驱动轴101接收驱动力(驱动力从主组件驱动轴101传递)。
联接件28配置成可联接到主组件驱动轴101并可从其分离。
联接件28也是安装到感光鼓1的驱动侧端部上的法兰部件(驱动侧法兰部件)。
如图4所示,联接件28的Z1侧具有圆筒形状(圆筒部71)。圆筒部71朝向Z1侧(轴向外侧)突出超过感光鼓1的端部。圆筒部71的外周部是外周面71a。在外周面71a上设置有切除部71d,以形成基部74,其将在下文中进行描述。在圆筒部71中,在切除部71d的Z1侧的部分是被支承部71c。被支承部71c可旋转地由设置在鼓单元轴承部件39R中的支承部支撑。换句话说,被支承部71c由鼓单元轴承部件39R的支承部支撑,以使得感光鼓单元30可旋转。
类似地,设置在感光鼓单元30的非驱动侧的非驱动侧法兰部件29可旋转地由鼓单元轴承部件39L支撑。非驱动侧法兰部件29具有从感光鼓1的端部突出的圆筒部(圆筒部),该圆筒部的外周面29a可旋转地由鼓单元轴承部件39L支撑。
鼓单元轴承部件39R设置在处理盒7的驱动侧,鼓单元轴承部件39L设置在处理盒7的非驱动侧。
如图4所示,当处理盒7安装在设备主组件100A中时,鼓单元轴承部件39R抵接设置在成像设备主组件100A中的后侧盒定位部108。此外,鼓单元轴承部件39L抵接成像设备主组件100A的前侧盒定位部110。由此,盒7定位在成像设备100A中。
在本实施例的Z方向上,鼓单元轴承部件39R支撑被支承部71c的位置靠近鼓单元轴承部件39R定位于后侧盒定位部108处的位置。通过这样做,当处理盒7安装在设备主组件100A中时可以抑制联接件28的倾斜。
被支承部71c布置成使得轴承部件39R支撑被支承部71c的位置和轴承部件39R定位于后侧盒定位部108处的位置可以彼此靠近。也就是说,被支承部71c设置在联接件28中圆筒部71的外周面71a的自由端侧(Z1方向侧)上。
类似地,在Z方向上,鼓单元轴承部件39L可旋转地支撑非驱动侧法兰部件29的位置布置在靠近鼓单元轴承部件39L定位于前侧盒定位部110处的位置。由此,能够抑制非驱动侧法兰部件29的倾斜。
鼓单元轴承部件39R和39L分别安装到清洁框架14的两侧,并且支撑感光鼓单元30。由此,感光鼓单元30被支撑成可相对于清洁框架14旋转。
此外,充电辊2和清洁刮板6安装到清洁框架14,并且它们布置成与感光鼓1的表面接触。此外,充电辊轴承15(15R、15L)安装在清洁框架14上。充电辊轴承15是用于支撑充电辊2的轴的轴承。
这里,充电辊轴承15(15R、15L)安装成可沿图3所示箭头C的方向移动。充电辊2的旋转轴2a可旋转地安装在充电辊轴承15(15R、15L)上。通过作为推压器件的加压弹簧16把充电辊轴承15朝向感光鼓1推压。结果,充电辊2抵接感光鼓1并由感光鼓1带动旋转。
清洁框架14设置有清洁刮板6,其作为用于去除感光鼓1表面剩余调色剂的清洁器件。通过把抵接到感光鼓1以去除感光鼓1上调色剂的刮板状橡胶(弹性部件)6a和支撑刮板状橡胶(弹性部件)6a的支撑金属板6b一体化而形成清洁刮板6。在本实施例中,支撑金属板6b利用螺丝固定在清洁框架14上。
如上所述,清洁框架14具有开口14b,用于收集由清洁刮板6收集的转印残留调色剂。开口14b设置有防喷板26,其与感光鼓1接触并且在感光鼓1和开口14b之间进行密封,以便抑制调色剂朝开口14b的向上方向泄漏。
以此方式,通过采用将与成像有关的构件一体化到能够可拆卸地安装到设备主组件上的盒中的结构,提高了维护容易性。换句话说,用户可以通过更换处理盒来容易地进行设备的维护。因此,可以提供一种不仅可以由维修人员而且可以由用户进行维护操作的设备。
[主组件驱动轴的结构]
参考图5、图6、图7、图8和图9,将描述主组件驱动轴101的结构。
图5是主组件驱动轴的外视图。
图6是沿着安装到成像设备主组件上的主组件驱动轴101的旋转轴线(旋转轴线)截取的剖视图。
图7是沿着旋转轴线(旋转轴线)截取的联接件28和主组件驱动轴101的剖视图。
图8是沿着垂直于旋转轴线的平面截取的联接件28和主组件驱动轴101的剖视图。
图9是沿着旋转轴线截取的联接件28和主组件驱动轴101的剖视图。
如图5所示,主组件驱动轴101设置有齿轮部101e、轴部101f、粗略引导部101g和被支承部101d。
作为驱动源的电机(未示出)设置在成像设备主组件100A中。齿轮部101e从电机接收旋转驱动力,使得主组件驱动轴101旋转。此外,主组件驱动轴101包括可旋转的突出轴部101f,其从齿轮部101e沿着旋转轴线朝向盒侧突出。从电机接收的旋转驱动力通过设置在轴部101f中的凹槽形驱动传递凹槽101a(凹部、驱动过渡部)传递到盒7侧。此外,轴部101f的自由端部为半球形101c。
主组件驱动传递凹槽101a成形为使得将在下文中描述的接合部73的一部分可以进入。具体来说,其设置有主组件驱动传递表面101b,作为与联接件28的驱动力接收表面(驱动力接收部)73a接触以传递驱动力的表面。
此外,如图5所示,主组件驱动传递表面101b不是平表面,而是围绕主组件驱动轴101的旋转轴线扭转的形状。扭转方向使得:相对于主组件驱动轴101的旋转方向而言,主组件驱动轴101的Z1方向下游侧处于Z2方向下游侧的上游。在本实施例中,沿着接合部73的圆筒的旋转轴线方向的扭转量设定为约1度/1mm。在下文中将描述主组件驱动传递表面101b扭转的原因。
此外,主组件驱动传递凹槽101a的在Z2方向侧的表面上设有主组件侧拆卸锥部101i。主组件侧拆卸锥部101i是当从设备主组件100A拆卸处理盒7时用于辅助接合部73从驱动传递凹槽101a脱离的锥部(倾斜表面、倾斜部)。在下文中将对其细节进行说明。
这里,当驱动力从驱动传递凹槽101a传递到接合部73时,希望主组件驱动传递表面101b和驱动力接收表面(驱动力接收部)73a可靠地互相接触。因此,为了防止除主组件驱动传递表面101b之外的表面与接合部73接触,主组件驱动传递凹槽101a在旋转轴线方向、周向和径向(图8和图9)上相对于接合部73具有间隙(G)。
此外,在主组件驱动传递凹槽101a的轴向自由端侧设置有主组件侧拆卸锥部101i作为倾斜表面(倾斜部)。此外,在主组件驱动轴101的轴向上,半球形101c的中心101h设置在主组件驱动传递凹槽101a的范围内(图7)。换句话说,当中心101h和主组件驱动传递凹槽101a在主组件驱动轴101的轴线上投影时,中心101h在轴线上的投影区域在主组件驱动传递凹槽101a的投影区域内。在轴向上在轴部101f和齿轮部101e之间设置有粗略引导部101g(图6)。如图7所示,粗略引导部101g在轴部101f侧的自由端部处具有锥形,以及如图7所示,粗略引导部101g的外径D6小于联接件28的圆筒部71的内表面71b的内径D2。如图5所示,粗略引导部101g的外径D6大于轴部101f的外径D5。因此,当盒7插入成像设备主组件100A中时,主组件驱动轴101沿着联接件28被引导,以便减小圆筒部71的旋转中心和轴部101f的旋转中心之间的轴向未对准。因此,粗略引导部101g可称为插入引导部。
在完成了将盒7安装到成像设备主组件100A之后,粗略引导部101g的尺寸关系设定为使得其不抵接到内周面71b。
如图6所示,被支承部101d设置为跨齿轮部101e在粗略引导部101g的相反侧。被支承部101d可旋转地由设置在成像设备主组件100A中的轴承部件102支撑。
此外,如图6所示,通过成像设备主组件100A的弹簧部件103把主组件驱动轴101朝向盒7侧推压。然而,主组件驱动轴101在Z方向上的可移动量(游隙)约为1mm,比将在下文中描述的驱动力接收表面73a在Z方向上测量的宽度足够小。
如上所述,主组件驱动轴101设置有主组件驱动传递凹槽101a,联接件28设置有接合部73,以将驱动从主组件100A传递到盒7(鼓单元30)。
如下文中将详细描述的那样,接合部73设置在可弹性变形的基部74的自由端。因此,当把盒7安装到设备主组件100A时,接合部73配置成可至少径向向外移动。因此,随着盒7插入设备主组件100A中,接合部73进入驱动传递凹槽101a,并且接合部73和主组件驱动传递凹槽101a可以彼此接合。
[联接件的结构]
参考图4、图10、图11、图12、图13、图14和图15,将详细描述本实施例的联接件28。
图10是联接件28的立体图。
图11是沿着垂直于联接件28旋转轴线并且包括基部74的平面截取的联接件28的剖视图。
图12是联接件28的剖视立体图。
图13是沿着旋转轴线截取的联接件28的纵向剖视图。
图14是沿着垂直于旋转轴线并包括基部74的平面截取的联接件28和主组件驱动轴101的剖视图。
图15是沿着旋转轴线截取的联接件28和主组件驱动轴101的纵向剖视图。
如图10和图12所示,联接件28包括安装部72、圆筒部71、凸缘部75、接合部73、基部74和对准部76。安装部72是要安装到感光鼓1上的部分。圆筒部71具有大致圆筒状的构造。圆筒部71具有如上所述的被支承部71c,被支承部71c可旋转地由设置在鼓单元轴承部件39R中的支承部支撑。
接合部73至少在联接件28径向向内突出,以便与主组件驱动轴101接合。接合部73具有驱动力接收表面73a。驱动力接收表面73a是用于通过与驱动凹槽接触而从主组件驱动轴101接收驱动力的驱动力接收部。
基部(变形部、延伸部)74通过设置在联接件28的圆筒部71中的切除部71d而形成。切除部71d是角状U形的。基部74能够以基部74的根部74a为支点而变形,并且把接合部73以可移动的方式支撑。接合部73至少在联接件径向上可移动。
也就是说,驱动力接收表面(驱动力接收部)73a由基部(支撑部基部)74和接合部(突出部)73支撑。基部74和接合部73是用于支撑驱动力接收表面73a的支撑部。在该实施例中,支撑部大致平行于联接件28的轴向延伸。
如图10所示,安装部72包括压配合到感光鼓1的圆筒内径中的压配合部72d、夹紧凹槽72e和设置在压配合部72d后侧(相对于Z2方向侧)的压配合引导部72f。
作为结合部的压配合部72d是通过压入到感光鼓1中而将联接件28固定到感光鼓1的部分。具体来说,感光鼓1的圆筒内径和压配合部72d的外径的尺寸形成为建立压配合关系。该结构不限于通过夹紧来提高紧固力或者通过粘接来固定圆筒内径和压配合部72d的上述结构。
如图10所示,夹紧凹槽72e具有相对于Z轴方向设置在压配合部72d的感光鼓1侧的凹槽形状(凹部)。夹紧凹槽72e设置在围绕联接件28旋转轴线的等距离的两个位置处。在鼓单元30的旋转轴线方向(联接件28的旋转轴线方向)上,夹紧凹槽72e和凸缘部75设置成彼此重叠。
鼓单元30的轴线(旋转轴线、旋转中心线)Ax是延伸穿过鼓单元30旋转中心的虚拟直线。感光鼓1的轴线和联接件28的轴线设置成基本上彼此重叠,并且这些轴线基本上与鼓单元30的轴线Ax对准。因此,除非另有说明,每个轴线在下面的描述中可互换使用。
此外,轴向(旋转轴线方向)是轴线延伸的方向。鼓单元30的轴向和联接件28的轴向具有与鼓单元30的纵向(Z方向)相同的含义。
此外,“X和Y在方向A上重叠”是指当X和Y在沿平行于方向A延伸的直线上投影时,X的投影区域的至少一部分与Y的投影区域的至少一部分重叠。
也就是说,当夹紧凹槽72e和凸缘部75投影到鼓单元30(联接件28)的旋转轴线Ax上时,夹紧凹槽72e的投影区域和凸缘部75的投影区域至少部分地彼此重叠。
在直线上投影某物的情况下,除非另有说明,投影方向垂直于该直线。例如,“在轴线上投影A”是指“相对于轴线在垂直于轴线的方向上投影A”。通过在联接件28侧夹紧感光部件1端部的一部分,感光鼓1塑性变形。因此,感光部件的一部分进入夹紧凹槽72e的内部,以将感光鼓1和联接件28牢固地彼此固定。夹紧是指通过塑性变形来结合部件的操作。
在该实施例中,通过使感光鼓1的圆筒(铝)的一部分塑性变形而使其连接到联接件28。在该实施例中,夹紧凹槽72e作为用于将联接件28可靠地固定到感光鼓1的器件的示例,但是也可以通过圆筒内径部和压配合部72d之间的粘接来固定联接件28,或者可以使用其它固定方式。因此,夹紧凹槽72e不是必不可少的结构。
压配合引导部72f具有的形状使得在联接件28组装到感光鼓1上时更容易将联接件28安装到感光鼓1并且将压配合部72d稳定地压配合到感光鼓1中。具体来说,压配合引导部72f的外径小于压配合部72d的外径和感光鼓1的圆筒内径,并且在安装到感光鼓1的安装方向上的自由端侧具有引导锥部72g。引导锥部72g是设置在联接件28上的倾斜部,以便于将联接件28插入感光鼓1的内部。
如上所述,圆筒部71在外周面71a的自由端侧(Z1方向侧)具有被支承部71c(如图4、图10所示)。此外,在圆筒部71的被支承部71c的压配合部72e侧设置有切除部71d。切除部71d形成基部74,其可弹性变形地支撑接合部73(将在下文中描述接合部73的细节)。也就是说,在Z方向上,切除部71d、接合部73和基部74设置在被支承部71c和压配合部72e之间。
换句话说,联接件28具有切除部71d、接合部73以及从基部74起在Z1方向侧(轴向外侧)具有圆筒外形的被支承部71c。通过使用此种形状,接合部73和基部74不会在盒7的外表面露出。因此,接合部73和基部74可以由鼓单元轴承部件39R和被支承部71c保护。
这可以防止用户无意地接触接合部73和基部74,并且当盒7掉落时抑制外物直接接触接合部73和基部74。
此外,如图12所示,圆筒部71的内周面71b在前自由端(Z1方向)具有锥形。锥形是用于引导主组件驱动轴101插入圆筒部71中的倾斜部(倾斜表面)。
当主组件驱动轴101插入圆筒部71中时,圆筒部71的内周面71b引导主组件驱动轴101。圆筒部71的内周面71b是用于引导主组件驱动轴101的盒侧引导部并具有圆周形状。
当盒7插入成像设备主组件100A中时,主组件驱动轴101被沿着联接件28引导,以便减小圆筒部71的旋转中心和轴部101f的旋转中心之间的轴向偏差。此外,如图7所示,内周面71b的内径D2大于主组件驱动轴101的轴部101f的外径D6。因此,在完成了将盒7安装到成像设备主组件100A中后,内周面71b不与粗略引导部101g接触。
如图13所示,凸缘部75具有在径向上从压配合部72d向外突出的形状。当把联接件28组装到感光鼓1上时,感光鼓1的端面抵接凸缘部75的端面75b,从而确定了感光鼓1和联接件28在Z方向的位置。
如图11所示,接合部73在联接件28的周向上以等间隔布置在三个位置处(120度间隔,基本上等间隔)。类似地,基部74和切除部71d也在圆筒部71的周向上以等间隔布置在三个位置处。基部74通过切除部71d而形成。基部74具有在圆筒部71中的固定端,并能够以该固定端为支点弹性变形。
基部74是沿联接件28的轴向(感光鼓单元30的轴向)延伸的部分(延展部,延伸部)。也就是说,基部74至少在轴向上向外延伸。
接合部73设置在基部74的顶端(自由端)处。接合部73是沿联接件28的径向朝向内侧(感光鼓单元30的径向内侧)突出的突出部(突起部、凸部)。也就是说,接合部73是沿与基部74延伸的方向交叉的方向突出的突出部(突起部,凸部)。
接合部73的横截面形状不是圆形(非圆形),更优选地其具有角部。这是因为这样接合部73能与形成在主组件驱动轴101中的驱动传递凹槽101a可靠地接合。
也就是说,当在设置有驱动接收部73a的位置处垂直于联接件轴线Ax将支撑部(接合部73)切开时,横截面形状是非圆形的。
接合部73由可弹性变形的基部74支撑,并且可以通过基部74的变形而在联接件28的径向上移动。换句话说,基部74也是在受到外力时发生变形并且在返回到自由状态位置的方向上提供恢复力的变形部(弹性变形部,挠性部)。
具体来说,当接合部73接触主组件驱动轴101的外周面时,接合部73弹性变形,使得接合部73沿主组件驱动轴101的外周面在径向上向外移动。之后,当接合部73处于与设置在主组件驱动轴101外周面上的主组件侧驱动传递凹槽101a相同的位置(同相)时,接合部73的弹性变形消除。然后,接合部73在径向上向内移动,使得接合部73的一部分能够进入主组件驱动传递凹槽101a。
从驱动稳定性的观点来看,优选在圆筒的周向上设置多个接合部73。
联接件28的驱动力接收表面73a具有围绕联接件28的轴线扭转的形状,并且在该实施例中,扭转量设定为与主组件驱动传递表面101b的扭转量相同。
只要驱动力接收表面73a在旋转方向上与驱动轴101接触的两个接触点具有不同相位就行。也就是说,驱动力接收表面73a可以不必具有扭转形状,只要具有与扭转表面相同的功能即可。
例如,只要形状使得驱动力接收表面73a的外侧(Z1方向的下游侧)相对于内侧(Z2方向的下游侧)是在感光鼓1旋转方向的上游侧就行。换句话说,沿着接合部73圆筒轴线方向连接圆筒内端部和圆筒外端部的连线与圆筒旋转轴线交叉。驱动力接收表面73a是相对于联接件28的轴线倾斜的倾斜部。
通过以此方式采用驱动力接收表面73a的扭转形状或倾斜形状之一,当驱动力接收表面73a接收驱动力时,感光鼓单元30将接收在拉向主组件驱动轴101的被支承部101d的方向上的力。
这里,在图8中,接合部73可以在联接件28的径向(感光鼓单元30的径向)上缩回和向外移动。设置在接合部73中的驱动力接收表面73a相对于接合部73的移动方向是倾斜的。在图8所示的剖视图中,直线B1是沿着接合部73缩回移动的方向(接合部在径向上移动的方向)的直线。直线B2是沿着驱动力接收表面73a的直线。应当理解,直线B1和直线B2彼此交叉。由此,在驱动力接收表面73a与驱动传递凹槽101a接触的状态下,驱动力接收表面73a咬合入驱动传递凹槽101a,使得接合部73不容易从驱动传递凹槽101a退出。也就是说,接合部73和驱动传递凹槽101a之间的接合状态得以稳定。
特别地,驱动力接收表面73a相对于接合部73的移动方向(线B1)倾斜,使得内径侧(自由端侧)相对于联接件28的旋转方向是在外径侧(根侧)的上游。因此,当联接件28(感光鼓单元30)旋转时,从驱动力接收表面73接收的力是在使接合部73与主组件驱动传递凹槽101a接合的方向上。接合部73与主组件驱动传递凹槽101a之间的接合状态得以稳定,并且抑制了接合部73与主组件驱动传递凹槽101a之间的脱离。
如图13所示,接合部73在Z方向上感光鼓单元30的外侧(Z1方向侧)具有插入锥形表面73d。插入锥形表面73d是在轴向上面向外侧的倾斜部。当联接件28与主组件驱动轴101联接时,插入锥形表面73d骑在主组件驱动轴101上,使得接合部73沿径向向外缩回。插入锥形表面73d是安装时力接收部,用于在安装盒时接收用于在径向上缩回的力。
此外,接合部73具有在Z方向上感光鼓单元30的内侧(Z2方向侧)作为拆卸时力接收部的拆卸锥形表面73e。拆卸锥形表面73e是在轴向上面向内侧的倾斜部。当拆卸盒时,即,当从主组件驱动轴101脱开联接件28时,拆卸锥形表面73e骑在主组件驱动轴101上。当拆卸锥形表面73e从主组件驱动轴接收力时,接合部73径向向内移动以脱离主组件驱动轴。
利用这些结构,可以提高将联接件28安装到主组件驱动轴101和从其上拆卸的性能。两个锥形表面都是相对于轴向倾斜的倾斜部。
当安装盒时,插入锥形表面73d和半球形101c彼此抵接,以使接合部73沿着驱动轴的径向向外移动。此外,在拆卸盒时,拆卸锥形表面73e和主组件侧拆卸锥部101i彼此接触,以使接合部73(驱动力接收表面73a)沿着主组件驱动轴101的径向朝外移动。当联接件28的驱动力接收部73a连接到主组件驱动轴101或从其脱开时,驱动力接收部73a从主组件驱动轴101接收力,使得联接件28的驱动力接收部73a径向向外移动。
此外,接合部73设置成使得在Z方向上驱动力接收表面73的长度L2相对于从圆筒部71的前端面到接合部73的前端面的距离L1满足L1>L2。
对准部76具有径向定位部76a。径向定位部76a是用于确定主组件驱动轴101径向位置的部分。换句话说,径向定位部76a是用于确定联接件28相对于主组件驱动轴101的径向位置的部分。也就是说,径向定位部76a是用于确定主组件驱动轴101和联接件之间相对位置关系的定位部。
径向定位部76a具有弧形曲面,并且该曲面与主组件驱动轴101的外周面接触,以限制主组件驱动轴101在径向上的移动。也就是说,径向定位部76a具有曲面,其沿着联接件28的周向(旋转方向)面向联接件28的轴线侧。径向定位部76a设置在内周面71b的轴向内侧(图12),径向定位部76a的内径小于内周面71b。内周面71b是具有较大直径的第一内径部,径向定位部76a是具有较小直径的第二内径部。
如图14所示,沿着联接件28的轴向观察,径向定位部76a设置在远离接合部73的位置处。此外,在联接件28的径向上,径向定位部76a设置在接合部73的自由端(驱动力接收表面73a的自由端)的外侧,并且设置在基部74的固定端(根部)的内侧。
另一方面,在Z方向上,径向定位部76a设置在与接合部73重叠的位置(图15)。也就是说,当径向定位部76a和接合部73垂直于联接件28的轴线投影时,它们的投影区域的至少一部分在轴线上彼此重叠。
利用此布置关系,即使主组件驱动轴101以径向定位部76a为支点倾斜,主组件驱动轴101和接合部73之间的相对位置也不易改变,因此主组件驱动轴101和接合部73之间的接合不受影响。
径向定位部76a的内径D7与主组件驱动轴101的轴部101f的外径D5大致相同。如上所述,接合部73在联接件28的周向上以等间隔布置在三个位置处(120度间隔,基本上等间隔)。相应地,三个径向定位部76a在联接件28的周向上以等间隔类似地布置。结果,径向定位部76a可以相对于轴部101f沿径向在三个位置处定位联接件28。
此外,对准部76具有抵接部76b。如图15所示,当驱动力从主组件驱动轴101传递到联接件28时,抵接部76b与半球形101c接触。半球形101c是设置在主组件驱动轴101顶端的大致半球形部。
此外,在Z方向上,抵接部76b设置在联接件28中,使得在抵接部76b和半球形101c接触的状态下,主组件驱动轴101的半球形101c的中心101h在驱动力接收表面73a的范围内。
在该实施例中,联接件28是一体件。然而,例如,通过使对准部76与其它部分不一体,联接件28可以包括两个部件。联接件28可以通过由多个部件构成其它部分而由三个以上单独部件来构成。
[将盒安装到成像设备主组件上]
参考图16和图17,将描述处理盒7相对于成像设备主组件的安装和拆卸。
图16是示出将盒7安装到成像设备主组件100A的立体图。
图17是示出了把盒7安装到成像设备主组件100A的安装操作的剖视图。
本实施例的成像设备主组件100A采用能够在大致水平方向上安装盒的结构。具体来说,成像设备主组件100A具有能够安装盒的内部空间。成像设备主组件具有在主组件100A前侧(靠近使用中站立用户的一侧)的盒门104(前门),用于将盒插入到空间中。
如图16所示,成像设备主组件100A的盒门104设置成能够开闭。当盒门104打开时,用于引导盒7的下部盒导轨105设置在限定了空间的底部表面上,上部盒导轨106设置在上部表面上。通过设置在空间上方和下方的上部导轨105和下部导轨106把盒7引导到安装位置。盒7基本上沿着感光鼓单元30的轴线插入到安装位置。
下面将参考图17描述将盒安装到成像设备主组件100A和从其上拆卸的操作。
如图17的部分(a)所示,鼓单元轴承部件39R或感光鼓1在盒7的插入开始时不接触中间转印带5。换句话说,尺寸关系设定成使得在相对于盒7插入方向的后侧端部由下部盒导轨105支撑的状态下感光鼓1和中间转印带5彼此不接触。
如图17的部分(b)所示,成像设备主组件100A包括后侧下部盒引导件107,其在下部盒导轨105的插入方向的后侧从下部盒导轨105相对于重力方向向上突出。后侧下部盒引导件107在相对于盒7插入方向的前侧设置有锥形表面107a。随着插入,盒7骑到锥形表面107a上并引导到安装位置。
只要在盒插入设备主组件100A中时盒的部分不摩擦中间转印带5的成像区域5A,则后侧下部盒引导件107的位置和形状可以是任意的。这里,成像区域5A是在中间转印带5上承载着将要转印到记录材料12上的调色剂图像的区域。此外,在本实施例中,在安装姿态下盒的各部分中,设置在盒7插入方向后侧的鼓单元轴承部件39R相对于重力方向向上突出最多。因此,只要适当地选择每个元件的布置和形状使得在插入盒时在插入方向上最远的鼓单元轴承部件39R的端部轨迹(以下称为插入轨迹)不干扰成像区域5A就行。
之后,如图17的部分(c)所示,盒7从盒在后侧下部盒引导件107上的状态进一步插入到成像设备主组件100A的后侧。然后,鼓单元轴承部件39R抵接设置在成像设备主组件100A中的后侧盒定位部108。此时,盒7(感光鼓单元30)相对于盒7(感光鼓单元30)完全安装在成像设备主组件100A中的状态(图17的部分(d))而言倾斜约0.5至2度。也就是说,在盒7的插入方向上,盒7(感光鼓单元30)的下游侧比上游侧更高。
图17的部分(d)是当盒门104关闭时设备主组件和盒的状态的图示。在下部盒导轨105相对于插入方向的前侧,成像设备100A具有近侧盒下部引导件109。前侧盒下部引导件109配置为随着盒门(前门)104的开闭而上下移动。
当用户关闭盒门104时,前侧盒下部引导件109升起。然后,鼓单元轴承部件39L和成像设备主组件100A的近侧盒定位部110彼此接触,使得盒7相对于成像设备主组件100A定位。
利用上述操作,盒7到成像设备主组件100A的安装完成。
此外,以与上述插入操作相反的顺序执行盒7从成像设备主组件100A的拆卸。
由于如上所述采用了倾斜安装结构,当把盒7安装在设备主组件100A上时可以抑制感光鼓和中间转印带之间的摩擦。基于此原因,可以抑制在感光鼓的表面或中间转印带的表面上产生微小划痕(划痕)。
此外,与盒水平移动并安装到设备主组件后整个盒抬起的结构相比,该实施例的结构可以简化成像设备主组件100A的结构。
[联接件与主组件驱动轴的接合过程]
参考图18和图19,将详细描述联接件28和主组件驱动轴101的接合过程。
图18是示出联接件28安装到主组件驱动轴101的操作的剖视图。
图19是示出了当主组件驱动轴101从主组件驱动传递凹槽101a和接合部73(驱动力接收表面73a)的相位不对准的状态旋转到相位对准的状态时,将联接件28安装到主组件驱动轴101的操作的剖视图。
图18的部分(a)是联接件28已经开始与主组件驱动轴101接合的状态的图示。图18的部分(e)示出了盒7安装到成像设备主组件100A上的状态。特别地,图18的部分(e)示出了前侧盒下部引导件109随着盒门104关闭而升起以及盒7相对于成像设备主组件100A定位的状态。
在图18的部分(a)和图18的部分(e)之间的图18的部分(b)至图18(d)是将联接件28连接到主组件驱动轴101的过程的图示。主组件驱动轴101由于其自重而以非常小的角度沿重力方向向下悬垂。
图19是主组件驱动传递凹槽101a和接合部73(驱动力接收表面73a)的相位未对准的状态的图示。
如已参考图17的部分(b)所描述的,盒7骑在后侧下部盒引导件107上。也就是说,盒7在逐渐增加倾斜度直到达到图17的部分(a)至图17的部分(b)的状态的情况下处于倾斜约0.5至2度的状态。然后,盒7骑在后侧下部盒引导件107上。
类似地,如图18的部分(a)所示,与将盒7相对于成像设备主体100A定位的状态(如图18的部分(e)所示)相比,联接件28以倾斜约0.5至2度的状态插入主组件驱动轴101上。
如图6所示,主组件驱动轴101在被支承部101d处悬伸。此外,齿轮部101e与用于将驱动传递到齿轮部101e的齿轮(未示出)啮合。图18的部分(a)是主组件驱动轴101不与联接件28抵接的状态的图示。在这种状态下,与盒7相对于成像设备主组件100A定位的状态(图18的部分(e)所示)相比,盒7在由其自重确定的方向和围绕被支承部101d的接合方向上倾斜θ1度。
如图18的部分(b)所示,联接件28的圆筒部71的内周面71b的顶端首先抵接主组件驱动轴101的粗略引导部101g。如图所示,主组件驱动轴101配置成在被支承部101d处悬伸。因此,主组件驱动轴101的粗略引导部101g插入到其与联接件28的内周面71b嵌合的状态。如上所述,在Z方向上,接合部73设置成使得从圆筒部71的前端面到接合部73的前端面的长度L1和驱动力接收表面73的长度L2满足L1>L2(如图13所示)。因此,在主组件驱动轴101的自由端处的半球形101c碰撞接合部73之前,主组件驱动轴101的粗略引导部101g沿联接件28的内周面71b而行。结果,主组件驱动轴101由联接件28引导,从而防止主组件驱动轴101的自由端处的半球形部101c碰撞接合部73或基部74的非预期部分。这对于保护接合部73和基部74是有效的。
如图18的部分(c)所示,当联接件28进一步朝向主组件驱动轴101的后侧插入时,接合部73的插入锥形表面73d和主组件驱动轴101的半球形101c彼此抵接。由于插入锥形表面73d的倾斜表面和半球形101c的球形,主组件驱动轴101基本上引导到三个接合部73的中心。
当联接件28进一步插入到主组件驱动轴101上时,基部74径向向外弹性变形,使得接合部73沿半球形101c而行。结果,如图19的部分(a)所示,接合部73朝主组件驱动轴101的轴部101f的外径表面移动(缩回)。通过此运动,如图18的部分(d)所示,联接件28安装到主组件驱动轴101,直到接合部73的拆卸锥形表面73e在Z方向上比主组件驱动轴101的主组件侧拆卸锥部101i更深。
之后,如上所述,盒7抬起,使得盒7的鼓单元轴承部件39L碰撞前侧盒定位部110。通过如此抬起盒7,盒7相对于成像设备主组件100A定位(如图17的部分(d)所示)。通过盒7的此种操作,消除了联接件28的倾斜,如图18的部分(e)所示。
如图19的部分(b)所示,当主组件驱动轴101旋转时,主组件驱动传递凹槽101a和接合部73变成具有相同的相位。结果,消除了基部74的弹性变形,接合部73的一部分进入主组件驱动传递凹槽101a,并且联接件28和主组件驱动轴101彼此接合。
当主组件驱动传递凹槽101a和接合部73的相位对准时,基部74的弹性变形在图17的部分(d)的阶段处解除,并且状态变成如在图19的部分(b)所示,使得主组件驱动轴101可以经由联接件28将驱动力传递到盒7。
如上所述,随着盒7安装在设备主组件100A中,主组件驱动传递凹槽101a和接合部73可以彼此接合。因此,不需要移动主组件驱动轴101以与联接件28接合。也就是说,不需要在成像设备的设备主组件100A中提供用于移动主组件驱动轴101以便与联接件28接合的机构。在传统结构中,提供了用于在将盒7安装到成像设备主组件100A之后移动主组件驱动轴101以便与联接件28接合的机构。然而,在本实施例中,可以从设备主组件100A中省略此机构。
当盒7安装在设备主组件100A上时,联接件28的接合部73与主组件驱动轴101接触以径向向外退出。接合部73配置成通过径向向内移动而与主组件驱动轴101的凹槽(主组件驱动传递凹槽101a)接合。
这里,也可以在联接件上设置用于接收驱动的凹槽,以及在主组件驱动轴101侧设置通过沿径向移动而与凹槽接合的可动部。然而,与盒7相比,成像设备主组件100A需要具有更高的耐久性。从成像设备主组件100A的耐久性的观点出发,如在本实施例中所示,优选地在盒7的联接件28侧设置沿径向移动的可动部(接合部73)。
[从主组件驱动轴移除联接件]
参考图20,将描述将联接件28从主组件驱动轴101移除的操作。
图20是示出联接件28从主组件驱动轴101上移除的操作的剖视图。
如图20的部分(a)所示,在主组件驱动轴101的旋转驱动停止时,驱动力接收表面73a和主组件驱动传递表面101b彼此接触。在该状态下,接合部73的一部分进入主组件驱动传递凹槽101a。
当盒门104打开时,下部前侧盒引导件109下降,并且鼓单元轴承部件39L从成像设备主组件100A的前侧盒定位部110分开。此时,如图20的部分(b)所示,联接件28和主组件驱动轴101相对于安装完成状态时(Z方向)倾斜约
当盒7开始从成像设备主组件100A拆除时,如图20的部分(c)所示,接合部73的拆卸锥形表面73e抵接主组件侧拆卸锥部101i。当拆卸锥形表面73e抵接主组件侧拆卸锥部101i时,基部74开始弹性变形并使接合部73沿着主组件侧拆卸锥部101i径向向外移动。
此外,当联接件28进一步从主组件驱动轴101移除时,状态与图19的部分(a)所示的相同,并且基部74进一步弹性变形,接合部73朝主组件驱动轴101的轴部101f的外径表面移动。通过将接合部73移动到轴部101f的外径表面,联接件28可以从主组件驱动轴101移除,如图20的部分(d)所示。
此外,当联接件28进一步从主组件驱动轴101移除时,如图20的部分(e)所示,基部74的弹性变形解除,并且接合部73的位置返回到弹性变形前的位置。
通过上述操作,联接件28可以从主组件驱动轴101移除。
在本实施例中,如图12所示,基部74和U形切除部71d配置在接合部73的Z1方向下游侧,但如图21所示,接合部73可以布置在基部74和U形切除部71d的Z1方向下游侧。可以根据成像设备主组件100A中的主组件驱动轴101和联接件28的布置来适当地选择。
通过使用该实施例的联接件28和主组件驱动轴101,可以省略用于移动主组件驱动轴101的机构。换句话说,在该实施例中,当盒7安装到成像设备主组件101A时,联接件28设置在联接件28可与主组件驱动轴101接合的位置处。因此,不需要使主组件驱动轴101相对于联接件28移动,联接件28和主组件驱动轴101就能够彼此接合。
此外,通过使用本实施例的联接件28,接合部73和基部74不会在盒7的外表面露出。由此,可以保护接合部73和基部74。
在本实施例中,驱动力接收部73a及其支撑部(接合部73和基部74)全部在轴向上布置在鼓单元轴承部件39R的支承部的内部。然而,只要驱动力接收部73a及其支撑部(接合部73和基部74)的至少一部分在轴向上布置在轴承部件39R的支承部的内部,则接合部73和基部74就可得到保护。此外,即使支承部设置成与驱动力接收部73a及其支撑部(接合部73和基部74)在轴向上重叠,驱动力接收部73a及其支撑部也得到保护。
也就是说,当支承部、接合部73和基部74投影到联接件的轴线上时,接合部73、驱动力接收部73a和基部74的投影区域可以与支承部的投影区域重叠。
<实施例2>
将参考图22、图23、图24、图25、图26和图27描述实施例2。
图22是根据实施例2的联接件228的剖视立体图。
图23是根据实施例2的联接件228的立体图。
图24是从Z方向的内侧观察的根据实施例2的联接件228的视图。
图25是示出了根据实施例2将联接件228安装到主组件驱动轴101的操作的剖视图。
图26是从Z方向的外侧观察的根据实施例2的联接件228的图示。
将相同的名称分配给与实施例1相对应的元件。对于它们,将详细给出与上述元件的构成和动作等有所不同的相关详细说明,并且在某些情况下可以省略相同点的说明。
在该实施例中,可动地支撑驱动力接收部273a的支撑部(接合部273和基部274)的至少一部分设置在感光鼓1的内部。特别地,支撑部的固定端(即基部74的根部274a)设置在感光鼓1内部(图25)。以下将对细节进行说明。
在该实施例中,联接件228是安装到圆筒(感光鼓1)的驱动侧端部处的法兰部件。联接件228具有构造成与主组件驱动轴101接合的接合部273和用于支撑接合部273的基部274。
接合部273设置有驱动力接收表面273a。驱动力接收表面273a是驱动力接收部(驱动力接收部),其可以从盒外部(鼓单元外部),也就是说从设备主组件,接收用于使感光鼓1旋转的驱动力(旋转力)。
接合部273和基部274是用于支撑驱动力接收表面(驱动力接收部)273a的支撑部。
在实施例1中,圆筒部71设置有切除部71d,基部74从圆筒部71延伸。基部74具有在Z方向上布置在被支承部71c和安装部72之间的形状。
将考虑以下情况,其中:在主组件驱动轴101的驱动传递凹槽101a和联接件28的接合部73的相位不匹配的状态下(如图19(a)所示),安装有盒的成像设备长时间保持未操作。在此情况下,不仅基部74而且圆筒部71的基部74的根部74a附近都会蠕变变形。
这里,被支承部71c和压配合部72d之间的对准精度较高,使得被支承部71c的轴线和安装部72的压配合部72d的轴线是同轴的。然而,即使在这种情况下,圆筒部71的根部74a附近的蠕变变形量也不一定是均匀的。因此,如果基部74的根部74a的附近也蠕变变形,那么用于保持被支承部71c中心轴线和压配合部72d中心轴线对准的同轴精度会趋于劣化。
如果被支承部71c的轴线和压配合部72d的轴线的同轴精度降低,则被支承部71c的轴线和感光鼓1的轴线的同轴精度也有可能劣化。结果,感光鼓1的旋转精度也劣化,结果是有可能不利地影响图像质量。
在这种情况下,在本实施例中,基部274具有在联接件228的轴向上从安装部272的内周圆筒272h朝接合部273向外延伸的形状。也就是说,基部274是至少沿轴向延伸的延伸部(延展部,延长部)。接合部273是由基部274支撑的突出部(突起部,凸部)。
安装部272是围绕周边具有多个肋的圆筒部,但是基本上是圆筒形的,并且是固定成与感光鼓1内周接触的部分(内周接触部,被固定部)。此外,圆筒部271在轴向上设于安装部272的外侧。
接合部273的突出方向与基部274延伸的延伸方向交叉。此外,接合部273至少朝向联接件的径向内侧突出。
与实施例1类似,接合部273设置有驱动力接收部,用于从鼓单元30外部(即,驱动轴101)接收驱动力。接合部273和基部274是支撑部,用于支撑驱动力接收部273a以使其至少在联接件径向上可移动。更详细地,基部274以其固定端为支点而变形,使得驱动力接收部273a至少在联接件径向上可移动。
内周圆筒272h是安装部272的内径部,并且具有圆筒形状。
通过将基部274的根部(后端)274a设置在内周圆筒272h中,即使基部274的根部274a附近蠕变变形,也可以抑制影响扩展到圆筒部271的被承载部271c。也就是说,安装部272的外周部(压配合部272d)由感光鼓1覆盖,因此安装部272几乎不变形。因此,即使基部274的根部274a暂时变形,也能够抑制与基部274连接的安装部272本身的变形。结果,抑制了整个联接件228的变形,从而也可以抑制设置在联接件228自由端侧的被承载部271c的变形。
此外,通过将基部274安装到难以变形的安装部272上,可以抑制基部274的变形和倾转。也就是说,通过将基部274的根部274a设置在安装部272的内周圆筒272h上,可以抑制根部274a的倾转。基于此原因,当联接件228从主组件驱动轴101接收驱动力时,可以有助于感光鼓1的稳定旋转。
如果压配合引导部272f的外径与内周圆筒272h的内径之差不够大,则在一些情况下压配合引导部272f和内周圆筒272h可以都不是圆形的。此时,压配合引导部272f的形状可以是如本实施例中径向布置的多个肋。即使具有此形状,压配合部272d也可以稳定地压配合到感光鼓1中。
此外,在本实施例中,如图23所示,在安装部272的外周部上径向布置有多个肋,这些肋是压配合引导部272f。如图24所示,基部274的根部274a设置在对应于形成压配合引导件272f的多个肋的位置。因此,当从主组件驱动轴101接收驱动力时,驱动力通过肋从根部274a传递到压配合部272d,使得可以进一步抑制由于驱动力引起的内周圆筒272h的变形。
如图25所示,当基部274的根部274a设置在安装部272中时,根部274a设置在感光鼓(鼓筒)1的内部。也就是说,基部274和感光鼓1投影到感光鼓1的轴线Ax(=联接件228的轴线)上。然后,基部274的投影区域A274的一部分(根部274a侧的投影区域)与感光鼓1的投影区域A1的一部分在轴线上重叠。
在“A在感光鼓1内部”的情况下,当沿着轴线Ax观察感光鼓以及当沿垂直于轴线Ax的方向观察感光鼓时,A是感光鼓的内部。
在该实施例中,基部274设置成使得根部274a侧的区域的一部分与感光鼓1的区域重叠,但是基部274可以设置成使得整个基部274与感光鼓1重叠。换句话说,整个基部274可以设置在感光鼓1的内部。在下文中将参考实施例3(图28)描述此结构。
将描述接合部273。如图22和图25所示,在接合部273的外径侧设置有锥部273f。与实施例1同样,在本实施例中,当主组件驱动轴101的驱动传递凹槽101a和接合部273的相位彼此不对齐时,基部274变形并且接合部273径向向外移动。由于接合部273通过该缩回操作避免了撞击主组件驱动轴101,所以联接件228可以安装到主组件驱动轴101。当联接件228安装到主组件驱动轴101时,接合部273的拆卸锥形表面273e从主组件驱动轴101的主组件侧拆卸锥部101i沿Z方向朝后侧移动。
在将联接件228安装到主组件驱动轴101的过程中,接合部273的径向向外移动量随着距基部274的根部274a的距离增加而增加。在不存在锥部273f的情况下,当接合部273的缩回量较大时,接合部273与圆筒部271的内周面271b相互干扰,如图25的部分(a)的虚线所示。因此,通过设置锥部273f,即使接合部273在径向上大幅移动,也能够防止接合部273与圆筒部271的内周面271b干扰。结果,主组件驱动轴101的轴部101f的外径D5能够最大化。
在弹性变形消除的状态(自然状态)下,基部274和联接件228的内表面(内周面271b)之间的距离随着从后端向自由端而增加。
之后,类似于实施例1,如图25的部分(b)所示,通过主组件驱动轴101的旋转,当驱动传递凹槽101a和接合部273的相位对准时,基部274的弹性变形解除。然后,接合部273沿径向向内移动以进入驱动传递凹槽101a。驱动可以通过接合部273从主组件驱动轴101传递到联接件228。
类似于实施例1,如图22和图26所示,对准部276具有径向定位部276a。径向定位部276a设置在与接合部273在Z方向(轴向)上重叠的位置处。也就是说,当径向定位部276a和接合部273投影到联接件228的轴线(感光鼓1的轴线)上时,径向定位部276a的投影区域和接合部273的投影区域彼此至少部分地重叠。
另一方面,当沿联接件228的轴向观察时,径向定位部276a设置在接合部273外部的位置处。图24是沿着轴向观察的联接件228的图示。从该图可以看出,径向定位部276a不与接合部273重叠,并且在它们之间有一定量的间隙。此种布置关系主要是由于制造联接件228的原因。在下文中将对细节进行说明。
此外,如图22和图25(b)所示,对准部276具有抵接部276b。当主组件驱动轴101的驱动传递到联接件228时,抵接部276b抵接在主组件驱动轴101自由端处的半球形101c。由此,确定了联接件228在轴向上相对于主组件驱动轴101的位置。
<实施例3>
参考图28,将描述实施例3。
图28是根据实施例3的沿着旋转中心线(旋转轴线)截取的联接件(法兰部件)328和主组件驱动轴101的剖视图。
与上述实施例(特别是实施例2)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件相似点的描述。将主要对与上述元件的不同之处进行描述。
在该实施例中,驱动力接收部373a和可动地支撑驱动力接收部373a的支撑部(接合部373和基部374)全部设置在感光鼓1的内部。
本实施例的联接件328具有用于与主组件驱动凹槽101a接合的接合部373和用于支撑接合部的基部374。根部374a连接到法兰部件的内周圆筒372h,使得基部374由联接件328支撑。
接合部373设置有驱动力接收部,其与主组件驱动凹槽101a接触并且从主组件驱动凹槽101a接收驱动力。接合部373及其驱动力接收部的形状与实施例2的接合部273和驱动力接收部273a的形状相同,并因此省略其详细说明。
接合部373是由基部374支撑的突出部(突起部)。接合部373至少在联接件径向上向内突出。基部374是在与接合部373的突出方向交叉的方向上延伸的延伸部(延展部,延长部)。基部374也是构造成可弹性变形的可变形部(弹性变形部,挠性部)。
接合部373设置有驱动力接收部,并且接合部373和基部374是可移动地支撑驱动力接收部的支撑部。
在实施例2中,如图22和图25所示,接合部273在Z方向上设置在圆筒部272的内部。
另一方面,在本实施例中,接合部373在Z方向上形成在安装部372的内部。这里,安装部372是压入感光鼓1内周并安装在感光鼓1上的部分。因此,接合部373和驱动力接收部位于感光鼓1的内部。更具体地,当感光鼓1和接合部373投影到感光鼓1的轴线上时,感光鼓1的区域和接合部373的区域(接合部373的具有驱动力接收部的区域)彼此重叠。更具体地,接合部373(驱动力接收部)的所有区域包括在感光鼓1的区域中。
通过采用此种形状,可以使感光鼓1设置成在Z方向上比实施例2更靠近主组件驱动轴101侧(Z1方向侧)。因此,有助于盒7和成像设备100在Z方向上的小型化。或者,接合部373和基部374的部分可以设置在用户难以接触的感光鼓1背侧,因此可以保护这些部件。
优选地,整个接合部373设置在感光鼓1的内部。然而,只要接合部373(驱动力接收部)的至少一部分在感光鼓1内部,也可提供上述效果。也就是说,只要在感光鼓1和接合部373投影到感光鼓1的轴线上时感光鼓1的区域和接合部373的区域(驱动力接收部的区域)在轴线上至少部分地彼此重叠就可以。
基部374也位于感光鼓1的内部。也就是说,当感光鼓1和基部374投影到感光鼓1的轴线上时,感光鼓1的投影区域和基部374的投影区域彼此重叠。
<实施例4>
将描述第四示例(实施例4)。本实施例是实施例2的结构的变型例。因此,在本实施例的说明之前,将再次说明实施例2中所示的联接件228的特征。
在实施例2中,联接件228具有的形状是使得基部274在联接件228的轴向上从安装部272的内周圆筒272h朝向接合部273延伸(图25)。
此外,当联接件228投影到垂直于联接件228轴线的投影平面上时,对准部276等布置成满足以下关系。也就是说,在投影平面中,对准部276不与接合部273、基部274或者在接合部273和基部274周围1mm的区域重叠。换句话说,当沿着轴线观察联接件228时,在对准部276和接合部273之间存在约1mm的间隙(离隙),在对准部276和根部274a之间也存在约1mm的间隙(离隙)。
联接件228具有上述结构的原因是联接件228是通过以下制造方法制造的。
(制造方法说明)
实施例2的联接件228通过使用模具的注塑成型(嵌入成型)制造。
参考图27,将描述用于成型联接件228的金属模具的结构。
联接件228具有的形状是凸缘部275沿径向向外突起。在成型此种形状的情况下,优选地,金属模具如图27所示。
具体地,如图所示,金属模具具有两件式结构,包括左模具(圆筒侧模具60)和右模具(安装部侧模具61)。通过对准左右模具,形成了具有与成型产品相同形状的空间部(模具腔,中空部)。将材料注入该空间部并在模具中固化,由此提供联接件228。模具具有这样的结构,其中,在形成凸缘部275的空间附近设置有模具分型面62(模具沿其分开的平面,两个半模在此处接触的平面),该模具分型面是用于右模具和左模具配合的部分。圆筒侧模具60的形状包括用于成型圆筒部271外周的空间。类似地,安装部侧模具61的形状具有用于成型安装部272的空间。
在使用这种金属模具成型联接件228的情况下,从大批量生产率的观点出发,优选使用热塑性树脂。更具体地说,诸如POM和PPS的材料是优选的。然而,为了满足诸如强度等要求,可以适当选择其它材料。具体来说,可以使用热固性树脂或金属材料。
如上所述,接合部273在Z方向的一端处具有插入锥部273d,以及在另一端处具有拆卸锥部273e。因此,难以在接合部273沿Z方向的任一端面处设置模具分型面62。这是因为:在使用分为两部分的模具的情况下,如果模具分型面62布置在接合部273的两个端面之一上,则难以从模具中移除成型联接件228。也就是说,在成型了接合部273后从接合部273脱离两个模具时,至少一个模具被接合部273卡住并且不能移动。
因此,当成型本实施例的联接件228时,模具分型面62以如下方式确定。也就是说,在Z方向上,由安装部侧模具61形成从驱动力接收表面273a到基部274径向内侧的区域。此外,通过圆筒侧模具60形成从插入锥形部273d到基部274径向外侧的区域。基于此原因,对准部276必须成形为不与圆筒侧模具60和安装部侧模具61干扰。
具体来说,当沿着Z方向观察联接件228时,对准部276不与驱动移动部273和基部274在其周围约1mm的范围重叠(不重叠)(如图26所示)。
结果,在接合部273和对准部276之间存在间隙,并且在基部274和对准部276之间产生间隙。由于这些间隙,基部274和接合部273可以在联接件228的周向上移动一定程度。在此结构中,期望增加基部274的刚性。这是因为,如果使用不能使基部有足够高刚性的材料而使基部274的刚性较低,则会有以下趋势。
在图29中,作为参考例,示出了一种结构,其中,联接件228的材料改变为刚性低的材料。
图29是不使用实施例4的联接件的情况下通过沿着旋转中心线(旋转轴线)切开来示出基部和接合部变形的纵向剖视图。
在该实施例中,当驱动力接收表面3273a抵接主组件驱动力传递表面101b时,清洁刮板26、充电辊22等向感光鼓单元3230施加负荷。由于这种负荷,如图29中箭头所示当通过接合部3273从主组件驱动轴101接收驱动传递力时,基部3274趋于通过驱动力以根部3274a作为支点在旋转方向上向下游倾转。接合部3273设置在基部3274的自由端侧;因此,当基部3274倾转时,接合部3273也以对应于基部3274的倾转量倾转。结果,驱动力接收表面3273a和主组件驱动力接收表面101a有可能彼此不接触,并且感光鼓单元3230有可能不能朝主组件驱动轴101的被支承部101d侧缩回。
此外,当上述由清洁刮板26、充电辊22等施加的负荷变化时,感光鼓1的旋转量由于基部3274的倾转量变化而变化,并且会不利地影响图像质量。
因此,在实施例2中,选择高刚性材料作为联接件228的材料,以便可以避免参照参考例描述的可能性,并且保持基部274的刚性。
另一方面,在本实施例(实施例4)中,如图30所示,与实施例2不同的是在接合部473和对准部476之间的间隙中,支持部件434的支持部434a插入接合部473在旋转方向上游的间隙。由此,即使基部474的刚性较低,也能够使基部的倾转量较小。
在下文中,参考图30至图38,对本实施例的结构细节进行说明。
图30是从Z方向的外侧观察的根据实施例4的联接件428的图示。
图31是从Z方向的外侧观察的根据实施例4的法兰部件470的图示。
图32是沿着旋转中心线(旋转轴线)截取的根据实施例4的联接件428的纵向剖视图。
图33是从Z方向的内侧观察的根据实施例4的法兰部件470的图示。
图34是从Z方向的外侧观察的根据实施例4的支持部件434的图示。
图35是沿着旋转中心线(旋转轴线)截取的根据实施例4的联接件428和主组件驱动轴101的纵向剖视图。
图36是示出了根据实施例4的将支持部件434组装到法兰部件470的立体图。
图37是沿着垂直于旋转轴线的平面并且在穿过驱动力接收表面(驱动力接收部)473a的位置截取的主组件驱动轴101和根据实施例4的联接件428的剖视图。
图38是沿着旋转中心线(旋转轴线)截取的根据实施例4的另一例的联接件428和主组件驱动轴101的纵向剖视图。
联接件428通过组合两个部分(即法兰部件470和支持部件434)而形成。
在法兰部件470中,设置有圆筒部471、安装部472、基部474、接合部473、对准部476的径向定位部476a、接收表面476c和在安装部472上的钩挂部472b。接收表面476c和接合部473是如后所述用于夹持支持部434a的表面。钩挂部472b具有的形状用于将支持部件434固定到法兰部件470。
接合部473设置有驱动力接收部,用于从成像设备主组件的主组件驱动轴101接收驱动力。接合部473和基部474是用于可动地支撑驱动力接收部的支撑部。
法兰部件470是用于通过设置在接合部473中的驱动力接收部从主组件驱动轴101接收驱动力的驱动力接收部件。
在支持部件434中,设置有支持部434a、抵接部434b和压配合部434c。在接合部473和对准部476之间的间隙中,支持部434a组装到在接合部473旋转方向上游侧的间隙中,并且具有的形状能有效地抑制接合部473和基部274倾转。抵接部434b具有的形状使得当主组件驱动轴101的驱动传递到联接件428时能够抵接主组件驱动轴101自由端处的半球形101c。
压配合部434c成形为使得通过压配合到法兰部件470的安装部472,从而将支持部件434固定到法兰部件470。
(法兰部件的说明)。
将参考图31、图32和图33描述法兰部件470。
如图32所示,法兰部件470的安装部472具有钩挂部472b,该钩挂部具有的形状用于将支持部件434安装到法兰部件470。钩挂部472b具有从安装部472的内周面472h突出的形状,并且如图31所示,多个钩挂部472b配置在法兰部件470的周向上与基部474和接合部473不同的相位处;在本实施例中,在法兰部件470的周向上以等间隔布置在三个位置处(120度间隔,基本上等间隔)。
如图32所示,钩挂部472b在相对于Z1方向的下游侧具有基本上垂直于Z轴的表面,并且在相对于Z2方向的下游侧具有在组装支持部件434时要使用的锥形。
此外,当沿Z方向观察对准部476时,安装部472具有在围绕安装部472大约1mm范围内的孔476d(图31,图32)。
通过设置孔476d并在安装部472周围约1mm设置间隙,可以使用简单的金属模具制造法兰部件470。
如图31和图33所示,对准部476具有接收表面476c。支持部件434的支持部434a由夹持表面473g和接收表面476c夹持,该夹持表面是接合部473的在主组件驱动轴101的轴部101f的径向外侧的部分。夹持表面473g和接收表面476c是基本平行的表面。
此外,如图33所示,对准部476具有大致垂直于接收表面476c的肋476e,其延长线穿过夹持表面473g在轴部101f侧的端部。
(支持部件的说明)
参考图30、图34、图35和图36,将描述支持部件434。
支持部件434具有支持部434a、抵接部434b和压配合部434c。
如图30所示,支持部434a布置成组装在接合部473的每个夹持表面473g与接收表面476c之间的间隙中。厚度设定为与夹持表面473g和接收表面476c之间的间隙大致相同。此外,如图34所示,连接支持部434a在夹持表面473g侧的各脊线的圆设置成使得其中心与压配合部434c相同,其直径D8与径向定位部476a的外径D7大致相同。
以与实施例1的抵接部76b相同的方式,在抵接部434b抵接半球形101c的状态下,主组件驱动轴101的半球形101c的中心101h落在驱动力接收表面473a的范围内(图35)。
压配合部434c压配合到法兰部件470的安装部472的内周圆筒472h中。如图35所示,压配合部434c在Z方向上的厚度设定为与在钩挂部472bZ1方向侧的垂直表面和对准部476之间的间隙大致相同。
具有上述形状的支持部件434从Z2方向朝Z1方向组装到法兰部件470,从而形成联接件428(如图36所示)。
[通过主组件驱动轴驱动联接件]
参考图37,将描述从主组件驱动轴101到联接件428的旋转驱动传递。
当联接件428的驱动力接收表面473a抵接主组件驱动传递表面101b时,清洁刮板26、充电辊22等向感光鼓单元430施加负荷。也就是说,驱动力接收表面473a在接受负荷(驱动力)F1的同时与驱动传递表面101b一体地旋转。
当驱动力接收表面473a接收到该驱动力F1时,驱动力F1传递到与接合部473的驱动力接收表面473a相对的夹持表面473g,如图37所示。接合部473通过支持部434a、接收表面476c和肋476e而由安装部472支撑,因此接合部473基本上不朝旋转方向下游侧变形。结果,驱动力接收表面473a可以稳定地与主组件驱动力接收表面101a接触,并且感光鼓单元430可以被拉向主组件驱动轴101的被支承部101d侧。即使负荷F发生波动,接合部473也如上所述地被支撑,这是因为接合部473基本上不变形;因此,感光鼓1的旋转量基本上不改变,并且可以保持图像质量。
也就是说,支持部434b是用于限制设置在接合部474中的驱动力接收部沿着鼓单元旋转方向(联接件周向)移动的部件。
在本实施例中,接合部473(和设置在接合部473中的驱动力接收部)在Z方向上设置在圆筒部471内部(图35)。也就是说,接合部473位于感光鼓1的Z方向外侧。然而,如图38所示,即使驱动力接收表面473a(接合部473)在Z方向上设置在安装部72的内部,与实施例3类似也是非常好的。此时,与实施例3类似,感光鼓1可以布置成靠近主组件驱动轴101侧。因此,可以有助于盒7和成像设备100在Z方向上的尺寸缩小。或者,可以通过将基部和接合部473的一部分设置在感光鼓1的后侧来保护基部和接合部473。
<实施例5>
参考图39至图57,将描述实施例5。
在该实施例中,可移动地支撑驱动力接收部573a的支撑部(接合部573,基部574)至少在联接件528的周向上延伸。
与上述实施例(特别是实施例2)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件相似点的描述。将主要对与上述元件的不同之处进行描述。
图39是根据实施例5的联接件528的剖视立体图。
图40是沿着垂直于旋转轴线的平面并且在穿过驱动传递部573的位置处截取的根据实施例5的联接件528的剖视图。
图41是沿着垂直于旋转轴线的平面并且在穿过接合部573的位置截取的根据实施例5的联接件528和主组件驱动轴101的剖视图。
图42示出了根据实施例5的用于形成法兰部件570的模具的结构。
图43是根据实施例5的对准部件533的立体图。
图44是从Z方向的外侧观察的根据实施例5的对准部件533的图示。
图45是根据实施例5的联接件528的剖视图。
图46是从Z方向的外侧观察的根据实施例5的法兰部件570的图示。
图47是根据实施例5的联接件528的组装的图示。
图48是从Z方向的内侧观察的根据实施例5的对准部件533的图示。
图49是示出了根据实施例5将联接件528安装到主组件驱动轴101的操作的剖视图。
图50是示出了根据实施例5将联接件528安装到主组件驱动轴101的操作的剖视图。
图51是示出了根据实施例5的从主组件驱动轴101到联接件528的驱动传递的剖视图。
图52是从Z方向的内侧观察的根据实施例5的法兰部件570的图示。
图53是示出了根据实施例5的从主组件驱动轴101到联接件528的驱动传递的剖视图。
图54是实施例5中主组件驱动轴101和联接件528的位置偏离了部件公差的剖视图。
图55是示出了根据实施例5的将联接件528从主组件驱动轴101上拆卸的操作的剖视图。
图56是示出了根据实施例5的联接件528的基部574的卷绕部574b在直径上大于主组件驱动轴101的轴部101f的情况下驱动传递的剖视图。
图57是示出了根据实施例5的联接件528的基部574的卷绕部574b在直径上小于主组件驱动轴101的轴部101f的情况下驱动传递的剖视图。
如图39所示,联接件528包括法兰部件(驱动力接收部件)570和具有倒锥形533a的对准部件(定位部件)533,下面将对细节进行描述。基部574布置成在Z方向上与驱动力接收表面(驱动力接收部)573a重叠。也就是说,当基部574和驱动力接收表面573a投影到鼓单元的轴线上时,它们各自投影区域的至少一部分重叠。
此外,驱动力接收表面(驱动力接收部)573a和基部574的根部574a设置在圆筒部571的内周面571b上。也就是说,在Z方向上,根部574a在感光鼓1的外侧。
另外,如图45所示,基部574的根部574a布置成使得在Z方向上与驱动力接收表面573a的整个区域重叠。
根部574a是基部574的后端(径向外端部),基部574是连接到法兰部件570(内周面571b)的连接部。根部574a是基部574的支撑部。基部574在根部574a上由法兰部件570支撑。
(法兰部件的说明)
如图46所示,多个接合部573和多个基部574对称地设置在法兰部件570上。也就是说,接合部573在法兰部件570的周向上以等间隔布置在三个位置处(120度间隔,基本上等间隔)。类似地,基部574也在法兰部件570的周向上以等间隔布置在三个位置处。
接合部573是至少在联接件528的径向(鼓单元的径向)上朝向内侧突出的突出部(突起部,凸部)。接合部573设置在基部574的自由端并由基部574支撑。
基部574是在联接件528的周向上延伸的延伸部(延展部,延长部)。基部574延伸的方向与接合部573的突出方向相交。更详细地,基部574至少在联接件528(法兰部件570)的周向上延伸。换句话说,基部574至少在鼓单元的旋转方向上延伸。
基部574和接合部573是用于可动地支撑驱动力接收部573a的支撑部。基部574具有弹性变形以使驱动力接收部573a移动的变形部(变形部,挠性部)。基部574配置成以其固定端为支点而变形。
接合部573配置成与主组件驱动轴101接合。接合部573设置有能够接收用于旋转感光鼓1的驱动力(旋转力)的驱动力接收表面(驱动力接收部)573a。
沿径向测量的接合部573的突出量(从基部574的表面突出的距离)为1.2mm。为了与主组件驱动轴101的驱动传递凹槽接合,接合部573的突出量沿径向测量优选为0.6mm以上,更优选为1.0mm以上。更优选地,如本实施例那样,沿径向测量的突出量优选为1.2mm以上。
对于接合部573的整个突出部与主驱动传递凹槽接合的结构,基部驱动力接收部573a的退回量需要超过接合部573的突出量。因此,在本实施例中,驱动力接收部573a能够沿径向移动至少1.2mm。
此外,驱动力接收部573a的优选移动量对应于接合部573的优选突出量。也就是说,沿径向测量的驱动力接收部573a的移动量优选为0.6mm以上,更优选为1.0mm以上,进一步优选为1.2mm以上。
接合部573和基部574是可移动地支撑驱动力接收表面573a的支撑部。基部574是弹性变形部(弹性变形部,挠性部),并且基部574变形使得驱动力接收表面573a移动。
驱动力接收表面573a是鼓单元的外部部分(处理盒的外部部分),也就是说从设备主组件传递驱动力(旋转力)的驱动传递部(驱动力传递部)。
基部574沿与接合部573的突出方向不同的方向(与突出方向交叉的方向)延伸。也就是说,基部574至少在法兰部件570的周向(旋转方向)上延伸。更具体地,基部574从法兰部件570朝向旋转方向下游侧延伸。基部574的自由端是旋转方向下游侧的端部。基部574的后端(根部574a)是旋转方向的上游端部。此外,基部574的自由端设置在后端的径向内侧。也就是说,基部574的自由端是径向内侧的端部,基部的后端(根部574a)是径向外侧的端部。
接合部573设置在基部574的下游侧(自由端侧)。基部574的上游侧端部(后端)是与法兰部件570连接的连接部。基部574的后端是由法兰部件570支撑的被支撑部,并且是基部574的根部574a。
基部574的延伸方向基本上垂直于法兰部件570(鼓单元)的旋转轴线。也就是说,连接基部754的前端和后端的连线与旋转轴线形成大致为90度的角度。换句话说,基部574的前端和后端都位于与法兰部件570的旋转轴线平行的同一截面上。
如图50所示,在垂直于法兰部件570轴线的相同横截面上,布置了三个基部574每一个从自由端到后端的部分。三个接合部573和三个根部574a都布置在相同的横截面上。换句话说,多个接合部573和多个基部574相对于Z方向基本上位于相同位置。
如图40的部分(a)所示,基部574具有根部574a、卷绕部574b以及笔直部574c,该笔直部把根部574a和卷绕部574b直线地连接起来。根部574a是法兰部件570的内径部(内表面,内周部)和基部574连接的部分(连接部)。笔直部574c是基本上笔直的形状(基本上平板形)部。卷绕部574b是要卷绕在主组件驱动轴101上的部分。也就是说,当法兰部件570通过接合部573从主组件驱动轴101接收驱动力(旋转力)时,卷绕部574b围绕主组件驱动轴101卷绕并接触主组件驱动轴101。卷绕部574b具有曲面(弧形表面)。卷绕部574b弯曲成顺应主组件驱动轴101。换句话说,卷绕部574b沿联接件528的周向(旋转方向)弯曲。换句话说,卷绕部574b具有径向向内(联接件的轴线侧)的曲面,并且是径向向外凹的曲面。
此外,卷绕部574b设置在设置有驱动力接收表面573a的一侧。驱动力接收表面573a和卷绕部574b形成锐角。
如上所述,接合部573设置在基部574的自由端处。也就是说,基部574是支撑接合部573的部分。类似于上述实施例,基部574变形,使得接合部573能够在法兰部件570的径向上移动。
形成基部574和接合部573的树脂材料与形成法兰部件570的树脂一体地成型。然而,本发明不限于此结构。例如,接合部573可以由与基部574的部件不同的部件制成,并且可以粘附到基部574的自由端。类似地,基部574可以由与法兰部件570的其它部分不同的材料形成,或者基部574可以从法兰部件570拆卸。
为了增加基部574的强度,可以在形成基部574的树脂材料内部设置金属。在图50等中,在树脂内设置板状金属。下面将就另一个实施例来描述此种结构(图65等)。
沿Z方向测量的基部574的宽度等于或大于沿Z方向测量的驱动力接收表面573a的宽度。
从法兰部件570的旋转中心(旋转轴线)到卷绕部574b的表面画出的垂直线的长度基本上等于或大于主组件驱动轴101的轴部101f的半径,稍后将描述效果。换句话说,当法兰部件570投影在与法兰部件570的旋转轴线垂直的平面上时,在该平面(投影平面)上形成卷绕部574b内径的弧的半径R1基本上等于或大于轴部101f的半径R2。
如图40的部分(a)所示,笔直部574c具有沿卷绕部574b的内径的切线方向延伸的形状。换句话说,笔直部574c是与卷绕部574b的弧端一体的平板形,并且在根部574a处连接到法兰部件570的内径部。卷绕部574b的端部处的切线基本上平行于笔直部574c。
这里,如图40的部分(c)所示,在法兰部件570的径向上,从驱动力接收表面573a的内径端573b到卷绕部574b的内径的距离为H1。
在法兰部件570的径向上,从接合部573的外形到圆筒部571的内径的距离为H2。在这种情况下,接合部573和基部574配置成满足H1≦H2的关系。通过采用此种结构(形状),可以得到以下效果。
即使当接合部573使驱动力接收表面573a的内径端573b沿径向H1向外移动时,也可以抑制驱动力接收表面573与圆筒部571的内周面571b之间的干扰。在将联接件528安装到主组件驱动轴的过程中,当接合部573与主组件驱动轴101接触时,接合部573可以可靠地在径向上向外缩回。
如上所述,从法兰部件570的旋转中心到卷绕部574b的表面画出的垂直线的长度基本上等于主组件驱动轴101的轴部101f的半径。因此,驱动力接收表面573a的内径端573b可以朝轴部101f的径向外侧移动,而不会在接合部573的外形和安装部572之间产生干扰。
如图41所示,卷绕部574b在驱动力接收表面573a侧沿径向测量的厚度定义为自由端侧厚度(驱动力接收表面侧的厚度)574k,以及笔直部574c的厚度定义为笔直部厚度574l(后侧厚度)。可以通过形成各部分的形状使得满足自由端侧厚度574k≧笔直部厚度574l的关系,从而提供以下效果。
如图41所示,当驱动力接收表面573a从主组件驱动力传递表面101b接收到旋转力F1时,接合部573接收趋于以接合部573和基部574之间连接部作为支点而径向向外变形的力矩M。通过增加支撑用作变形支点的外端573c的自由端侧厚度574k来抵抗变形,能够减小通过该力矩M导致的接合部573的变形。另一方面,如果在笔直部的范围增加厚度574l,则将联接件528安装到主组件驱动轴101时所需的负荷增加。换句话说,使基部574在径向上朝向外侧缩回所需的负荷变大,因此用户难以安装盒。
因此,通过选择前端侧厚度574k≧笔直部厚度574l的关系,可以优选地实现接合部573的变形减小和盒的安装容易性。
此外,在图41中,接合部573能够在联接件528的径向(感光鼓单元30的径向)上向外缩回。设置在接合部573中的驱动力接收表面573a相对于接合部573的移动方向是倾斜的。在图41的剖视图中,直线B3是沿着接合部573缩回移动方向延伸的线。直线B4是沿着驱动力接收表面573a的线。应当理解,直线B3和直线B4彼此交叉。由此,在驱动力接收表面573a与驱动传递凹槽101a接触的状态下,驱动力接收表面573a咬入驱动传递凹槽101a中,使得接合部573不容易从驱动传递凹槽101a退出。也就是说,接合部573和驱动传递凹槽101a之间的接合得以稳定。
特别地,驱动力接收表面573a相对于接合部573的移动方向(线B3)倾斜,使得内径侧(自由端侧)相对于联接件528的旋转方向是在外径侧(根侧)的上游。因此,当联接件528(感光鼓单元30)旋转时,从驱动力接收表面573接收的力是在使接合部573与主组件驱动传递凹槽101a接合的方向上。接合部573与主组件驱动传递凹槽101a之间的接合状态得以稳定,从而抑制了接合部573与主组件驱动传递凹槽101a之间的脱离。
图40的部分(a)是从Z方向上观察的法兰部件570的图示。如图40的部分(a)所示,沿着Z方向观察,相对于从驱动力接收表面573a的内径端573b在垂直于驱动力接收表面的方向上画出的直线,根部574a设置在法兰部件570的上游(沿旋转方向)。
此外,沿着Z方向观察,在由笔直部574c和圆筒部571的内周面571b形成的脊线中,在驱动力接收表面573a侧的脊线称为内脊线574d,并且在驱动力接收表面573a的相反侧的脊线称为外脊线574e。如图40的部分(b)所示,内脊线574d以比外脊线574e大的弧连接到圆筒部571的内周面571b。
这是因为:优选的是,基部574和圆筒部571的内周面571b彼此连接处的连接表面应尽可能地大。这是因为:当驱动力接收表面573a接收到驱动力时,可以分散施加到圆筒部571的内周面571b(根部574a与其连接)上的力,因此可以抑制圆筒部571的变形。结果,即使由感光鼓单元30接收到的负荷发生变化,圆筒部571的变形量也较小,从而可以将变形对感光鼓单元30旋转的影响抑制到小的程度。期望的是使基部574和圆筒部571之间的连接表面尽可能地大。
如图40的部分(b)所示,如在Z方向观察的,在安装部572内径处各切线之中穿过根部574a的线与笔直部574a所成角度中,在外脊线574e侧形成的角度I是锐角。
基部574弹性变形的支点574f位于由笔直部574c和圆筒部571形成的脊线的弧的影响消失的部分附近。也就是说,当内脊线574d和外脊线574e是相同尺寸的弧时,角度I是锐角。因此,是在笔直部574c的中心线与从外脊线574e内径侧脊线端部垂直于笔直部574c的中心线画出的直线二者的交点附近。
如果外脊线574e侧的脊线平缓,则在弧扩大时弹性变形支点574f的位置移到点574f',因为角度I是在外脊线574e侧的锐角。这样,基部574的弹性变形长度缩短,并且联接件528到主组件驱动轴101的安装性劣化。
从支点574f垂直于笔直部574c的直线与笔直部574c的内侧之间的交叉点称为交叉点574m。即使内脊线574d的弧大到足以穿过交点574m,由笔直部574c和安装部572形成的脊线的弧的影响所延及的范围也保持不变。也就是说,即使内脊线574d的脊线弧增加但弧不穿过交点574m,也可以确保基部574和圆筒部571彼此连接处的大连接表面,但不会劣化联接件528到主组件驱动轴101的安装性。
(制造方法说明)
参考图42,将描述用于形成法兰部件570的模具的结构。
图42是示出了在金属模具中成型法兰部件570的状态的剖视图。
法兰部件570具有的形状是使得凸缘部575在径向上向外突出。在成型这种形状的情况下,优选使用如图42所示的金属模具。
具体地,如图所示,金属模具具有两件式结构,包括左模具(圆筒侧模具560)和右模具(安装部侧模具561)。通过对准左右模具,形成了具有与成型产品相同形状的空间部(模具腔,中空部)。通过将材料注入空间部并将其在模具中固化而形成法兰部件570。模具具有这样的结构,其中,在形成凸缘部575的空间附近设置有模具分型面562(模具沿其分开的平面,两个半模在该处接触的平面),该模具分型面是用于右模具和左模具配合的部分。圆筒侧模具560具有的形状包括用于成型圆筒部571外周的空间。类似地,安装部侧模具561的形状具有用于成型安装部572的空间。
在使用这种金属模具成型联接件570的情况下,从大批量生产率的观点出发,优选使用热塑性树脂。更具体地说,诸如POM和PPS的材料是优选的。然而,为了满足强度等要求,可以适当选择其它材料。具体来说,可以使用热固性树脂或金属材料。
类似于实施例1,接合部573在Z方向的一端处具有安装锥部573d,以及在另一端处具有拆卸锥部573e。因此,难以将模具分型面562配置在接合部573相对于Z方向的任一端面上。
这是因为:当使用两部分模具时,如果模具的模具分型面562在接合部573的端面上,则难以将成型的法兰部件570从模具中取出。也就是说,两个模具中的任一个不能相对于法兰部件570移动。
类似地,驱动力接收表面573a具有这样的形状,其中,在感光鼓单元30的外侧(在Z1方向的下游侧)相对于内侧(在Z2方向的下游侧)朝向旋转方向上游侧扭转。因此,用于形成驱动力接收表面573a的形状部设置在安装部侧模具561侧。这是因为:如果驱动力接收表面573a由左侧(圆筒侧模具560)形成,则圆筒侧金属模具560不能从驱动力接收表面573a脱除。
如果模具分型面562尽可能的笔直,则制造模具更为容易,因为这样就可以高精度制造模具分型面562。因此,如果模具分型面562形成为尽可能的笔直,则可以降低出现树脂泄漏等的可能性。
为了使接合部573的模具分型面562笔直,需要将驱动力接收表面573a布置在感光鼓单元30后侧至少超过插入锥部573d。因此,在本实施例中,插入锥部573d的端部和驱动力接收表面573a的端部在Z方向上布置在相同的位置处。
在本实施例中,法兰部件570的根部574a所设置的部分的内径与其它部分的内径基本相同。具体来说,根部574a所设置的部分的内径与圆筒部内周面571b的内径基本相同。此外,安装部572的内周面的内径和根部574a所设置的部分的内径基本相同。
此外,当沿着Z方向观察法兰部件570时,如果在与基部574重叠的部分上设置另一形状(突起等),则当使用金属模具成型法兰部件570时,该另一形状和基部574彼此连接。当该另一形状连接到基部574时,基部574的弹性变形受到阻碍。
因此,在本实施例的法兰部件中,在将法兰部件570投影到与旋转轴线(Z方向)垂直的投影平面上法兰部件570不具有与基部574重叠(重叠)的部分。同样,与驱动力接收部573也不重叠。
(对准部件的说明)
参考图43至图44,将描述对准部件(定位部件)533的结构。
在实施例1中,主组件驱动轴101和联接件28之间的对准由径向定位部76a实现,在Z方向上的定位由抵接部76b实现(如图14和图15所示)。径向定位部76a设置在与接合部73在Z方向上重叠的位置处。也就是说,当径向定位部76a和接合部573投影在联接件28的旋转轴线上时,它们布置成使得它们的投影区域的至少一部分在旋转轴线上彼此重叠。
另一方面,在本实施例中,基部574布置成与驱动力接收表面573a在Z方向上重叠。也就是说,基部574和接合部573设置成使得当投影在联接件528的旋转轴线上时它们重叠。当基部574和接合部573这样布置时,难以如实施例1那样将径向定位部设置成在Z轴方向上与接合部573重叠。
因此,在本实施例中,代替如实施例1中公开的径向定位部76a的结构,采用上述具有倒锥形533a的对准部件(定位部件)533。利用对准部件533来使联接件528相对于主组件驱动轴101定位。倒锥形533a由大致圆锥形的凹部提供。下面将描述对准部件533的详细形状。
如图43和图44所示,对准部件533包括倒锥形部533a、装配部533b、锁止部533c和用于匹配法兰部件570相位的凸部533d。装配部533b装配到法兰部件570中。锁止部533c具有抑制对准部件533从法兰部件570脱离的功能。
如图45所示,倒锥形部533a设置在感光鼓单元30内侧(Z2方向侧)超过接合部573。沿Z方向观察法兰部件570和对准部件533,法兰部件570和对准部件533组装成使得倒锥形部533a的中心和感光鼓1的中心对准。
倒锥形533a具有抵接部533e,当感光鼓1旋转时,抵接部533e抵接在主组件驱动轴101自由端处的半球形101c。如图45所示,对准部件533安装在法兰部件570上,使得在抵接部533e和半球形部101c在Z方向上彼此接触的状态下,主组件驱动轴101的半球形部101c的中心101h在驱动力接收表面573a的范围内。
如图45所示,装配部533b相对于抵接部533e设置在感光鼓单元30的内侧(Z2方向侧)。
此外,法兰部件570在与装配部533b相对应的位置具有被装配部572a。如上所述,可以高精度对准倒锥形533a的中心和感光鼓1的中心。
如图43所示,锁止部533c具有卡扣配合形式,并且具有用于抑制对准部件533从法兰部件570脱离的形状。也就是说,锁止部533c是连接部,其将对准部件533连接到法兰部件570。
如图45所示,当对准部件533安装到法兰部件570时,锁止部533c相对于接合部573(驱动力接收部573a)位于感光鼓单元30的内侧(Z2方向侧)。因此,即使法兰部件570的基部574径向向外变形,锁止部533c也能够不妨碍基部574在径向上的变形(移动)。也就是说,当沿径向移动时,接合部573不与锁止部533c接触。
此外,如图45和图46所示,法兰部件570具有对应于锁止部533c的钩挂部572b。如图46所示,钩挂部572b设置的位置使得从Z方向观察时不与基部574重叠。
钩挂部572b设置在沿周向彼此相邻布置的两个根部574的大致中间。然后,可以在周向上确保基部574和钩挂部572b之间的间隙。在本实施例中,与锁止部533c接合的三个钩挂部572b设置在根部574a的中间。
如图43和图47所示,用作组装引导件的凸部533d具有从装配部533b径向向外突出的形状。因此,当对准部件533安装到法兰部件570时,锁止部533c和钩挂部572b的相位可以容易地匹配。凹部533d是用于确定对准部件533相对于法兰部件570的相位(在旋转方向上的姿态,在旋转方向上的位置)的相位确定部。
如图47所示,切除部572c设置在与夹紧凹槽572e在周向上隔开90度的位置处。与实施例1相同,两个夹紧凹槽572e围绕联接件528的旋转轴线等距设置。也就是说,切除部572c布置在两个夹紧凹槽572e之间最远离的位置处,夹紧凹槽布置在法兰部件570周向上分开180度的位置处。由此,可以抑制夹紧凹槽572e和切除部572c对法兰部件570的刚性的影响。
此外,如图48所示,对准部件533具有形成装配部533b的外圆筒形肋533f和在倒锥形533a外端后侧的内圆筒形肋533g。此外,对准部件533包括多个径向肋533i,以便连接外圆筒形肋533f和内圆筒形肋533g。在内圆筒形肋533g内侧不设置肋。
通过用径向肋533i将外圆筒形肋533f和内圆筒形肋533g连接起来,当对准部件533压配合到法兰部件570中时,可以抑制对准部件533的变形。此外,通过将肋设置在内圆筒部533g的内侧,可以抑制倒锥形533a的中心部厚度增加。由此,可以提高影响对准功能的倒锥形533a的尺寸精度。
[联接件和主组件驱动轴的接合过程]
将详细描述联接件528与主组件驱动轴101的接合过程。
图49是示出将联接件安装到主组件驱动轴的操作的纵向剖视图。图49的部分(a)是联接件28已经开始与主组件驱动轴101接合的状态的图示。图49的部分(e)示出了这样的状态,其中,盒7已经安装到成像设备主组件100A,盒门104已经关闭,下部前侧盒引导件109已经升起,并且盒7已经相对于成像设备主组件100A定位。图49的部分(a)和图49的部分(e)之间的图49的部分(b)至图49的部分(d)是将联接件528连接到主组件驱动轴101的过程的图示。如在实施例1中那样,主组件驱动轴101由于其自重以小角度沿重力方向向下悬垂。
此外,图50是主组件驱动传递凹槽101a的相位和接合部573(驱动力接收表面573a)的相位彼此未对准的状态的图示。换句话说,在图50中,接合部573(驱动力接收表面573a)未进入主组件驱动传递凹槽101a,并且图50示出了它们不彼此接合的状态。
类似于实施例1,如图49的部分(a)所示,相对于当盒7相对于成像设备主组件100A定位时的状态(如图49的部分(e)所示),联接件528以大约
首先,如图49的(b)所示,法兰部件570的圆筒部571的内周面571b的自由端抵接主组件驱动轴101的粗略引导部101g。如图所示,主组件驱动轴101配置成以悬臂的方式由支承部101d支撑。因此,在主组件驱动轴101的粗略引导部101g与联接件570的内周面571b相配合的状态下,将联接件7插入主组件驱动轴101上。类似于实施例1,在Z方向上,接合部573的驱动力接收表面573具有长度L2,其满足L1>L2,其中,L1是从圆筒部571的前端面到接合部573的前端面的距离(如图45所示)。因此,在主组件驱动轴101的自由端处的半球形101c碰撞接合部573之前,主组件驱动轴101的粗略引导部101g沿联接件570的内周面571b而行。
由此,主组件驱动轴101由联接件528引导。因此,防止了主组件驱动轴101的自由端处的半球形部101c碰撞接合部573或基部574的非预期部分,以免对接合部573和/或基部574有冲击影响。也就是说,可以保护接合部573和基部574。
如图49的部分(c)所示,当联接件528进一步朝向主组件驱动轴101的后侧插入时,接合部573的插入锥形表面573d和主组件驱动轴101的自由端处的半球形101c彼此抵接。由于插入锥形表面573d的倾斜表面和半球形101c的球形,主组件驱动轴101基本上引导到三个接合部573的中心。
当联接件528进一步插入到主组件驱动轴101上时,基部574径向向外弹性变形,使得接合部573沿半球形101c而行。结果,如图50所示,接合部573移动(缩回)到主组件驱动轴101的轴部101f的外径表面。通过此运动,如图49的部分(d)所示,联接件528安装到主组件驱动轴101,直到接合部573的拆卸锥形表面573e在Z方向上比主组件驱动轴101的主组件侧拆卸锥部101i更深。
之后,与实施例1类似,盒7抬起,使得盒7的鼓单元轴承部件39L抵接前侧盒定位部110。通过如此抬起盒7,盒7相对于成像设备主组件100A定位(如图21的部分(d)所示)。通过盒7的此种操作消除了联接件528的倾斜,如图49的部分(e)所示。也就是说,联接件528和鼓单元处于能够成像的姿态。
如图50的部分(b)所示,当主组件驱动轴101旋转时,主组件驱动传递凹槽101a和接合部573变成具有相同的相位。结果,消除了基部574的弹性变形,接合部573的一部分进入主组件驱动传递凹槽101a,并且联接件528和主组件驱动轴101彼此接合。
当主组件驱动传递凹槽101a和接合部573的相位彼此对准时,基部574的至少一部分弹性变形在图49的部分(d)的阶段消除,并且变成图50的部分(b)的状态。也就是说,当从图50的部分(a)所示的状态移到图50的部分(b)所示的状态时,基部574变形以便使得接合部573沿径向向内移动。严格地说,至少部分地恢复了已经沿径向向外变形的基部574的状态,由此,接合部573至少沿径向向内移动。
以此方式,基部574使接合部573进入到主组件驱动传递凹槽101a中,并且使接合部573与主组件驱动轴101的主组件驱动传递凹槽101a接合。
[通过主组件驱动轴驱动联接件]
参考图51至图57,将描述从主组件驱动轴101到联接件528的旋转驱动传递。
如上所述,在关闭了安装有盒7的成像设备主组件100A的盒门104之后,主组件驱动轴101旋转。结果,接合部573的相位和主组件驱动传递凹槽101a的相位彼此匹配,结果是图50的部分(b)所示的状态。主组件驱动轴101配置成能够沿用于成像操作的旋转方向旋转以及也能沿相反方向旋转。
如图50的部分(b)所示,当主组件驱动轴101进一步沿逆时针方向旋转时,如图51所示,主组件驱动传递表面101b抵接驱动力接收表面573a。结果,主组件驱动轴101的旋转驱动力通过联接件528传递到感光鼓1。
如在实施例1中那样,驱动力接收表面573a围绕法兰部件570的旋转轴线的中心扭转。扭转方向是使得驱动力接收表面573a的在感光鼓单元30的外侧(Z1方向侧)相对于内侧(在Z2方向的下游侧)位于感光鼓1旋转方向的上游(如图52所示)。
只要与驱动轴接触的两个点在旋转方向上的相位是不同的就可以,并且只要能提供与扭转表面相同的功能则可以是任何结构。例如,只要形状是使得驱动力接收表面573a的外侧(Z1方向的下游侧)相对于内侧(Z2方向的下游侧)是在感光鼓1旋转方向的上游侧就可以。换句话说,沿着接合部573的圆筒轴线方向连接圆筒内端部和圆筒外端部的连线与圆筒的旋转轴线交叉。
通过采用此形状,当驱动力接收表面573a被驱动时,产生沿着将感光鼓单元30朝向主组件驱动轴101的支承部101d侧拉的方向的力。
由于该力(在Z1方向上的力),使对准部件533的倒锥形533a处于与在主组件驱动轴101自由端处的半球形101c可靠抵接的状态。当倒锥形533a接触半球形101c时,确定了联接件相对于主组件驱动轴101的径向位置。此外,也确定了联接件528在纵向上相对于主组件驱动轴101的位置。也就是说,倒锥形533a是用于确定联接件528(鼓单元)相对于主组件驱动轴101的径向位置的径向定位部(对准部)。此外,倒锥形533a也是用于确定联接件528(鼓单元)在纵向上相对于主组件驱动轴101的位置的纵向定位部(轴向定位部)。
径向定位部和纵向定位部不是必须是诸如倒锥形凹部533a的圆锥形凹部。径向定位部和纵向定位部的形状不受限制,只要当接触主组件驱动轴101的自由端(半球形101c)时可以确定感光鼓单元30相对于主组件驱动轴101的位置即可。例如,优选地,它们朝向底部凹缩。作为此形状,可以使用诸如棱锥形(方棱锥形等)的非圆锥形。然而,如果凹部是相对于联接件528的轴线对称的圆锥形,如本实施例的倒锥形533a的情况一样,则可以特别高精度保持联接件528的位置。
由于倒锥形533a仅需具有与主组件驱动轴101接触的区域,所以非接触区域可以具有任何形状。例如,与主组件驱动轴101不接触的倒锥形533a可以是具有开口底部的凹部。
当沿着Z方向观察法兰部件570时,相对于法兰部件570的旋转方向,根部574a设置在从驱动力接收表面573a的内径端573b沿垂直于驱动力接收表面573a的方向上所画出直线的上游(图40的部分(a))。由此,可以提供以下效果。
如图51所示,驱动力F1分解为在平行于连接驱动力接收表面的内径端573b和基部574的根部574a的连线的方向上的分力Fh,和在垂直方向上的分力Fv。垂直方向上的分力Fv是将接合部573和基部574朝向轴部101f侧拉的分力。也就是说,由于分力Fv,在基部574处产生用于以根部574a为支点逆时针旋转基部574的力矩。结果,接合部573和基部574被拉到轴部101f中。
在图51中,当垂直于驱动力接收表面573a的法线从驱动力接收表面573a的自由端延伸时,基部574延伸以与法线交叉。也就是说,基部574的固定端沿联接件的旋转方向设置在法线的上游侧。通过这样的配置关系,优选地生成使基部574围绕主组件驱动轴101的轴部101f卷绕的力矩。
由于主组件驱动轴101旋转,所以当基部574受拉时,卷绕部574b围绕轴部101f卷绕。结果,基部574和轴部101f之间的接触面积比基部574未卷绕时的接触面积(如图50的部分(b)所示)大。
作为将卷绕部574b围绕轴部101f卷绕的结果,如图53所示,基部574在笔直部574c处接收由驱动力F1产生的旋转力Fc。由于旋转力Fc是在与笔直部574c垂直的方向上的分力,所以是在笔直部574c强刚性方向上的分力。结果,可以将基部574的变形量抑制得较小。通过这样做,即使感光鼓单元30上的负荷发生变化,基部574的变形量也小,从而可以将变形对感光鼓单元30旋转的影响抑制到小的程度。
通过使形成卷绕部574b内径的弧的半径R1基本上等于或大于轴部101f的半径R2的结构,可以得到以下效果。
如上所述,当驱动力接收表面573a由主组件驱动传递表面101b驱动时,基部574被拉入主组件驱动轴101的轴部101f。结果,卷绕部574b围绕轴部101f卷绕。通过卷绕部574b的卷绕,主组件驱动轴101的旋转力由笔直部574c接收。
首先,如图56的部分(a)所示,考虑卷绕部574b的半径R1大于轴部101f的半径R2的情况。在这种情况下,当接合部573与主组件驱动传递凹槽101a相位对准并进入主组件驱动传递凹槽101a时,在卷绕部573b和轴部101f之间产生间隙。
之后,当驱动力接收表面573a与主组件驱动传递表面101b接触并接收旋转力时,如图56的部分(b)所示,提供了以基部574的根部574a作为支点的拉力,使得卷绕部574b围绕轴部101f卷绕。通过该卷绕,笔直部74c可以以与当卷绕部574b的半径与轴部101f的半径相同时大致相同的方式接收旋转力。
另一方面,参考图57,将描述卷绕部574b的半径R1小于轴部101f的半径R2的情况。如图57的部分(a)所示,当接合部573与主组件驱动传递凹槽101a相位对准时,基部574偏转到笔直部574c在接触点574n处抵接轴部101f的位置。在这种情况下存在间隙,该间隙朝向卷绕部574b和轴部101f之间的接合部573侧变得更大。之后,当驱动力接收表面573a抵接主组件驱动传递表面101b并接收旋转力时,卷绕部574b以接触点574n为支点被拉动。然而,从接触点574n到驱动力接收表面573a的距离比从根部574a到驱动力接收表面573a的距离更近。因此,与卷绕部574b的半径大于轴部101f的半径的情况相比,用于使卷绕部574b围绕轴部101f卷绕所需的驱动力F1增大。
基于此原因,卷绕部574b的半径R1优选地基本上等于或大于轴部101f的半径R2。更优选地,这样就可以以较小的驱动力F1将卷绕部574b围绕轴部101f卷绕。
如上所述,对准部件533的倒锥形533a设置成使得半球形101c的中心101h在Z方向上处于法兰部件570的驱动力接收表面573a的范围内(图45)。当接合部573和中心101h投影到鼓单元的轴线上时,中心101h位于接合部573的投影区域的内部。在图45中,接合部573的投影区域由L2表示,可以理解中心101h位于L2所表示的区域内。通过建立此种配置关系,可以提供以下效果。
鼓单元轴承部件39R和鼓单元轴承部件39L分别抵接后侧盒定位部108和前侧盒定位部110。因此,确定了盒7相对于成像设备主组件100A的位置。这里,主组件驱动轴101和联接件28之间的相对位置受部件公差的影响。具体地说,由于从鼓单元轴承部件39R到联接件28的部件公差以及从后侧盒定位部108到主组件驱动轴101的部件公差,位置发生偏移。
如图54所示,半球形101c抵接倒锥形533a,使得在支承部101d处和半球形部101c处都建立了支撑。也就是说,从联接件528观察,主组件驱动轴101围绕半球形101c的中心101h倾转。与Z轴向上的中心101h相同的位置是受该倾转影响最小的位置。驱动力接收表面573a设置在与Z轴方向上的中心101h相同的位置,由此可以最小化位置偏移的影响。也就是说,它是可以稳定地驱动感光鼓1的位置。
[从主组件驱动轴移除联接件]
参考图55,将描述联接件528从主组件驱动轴101拆卸的操作。
如图55的部分(a)所示,当主组件驱动轴101的旋转驱动停止时,驱动力接收表面573a和主组件驱动传递表面101b彼此接触。在该状态下,接合部573的一部分在主组件驱动传递凹槽101a中。
当盒门104打开时,下部前侧盒引导件109下降,并且鼓单元轴承部件39L与成像设备主组件100A的前侧盒定位部110分开。此时,如图55的部分(b)所示,联接件528和主组件驱动轴101相对于安装完成状态时的角度(Z方向)倾斜约
如图55的部分(c)所示,当盒7开始从成像设备主组件100A移除时,接合部573的拆卸锥形表面573e抵接主组件侧拆卸锥部101i。当拆卸锥形表面573e抵接主组件侧拆卸锥部101i时,基部574开始弹性变形并使接合部573沿着主组件侧拆卸锥部101i径向向外移动。
此外,当联接件528从主组件驱动轴101拉出时,状态变得与图50的部分(a)相同,其中,基部574进一步弹性变形,并且接合部573朝轴部101f的外径表面移动。通过将接合部573移动到轴部101f的外径表面,联接件528可以从主组件驱动轴101移除,如图55的部分(d)所示。
此外,如图55的部分(e)所示,当联接件528从主组件驱动轴101移除时,基部574的弹性变形解除,并且接合部573的位置返回到弹性变形前的位置。
通过上述操作,联接件528可以从主组件驱动轴101移除。
通过使用如上所述本实施例的联接件528,可以在接收驱动力F1时减小驱动传递部573和基部574的变形。结果,即使由感光鼓单元30接收到的负荷发生变化,也可以将对感光鼓单元30旋转的影响抑制到小的程度。
在该实施例中,联接件528、法兰部件570和对准部件533组合。然而,根据材料和成型方法的选择,不是必须具有两个部件,也可以是一体件,或通过组合三个以上部件来构成。
<实施例6>
参考图58至图75,将描述实施例6。
在实施例6中,驱动力接收部673a及其支撑部(基部674和接合部673)设置在感光鼓的内部。在本实施例中,如实施例5那样,支撑部至少在联接件628的周向上延伸。
与上述实施例(特别是实施例5)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件相似点的描述。将主要对与上述元件的不同之处进行描述。
图58是根据实施例6的联接件628的剖视图。
图59是实施例6中的法兰部件670的剖视图。
图60是从Z方向的外侧观察的根据实施例6的法兰部件670的视图。
图61是示出了根据实施例6的清洁单元各部分在Z方向上布置关系的剖视图。
图62是示出了根据实施例6的法兰部件670的模具结构的剖视图。
图63是根据实施例6的对准部件633的立体图。
图64是示出了根据实施例6将联接件628安装到主组件驱动轴101的操作的剖视图。
图65是示出了根据实施例6将联接件628安装到主组件驱动轴101的操作的剖视图。
图66是从Z方向的内侧观察的根据实施例6的法兰部件670的视图。
图67是示出了根据实施例6的从主组件驱动轴到联接件的驱动传递的剖视图。
图68是示出了根据实施例6的将联接件628从主组件驱动轴101上移除的操作的剖视图。
图69是示出了在使用大蠕变变形材料制造法兰部件的情况下,在接合部和主组件驱动传递凹槽的相位不对准状态下长期存放后,从主组件驱动轴101到联接件3628的驱动传递是不稳定的状态的剖视图。
图70是示出了根据实施例6的用于将金属板635嵌入到法兰部件670中的金属模具结构的剖视图。
图71是从Z方向的外侧观察的根据实施例6的法兰部件670的视图。
图72是实施例6中的法兰部件670的剖视图。
图73是根据实施例6的法兰部件670的剖视立体图。
图74是根据实施例6的从平直部切除部674g切开的法兰部件670的局部剖视图。
图75是根据实施例6的法兰部件670沿着卷绕部切除部674h截取的局部剖视图。
在实施例5中,驱动力接收表面573a和基部574的根部574a在Z方向上设置在圆筒部571的内周面571b上。在本实施例中,如图59所示,驱动力接收表面673a和根部674a在Z方向上布置在安装部672的内圆周672h上(感光鼓1内部)。也就是说,当联接件628组装到感光鼓1时,驱动力接收表面673a和根部674a布置在与感光鼓1抵接的凸缘部675的端面675b的背侧(Z2方向侧)。
[联接件的结构]
与实施例5一样,通过组合法兰部件670和对准部件633(图58所示),由两个部件构成联接件628。然而,根据材料和成型方法的选择,不是必须具有两个部件,也可以是一体件,或通过组合三个以上部件来构成。
与前述各实施例类似,该实施例的联接件628包括用于从外部(主组件驱动轴101)接收驱动力的驱动力接收表面(驱动力接收部)673a。驱动力接收部设置在突出部(接合部673)上,并且接合部673由基部674支撑。
接合部673和基部674是用于支撑驱动力接收表面673a的支撑部。基部674是在联接件628的周向上延伸的延伸部(延展部,延长部)。接合部673设置在基部674的自由端处。
在该实施例中,在支撑部(基部674和接合部673)和感光鼓1投影到联接件628的轴线上时,支撑部的整个投影区域处于感光鼓1的投影区域中。将进行描述。
(法兰部件的说明)
如实施例5那样,接合部673在法兰部件670的周向上以等间隔布置在三个位置处(120度间隔,基本上等间隔)。类似地,基部674也在法兰部件的周向上以等间隔布置在三个位置处(如图60所示)。
类似于实施例5,基部674包括根部674a、卷绕部674b以及笔直部674c,该笔直部把根部674a和卷绕部674b直线连接起来。
如上所述,当联接件628组装到感光鼓1时,驱动力接收表面673a和根部674a布置在与感光鼓1抵接的凸缘部675的端面675b的背侧(Z2方向侧)(如图59所示)。然而,包括插入锥形表面673d的接合部673的一部分可以从感光鼓1所抵接的凸缘部75的端面675b向前(Z1方向)突出。
参考图61,将描述清洁单元613的其它构件和驱动力接收表面673a的布置。图61是示出了清洁单元613的每个部件在Z方向上的布置关系的剖视图。如上所述,清洁框架614的开口614b通过清洁刮板66的刮板状橡胶66a和防喷板626来抑制调色剂在感光鼓1的旋转方向上的泄漏。此外,开口614b在Z方向上的各端部处设置有端部密封部件627,并且开口614b的一部分在Z方向上与刮板状橡胶(弹性部件)66a接触,以与感光鼓1紧密接触从而抑制调色剂泄漏。在Z方向上,驱动力接收表面673a设置在清洁刮板66的刮板状橡胶66a的前方(在Z1方向上),并且驱动力接收表面673a的至少一部分至少与端部密封部件627重叠。换句话说,当驱动力接收表面673a和端部密封部件627投影到鼓单元的轴线上时,驱动力接收表面673a的投影区域的至少一部分和端部密封部件627的投影区域的至少一部分彼此重叠。
与实施例5一样,驱动力接收表面673a围绕法兰部件670的旋转轴中心扭转。扭转方向使得相对于感光鼓1的旋转方向而言驱动力接收表面673a的外侧(相对于Z1方向)是在驱动力接收表面673a的内侧(相对于Z2方向)的上游,扭转量设定为约1度/1mm。
与实施例5一样,驱动力接收表面73的长度L2和在Z方向上从圆筒部71的前端面到接合部673的前侧端面的距离L1满足L1>L2。
(制造方法说明)
如实施例5的情况,在使用注塑成型来制造的情况下,优选地是由圆筒侧模具660和安装部侧模具661组成的两件式模具(图62所示)。
类似于实施例5,插入锥部673的端部和驱动力接收表面673a的端部布置在Z方向上的相同位置处,并且接合部673处的模具分型面662是直的。
如实施例5那样,法兰部件670的根部674a所设置处的部分的内径设定为与其它部分的内径大致相同。
类似于实施例5,在垂直于旋转轴线(Z方向)投影的法兰部件670的投影平面上,接合部673和支撑件674不与其它部分重叠(如图60所示)。
(对准部件的说明)
与实施例5一样,对准部件633设置有倒锥形633a、压配合部633b、锁止部633c和凸部633d(图63所示)。凸部633d是用于使对准部件633的相位和法兰部件670的相位彼此匹配的部分。
与实施例5一样,在Z方向上,在主组件驱动轴101的半球形101c与接触部633e接触的状态下,主组件驱动轴101的半球形101c的中心101h处于驱动力接收表面673a的范围内。对准部件633安装到法兰部件670(图58所示),以满足该条件。
此外,如图58所示,法兰部件670在对应于压配合部633b的位置处设置有被压配合部672a。被压配合部672a在Z方向上相对于压配合部672d而言设置在感光鼓单元30的内侧(Z2方向侧)。因此,可以抑制由于压配合部672d压配合引起的变形对被压配合部672a的影响。由此,可以高精度地对准倒锥形33a的中心和感光鼓1的中心。
[将联接件接合到主组件驱动轴的接合过程]
将详细描述联接件628与主组件驱动轴101接合的接合过程。
如图64的部分(a)所示,类似于实施例1,相对于当盒7相对于成像设备主组件100A定位时的角度(图64的部分(e)所示),联接件628以约0.5至2度倾斜的状态插向主组件驱动轴101。
首先,如图64的部分(b)所示,法兰部件670的圆筒部671的内周面671b的自由端抵接主组件驱动轴101的粗略引导部101g。主组件驱动轴101配置成以悬臂的方式支撑支承部101d。因此,类似于实施例5,在主组件驱动轴101的粗略引导部101g与联接件670的内周面671b相配合的状态下,将联接件7插至主组件驱动轴101上。类似于实施例1,在Z方向上,接合部673的驱动力接收表面673具有长度L2,其满足L1>L2,L1是从圆筒部671的前端面到接合部673的前端面的距离(如图58所示)。因此,类似于实施例5,可以抑制主组件驱动轴101的自由端处的半球形部101c碰撞接合部673或基部674的非预期部分。因此,可以保护接合部673和基部674。
当联接件628从图64的部分(b)所示的状态进一步朝向主组件驱动轴101的后侧插入时,接合部673的安装锥形表面573d和主组件驱动轴101的自由端的半球形部101c彼此接触。由于插入锥形表面573d的倾斜表面和半球形101c的球形形状,主组件驱动轴101基本上被引导到三个接合部673的中心。
类似于实施例5,当联接件628进一步插到主组件驱动轴101上时,基部674径向向外弹性变形,使得接合部673顺应半球形101c。结果,如图65的部分(a)所示,接合部673朝主组件驱动轴101的轴部101f的外径移动(缩回)。通过此运动,如图64的部分(d)所示,联接件628安装到主组件驱动轴101,直到接合部673的拆卸锥形表面673e在Z方向上比主组件驱动轴101的主组件侧拆卸锥部101i更深。
之后,与实施例1类似,盒7抬起,使得盒7的鼓单元轴承部件39L抵接前侧盒定位部110。通过如此抬起盒7,盒7相对于成像设备主组件100A定位(如图21的部分(d)所示)。通过该盒7的操作,消除了联接件628的倾斜,如图64的部分(e)所示。
如实施例5那样,当主组件驱动轴101旋转时,主组件驱动传递凹槽101a和接合部673的相位对准。结果,消除了基部674的至少一部分弹性变形,并且接合部673的自由端侧的一部分进入主组件驱动传递凹槽101a。由此,联接件628和主组件驱动轴101接合(如图65的部分(b)所示)。
当主组件驱动传递凹槽101a和接合部673的相位彼此相位对准时,至少基部674的弹性变形在图64的部分(d)的阶段释放,并且得到图65的部分(b)的状态。
[通过主组件驱动轴来驱动联接件]
类似于实施例1,驱动力接收表面673a具有扭转形状,并且相对于法兰部件670的旋转轴线倾斜。这是为了当在驱动力接收表面673a处从主组件驱动轴101接收驱动力时,产生力来使得对准部件633的倒锥形633a可靠地接触主组件驱动轴101的自由端的半球形101c。扭转方向使得驱动力接收表面673a的外侧(Z1方向侧)相对于感光鼓1的旋转方向设置在内侧(Z2方向侧)的上游(如图66所示)。
类似于实施例5,当沿着Z方向观察法兰部件670时,沿着与驱动力接收表面673a垂直的方向从驱动力接收表面673a的内径端673b引出直线。相对于该直线,根部674a设置在法兰部件670的旋转方向的上游侧(图67)。通过这样做,当从主组件驱动轴101提供驱动力F1时,卷绕部574b围绕轴部101f卷绕。因此,与实施例5类似,即使由感光鼓单元30接收到的负荷发生变化,基部574的变形量也较小,因此可以将变形对感光鼓单元30旋转的影响抑制到小的程度。
此外,在本实施例中,在Z方向上,基部674的根部674a设置在与压配合部672d相同的位置(图59所示)。也就是说,在Z方向上,根部674a设置在感光鼓1的内部。也就是说,当感光鼓(圆筒)1和基部674投影到感光鼓1的轴线上时,基部674a的投影区域与感光鼓1的投影区域在轴线上重叠。特别地,在本实施例中,基部674的整个投影区域与感光鼓1的投影区域重叠。也就是说,基部674的整个投影区域在感光鼓1的投影区域内部。
类似地,在Z方向上,接合部673设置在感光鼓1的内部。也就是说,当感光鼓1和接合部673投影到感光鼓1的轴线上时,接合部673的投影区域与感光鼓1的投影区域在轴线上重叠。
在实施例5中,根部574a相对于Z方向外侧超过安装部572(图59)。然而,利用这种结构,当驱动力接收表面573a从主组件驱动轴101接收驱动力F1时,根部574a和压配合部572d之间的圆筒部571可能会扭转变形。
另一方面,如本实施例在根部674a的至少一部分在Z方向上布置在与压配合部672d相同的位置处的情况下,扭转变形量变小。这是因为:压配合部672d被感光鼓1覆盖,使得即使从外部经由基部674a施加力,压配合部672d也几乎不变形。也就是说,如果根部674a安装到压配合部672,那么即使驱动力接收表面573a从设备主组件接收驱动力,压配合部672也不易扭转变形并且圆筒部671也不易扭转变形。即,法兰部件670的变形量可以被抑制得很小。
结果,即使由感光鼓单元30接收到的负荷发生改变,法兰部件670的变形量也较小,因此可以抑制变形对感光鼓单元30旋转的影响。结果,可以更稳定地驱动感光鼓1。
此外,接合部673(驱动力接收表面673a)在Z方向上设置在感光鼓1的内部。通过采用这种配置,可以提供以下效果。
当主组件驱动轴101和联接件628的位置由于部件公差而偏离时,如果驱动力接收表面673a设置在远离主组件驱动轴101的支承部101d的位置处,则可以使主组件驱动轴101的倾斜度小。与将驱动力接收表面673a设置在圆筒部内侧相比,通过将驱动力接收表面673a如本实施例那样设置在压配合部672d内侧,可以将驱动力接收表面673a设置在感光鼓1(Z方向)的更内侧。利用这种布置,当联接件628的位置相对于主组件驱动轴101的位置偏离时,可以抑制主组件驱动轴101的倾斜。结果,可以稳定地驱动感光鼓1。
[从主组件驱动轴移除联接件]
参考图69,将描述联接件的移除操作。如实施例5那样,当主组件驱动轴101的旋转驱动停止时,驱动力接收表面673a和主组件驱动传递表面101b彼此接触。在该状态下,接合部673的一部分在主组件驱动传递凹槽101a中(图68的部分(a)所示)。
当盒门104打开时,下部前侧盒引导件109下降,并且鼓单元轴承部件39L从成像设备主组件100A的前侧盒定位部110分开。此时,如实施例5(图68的部分(b)),联接件628和主组件驱动轴101相对于安装完成状态(Z方向)倾斜大约0.5至2度。
如实施例5那样,当盒7开始从成像设备主组件100A移除时,接合部673的拆卸锥形表面673e抵接主组件侧拆卸锥部101i。当拆卸锥形表面673e抵接主组件侧拆卸锥部101i时,基部674开始弹性变形并使接合部673沿着主组件侧拆卸锥部101i径向向外移动(图68的部分(c))。
此外,如实施例5那样,状态与图65的部分(a)相同,当联接件628从主驱动轴101脱离时,基部674进一步弹性变形,并且接合部673朝轴101的轴部101f的外径移动。随着接合部673朝轴部101f的外径移动,接合部673与主组件驱动传递凹槽101a之间的接合被解除(消除)。在这种情况下,如图68的部分(d)所示,联接件628可以从主组件驱动轴101移除。
此外,如图68的部分(e)所示,当联接件628从主组件驱动轴101移除时,基部674的弹性变形被解除,并且接合部673的位置返回到弹性变形前的位置。
通过上述操作,联接件628可以从主组件驱动轴101移除。
[法兰部件的嵌入成型]
只要安装性和驱动传递稳定,可以适当地选择联接件628的材料、形状和制造方法。特别地,当考虑到大批量生产时,优选使用树脂材料。
具体地,通过使用下面示例的树脂材料(POM、PPS、PS和尼龙等)形成联接件628,可以提供令人满意地满足相对于设备主组件的驱动传递性能和安装性的结果。
在此情况下,下面将描述进一步提高联接件性能的调查结果。
在高温条件下,在法兰部件670的接合部673和主组件驱动轴101的主组件驱动传递凹槽101a彼此不同相的状态下,也就是说基部674保持处于弹性变形的状态下,设备放置不运行。如果该状态继续,则基部674中会发生蠕变变形。蠕变变形量取决于施加到基部的应力以及环境温度,因此蠕变变形量取决于基部的笔直部厚度674l和树脂材料而变化。在此特殊情况下,下面将描述进一步提高可靠性的深入研究结果。
图69是示出基部3674的蠕变变形较大时发生的情况的图示。具体地,该图示出了驱动力接收表面3673a的内径端3673b径向向外变形的程度达到与释放部101j接触的位置的状态。例如,当使用具有大蠕变变形性的树脂材料时,基部3674的蠕变变形甚至会发展到在某些情况下当主组件驱动轴101旋转时不能在径向上向内拉动接合部3673的程度。换句话说,有可能感光鼓1不能够稳定地旋转,或感光鼓1不能被驱动。
因此,为了抑制蠕变变形,将金属板(板金,板状金属)作为辅助部件嵌入到树脂材料的内部。结果,与仅用树脂形成的结构相比,可以抑制蠕变变形。此外,只要树脂材料(诸如POM和PPS)具有优异的抗蠕变性,则在树脂内不放置辅助部件的情况下也可以获得确保足够可靠性的结果。
条件1:POM(从日本AsahiKaseiChemicalsCorporation获得的LC750):内部有厚度为0.2mm的不锈钢金属板。
条件2:PPS(从日本TorayIndustries获得的TorelinaA900)。
条件3:POM(从日本AsahiKaseiChemicalsCorporation获得的LC750)。
条件4:PS(从日本PS获得的VS142):内部有厚度为0.2mm的不锈钢金属板。
条件5:PS(从日本PS获得的VS142)。
当法兰部件670的接合部673和主组件驱动传递轴101的主组件驱动传递凹槽101a彼此未相位对准并且存放在高温环境中时(50℃,三天),结果是在上述条件
也就是说,即使基部674仅由树脂材料制成,但只要该材料具有足够的抗蠕变性,就足以在没有嵌入加强部件的情况下抗蠕变变形。为了确保即使在高温环境下长期接收情况下的高可靠性,优选地嵌入辅助部件。换句话说,从抑制蠕变变形的观点出发,可以说优选地如条件1中那样用不锈钢制金属板来加强诸如POM的抗蠕变性优异的树脂材料。即,能够防止驱动力接收表面673a与主组件驱动传递表面101b的接合变浅,从而可靠地与主组件驱动轴101接合。
在下文中,将详细描述用于在法兰部件670中嵌入成型金属板部件635的结构。
在本实施例中,作为加强部件的三个金属板部件635(由不锈钢制成的金属板)在法兰部件的周向上等距地布置。金属板部件635是通过机械加工金属板(板金)形成的部件,并且是由不锈钢制成的板,即主要由铁制成的合金板。金属板部件635不是必须由不锈钢或铁制成,而是可以由其它材料制成。
如图70所示,金属板部件635具有基部内部部分635a、接合部内部部分635c、法兰部内部部分635b以及连接部635d。
在分型面662处,法兰内部部分635b夹持在圆筒侧模具660和安装部侧模具661之间。这样做是为了将金属板部件635在法兰部件670的Z方向上稳定地安装到法兰部件670。此外,由两个金属模具夹持的部分(受压部635h)配置成从树脂露出。也就是说,金属板部件635具有从树脂部暴露的部分。
此外,如图71所示,从夹紧凹槽672e观察,受压部635h中的一个设置在相位偏移90度的位置处。因此,夹紧凹槽672e和受压部635h可以布置成在周向上彼此不重叠。如图29所示,法兰部内部部分635b布置成垂直于设置在基部674中的基部内部部分635a。法兰部件670在凸缘部675中具有三个切除部675a。然后,将受压部635h布置在切除部所设置的范围内。切除部675a在周向上均等地布置,并且切除部675a中的一个设置在垂直于夹紧凹槽72e的位置处。
基部内部部分635a包括(基部674的笔直部674c内部的)笔直部内部部分635e和卷绕部674b内部的卷绕部内部部分635f(如图72所示)。
卷绕部内部部分635f可以不具有对应于卷绕部674b的R形状,而是可以具有如图72所示的笔直形状。
此外,如图72所示,形成在基部内部部分635a中的连接孔(通孔)635g可以与金属板正反面上的树脂连接,以增加树脂和金属之间的粘合力。也就是说,连通孔63g是设置有树脂的孔。
为了防止基部内部部分635a在注塑成型时由于树脂压力而变形,并且为了通过上述圆筒部侧模具660和安装部侧模具661保持基部内部部分635a,基部内部部分635a在基部674的部分处露出。这增加了基部674的成型精度。
具体来说,如图72和图73所示,在笔直部内部部分635e和卷绕部内部部分635f的树脂成型部处分别设置有笔直部切除部674g和卷绕部切除部674h。在基部内部部分635a中包括暴露在树脂部外部的笔直部暴露部635i以及卷绕部暴露部635j。
笔直部暴露部635i和卷绕部暴露部635j被夹持在圆筒部侧模具660和安装部侧模具661之间。由此,能够抑制因注塑成型时的树脂压力导致的基部内部635a的变形。
另外,如图74和图75所示,笔直部切除部674g和卷绕部切除部674h分别具有笔直部切除部锥形表面674i和卷绕部切除部锥形表面674j。圆筒部侧模具660和安装部侧模具661分别具有锥形形状,以对应于笔直部切除部锥形表面674i和卷绕部切除部锥形表面674j的形状。因此,即使由于金属板部件635的尺寸公差而导致相对于金属模具的对应凹槽形状发生一定程度的不对准,圆筒部侧模具660和安装部侧模具661的锥形形状也能够使其引导到模具的预定位置(模具的相应凹槽形状)。结果,当树脂部成型时,接合部内部部分635a设置在接合部673内部。
如图73所示,连接部635d具有用于把基部内部部分635a和法兰部内部部分635b连接起来的形状。
上述是用于将金属板635嵌入成型到法兰部件670中的结构的描述。
而且,如在本实施例中那样,可以使用上述实施例和下文将要描述的实施例的嵌入成型以获得良好的蠕变性能。
<实施例7>
参考图76,将描述实施例7。
在该实施例中,驱动力接收部的一部分和用于支撑驱动力接收部的支撑部(接合部673和基部674)的一部分设置在感光鼓1的内部。
与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例6中,在Z方向上,基部674的根部674a设置在与压配合部672d相同的位置(图59所示)。
另一方面,在本实施例中,在Z方向上,基部774a的一部分安装在压配合部772d上。也就是说,当基部674和感光鼓1投影到感光鼓1的轴线上时,基部774a的投影区域的一部分与感光鼓1的投影区域的一部分重叠。另一方面,根部774a的投影区域的一部分位于感光鼓1的投影区域的外部。
利用这种结构,虽然不如实施例6那样,但是也可以抑制当驱动力接收表面(驱动力接收部)773a接收到驱动力F1时圆筒部771的扭转变形,并且也可以将法兰部件70的变形量抑制得较小。结果,即使感光鼓单元30上的负荷发生变化,也可以把变形对感光鼓单元30旋转的影响抑制到小的程度。结果,可以稳定地驱动感光鼓1。
<实施例8>
参考图77A、图77B、图88和图79,将描述实施例8。
在本实施例中,用于支撑驱动力接收部873a的支撑部(接合部873和基部874)在联接件的周向上延伸,同时支撑部还沿联接件的轴向延伸。
与上述实施例(特别是实施例5)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例5中,驱动力接收表面573a和基部574的根部574a在Z方向上设置在圆筒部571的内周面571b上(如图39所示)。另外,如图45所示,基部574的根部574a布置成在Z方向上与驱动力接收表面573a的整个区域重叠。也就是说,连接基部574的后端(根部574a)与前端(驱动力接收表面573a)的直线大致垂直于法兰部件的轴线(Z方向)。也就是说,基部574相对于Z方向(轴线)倾斜约90度。
相反,在本实施例中,基部874延伸的方向相对于与Z方向垂直的方向倾斜。换句话说,基部874至少在联接件的周向上延伸,但是其延伸方向不与周向平行。基部874在联接件的周向上延伸,但也沿联接件的轴向延伸。结果,基部874相对于联接件的周向倾斜。
此外,在Z方向上,基部874的根部874a布置成使得其一部分与卷绕部874b彼此重叠。
在Z方向上,驱动力接收表面873a和根部874a以与实施例5相同的方式设置在圆筒部871的内部。
如实施例5那样,当驱动力接收表面873a接收到驱动力F1时,卷绕部874b卷绕在主组件驱动轴101的轴部101f上,并且卷绕部874b与轴部101f一体地旋转以通过笔直部874c接收由驱动力F1产生的旋转力Fc。
与本实施例不同,图78示出了基部3874的根部3874a与卷绕部3874b不完全重叠的情况。当笔直部3874c接收到旋转力Fc时,根部3874a接收力Fc的反作用力-Fc。笔直部3874c被旋转力Fc和反作用力-Fc拉动,使得笔直部3874c的倾斜在垂直于Z方向的方向上变得较平缓。在笔直部3874c的倾斜变得平缓之后,旋转力Fc经由圆筒部3871和安装部872传递到感光鼓1。
结果,当由感光鼓单元30接收的负荷发生改变并且因此旋转力Fc改变时,基部3874的变形量改变,使得对感光鼓单元30旋转的影响大于在本实施例中的。
另一方面,根据本实施例的结构,根部874a在Z方向上具有与卷绕部874b重叠的部分。也就是说,当卷绕部874b和根部874a投影到鼓单元30的轴线上时,卷绕部874b的投影区域的至少一部分和根部874b的投影区域的至少一部分彼此重叠。
以这种方式,如图79所示,当接收旋转力Fc时,在与接收部重叠的根部874a接收旋转力Fc。因此,可以在笔直部874c相对于与Z方向垂直的方向的倾斜变平缓的方向上基本上不变形地把旋转力Fc传递到圆筒部871。结果,即使由感光鼓单元30接收的负荷发生变化,也可以减小对感光鼓单元30旋转的影响。
为了如本实施例中那样将基部874卷绕在主组件驱动轴101上,基部874最好相对于Z轴方向(联接件的轴线Ax)倾斜30度至90度(不小于30度且不大于90度)。更优选的范围在50度至90度之间(50度至90度)。
如下所述地确定基部874(驱动力接收部的支撑部)相对于联接件轴线Ax的倾斜度。
沿着包括基部874的固定端(根部874a)且通过联接件轴线Ax(图79)的平面截取联接件的横截面。在该横截面中,可以看到基部874与轴线Ax之间的角度。图79中,沿着基部874的左侧面在从基部874的固定端(根部874a)延伸到自由端(接合部873)的直线与从固定端(874a)平行于轴线Ax延伸的直线之间形成的角度是要确定的角度。在图79中,该角度测量为约36度。
在本实施例中,基部874偏离成使其自由端沿轴向设置在固定端的外侧(箭头Z1侧)。
然而,基部874可以倾斜成使得其自由端比固定端设置在沿轴向更靠内侧(箭头Z2侧)。在这种情况下,基部874(驱动力接收部的支撑部)相对于轴线Ax的倾斜可以如下定义。在沿基部874的右侧面从基部874的固定端到自由端延伸的直线和平行于轴线Ax从固定端延伸的直线之间形成的角度是要确定的角度。
也就是说,测量的该角度使得基部874相对于轴线Ax总是为90度以下。
<实施例9>
参考图80至图82,将描述实施例9。
在该实施例中,基部974的固定端(根部974a)设置在感光鼓1的内部,而驱动力接收表面673a和接合部673的至少一部分设置在感光鼓1外。
与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例6中,驱动力接收表面673a和基部674的根部674a在Z方向上设置在安装部672的内周面672h上(如图59所示)。此外,基部674的根部674a配置成在Z方向上与驱动力接收表面673a的整个区域重叠。也就是说,驱动力接收表面673a和用于支撑驱动力接收表面673a的整个支撑部全都设置在感光鼓1的内部。
另一方面,在本实施例中,如图80所示,基部974相对于与Z方向垂直的方向倾斜,基部974的根部974a形成为使得其一部分与卷绕部974b在Z方向上重叠。在Z方向上,如实施例6那样,根部974a设置在安装部972的内周面972h上。
把根部974a布置成使得根部974a的一部分在Z方向上与卷绕部974b重叠能够获得类似于实施例8的效果。此外,与实施例5相比,把根部974a在Z方向上布置在安装部972的内周面972h上的效果与实施例6相同,并且本实施例具有与实施例8相同的效果。
如图81所示,即使驱动力接收表面(驱动力接收部)973a在Z方向上配置在安装部972的内周面972h上,也能够得到同样的效果。
如图82所示,在根部974a的一部分在Z方向上与安装部972的内周面972h重叠的结构中,与实施例5相比,在本实施例中也可以得到与实施例7的效果相似的效果。
<实施例10>
参考图83至图86,将描述实施例10。与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。在实施例6中,如图60所示,接合部673和基部674在法兰部件670的周向上均等地配置在三个位置上。
在该实施例中,如图83所示,接合部1073和基部1074设置在一个位置处。接合部1073设置有驱动力接收表面(驱动力接收部)1073a。接合部1073和基部1074是用于支撑驱动力接收部的支撑部。
设置有力接收部1077,以抑制当联接件1028安装到主组件驱动轴101时因基部1074的弹性变形力导致主组件驱动轴101过度倾转。
更具体地,在将联接件1028接合到主驱动轴101的过程中,基部1074弹性变形,并且接合部1073径向向外移动。此时,通过基部1074的弹性变形力把主组件驱动轴101的轴部101f向相反侧推。此时,如图84所示,力接收部1077与轴部101f接触,以抑制主组件驱动轴101的过度倾转。结果,力接收部1077保持盒7对成像设备主组件100A的令人满意的安装性。
在基部1074的弹性变形之前的状态下,插入锥形表面1073d的至少一部分和法兰部件1070的至少一部分彼此相对,法兰部件1077的轴线处于它们之间(图83)。类似地,在基部1074发生弹性变形的状态下,驱动力接收表面的至少一部分和力接收部1077的至少一部分彼此相对,轴线处在它们之间(如图84)。
如图85所示,如实施例6那样,通过具有倒锥形部1033a的对准部件1033来执行联接件1028和主组件驱动轴101的对准。此时,力接收部1077的半径R3大于轴部101f的半径R2,力接收部1077不抵接轴部101f。
如图84所示,力接收部1077在Z方向上的位置与接合部1073的位置相同。
在本实施例中,如实施例6那样,接合部1073和基部1074的根部1074a在Z方向上设置在安装部1072的内侧。但是,如实施例5那样也可以设置在圆筒部1071中(图86的部分(a)),或者如实施例7那样可以将根部1074a的一部分安装在压配合部1072d的范围内(图86的部分(b))。如实施例8和实施例9所示,基部可以相对于与Z方向垂直的方向倾斜,并且在Z方向上基部1074的根部1074a可以部分地与卷绕部1074b重叠(图86的部分(c)、部分(d)、部分(e)和部分(f))。
<实施例11>
参考图87A、图87B、图88和图89,将描述实施例11。
与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。在实施例6中,如图60所示,接合部673和基部674均匀地配置在法兰部件670的周向上的三个位置,以及如图58所示,联接件628包括法兰部件670和对准部件633。
另一方面,在该实施例中,如图87A和图87B所示,在联接件1128中设置有一个接合部1173和一个基部1174。接合部1173设置有驱动力接收部。接合部1173和基部1174是可动地支撑驱动力接收部的支撑部。
如图87A、图87B、图88和图89所示,联接件1128设置有径向定位部1076a,该径向定位部的直径与主组件驱动轴101的轴部101f的直径基本相同,在周向上所处位置与接合部1173和基部1174的位置不同。此外,其设置有抵接部1076b,用于当主组件驱动轴101的驱动传递到联接件228时与主组件驱动轴101的自由端的半球形101c接触。
由此,两个部件即实施例6中的法兰部件670和对准部件633在此由一个部件构成。
如图87A所示,在周向上布置有三个径向定位部1176a。连接径向定位部1176a的外端和法兰轴线中心的连线所成角度大于180度,并且设置在与接合部1173成除120°和240°之外的位置处。如实施例1所述,主组件驱动传递凹槽101a均匀地布置在主组件驱动轴101的轴部101f上的周向上的三个位置处(间隔120°,基本等间隔)。如实施例1那样,在主组件驱动轴101的主组件驱动传递凹槽101a中的一个和接合部1173彼此相位对准后,主组件驱动传递表面101b和驱动力接收表面1173a接触,由此驱动力从主组件驱动轴101传递到联接件1128。
此时,径向定位部1076a处于的位置不同于均等设置在主组件驱动轴101的轴部101f上的三个主组件驱动传递凹槽101a的位置。径向定位部1076a不进入驱动传递凹槽101a。因此,径向定位部1176a在径向上位于轴部101f上,不会受未与驱动力接收表面1173接合的两个主组件驱动传递凹槽101a的影响。
此外,如图88所示,径向定位部1176a在Z方向上设置在与驱动力接收表面1173a相同的位置处。
在实施例6中,法兰部件670和对准部件633由两个部件构成,但是在本实施例中可以上述方式由一个部件构成。
如图87A所示,从Z方向观察,抵接部1176b不具有与接合部1173、基部1174和径向定位部1176a的投影平面或在投影平面周围约1mm重叠的部分。因此,类似于实施例6的法兰部件670,联接件1128可以由包括圆筒侧模具和安装部侧模具的两件式结构的模具注塑成型。
在本实施例中,如实施例6那样,接合部1173和基部1174的根部1174a在Z方向上设置在安装部1172的内侧。然而,如实施例5那样也可以设置在圆筒部1171中(图90的部分(a)所示),或者如实施例7那样根部1174a的一部分在压配合部1172d中(图90的部分(b)所示)。此外,如实施例8和实施例9那样,基部可以相对于与Z方向垂直的方向倾斜,并且在Z方向上基部1174的根部1174a可以部分地与卷绕部1174b重叠(图90的部分(c)、部分(d)、部分(e)和部分(f))。
<实施例12>
参考图91至图93,将描述实施例12。与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。在实施例6中,如图60所示,接合部673和基部674在法兰部件670的周向上均等地配置在三个位置上。另一方面,在本实施例中,如图91所示,接合部1273和基部1274设置在两个位置处(120度间隔)。接合部1273设置有驱动力接收部1273a。接合部1273和基部1274是可动地支撑驱动力接收部1273a的支撑部。
此外,设置了力接收部1277,以抑制当联接件1128安装到主组件驱动轴101时由于基部1274的弹性变形力引起的主组件驱动轴101过度倾转。
更具体地,在联接件1228与主驱动轴101接合的过程中,力接收部1277的基部1274弹性变形,并且接合部1273径向向外移动。此时,通过基部的弹性变形力把主组件驱动轴101的轴部101f沿着与接合部相反的周向推。此时,力接收部1277与轴部101f接触,并且抑制主组件驱动轴101的过度倾转。结果,可以保持满意的盒7对成像设备主组件100A的安装性能。
其相对于周向设置的位置包含了把基部1274弹性变形之前插入锥形表面1273d的各内径端连接起来的连线的中点与法兰部件1270的轴线连接起来的连线的延长线(图91)。在本实施例中,接合部1273以120度的间隔配置,因此它们也可以配置成包含从插入锥部1273d的内径端起120度的范围。
如图92所示,如实施例6那样,通过具有倒锥形部1233a的对准部件1233来执行联接件1228和主组件驱动轴101的对准。此时,力接收部1277的半径R3大于轴部101f的半径R2,力接收部1277不与轴部101f抵接。
如图92所示,力接收部1277在Z方向上的位置与接合部1273的位置相同。
在本实施例中,如实施例6那样,接合部1273和基部1274的根部1274a在Z方向上设置在安装部1272的内侧。但是,如实施例5那样也可以设置在圆筒部1271中(图93的部分(a)),或者如实施例7那样可以将根部1274a的一部分安装在压配合部1272d的范围内(图93的部分(b))。如实施例8和实施例9所示,基部可以相对于与Z方向垂直的方向倾斜,并且在Z方向上基部1274的根部1274a可以部分地与卷绕部1274b重叠(图93的部分(c)、部分(d)、部分(e)和部分(f))。
<实施例13>
参考图94至图98,将描述实施例13。
与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例6中,如图60所示,接合部673和基部674在法兰部件670的周向上均等地配置在三个位置上。同样地,在主组件驱动轴101中,在主组件驱动轴101的轴部101f的周向上均等地布置有三个主组件驱动传递凹槽101a。
在该实施例中,如图94和图95所示,接合部1373和基部1374在法兰部件1370的周向上均等地配置在两个位置。接合部1373设置有驱动力接收部1373a。接合部和基部是可动地支撑驱动力接收部的支撑部。接合部是突出部,基部是延伸部。
而且,如图95所示,主组件驱动轴13101同样具有在主组件驱动轴13101的轴部13101f的周向上均等地布置的两个主组件驱动传递凹槽13101a。
四个钩挂部1372b均等地布置在法兰部件周向上的四个位置处;此外,如图96所示,对准部件1333的锁止部1333c也布置在四个对应位置处。
如实施例6那样,接合部1373和基部1374的根部1374a在Z方向上设置在安装部1372的内侧(如图97所示)。然而,如实施例5那样,接合部1373和基部1374的根部1374a可以设置在圆筒部1371中(如图98的部分(a)所示)。如实施例7那样,根部1374a的一部分可以安装到压配合部1372d(图98的部分(b))。如实施例8和实施例9所示,基部可以相对于与Z方向垂直的方向倾斜,并且在Z方向上基部1374的根部1374a可以部分地与卷绕部1374b重叠(图98的部分(c)、部分(d)、部分(e)和部分(f))。
<实施例14>
参考图99至图106,将描述实施例14。
与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例6中,使用具有卡扣配合形状的锁止部633c作为用于抑制对准部件633从法兰部件670脱离的形状(图63)。
相反,在本实施例中,如图99所示,作为将对准部件1633固定到法兰部件1670的方法,设置有凹部1633k和旋转止动部1633l。
使用倒锥形1633a相对于联接件1628对准主组件驱动轴101的半球形部101f的结构与实施例6的结构相同。
具体结构将在下面描述。
如图99所示,提供了具有凹槽形状1633n的凹部1633k,该凹槽形状相对于联接件1628的旋转方向朝向上游侧开口并且相对于Z1方向设置在接合部1633b的下游侧。
如图99所示,旋转止动部1633l相对于Z2方向配置在接合部1633b的下游侧并且在装配部1633b的周向延伸,此外还具有相对于联接件1628的旋转方向在上游侧的自由端。
旋转止动部1633l的卡扣配合形状的自由端1633m具有延伸到对准部件1633的径向内侧的形状。如图100所示,旋转止动部1633l在卡扣配合形状的固定端侧具有根部1633r作为弹性变形的支点,自由端1633m设置有锁止面1633q。相对于旋转方向,根部1633r设置在与锁止面1633q垂直并通过锁止面1633q的前端的直线的下游侧。此外,自由端1633m相对于联接件1628的旋转方向在上游侧设置有锥形形状1633n。
如图101所示,法兰部件1670在Z方向上与凹部1633k相对应的位置处设置有钩挂部1672b,以及在对应于旋转止动部1633l的位置处设置有接合部1672i。
如图102所示,类似于实施例6的钩挂部672b,三个钩挂部1672b在法兰部件1670周向上基本上设置在各根部1674a的中间。此外,如图99所示,凹部1633k的凹槽形状部1633n也分别配置在与钩挂部1672b对应的三个位置。
如图101所示,接合部1672i相对于引导锥部1672g设置在背侧(Z2方向侧),并且具有从安装部1672的端面1672l向法兰部件1670的背侧(Z2侧)突出的形状。
如图101和图103所示,接合部1672i从内周1672h径向向外配置,并且设置在压配合部1672d的径向内侧。
在旋转方向上游侧的接合面1672j具有与旋转止动部的自由端1633m对应的形状。
如图99所示,对准部件1633具有抵接面1633p,其在Z方向上与法兰部件1670的安装部1672的端面1672l接触。如图106所示,在Z方向上凹部1633k的凹槽形状1633n的宽度大于钩挂部1672b的宽度。当法兰部件1670的端面1672l与抵接面1633p抵接时,钩挂部1672b在Z方向上进入凹槽形状部1633n的范围。
凹槽形状部1633n具有相对于钩挂部1672b的游隙。通过该游隙,对准部件1633能够相对于法兰部件1670在Z方向上移动。即使对准部件1633可以通过游隙在Z方向上移动,也可以将倒锥形1633a设置成使得主组件驱动轴101的半球形101c的中心101h在Z方向上与驱动力接收表面(驱动力接收部)1673a重叠。
图105示出了将对准部件1633组装到法兰部件1670的方法。首先,如图105的部分(a)所示,对应于对准部件1633的安装完成状态(图105的部分(c)),以相对于旋转方向下游侧的相位,对准部件1633从后侧(Z2侧)到前侧(Z1侧)组装到法兰部件1670。
如图105的部分(b)所示,对准部件1633组装到法兰部件1670上,直到抵接面1633n抵接法兰部件1670的端面1672l为止。通过这样做,凹部1633k的凹槽形状部1633n在Z方向上到达与钩挂部1672b对应的位置。
随后,在将对准部件1633相对于法兰部件1670对准到在Z方向上的安装完成位置之后,对准部件沿联接件1628的旋转方向朝向上游侧旋转。如图105的部分(c)所示,设置在对准部件1633的旋转止动部1633l上的锥形形状1633i与法兰部件1670的锥形形状1672k接触。
如上所述,旋转止动部1633l具有卡扣配合形状,使得旋转止动部1633l在弹性变形的同时骑在接合部1672i上。
之后,如图105的部分(d)所示,通过相对于法兰部件1670旋转对准部件1633直到旋转止动部件16331弹性变形超过接合部1672i,对准部件1633被组装到法兰部件1670。
将考虑这样一种情况:包括联接件628的盒7上安装了实施例6中描述的对准部件633,把该盒7以强力安装到成像设备主组件100A。此时,对准部件633的倒锥形633a以强力与主组件驱动轴101的半球形101c抵接。如图63所示,实施例6的锁止部633c具有沿联接件628的轴向延伸的卡扣配合形状。
在锁止部633c所用的材料能够使卡扣配合形状部以小力弯曲的情况下,当对准部件633从主组件驱动轴101接收强力时,锁止部633c会从钩挂部672b脱离。
相反,本实施例的对准部件1633的凹部1633k通过凹槽形状部1633n来与钩挂部1672b固定,该凹槽形状部相对于联接件1628的旋转方向朝向上游侧开口并且相对于Z1方向设置在接合部1633b的下游侧。即使对准部件1633从主组件驱动轴101接收到上述强力,对准部件1633从法兰部件1670脱离的可能性也很小。这是因为:与实施例6的止动部633c不同,凹部1633k不具有卡扣配合形状。
如上所述,旋转止动部1633l的基部1633r相对于与锁止面1633q垂直并且通过锁止面1633q的前端的直线而言在旋转方向上设置在下游侧。由于这种形状,可使法兰部件1670难以从对准部件1633脱离。如果通过从主组件驱动轴101接收旋转驱动力来使对准部件1633相对于法兰部件1670旋转,则锁止面1633q变成与法兰部件的接合面1672j接触。在这种情况下,向旋转止动部1633l施加朝向法兰部件1670的旋转中心拉动的力,因此对准部件1633不会从法兰部件1670脱离。
如上所述,通过使用根据本实施例的联接件1628,当以强力将盒7安装到成像设备主组件100A时,可以减小对准部件1633从法兰部件1670脱离的可能性。
在该实施例中,卡扣配合形状设置在对准部件1633侧上,但是也可以设置在法兰部件侧。
<实施例15>
参考图107和图108,将描述实施例15。与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例6中,金属板部件635嵌入成型到法兰部件670。更具体地,如图73所示,在基部674的卷绕部674b中设置有卷绕部切除部674h,作为金属板部件635一部分的卷绕部暴露部635j没有被法兰部件670的树脂部634覆盖。此外,在金属板部件635的基部内部部分635a上设置有连接孔635g,并且金属板正反面的树脂被连接以提高树脂部634和金属板635之间的粘合强度。在实施例6中,在卷绕部674b的径向内侧上的卷绕部切除部674h的驱动力接收表面673a侧沿与法兰部件670的轴向平行的方向形成。此外,连接孔635a设置在卷绕部674b内部在Z方向上不与卷绕部切除部的锥形表面674j重叠的位置处。
利用实施例6的形状,当驱动力接收表面673a从主组件驱动轴101接收驱动力时,驱动力接收表面673a和径向内侧卷绕部切除部674h的方向彼此接近。基于此原因,应力集中在径向内侧上的卷绕部切除部674h的驱动力接收表面侧角部674k上(如图107的部分(a)所示)。然后,从作为支点的驱动力接收表面侧角部674k将应力传递到驱动力接收表面侧脊线674l(图107的部分(b))。
因此,在实施例6中,驱动力接收表面侧脊线674l的强度加强到足以抵抗施加到驱动力接收表面673a的驱动力和施加到基部674的负荷。驱动力接收表面侧脊线674l是卷绕部切除部锥形表面674j的脊线。
在该实施例中,基部具有更高的强度。也就是说,在本实施例中,连接孔1735a在卷绕部1774b的内部布置在与Z方向平行的两个位置。此外,每个联接孔1735a的一部分布置成在Z方向和卷绕部1774b的周向上与卷绕部切除部锥形表面1774j的驱动力接收表面侧脊线1774l重叠(图108所示)。
如上所述,树脂部1739和金属板部件1735最牢固地固定的部分是连接孔1735a。
连接孔1735a设置成使其一部分在Z方向和卷绕部1774b的周向上与驱动力接收表面侧脊线1774l重叠。即使应力集中在驱动力接收表面侧角部674k上,也能够防止应力传播到驱动力接收表面侧脊线1744l。因此,可以更可靠地保护接收表面侧脊线1744l。
结果,可以将更强的驱动力和负荷施加到驱动力接收表面和树脂部。此外,主组件驱动轴101的旋转和停止可以重复更多次。
在该实施例中,在Z方向上布置有两个联接孔1735a,但是也可以将联接孔1735a布置成使得它们在Z方向两端处和卷绕部1774b的周向上与驱动力接收表面侧脊线1774l重叠。因此,如图109所示,可以使用一个联接孔1735a。
<实施例16>
参考图110,将描述实施例16。
与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例6中,金属板部件635嵌入成型到法兰部件670。更具体地,如图73所示,在基部674的卷绕部674b中设置有卷绕部切除部674h,作为金属板部件635一部分的卷绕部暴露部635j没有被法兰部件670的树脂部634覆盖。此外,在金属板部件635的基部内部部分635a上设置有连接孔635g,并且金属板正反面的树脂被连接以提高树脂部634和金属板635之间的粘合强度。在实施例6中,在卷绕部674b的径向内侧上的卷绕部切除部674h的驱动力接收表面673a侧沿与法兰部件670的轴向平行的方向形成。此外,连接孔635a在卷绕部674b内部设置在Z方向上不与卷绕部切除部的锥形表面674j重叠的位置处。
利用实施例6的形状,当驱动力接收表面673a从主组件驱动轴101接收驱动力时,驱动力接收表面673a和径向内侧卷绕部切除部674h的方向彼此接近。基于此原因,应力集中在径向内侧上的卷绕部切除部674h的驱动力接收表面侧角部674k上(如图107的部分(a)所示)。
相反,在本实施例中,在法兰部件1870的内周侧上的卷绕部切除部的驱动力接收表面侧角部1874k所成的角度A形成钝角。因此,卷绕部切除部的驱动力接收表面侧脊线1874m相对于法兰部件1870的轴线倾斜设置(图110所示)。
此外,如图110所示,在驱动力接收表面侧角部1874k上设置弧形。通过采用这种结构,与实施例6相比,可以分散集中在卷绕部切除部驱动力接收表面的角部1874k上的应力。结果,可以对驱动力接收部(驱动力接收部)和树脂部1839施加更大的驱动力或负荷,并且可以更多次重复主组件驱动轴101的旋转和停止。
<实施例17>
参考图111,将描述实施例17。
与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
在实施例6中,金属板部件635嵌入成型到法兰部件670。更具体地,如图73所示,在基部674的卷绕部674b中设置有卷绕部切除部674h,作为金属板部件635一部分的卷绕部暴露部635j没有被法兰部件670的树脂部634覆盖。此外,在金属板部件635的基部内部部分635a上设置有连接孔635g,并且金属板正反面的树脂被连接以提高树脂部634和金属板635之间的粘合强度。在实施例6中,卷绕部674b的径向内侧上的卷绕部切除部674h的驱动力接收表面673a侧沿与法兰部件670的轴向平行的方向形成。此外,连接孔635a设置在卷绕部674b内部在Z方向上不与卷绕部切除部的锥形表面674j重叠的位置处。
相反,在本实施例中,如图111所示,连接孔1935a布置在卷绕部1974b内与Z方向平行的两个位置。此外,各联接孔1935a的一部分布置成在Z方向和卷绕部1774b的周向上与卷绕部切除部锥形表面1974j的驱动力接收表面侧脊线1974l重叠。
通过在法兰部件1870的内周侧上的卷绕部切除部的驱动力接收表面侧角部1974k形成钝角A,卷绕部切除部的驱动力接收表面侧脊线1974m设置成相对于法兰部件1970的轴线倾斜(如图111所示)。此外,如图111所示,在驱动力接收表面侧角部1974k上设置弧形。
通过使用本实施例的结构,可以组合提供实施例15和实施例16的效果。可以将更大的驱动力施加到接合部(驱动力接收部)和树脂部1839,并且主组件驱动轴101可以反复旋转和停止更多次。
<实施例18>
将描述实施例18。具有与实施例6中的结构和功能相同或相应的结构和功能的元件用相同的附图标记表示,并且省略其详细描述。
在实施例6中,参考图68描述了联接件628从主组件驱动轴101拆卸的操作。
如上所述,在实施例6中,通过以下操作将联接件628从主组件驱动轴101移除。
当主组件驱动轴101的旋转驱动停止时,驱动力接收表面673a和主组件驱动传递表面101b彼此接触。在该状态下,接合部673的一部分在主组件驱动传递凹槽101a中(图68的部分(a)所示)。
当盒门104打开时,下部前侧盒引导件109下降,并且鼓单元轴承部件39L从成像设备主组件100A的前侧盒定位部110分开。此时,联接件628和主组件驱动轴101相对于安装完成状态(Z方向)倾斜约0.5至2度(图68的部分(b)所示)。
当盒7开始从成像设备主组件100A移除时,接合部673的拆卸锥形表面673e抵接主组件侧拆卸锥部101i。当拆卸锥形表面673e抵接主组件侧拆卸锥部101i时,基部674开始弹性变形并使接合部673沿着主组件侧拆卸锥部101i径向向外移动(图68的部分(c))。
此外,当联接件628从主组件驱动轴101拉出时,状态变得与图65的部分(a)相同,基部674进一步弹性变形,以及接合部673向主组件驱动轴101的轴部101f外径表面移动。通过将接合部673朝轴部101f的外径表面移动,联接件628可以从主组件驱动轴101移除,如图68的部分(d)所示。
此外,如图68的部分(e)所示,当联接件628从主组件驱动轴101移除时,基部674的弹性变形被解除,并且接合部673的位置返回到弹性变形前的位置。
通过上述操作,在实施例6中,联接件628从主组件驱动轴101移除。
此外,在实施例6中,如上所述,从Z方向观察时,相对于法兰部件670的旋转方向,根部674a设置在从驱动力接收表面673a的内径端673b在垂直于驱动力接收表面673a的方向上画出的直线的上游侧(图67)。由此,当主组件驱动轴101的主组件驱动力接收表面101b和接合部673的驱动力接收表面673a彼此接触以转动时,基部674缩回,并且卷绕部674b卷绕在轴部101f上。
即使当主组件驱动轴101的旋转在该卷绕状态下停止时,也能保持驱动力接收表面101b和驱动力接收表面673a之间的接触,使得卷绕部674b保持卷绕在轴部101f上。
此外,如上所述,在实施例6中,驱动力接收表面673a围绕法兰部件670的旋转轴线的中心扭转。扭转方向是使得相对于感光鼓1的旋转方向而言,驱动力表面673a相对于感光鼓单元30的外侧(Z1方向的下游侧)是内侧(Z2方向的下游侧)的上游侧。
驱动力接收表面673a沿着阻碍拆卸操作的方向设置,因为在上述状态下,当试图从主组件驱动轴101拆卸联接件628时,驱动力接收表面673a的外侧(Z1方向侧)相对于旋转方向配置在内侧(Z2方向侧的下游)的上游侧。
因此,如果在实施例6的拆卸操作中将联接件628从主驱动轴101中拉出,则拆卸负荷大于插入负荷。
另一方面,在本实施例中,在主组件驱动轴101的旋转停止之后并且在盒7开始从成像设备主组件100A拆卸之前,主驱动轴101沿相反方向旋转。通过这样做,卷绕部674b解除了卷绕在轴部101f上的状态,因此当盒7从成像设备主组件100A中移除时可以减小拆卸负荷。
作为反向旋转方法,随着盒门104的打开操作,可以通过连杆机构等使主组件驱动轴101反向旋转,或者主组件驱动轴101的驱动源的电机可以反向旋转。
通过在拆卸操作时采用使主组件驱动轴101反向旋转的结构,不仅通过实施例6而且通过
<实施例19>
参考图112至图115、图120和图121,将描述另一实施例。首先,将描述用于将盒7安装到成像设备主组件100A的安装结构。与上述实施例中的元件对应的元件用相同的名称表示,并且在某些情况下可以省略与上述元件相同点的说明。将主要对与上述元件的不同之处进行描述。
图112是法兰部件2170和接合部件2173的剖视立体图。
图113是联接件2128的剖视图。
图114是当驱动接收部2173a被主组件驱动轴2210驱动时联接件2128的剖视图。
图115是示出当驱动力接收部(驱动力接收表面)2173a和驱动传递凹槽2210a的相位彼此不对准时将联接件2128安装到主组件驱动轴2210的操作的剖视图。
图120是示出主组件驱动轴2210的形状的立体图。
图121是示出盒7的形状的立体图。
[联接件和主组件驱动轴的结构]
参考图112、图113、图114和图120,将描述联接件和主组件驱动轴的结构。
联接件2128相对于盒7的插入方向安装到感光鼓1的自由端侧,并且主组件驱动轴2210处在成像设备主体100A的对应于联接件2128的位置。
如图113所示,联接件2128包括安装到感光鼓1上的法兰部件2170和由主组件驱动轴2210驱动的接合部件(驱动力接收部件)2173。此外,联接件2128具有锁止部件2177,用于限制接合部件2173在感光鼓1的轴向上移动。
如图112所示,法兰部件2170包括安装到感光鼓1的内周上的安装部2172、从安装部2172突出的圆筒部2171和用于安装接合部件2173的凹槽形接合部件安装部2172a。
接合部件2173是在其表面上设置有驱动力接收部的驱动力接收部件。如下文将要详细描述的那样,它也是支撑部,其支撑驱动力接收部2173a以使其可至少在联接件的径向上移动。
法兰部件2170是从接合部件2173接收驱动力的驱动力接收部件。在该实施例中,法兰部件2170固定到感光鼓1的内周,并且驱动力从法兰部件2170传递到感光鼓1。
接合部件2173和法兰部件2170之间存在间隙,并且接合部2173配置成能够相对于法兰部件2170在一定范围内沿径向和周向移动。
圆筒部2171的外周面2171a用作滑动表面,其可旋转地由安装在清洁单元13的清洁框架14上的轴承部件29的支承部29a支撑。圆筒部2171的内周面2171b用作支撑主组件驱动轴2210的支撑部。
对于接合部件2173,使用具有回弹性(弹性)的金属板部件(板状金属)。也就是说,接合部件2173是金属板状部,换句话说,是板簧。
如图114所示,接合部件2173具有驱动力接收部2173a,该驱动力接收部与在主组件驱动轴2210上设置的凹槽形状的驱动传递凹槽2210a接触并接收驱动力(旋转力)。接合部件2173安装到法兰部件2170,使得驱动力接收部2173a可在感光鼓的径向和旋转方向上移动。在本实施例中,如图114所示,利用弹簧特性将接合部件2173的根部2173b组装到接合部件安装部2172a,该接合部件安装部是法兰部件2170的凹槽形状部。结果,接合部件2173安装到法兰部件2170,使得驱动力接收部2173a可在感光鼓1的径向和旋转方向上移动。也就是说,根部2173b是由法兰部件2170的安装部2172a支撑的被支撑部(被安装部)。
接合部件2173具有以大约90度角度弯曲的弯曲部2173k。驱动力接收部2173a相对于弯曲部2173k设置在接合部件2173的自由端侧的部分(第一部分)处。另一方面,根部2173b相对于弯曲部2173k设置在接合部件2173的后端侧的部分(接合部件的第二部分)处。第二部分的长度比第一部分的长度长。
接合部件2173的第一部分和第二部分在互不相同的方向上延伸。也就是说,第一部分和第二部分延伸的方向彼此交叉。接合部件2173的第一部分从弯曲部2173k至少相对于径向向内延伸。换句话说,接合部件2173的第一部分是至少径向向内突出的突出部。
另一方面,接合部件2173的第二部分从弯曲部2173k至少在联接件的周向(更具体地,在旋转方向的上游侧)上延伸。接合部件2173的第二部分是沿着与接合部件2173的第一部分的突出方向不同的方向延伸的延伸部,也是支撑接合部件2173的第一部分的部分。如在下文中将详细描述的那样,接合部件2773的第二部分是弹性变形部,接合部件2173的第一部分可通过第二部分的变形而至少沿联接件径向移动。
如图113所示,锁止部件2177固定到法兰部件2170,以将接合部件2173夹持在法兰部件2170和锁止部件2177之间,以限制接合部件2173在感光鼓1的轴线方向移动。
在该实施例中,采用热夹持作为用于将锁止部件2177固定到法兰部件2170的固定方式(固定方法)。更具体地,法兰部件2170的夹紧凸柱2170f穿过防脱离部件2177的夹紧孔2177f,夹紧凸柱2170f的自由端被热夹紧以固定法兰部件2170和止动部件2177。然而,可以使用诸如焊接、压配合、卡扣配合等其它方式作为固定方法。
如图114所示,接合部件2173设置有第一抵接部2173c和第二抵接部2173d。第一抵接部2173c相对于旋转方向设置在驱动力接收部2173a的上游侧,以及相对于径向设置在外侧。第二抵接部2173d形成在与设置有第一抵接部2173c和驱动力接收部2173a的表面不同的表面(相异表面)上。第二抵接面2173d比第一抵接部2173c更径向向外地设置。
此外,法兰部件2170设置有第一壁表面部2170g和第二壁表面部2170h,它们在驱动力接收部2173a被驱动时分别与第一抵接部2173c和第二抵接部2173d接触。
第一壁表面部2170g是驱动力从接合部件2173传递到的接收部(接收表面)。第一壁表面部2170g设置在驱动力接收部2173a的径向外侧。
如图120所示,主组件驱动轴2210具有驱动传递凹槽2210a和被支撑部2210d。驱动传递凹槽2210a具有与驱动力接收部2173a相对应的凹槽形状(凹形)部,该凹槽形状部设置在主组件驱动轴2210的外周面上。被支撑部2210d是由法兰部件2170的内周面2171b支撑的部分。
[将联接件安装到主组件驱动轴]
参考图114和图115,将描述联接件2128到主组件驱动轴2210的安装。
首先,将盒7沿箭头方向插入,直到在插入方向上设置在驱动力接收部2173a上游侧的安装锥形表面(倒角形状)2173e和在主组件驱动轴2210的自由端处的球形形状(半球形2201d)彼此接触(图115的部分(a))。
此外,当盒7沿箭头方向插入时,接合部件2173变形,使得安装锥形表面2173e利用弹簧性能以根部2173b作为支点顺应在自由端处的半球形2201c。接合部件2173变形,使得驱动力接收部2173a沿感光鼓1的径向向外移动。
如图115的部分(b)所示,通过利用法兰部件(圆筒部2171)的支撑部(内周部2171b)对被支撑部2201d进行支撑,联接件2128可以相对于主组件驱动轴2210插入到安装完成位置。
之后,如图115的部分(c)所示,随着主组件驱动轴2210旋转,驱动传递凹槽2210a和驱动力接收部2173a变为具有相同的相位。此时,图115的部分(b)中接合部件2173朝法兰部件2170的径向外侧变形的状态解除,并且驱动力接收部2173a进入驱动传递凹槽2210a。
之后,如图114所示,驱动传递凹槽2210a与驱动力接收部2173a接触。结果,旋转驱动从主组件驱动轴2210传递到联接件2128,并且感光鼓1可以旋转。此时,首先,接合部件2173通过主组件驱动轴2210的驱动力而移动,直到第一抵接部2173c与第一壁表面部2170g接触为止。当第一抵接部2173c抵接第一壁表面部2170g时,接合部件2173通过驱动力接收部2173a接收的驱动力而以第一抵接部2173c为支点产生旋转力矩。然而,随着第二抵接部2173d和第二壁表面部2170h彼此抵接,抑制了接合部件2173的变形。结果,由驱动力接收部2173a接收的驱动力可以稳定地传递到感光鼓1。
接下来,将描述当驱动力接收部2173a和驱动传递凹槽2210a彼此相位对准时的安装。首先,盒7沿箭头方向安装,类似于图115的部分(a),在插入方向上设置在驱动力接收部2173a上游侧的安装锥形表面2173e和在主组件驱动轴2210的前端处的半球形2201c变为彼此接触。
之后,当盒7进一步沿箭头方向插入时,接合部件2173变形,使得驱动力接收部2173a通过其回弹而沿着法兰部件2170的径向向外移动。然后,联接件2128插入到主组件驱动轴2210的安装完成位置。此时,由于驱动力接收部2173a和驱动传递凹槽2210a的相位彼此匹配,所以接合部件2173的变形被解除,主组件驱动轴2210不旋转,并且建立图115的部分(c)的状态。在达到图115的部分(c)所示的状态之后,状态变为与驱动力接收部2173a和驱动传递凹槽2210a的相位彼此不对准时相同。
在前述中,对在安装到主组件驱动轴2210上的过程中联接件2128的操作进行了说明。
[从主组件驱动轴释放联接件]
如图115的部分(d)所示,拆卸锥形表面(倒角形状)2173f在插入方向上设置在驱动力接收部2173a的下游侧,主组件侧拆卸锥部(倒角形状)2210i设置在主驱动轴2210的驱动传递凹槽2210a的自由端侧。由此,随着盒7沿箭头方向被拉出,拆卸锥形表面2173f和主组件侧拆卸锥部2210i变为彼此接触。当盒7进一步沿箭头方向拉动时,接合部件2173变形,使得安装锥形表面2173e利用其回弹以根部2173b作为支点顺应主组件侧拆卸锥部2210i。接合部件2173变形,使得驱动力接收部2173a沿感光鼓1的径向向外移动。当盒7沿箭头方向进一步被拉出时,主组件驱动轴2210和接合部件2173变为彼此脱离接触,并且接合部件2173的变形状态被解除,使得驱动力接收部2173a恢复初始位置。
如上所述,通过使驱动力接收部2173a径向向外移动,可以在不使用用于使主组件驱动轴2210沿轴向回缩的机构的情况下进行安装和拆卸以及驱动传递。
关于接合部件2173的厚度,优选满足以下条件。为了使接合部件2173稳定地接收驱动力,期望接合部件2173具有厚度为0.1mm以上的部分,更优选地为0.2mm以上的部分。特别地,期望设置有驱动力接收部2173a的部分的附近(接合部件2173的第一部分)具有上述厚度。
为了在联接件2128联接到主组件驱动轴2210以及从其脱开时使接合部件2173平滑地变形,优选地,接合部件2173具有直径为0.7mm以下的部分,更优选地为0.5mm以下。特别地,优选的是接合部件2173变形处的根部2173b附近(接合部件2173的第二部分)的厚度在上述范围内。
接合部件2173的厚度不必是恒定的,并且厚度可以在驱动力接收部和变形部之间变化。
在接合部件2173形成为具有恒定厚度的情况下,期望上述优选厚度的上限和下限两者都满足。
<实施例20>
参考图116,将描述根据本实施例的盒和电子照相成像设备。与上述实施例中的元件对应的元件用相同的名称表示,并且在某些情况下可以省略与上述元件相同点的说明。将主要对与上述元件的不同之处进行描述。
在实施例19中,驱动力接收部2173a如下布置。也就是说,如图114所示,当在垂直于感光鼓1轴线的横截面中沿着驱动力接收部2173a的表面引出直线(图114中的虚线)时,此线通过感光鼓1的轴线(中心)。
也就是说,设置有驱动力接收部2173a的第一部分基本上沿着法兰部件的径向延伸。换句话说,设置有驱动力接收部2173a的金属板部件213的第一部分沿着与圆周大致垂直的方向延伸。
另一方面,在本实施例中,如图116所示,驱动力接收部2273a的径向外侧相对于径向内侧设置在旋转方向的下游侧。也就是说,在本实施例的接合部件2273中,驱动力接收部2273a的延伸方向相对于径向倾斜。
此外,主组件驱动传递轴2310的驱动传递凹槽2310a具有与驱动力接收部2273a对应的形状。驱动传递凹槽2310a相对于径向倾斜。
由此,当驱动力F221从主组件驱动轴2310施加到驱动力接收部2173a时,驱动力接收部2273a产生反作用力F222。反作用力F222在垂直于分力F22h的方向上包括分力F22v,分力F22h在与驱动力接收部2273a平行的方向上。在这些分力中,分力F22h将向内拉动驱动力接收部2273a。
结果,接合部件2273的第二抵接部2273d可以稳定地抵接法兰部件2270的第二壁表面部2270h。结果,可以稳定地驱动感光鼓1。
<实施例21>
参考图118、图119和图120,将描述盒和电子照相成像设备。与实施例19中的元件对应的元件用相同的名称表示,并且在某些情况下可以省略与上述元件相同点的描述。将主要对与上述元件的不同之处进行描述。
在实施例19中,内周面2171b用于支撑主组件驱动轴2210。利用该结构,图117示出了当主组件驱动轴2210和感光鼓1的轴线变为倾斜时的横截面。如图117所示,当两轴线倾斜时,它们之间的交点位于主组件驱动轴2210由法兰部件支撑的区域(被支撑部)的中心点I。
图117示出了当主组件驱动轴2210和感光鼓1的轴线在该结构中倾斜时在驱动力接收部2173a的位置处的横截面。两轴线的交点位于主组件驱动轴2210由法兰部件2170支撑的区域的中心点I。因此,在感光鼓1的轴向上远离中心点I的驱动力接收部2373a中,主组件驱动轴2210的旋转中心和联接件10的旋转中心彼此偏离。因此,通过主组件驱动轴2210驱动的驱动半径根据主组件驱动轴2210的相位而变化,例如可以从图117的部分(a)和部分(b)中所示的R231和R232理解。由此,主组件驱动轴2210的旋转驱动不能以稳定的方式传递到感光鼓1。
在这种情况下,在该实施例中,如图118所示,驱动力接收部2373a的安装方向下游侧相对于安装方向上游侧设置在感光鼓1旋转方向的上游侧。此外,设置有抵接面(抵接部)2377d,其与驱动力接收部2373a的安装方向下游侧抵接。抵接面2377d是通过接触主组件驱动轴2210来确定法兰部件2370相对于主组件驱动轴2210的位置的部分。
此外,如图119所示,主组件驱动轴2410由法兰部件2370的支撑部2370i支撑的区域在感光鼓1的轴向上布置在与驱动力接收表面2373a相同的位置上。
将对驱动力接收部2373a的安装方向下游侧相对于驱动力接收部2373a的安装方向上游侧设置在感光鼓1旋转方向的上游侧,以及抵接面2377d相对于安装方向配置在下游侧的结构的效果进行说明。
如图118所示,当主组件驱动轴2410将驱动力F23传递到驱动力接收部2373a时,在驱动力接收部2373a中产生反作用力F24。通过反作用力F234的平行于驱动力接收部2373a的水平方向分力f24h,把驱动力接收部2373a朝插入方向上游侧拉动。由于接合部件2373夹持在法兰部件2370和止动部件之间,联接件2328和感光鼓1被一体地朝插入方向上游侧拉动。如图119所示,抵接面2377d移动,直到抵接面2377d抵接主组件驱动轴2410的自由端的半球形2410c为止。因此,可以管制感光鼓1在成像设备主组件100A中的位置。
接下来,将对把支撑主组件驱动轴2410的支撑部2370i在感光鼓1的轴向上放置在与驱动力接收部2373a相同位置的效果进行描述。
当主组件驱动轴2410的轴线相对于感光鼓1的轴线倾斜时,主组件驱动轴2410以支撑部2370i为支点倾斜。在这种情况下,如果支撑部2370i和驱动力接收部2373a彼此靠近,那么即使主组件驱动轴2410倾转,主组件驱动轴2410相对于驱动力接收部2373a的移动距离也能减小。也就是说,对驱动力接收部2373a和主组件驱动轴2410之间接合状态(接触状态)的影响得以减小。
这使得可以最大程度减小如图117所示驱动力接收部2373a的旋转半径根据主组件侧驱动轴相位而不同的现象。
如上所述,主组件驱动轴2410的驱动可以更稳定地传递到感光鼓1。
<实施例22>
参考图122至图131,将描述实施例22。
在该实施例中,联接件设置有用于限制驱动力接收表面(驱动力接收部)2473a在联接件的周向(联接件的旋转方向)上移动的撑靠部。
与上述实施例(特别是实施例1)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
图122是根据实施例22的联接件2438的剖视图。
图123是根据实施例22的联接件2428的剖视立体图。
图124是沿着垂直于联接件2428旋转轴线的平面并且包括基部2474的直线部2474p的位置截取的根据实施例22的联接件2428的剖视图。
图125是沿着垂直于旋转轴线并且包括驱动力接收表面2473a的平面截取的根据实施例22的联接件2428和主组件驱动轴101的剖视图。
图126是根据实施例22的对准部件2433的立体图。
图127是根据实施例22的将联接件2428安装到主组件驱动轴101的操作的说明性剖视图。
图128是根据实施例22的将联接件2428安装到主组件驱动轴101的操作的说明性剖视图。
图129是从Z方向的内侧观察的根据实施例22的法兰部件2470的图示。
图130是根据实施例22的联接件2438的剖视图。
图131是示出了根据实施例22将对准部件2433组装到法兰部件2470的立体图。
在实施例1中,切除部71d设置在圆筒部71中,基部74具有从圆筒部71延伸的形状,以及接合部73和基部74布置成在感光鼓1轴向上的感光鼓1外侧(Z1方向的下游侧)。另一方面,在本实施例中基部2474的根部2474a设置在感光鼓1的外侧(Z1方向的下游侧),在下文中将详细描述结构。此外,接合部2473在Z方向上设置在安装部2472的内周2472h内,即在感光鼓1内部(如图122所示)。也就是说,当联接件2428组装到感光鼓1上时,驱动力接收表面2473a设置在与感光鼓1抵接的凸缘部2475的端面2475b的后侧(Z2方向侧)。
[联接件的结构]
联接件2428通过组合法兰部件2470和对准部件2433这两个部件而构成(如图122和图123所示)。
(法兰部件的说明)
如实施例1那样,接合部2473在法兰部件2470的周向上以等间隔布置在三个位置处(120度间隔,基本上等间隔)。类似地,在法兰部件的周向上也以等间隔布置三个基部2474(图124的部分(a))。
此外,接合部2473设置有驱动力接收表面2473a、接触表面2473h、被撑靠表面2473i和锥部2473f(如图122和图124的部分(a)所示)。
接触表面2473h是当与主组件驱动轴101接合时联接件2428与轴部101f接触的表面,并且构成内径的圆弧的半径R241基本上与轴部101f的半径R2相同。
被撑靠表面2473i是与下文将要描述的对准部件2433的撑靠部2433j的撑靠表面2433t抵接的表面,并且相对于旋转方向设置在驱动力接收表面2473a的下游侧(如图124所示)。如图125所示,形成在被撑靠表面2473i和驱动力接收表面2473a之间的角度J是锐角。
如图122和图123所示,锥部2473f具有设置在接合部2473的外径侧上的锥形形状。
如图122和图123所示,基部2474具有直线部2474p和连接部2474q。
直线部2474p具有沿感光鼓1的轴向延伸并设置在法兰部件2470的圆筒部2471中的切除形状2471d。
连接部2474q是在相对于笔直部2474p形成角度的同时把接合部2473和直线部2474p彼此连接起来的部分。
类似于实施例1,当联接件2428安装到主组件驱动轴101上时,基部2474弹性变形,从而使接合部2473沿轴部101f的径向向外移动。基部2474弹性变形的方向基本上垂直于被撑靠表面2473i。更具体地,如图124的部分(b)所示,根部2474a设置成相对于平行于被撑靠表面2473i且穿过法兰部件2470旋转中心的直线基本上对称。
(对准部件的说明)
如图122和图126所示,对准部件2433包括倒锥形2433a、撑靠部2433s、装配部2433b、锁止部2433c和用于匹配法兰部件2470相位的凸部2433d。
类似于实施例5中描述的倒锥形533a,倒锥形2433a是大致圆锥形的凹部,并且其功能与实施例5中描述的倒锥形533a相同。
如实施例5那样,对准部件2433的装配部2433b装配在法兰部件2470中以满足以下条件。也就是说,在Z方向上,在主组件驱动轴101的半球形101c与抵接部2433e接触的状态下,半球形101c的中心101h处于驱动力接收表面2473a的范围内。
此外,锁止部2433c具有防止从法兰部件2470脱离的功能。
如上所述,撑靠部2433s设置有与法兰部件2470的被撑靠表面2473i接触的撑靠表面2433t。
如图123和图130所示,在本实施例中,撑靠表面2433t布置成在Z方向上与驱动力接收表面2473a重叠,但优选将其配置成使得至少部分地重叠。
如图130所示,相对于抵接部2433e而言,装配部2433b设置在感光鼓单元30的内侧(Z2方向的下游侧)。此外,法兰部件2470在与装配部2433b相对应的位置处具有被装配部2472a。
此外,如图122和图123所示,法兰部件2470具有对应于锁止部2433c的钩挂部2472b。如图129所示,钩挂部2472b设置的位置从Z方向观察时不与基部2474重叠。
钩挂部2472b大体设置在沿周向彼此相邻布置的两个根部2474a的中间。在本实施例中,与锁止部2433c接合的三个钩挂部2472b设置在根部2474a的中间。
如图131所示,法兰部件2470和对准部件2433在联接件2428旋转方向上的定位是通过将对准部件2433的凸部2433d装配到法兰部件2470的切除部2472c中实现的。凸部2433d具有从装配部2433b向径向外侧突出的形状。因此,当对准部件2433安装到法兰部件2470时,锁止部2433c和钩挂部2472b的相位可以容易地匹配。
[将联接件接合到主组件驱动轴的过程]
接下来,将详细描述联接件2428和主组件驱动轴101之间的接合过程。
图127是示出将联接件安装到主组件驱动轴的操作的剖视图。图127的部分(a)是示出联接件2428开始与主驱动轴101接合的状态的图示。图127的部分(e)示出了以下状态,其中,盒7已经安装到成像设备主组件100A,盒门104已经关闭,下部前侧盒引导件109已经升起,并且盒7已经相对于成像设备主组件100A定位。图127的部分(a)和图127的部分(e)之间的图127的部分(b)至图127(d)是将联接件2428连接到主组件驱动轴101的过程的图示。如在实施例1中那样,主组件驱动轴101由于其自重而以小角度沿重力方向向下悬垂。
图128的部分(a)是主组件驱动传递凹槽101a和接合部2473(驱动力接收表面2473a)的相位彼此不对准的状态的图示。也就是说,在图128的部分(a)中,接合部2473(驱动力接收表面2473a)不进入主组件驱动传递凹槽101a,它们不彼此接合。
类似于实施例1,相对于盒7相对于成像设备主组件100A定位的状态(图127的部分(e)所示)而言,如图127的部分(a)所示,联接件528以倾斜方式插到主组件驱动轴101上。该倾斜度为约0.5至2度。
首先,如图127的(b)所示,法兰部件2470的圆筒部2471的内周面2471b的自由端抵接主组件驱动轴101的粗略引导部101g。如图所示,主组件驱动轴101配置成以悬臂的方式由支承部101d支撑。因此,在主组件驱动轴101的粗略引导部101g与联接件2470的内周面2471b相配合的状态下,将联接件7插到主组件驱动轴101上。类似于实施例1,在Z方向上,接合部573的驱动力接收表面2473具有长度L2,其满足L1>L2,其中,L1是从圆筒部2471的前端面到接合部2473的前端面的距离(如图122所示)。因此,在主组件驱动轴101的自由端处的半球形101c碰撞接合部2473之前,主组件驱动轴101的粗略引导部101g沿联接件2470的内周面2471b而行。
由此,主组件驱动轴101由联接件2428引导。因此,可以防止主组件驱动轴101的自由端处的半球形部101c抵接接合部2473的非预期部位并防止对接合部2473施加冲击。也就是说,可以保护接合部2473和基部2474。
如图127的部分(c)所示,当联接件2428进一步朝向主组件驱动轴101的后侧插入时,接合部2473的插入锥形表面2473d和主驱动轴101的半球形101c彼此抵接。由于插入锥形表面2473d的倾斜表面和半球形101c的球形形状,主组件驱动轴101基本上被引导到三个接合部2473的中心。
当联接件2428进一步插入到主组件驱动轴101上时,基部2474径向向外弹性变形,使得接合部2473顺应半球形101c。结果,如图128的部分(a)所示,接合部2473移动(缩回)到主组件驱动轴101的轴部101f的外径表面。
通过此运动,如图127的部分(d)所示,联接件2428安装到主组件驱动轴101,直到接合部2473的拆卸锥形表面573e在Z方向上比主组件驱动轴101的主组件侧拆卸锥部101i更深。
此时,连接部2474q与笔直部2474p成角度,因此连接部2474q不与安装部2472的内周2472h发生干扰,并能够使接合部2473移动(缩回)到轴部101f的外径。
类似地,由于接合部2473具有锥部2473f,接合部2473不与安装部2472的内周2472h发生干扰,并且能够使接合部2473移动(缩回)到轴部101f的外径。
总而言之,由接合部2473和基部2474构成的支撑部具有从固定端朝向自由端远离联接件内表面(内周2472h)的部分(从而使距离变宽)。也就是说,锥部2473f和连接部2474q。锥部2473f和连接部2474q是倾斜表面(倾斜部),但也可以具有台阶形状。
之后,与实施例1类似,抬起盒7,使得盒7的鼓单元轴承部件39L抵接前侧盒定位部110。通过如此抬起盒7,盒7相对于成像设备主组件100A定位(如图21的部分(d)所示)。通过盒7的此种操作消除了联接件2428的倾斜,如图127的部分(e)所示。也就是说,联接件2428和鼓单元处于能够成像的姿态。
如图128的部分(b)所示,当主组件驱动轴101旋转时,主组件驱动传递凹槽101a和接合部2473变成具有相同的相位。结果,消除了基部2474的弹性变形,接合部2473的一部分进入主组件驱动传递凹槽101a,并且联接件2428和主组件驱动轴101彼此接合。
当主组件驱动传递凹槽101a和接合部573的相位彼此对准时,基部2474的至少一部分弹性变形在图127的部分(d)的阶段消除,并且成为图128的部分(b)的状态。也就是说,当从图128的部分(a)所示的状态变到图128的部分(b)所示的状态时,基部2474变形以便使得接合部2473沿径向向内移动。严格地说,通过接合部2473至少沿径向向内移动,至少部分地恢复了已经沿径向向外变形的基部2474的状态。
以此方式,基部2474使接合部2473进入到主组件驱动传递凹槽101a中,并且使接合部2473与主组件驱动轴101的主组件驱动传递凹槽101a接合。
[通过主组件驱动轴驱动联接件]
参考图51至图57,将描述从主驱动轴101到联接件2428的旋转驱动传递。
如上所述,在关闭了安装有盒7的成像设备主组件100A的盒门104之后,主组件驱动轴101旋转。结果,接合部2473的相位和主组件驱动传递凹槽101a的相位彼此匹配,结果是图128的部分(b)所示的状态。主组件驱动轴101配置成能够沿用于成像操作的旋转方向以及沿相反方向旋转。
此外,当主组件驱动轴101旋转时,如图125所示,主组件驱动传递表面101b抵接驱动力接收表面2473a。结果,主组件驱动轴101的旋转驱动力通过联接件2428传递到感光鼓1。
与实施例1一样,驱动力接收表面2473a围绕法兰部件2470的旋转轴线的中心扭转。扭转方向使得驱动力接收表面2473a的在感光鼓单元30的外侧(Z1方向侧)相对于内侧(在Z2方向的下游侧)位于感光鼓1旋转方向上游(如图129所示)。
如上所述,形成在被撑靠表面2473i和驱动力接收表面2473a之间的角度J是锐角。结果,如图125所示,当在驱动力接收表面2473a上接收驱动力F1时,沿着被撑靠表面2473i产生在朝向主组件驱动轴101侧的方向上的分力Fh24。当接合部2473被拉向主组件驱动轴101侧时,抵接面2473h与轴部101f接触。
由此,对于联接件2428的接合部2473,分别地,被撑靠表面2473i抵接撑靠表面2433t,接触表面2473h抵接轴部101f,以及驱动力接收表面2473a抵接主组件驱动传递凹槽101a。通过该抵接,联接件2428可以使感光鼓1与主组件驱动轴101一体地旋转。
被撑靠表面2473i是设置在撑靠表面2433t上的被推压部。当驱动力接收表面(驱动力接收部)2473a试图沿联接件的旋转方向移动时,撑靠表面2433t与撑靠表面2433t接触以限制其移动。此外,通过将驱动力接收表面2473a朝向驱动传递凹槽内侧(径向向内)推,撑靠表面2433t稳定了主组件驱动轴101和接合部2473之间的接合状态。
[从主组件驱动轴移除联接件]
关于联接件2428从主组件驱动轴101的移除操作,与实施例1类似,使用设置在接合部2473上的拆卸锥形表面2473e(图129所示)和主组件侧拆卸锥部101i。
此外,在本实施方式中,支撑驱动力接收部(驱动力接收表面2473a)的支撑部的固定端(基部2477的固定端)在轴向上配置在驱动力接收部的外侧。换句话说,驱动力接收部在轴向上设置在固定端内侧。
当驱动力接收表面2473a在轴向上设置在内侧时,提供了以下效果。通过将驱动力接收表面2473a设置在鼓单元的后部,可以保护驱动力接收表面2473a。
此外,当盒安装在成像设备主组件中时,即当联接件2428与主组件驱动轴101联接时,轴向向内的力被施加到驱动力接收表面2473a。此时,施加到用于支撑驱动力接收表面2473a的支撑部(接合部2473和基部2477)的力是拉力。通常,与承受施加在压缩方向上的力相比,支撑部更能耐受拉力。因此,即使用户将盒强力地安装到成像设备主组件上从而对支撑部施加强的拉力,也可以抑制支撑部的变形等。
<实施例23>
参考图132至图134,将描述实施例23。
与上述实施例(特别是实施例22)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
图132是根据实施例23的联接件2528的剖视立体图。
图133是沿着垂直于联接件2528的旋转轴线的平面并且包括基部2574的直线部2574p的位置截取的根据实施例23的联接件2528的剖视图。
图134是根据实施例23的联接件2538的剖视图。
在实施例22中,形成在被撑靠表面2273i和驱动力接收表面2273a之间的角度J是锐角。另一方面,在本实施方式中,驱动力接收表面2573a和被撑靠表面2573i布置成大致彼此平行。在垂直于法兰部件2570轴线的方向上的横截面中观察驱动力接收表面2573a时,被撑靠表面2573i设置成使得驱动力接收表面2573a和被撑靠表面2573i至少具有彼此平行的表面。
与实施例22一样,接合部2573设置有驱动力接收表面2573a、被撑靠表面2573i和锥部2573f(图132所示)。
此外,如实施例22所示,基部2574具有直线部2574p和连接部2574q,如图132所示。
如实施例22那样,基部2574弹性变形的方向是与被撑靠表面2573i大致垂直的方向。更具体地,如图133的部分(b)所示,相对于平行于被撑靠表面2573i且穿过法兰部件2570旋转中心的直线而言,根部2574a设置成基本上对称。
在该实施例中,如图134所示,撑靠表面2533t设置成在Z方向上与驱动力接收表面2273a的一部分重叠。
在接收到驱动力F1时,与实施例22相反,在接合部2573中不产生朝向主组件驱动轴101侧的分力。然而,被撑靠表面2573i与撑靠表面2533t接触,接触表面2573h与轴部101f接触,以及驱动力接收表面2573a与主组件驱动传递表面101b接触。通过这些接触,接合部2573夹持在撑靠表面2533t和相对的驱动传递表面101b之间。因此,只要施加到感光鼓1的负荷足够小,则联接件2528可以将感光鼓1与主组件驱动轴101一体地稳定旋转。
<实施例24>
参考图135至图141,将描述实施例24。
与上述实施例(特别是实施例22)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
图135是根据实施例24的圆筒形内部部件2640的立体图。
图136是根据实施例24的圆筒形内部部件2640的剖视图。
图137是沿着垂直于联接件2628旋转轴线的平面并且包括基部2674的直线部2674p的位置截取的根据实施例24的联接件2628的剖视图。
图138是示出了根据实施例24的将圆筒形内部部件2640组装到法兰部件2670的立体图。
图139是根据实施例24的联接件2628的剖视图。
图140是根据实施例24的联接件2628的剖视立体图。
图141是示出了根据实施例24圆筒形内部部件2640相对于法兰部件2670运动的剖视图。
在实施例22中,联接件2238包括法兰部件2270和对准部件2233。特别地,接合部2273和基部2274与法兰部件2270一体形成。然而,在本实施例中,如图138所示,联接件2638包括法兰部件2670和圆筒形内部部件2640,如在下文中将详细描述的。
通过将圆筒形内部部件2640在法兰部件2670轴向上从前侧到后侧(从Z1侧到Z2侧)安装到法兰部件2670上而组装联接件2638(在图138中示出)。
(圆筒形内部部件的说明)
如图135和图136所示,圆筒形内部部件2640包括装配部2640a、固定部2640b、接合部2673和基部2674。接合部2673设置有用于从主组件侧驱动传递轴101接收驱动力的驱动力接收部(驱动力接收表面2673a)。
圆筒形内部部件2640是具有驱动力接收部的驱动力接收部件。圆筒形内部部件2640可以在联接件的周向上相对于法兰部件2670运动。更具体地,圆筒形内部部件2640配置成可以围绕联接件的轴线Ax在一定角度范围内相对于法兰部件2670转动。
装配部2640a的外周面可旋转地装配到下面将要描述的法兰部件2670的圆筒部2671的内周面2671b上。
如图135和图136所示,固定部2640b设置在卡扣配合形状2640c的自由端侧处并且具有向装配部2640a的外周突出的形状,该卡扣配合形状设置在装配部2640a的一部分上。固定部2640b通过进入设置在下面将要描述的法兰部件2670的圆筒部2671中的固定孔2671e来限制圆筒形内部部件2640在轴向(Z方向)上的移动。
类似于实施例22,接合部2673设置有驱动力接收表面2673a、接触表面2673h、被撑靠表面2673i和锥部2673f。
锥部2673f是倾斜部,其倾斜成距联接件的内表面(法兰部件2670的内表面)的距离在轴向上朝向接合部2673前端侧变宽。
形成在驱动力接收表面2673a和被撑靠表面2673i之间的角度J也如实施例22那样是锐角(图135、图136和图137所示)。
类似于实施例22,基部2674还设置有笔直部2674p和连接部2674q(如图135和图136所示)。如实施例22那样,基部2674弹性变形的方向是与被撑靠表面2673i大致垂直的方向。更具体地,如图137的部分(b)所示,根部2674a设置成相对于平行于被撑靠表面2673i且穿过法兰部件2670旋转中心的直线基本上对称。在本实施例中,由于装配部2640a装配到法兰部件2670的圆筒部2671,法兰部件2670的旋转中心和装配部2640a的圆筒中心大致相同。
(法兰部件的说明)
如图138和图139所示,法兰部件2670具有圆筒部2671、安装部2672、凸缘部2675、倒锥形2633a和撑靠部2633s。
圆筒部2671设置有沿周向伸长的固定孔2671e,以供设置在圆筒形内部部件2640中的固定部2640b进入(如图138所示)。
类似于实施例22,当联接件2638联接到主组件驱动轴101时,接合部(驱动力接收部)通过基部2674的弹性变形而在法兰部件2670的径向上向外移动。此时,设置有释放孔2671f,以便不干扰圆筒形内部部件2640的基部2674弹性变形。
(联接件的说明)
如上所述,通过将圆筒形内部部件2640组装到法兰部件2670而构成联接件2638。通过将装配部2640a装配到圆筒部2671的内周面2671b来确定圆筒形内部部件2640相对于法兰部件2670的位置。
如图141所示,圆筒形内部部件2640可旋转地组装到法兰部件,直到接合部2673在接合部2673旋转方向的上游侧和下游侧抵接撑靠部2633s为止。固定孔2671e具有沿周向伸长的形状,使得在其自身与固定部2640b之间沿旋转方向设置有间隙(图138所示)以允许旋转。
即使在接合部2673抵接上游侧或下游侧撑靠部2633s的状态下当联接件2638与主组件驱动轴101联接时,释放孔2671f也能有效地避免干涉基部2674径向向外缩回。
并且,与接合部2673的被撑靠表面2673i接触的在旋转方向下游侧的撑靠部2633s的表面用作撑靠表面2633t,并且在它们之间接触时被撑靠表面2673i与其顺应。
利用上述结构,当联接件2638开始从主组件驱动轴101接收驱动力时,支撑部2633t和被撑靠表面2673i不必彼此相位对准。
由于圆筒形内部部件2640相对于法兰部件2670可旋转地被支撑,所以当开始接收驱动力时圆筒形内部部件2640相对于法兰部件2670旋转。之后,圆筒形内部部件2640旋转到被撑靠表面2673i抵接撑靠表面2633t为止。
被撑靠表面2673i接触撑靠表面2633t,由此传递驱动力。换句话说,被撑靠表面2673i是驱动力的被传递部。
法兰部件2670设置有撑靠部(撑靠表面2673i),并且是与驱动力接收部件(圆筒形内部部件2640)分开形成的撑靠部件。如果圆筒形内部部件2640和法兰部件2670是分离的部件(非一体部件),则容易缩短设置在圆筒形内部部件2640上的被撑靠表面与法兰部件2670的撑靠表面之间的距离,因此增强撑靠表面的功能。
此外,法兰部件2670是驱动力从驱动力接收部件传递到其上的被传递部件,并且是驱动力通过被撑靠表面2673i从圆筒状内部部件2640传递到其上的被传递部件。由于法兰部件2670固定在感光鼓1上,因此感光鼓1通过法兰部件2670所接收的力进行旋转。
如实施例22那样,形成在驱动力接收表面2673a和被撑靠表面2673i之间的角度J是锐角。因此,与实施例22的情况相同,在被撑靠表面2673i与撑靠表面2633t接触后,沿着被撑靠表面2673i朝向主组件驱动轴101侧的分力Fh22被施加到接合部2673。
也就是说,被撑靠表面(被撑靠部,被传递部)2673i倾斜,以便当与撑靠表面(推压部)2633t接触时至少径向向内(朝向驱动传递凹槽内部)推压驱动力接收部2673a。
在该实施例中,与实施例22类似,联接件2628也可以使感光鼓1与主组件驱动轴101一体地旋转。
在本实施例中,接合部2673和基部2674的结构与实施例22的结构相同,但也可以采用与实施例23相同的结构。
<实施例25>
参考图142至图156,将描述实施例25。与上述实施例(特别是实施例6)的元件相对应的元件由相同的名称表示,并且可以省略与上述元件的相似点的描述。将主要对与上述元件的不同之处进行描述。
在上述每个实施例中公开的联接件是传递用于使感光鼓1旋转的驱动力的部件。相反,在该实施例中,联接件4028接收用于使显影辊和调色剂供给辊旋转的驱动力。
感光鼓1、显影辊4017和调色剂供给辊4020都是可旋转部件,配置成在显影剂(调色剂)承载在表面上的状态下旋转。
[电子照相成像设备的总体布置]
首先参照图142,对本实施例的电子照相成像设备(成像设备)的实施例的整体结构进行说明。
图142是本实施例的成像设备4100A的示意性剖视图。
如图142所示,成像设备4100A包括作为多个成像部的第一成像部SY、第二成像部SM、第三成像部SC和第四成像部SK,以用于形成各个颜色的图像,即黄色(Y)、品红色(M)、青色(C)和黑色(K)。在本实施例中,第一至第四成像部SY、SM、SC和SK沿大致水平方向成直线布置。
在该实施例中,各鼓盒4013(4013Y、4013M、4013C和4013K)和各显影盒4004(4004Y、4004M、4004C和4004K)的结构和操作基本相同,只是要形成图像的颜色彼此不同。因此,以下将省略Y、M、C和K并且将进行总括说明,除非另有指出。
在该实施例中,成像设备4100A具有各自具有感光层的圆筒(以下称为感光鼓)1,这些圆筒沿着相对于竖直方向略微倾斜的方向并排布置作为多个图像承载部件。扫描单元(曝光装置)3相对于重力方向设置在鼓盒4013和显影盒4004的下方。此外,在感光鼓1周围布置了充电辊2等,作为作用在感光层上的处理器件(处理装置、处理部件)。
充电辊2是用于对感光鼓1的表面进行均匀充电的充电器件(充电装置、充电部件)。扫描单元(曝光装置)3是通过基于图像信息用激光曝光而在感光鼓1上形成静电图像(静电潜像)的曝光器件(曝光装置、曝光部件)。在感光鼓1周围设置有作为清洁器件(清洁装置,清洁部件)的清洁刮板6和显影盒4004。
此外,作为中间转印部件用于将调色剂图像从感光鼓1转印到记录材料(片材、记录介质)12上的中间转印带5设置成面对四个感光鼓1。
在本实施例的显影盒4004中,采用接触显影方法,其中,使用非磁性单组分显影剂(以下称为调色剂)作为显影剂,并且,作为显影剂承载部件的显影辊4017与感光鼓1接触。
利用上述结构,将形成在感光鼓1上的调色剂图像转印到片材(纸张)12上,并且对转印到片材上的调色剂图像进行定影。作为作用在感光鼓1上的处理器件,鼓盒4013设置有用于对感光鼓1进行充电的充电辊2和用于除去感光鼓1上残留的未转印调色剂的清洁刮板6。未转印到片材12上并残留在感光鼓1上的未转印残留调色剂由清洁刮板6收集。此外,由清洁刮板6收集的残留调色剂从开口4014b收纳到去除显影剂容纳部(以下称为废调色剂容纳部)4014a中。废调色剂部4014a和清洁刮板6集成到鼓盒(感光部件单元、鼓单元、图像承载部件单元)4013中。
成像设备4100A的主组件框架上设有诸如安装引导件和定位部件(未示出)的引导件(定位器件)。显影盒4004和鼓盒4013由上述引导件引导,并且可安装到成像设备主组件4100A上和从其上拆卸。
黄色(Y)、品红色(M)、青色(C)和黑色(K)各颜色的调色剂容纳在用于各颜色的显影盒4004中。
中间转印带5接触每个鼓盒4013的感光鼓1,并沿图1中箭头B的方向旋转(移动)。中间转印带5围绕多个支撑部件(驱动辊51、二次转印对置辊52、从动辊53)缠绕。在中间转印带5的内周面侧,作为一次转印器件的四个一次转印辊8并置以面对每个感光鼓1。作为二次转印器件的二次转印辊9设置在中间转印带5的外周面侧面对二次转印对置辊52的位置。
在成像时,感光鼓1的表面首先由充电辊2进行均匀充电。然后,充电后的感光鼓1的表面由从扫描单元3发射的对应于图像信息的激光束进行扫描和曝光。由此,在感光鼓1上形成对应于图像信息的静电潜像。形成在感光鼓1上的静电潜像由显影盒4004显影成调色剂图像。通过一次转印辊8的操作,将形成在感光鼓1上的调色剂图像转印(一次转印)到中间转印带5上。
例如,当形成全色图像时,在四个鼓盒4013(4013Y、4013M、4013C、4013K)和四个显影盒4004(4004Y、4004M、4004C、4004K)中依次执行上述处理。形成在各鼓盒4013的感光鼓1上的各颜色的调色剂图像依次一次转印,以便在中间转印带5上叠加。之后,与中间转印带5的移动同步,记录材料12被传送到二次转印部。中间转印带5上的四色调色剂图像一起转印到传送到由中间转印带5和二次转印辊9构成的二次转印部处的记录材料12上。
已经转印有调色剂图像的记录材料12被传送到作为定影器件的定影装置10。通过在定影装置10中对记录材料12加热加压,调色剂图像定影在记录材料12上。此外,一次转印处理后残留在感光鼓1上的一次转印残留调色剂被清洁刮刀6除去并被收集作为废调色剂。此外,二次转印步骤后残留在中间转印带5上的二次转印残留调色剂被中间转印带清洁装置11除去。
成像设备4100A还能够使用所需的单个或一些(不是全部)成像部来形成单色或多色图像。
[处理盒的总体布置]
参考图143、图144、图145和图146,将描述本实施例中可安装到成像设备主组件4100A的鼓盒4013(4013Y、4013M、4013C、4013K)和显影盒4004(4004Y、4004M、4004C、4004K)的总体布置。
鼓盒4013Y、鼓盒4013M、鼓盒4013C和鼓盒4013K具有相同的结构。此外,容纳黄色调色剂的显影盒4004Y、容纳品红色调色剂的显影盒4004M、容纳青色调色剂的显影盒4004C和容纳黑色调色剂的显影盒4004K具有相同的结构。因此,在下面的描述中,每个鼓盒4013Y、4013M、4013C和4013K统称为鼓盒4013,以及每个显影盒4004Y、4004M、4004C和4004K统称为显影盒4004。也将以相同的方式统述各个盒构件。
图143是鼓盒4013的外部立体图。这里,如图143所示,感光鼓1的旋转轴线的方向被定义为Z方向(箭头Z1、箭头Z2),图142中的水平方向为X方向(箭头X1、箭头X2),竖直方向是图142中的Y方向(箭头Y1、箭头Y2)。
鼓单元轴承部件4039R和4039L分别安装到清洁框架4014的两侧,并且支撑感光鼓单元4030。由此,感光鼓单元4030被支撑成可相对于清洁框架4014旋转。
此外,充电辊2和清洁刮板6安装到清洁框架4014,并且它们布置成与感光鼓1的表面接触。充电辊轴承15安装在清洁框架4014上。充电辊轴承15是用于支撑充电辊2的轴的轴承。
这里,充电辊轴承15(15R、15L)安装成可沿图144所示的箭头C的方向移动。充电辊2的旋转轴2a可旋转地安装在充电辊轴承15(15R、15L)上。通过作为推压器件的加压弹簧16把充电辊轴承15朝向感光鼓1推压。结果,充电辊2抵接感光鼓1并被感光鼓1带动旋转。
清洁框架4014设置有作为清洁器件的清洁刮板6,用于去除残留在感光鼓1的表面上的调色剂。通过把抵接感光鼓1以去除感光鼓1上调色剂的刮板状橡胶(弹性部件)6a和支撑刮板状橡胶(弹性部件)6a的支撑金属板6b一体化而形成清洁刮板6。在本实施例中,利用螺丝把支撑金属板6b固定在清洁框架4014上。
如上所述,清洁框架4014具有开口4014b,用于收集由清洁刮板6收集的转印残留调色剂。开口4014b设置有与感光鼓1接触并且在感光鼓1和开口4014b之间进行密封的防喷板26,以防止调色剂在开口4014b的上部泄漏。
图145是显影盒4004的外部立体图。
显影盒4004包括用于支撑各种元件的显影框架4018。在显影盒4004中,设置有显影辊4017作为显影剂承载部件,其与感光鼓1接触地沿图5所示的箭头D的方向(逆时针方向)旋转。通过纵向(旋转轴线方向)两端部处的显影轴承4019(4019R、4019L),显影辊4017可旋转地由显影框架4018支撑。这里,显影轴承4019(4019R、4019L)分别安装在显影框架4018的两侧部。
此外,如图146所示,显影盒4004包括显影剂容纳室(以下称为调色剂容纳室)4018a和设置有显影辊4017的显影室4018b。
在显影室4018b中设置有:作为显影剂供应部件的调色剂供给辊4020,其接触显影辊4017并沿箭头E的方向旋转;以及作为显影剂管制部件的显影刮板21,用于管制显影辊4017的调色剂层。显影刮板21通过焊接等方式固定并集成到固定部件22。
用于搅拌所容纳的调色剂并将调色剂输送到调色剂供给辊4020的搅拌部件23设置在显影框架4018的调色剂容纳室4018a中。
[主组件驱动轴的结构]
参考图147和图148,将描述主组件驱动轴4101的结构。
图147是主组件驱动轴4101的外视图。
图148是沿着安装到成像设备主组件的主组件驱动轴4101的旋转轴线(旋转轴线)截取的剖视图。
如图147所示,主组件驱动轴4101包括齿轮部件4101e、中间部件4101p、输出部件4101q和驱动传递部件4101r。
作为驱动源的电机(未示出)设置在成像设备主组件4100A中。从该电机向齿轮部件4101e供应旋转驱动力,驱动力以中间部件4101p、输出部件4101q和驱动传递部件4101r的顺序传递,从而使得主组件驱动轴4101旋转。齿轮部件4101e、中间件4101p和输出部件4101q构成了Oldham联轴器机构,其中,在一定距离范围内可以在X方向和Y方向上移动。因此,通过Oldham联轴器而设置在主组件驱动轴4101的盒侧的驱动传递部件4101r也可以在X方向和Y方向上的一定距离范围内移动。驱动传递部件4101r设置有可旋转轴部4101f,并且从电机接收的旋转驱动力通过设置在轴部4101f中的凹槽形驱动传递凹槽4101a(凹部、驱动过渡部)传递到显影盒4004侧。此外,轴部4101f在其自由端处具有锥形形状4101c。
主组件驱动传递凹槽4101a具有的形状能使得下文将描述的接合部4073的一部分能够进入。具体来说,设置有主组件驱动传递表面4101b,作为与联接件4028的驱动力接收表面(驱动力接收部)4073a接触以传递驱动力的表面。
此外,如图147所示,主组件驱动传递表面4101b不是平表面,而是围绕主组件驱动轴4101的旋转轴线扭转的形状。扭转方向使得主组件驱动轴4101在Z1方向上的下游侧相对于在Z2方向的下游侧处于主组件驱动轴4101旋转方向上游。在本实施例中,沿着接合部4073的圆筒的旋转轴线方向的扭转量设定为约1度/1mm。在下文中将描述主组件驱动传递表面4101b扭转的原因。
此外,主组件侧拆卸锥部4101i设置于主组件驱动传递凹槽4101a的在Z2方向下游侧的表面上。当从设备主组件4100A上拆卸显影盒4004时,主组件侧拆卸锥部4101i具有有助于接合部4073从驱动传递凹槽4101a脱离的锥部(倾斜表面、倾斜部)。
如图148所示,设置在齿轮部件4101e上的被支撑部4101d可旋转地由设置在成像设备主组件4100A中的轴承部件4102支撑(轴向支撑)。输出部件4101q可旋转地由联接件保持部件4101s支撑。此外,驱动传递部件4101r由输出部件4101q支撑成能够在Z方向移动,并且通过弹簧部件4103将其朝向显影盒4004(Z2方向)推压。然而,驱动传递部件4101q在Z方向上的可动量(游隙)大约为1mm,其远小于下文中将描述的驱动力接收表面4073a在Z方向上的宽度。
另外,通过偏置弹簧4101t把联接件保持部件4101s朝大致Y2方向上推压。因此,如下文中将描述的,当安装显影盒4004时,驱动传递部件4101r相对于齿轮部件4101e的轴线处于在大致Y2方向上偏移的位置。
如上所述,驱动传递部件4101r设置有主组件驱动传递凹槽4101a并且联接件4028设置有接合部4073,以使得驱动从设备主组件4100A传递到显影盒4004。
如下文中将详细描述的那样,接合部4073设置在可弹性变形基部4074的自由端。因此,当显影盒4004安装到设备主组件4100A上时,接合部4073配置成可径向向外移动。通过这样做,随着显影剂盒4004插入设备主组件4100A中,接合部4073进入驱动传递凹槽4101a,并且接合部4073和主组件驱动传递凹槽4101a可以彼此接合。
[联接件的结构]
参考图149、图150、图151和图152,将详细描述本实施例的联接件4028。
图149是沿着垂直于联接件4028旋转轴线并且包括基部4074的平面截取的联接件4028的剖视图。
图150是从Z方向的外侧观察的圆筒部件4070的图示。
图151是对准部件4033的立体图。
图152是联接件4028的组装的图示。
如图149所示,联接件4028由两个部件即圆筒部件4070和对准部件4033组合构成。然而,根据材料和成型方法的选择,不是必须具有两个部件,可以是一体的或可以通过组合三个以上部件来构成。对准部件4033是用于确定联接件4028相对于驱动传递轴的位置的定位部件,也是驱动力从圆筒部件4070传递到的驱动力接收部件。
如图152所示,对准部件4033沿圆筒部件(驱动力接收部件)4070的轴向(由箭头指示)组装到圆筒部件4070。此外,通过使对准部件4033沿逆时针方向(如箭头所示)旋转,锁止部4033c与钩挂部4072接合而一体化。
(法兰部件的说明)
如图150所示,圆筒部件4070的基部4074包括根部4074a、卷绕部4074b以及笔直部4074c,该笔直部把根部4074a和卷绕部4074b直线连接起来。
设置在圆筒部件4070中的接合部4073至少在联接件4028的径向向内突出,以便与主组件驱动轴4101接合。接合部4073设置在基部4074的自由端处,并具有驱动力接收表面4073a。驱动力接收表面4073a是用于通过接触驱动传递凹槽4101a从主组件驱动轴4101接收驱动力的驱动力接收部。此外,接合部4073在联接件4028的周向上以等间隔设置在三个位置处(120度间隔,基本上等间隔)。类似地,基部4074也在圆筒部4071的周向上等间隔设置在三个位置处。基部4074在圆筒部4071中具有固定端,并且具有以固定端为支点弹性变形的形状。
也就是说,基部4074是至少在联接件4028的周向上延伸的延伸部(延长部,延展部)。此外,接合部4073是设置在基部4073的自由端处的突起部。基部4074和接合部4073是用于支撑驱动力接收表面4073a的支撑部。
接合部4073由可弹性变形的基部4074支撑,并且可以通过基部4074的变形而在联接件4028的径向上移动。换句话说,基部4074在接收外力时变形,并且在恢复到自然状态位置的方向上具有恢复力。
具体来说,当接合部4073与驱动传递部件4101r的外周面接触时,接合部4073弹性变形,使得接合部4073沿着驱动传递部件4101r的外周面在径向上向外侧移动。之后,当接合部4073与设置在驱动传递部件4101r的外周面上的主组件侧驱动传递凹槽4101a处于相同的位置(相同相位)时,接合部4073的弹性变形被解除。然后,接合部4073在径向上向内移动,使得接合部4073的一部分能够进入主组件驱动传递凹槽4101a。
从驱动稳定性的观点来看,优选在圆筒部件4070的周向上设置多个接合部4073。
联接件4028的驱动力接收表面4073a具有围绕联接件4028的轴线扭转的形状,并且在该实施例中扭转量设定为与主组件驱动传递表面4101b的扭转量相同。
只要驱动力接收表面4073a与驱动传递部件4101r接触的两个点在旋转方向上具有不同相位就行。也就是说,只要驱动力接收表面4073a具有与扭转表面相同的功能,则可以不必具有扭转形状。由于驱动力接收表面4073a具有扭转形状,所以当驱动力接收表面4073a接收到驱动力时联接件4028接收能被拉向显影盒4004外部(Z1方向)的力。
此外,如图149所示,接合部4073在Z方向上显影盒4004的外侧(Z1方向侧)上设置有作为安装力接收部的安装锥形表面4073d。此外,接合部4073在Z方向上在显影盒4004的内侧(Z2方向侧)上设置有作为拆卸力接收部的拆卸锥形表面4073e。由此,可以提高联接件4028相对于主驱动轴4101的安装性和拆卸性。
在安装时,安装锥形表面4073d和锥形形状4101c彼此接触,并且接合部4073沿着驱动轴的径向朝向外侧移动。此外,在拆卸时,拆卸锥形表面4073e和主组件侧拆卸锥部4101i彼此接触,并且接合部4073沿着主组件驱动轴4101的径向朝向外侧移动。
(制造方法说明)
如实施例5那样,在使用注塑成型制造的情况下,优选采用与实施例6一样的两件式结构。
类似于实施例5,插入锥部4073的端部和驱动力接收表面4073a的端部布置在Z方向上的相同位置处,并且接合部1473处的分型面为直的。
如实施例5那样,圆筒部件4070的根部4074a所设置处的部分的内径与其它部分的内径大致相同。
如实施例5那样,接合部4073和支撑部4074在将圆筒部件4070投影到与旋转轴线(Z方向)垂直的投影平面上不与其它部分重叠。
[法兰部件的嵌入成型]
只要安装性和驱动传递稳定,则可以适当地选择联接件4028的材料、形状和制造方法。特别地,当考虑到大批量生产率时,优选使用树脂材料(POM、PPS、PS、尼龙等)。
如实施例6那样,本实施例的圆筒部件4070通过嵌入成型由不锈钢制成的金属板而形成。
(对准部件的说明)。
如图151所示,对准部件4033具有定位部4033a。定位部4033a是用于确定主组件驱动轴4101的驱动传递部件4101r在轴向和径向上位置的部分。定位部4033a具有倒锥形曲面,其能够与驱动传递部件4101r的锥形形状4101c接触,使得驱动传递部件4101r在主组件驱动轴4101的轴向和径向上的移动受到限制。
[通过主组件驱动轴驱动联接件]
如上所述,类似于实施例1,驱动力接收表面4073a具有绕圆筒部件4070的旋转轴线中心扭转的形状。当驱动力接收表面4073a由主组件驱动轴4101驱动时,对准部件4033的倒锥形4033a可靠地与主组件驱动轴4101的自由端处的锥形形状4101c接触。
对准部件4033的倒锥形4033a抵接在主组件驱动轴4101的自由端处的锥形形状4101c,以抑制驱动传递部件4101r的轴线相对于圆筒部件4070的轴线的倾斜。关于圆筒部件4070和驱动传递部件4101r之间的轴心偏离,通过如上所述设置在设备主组件4100A中的Oldham机构可以减小对旋转的影响。
此外,当从主组件驱动轴4101施加驱动力时,卷绕部4074b围绕轴部4101f卷绕。因此,与实施例5类似,即使由圆筒部件4070接收的负荷发生变化,基部4074的变形量也较小,因此能够将变形对圆筒部件4070旋转的影响抑制到小的程度。
如图152所示,通过法兰驱动传递表面(传递部)4070m与对准驱动传递表面(被传递部)4033m之间的接合来从圆筒部件4070到对准部件4033传递驱动力。法兰驱动传递表面4070m和对准驱动传递表面4033m在圆筒部件4070和对准部件4033的周向上以等间隔布置在三个位置处(120度间隔,大致相等间隔)。此外,法兰驱动传递表面4070m和对准驱动传递表面4033m分别围绕圆筒部件4070和对准部件4033的轴线扭转,扭转量约为2度/1mm。当圆筒部件4070在驱动力接收表面4073a处接收朝向显影盒4004外侧(Z1方向)的力Fz1并且在法兰驱动传递表面4070m处接收朝向显影盒4004内侧(Z2方向)的力Fz2时,扭转量确定为始终满足Fz2>Fz1。因此,圆筒部件4070始终被朝Z2方向拉。此外,在法兰驱动传递表面4070m与对准驱动传递表面4033m之间的Z方向接合部D的至少一部分与根部4074a在Z方向上重叠,并且可以抑制圆筒部件4070的变形量。
此外,在该实施例中,如图153所示,驱动从对准部件4033传递到调色剂供给辊4020的轴,使得调色剂供给辊4020可以旋转。
也就是说,在该实施例中,联接件4028与调色剂供给辊4020的轴线同轴设置,并且被固定到调色剂供给辊4020的轴上。也就是说,对准部件具有安装部4033d,其具有D形开口(图151)。该安装部4033d装配到形成为D形的轴端部,并且联接件4028固定到调色剂供给辊4020。
当调色剂供给辊4020旋转时,驱动被传递到相对于Z1方向设置在调色剂供给辊4020轴线下游侧的调色剂供给辊齿轮4098。最后,驱动从调色剂供给辊齿轮4098传递到相对于Z1方向设置在显影辊4017轴线下游侧的显影辊齿轮4099,由此显影辊4020可旋转。
在该实施例中,从驱动传递部件4101r到法兰部件的驱动传递半径L2满足L2>L1,其中,L1是从对准部件4033到调色剂供给辊4020轴线的驱动传递半径L1。
也就是说,从驱动传递部(驱动传递表面4073a)到联接件4028轴线的最短距离比从安装部4033d到联接件轴线的距离长。
通过这样做,可以使施加到圆筒部件4070的驱动力接收表面4073a的力小于调色剂供给辊4020的轴的负荷扭矩,从而可抑制圆筒部件4070的变形量。
[将盒安装到成像设备主组件上]
参考图154和图155,将描述显影盒4004相对于成像设备主组件的安装和拆卸。
图154是示出将显影盒4004安装到成像设备主组件4100A的立体图。
图155是示出了显影盒4004到成像设备主组件4100A的安装操作的剖视图。
本实施例的成像设备主组件4100A采用了显影盒4004和鼓盒4013可沿水平方向安装的结构。具体而言,成像设备主组件4100A中包括可用来安装显影盒4004和鼓盒4013的空间。用于允许显影盒4004和鼓盒4013插入到空间中的盒门4104(前门)设置在成像设备主组件4100A的前侧(用户站立使用侧)。
如图154所示,成像设备主组件4100A的盒门4104设置成能够开闭。当盒门4104打开时,用于引导显影盒4004的下部盒导轨4105设置在空间的底部,并且上部盒导轨4106设置在上表面上。显影盒4004通过设置在空间上方和下方的上部导轨4105和下部导轨4106被引导到安装位置。显影盒4004基本上沿着显影辊4020的轴线插入安装位置。
参考图155,下面将描述显影盒4004到成像设备主组件4100A的安装和拆卸操作。
如图155的部分(a)所示,在插入方向后侧端部的下部被下部盒导轨4105支撑并引导以及在插入方向后侧端部的上侧由上部盒导轨4016引导的状态下把显影盒4004插入。存在的尺寸关系应使得中间转印带5不与显影框架4018或显影轴承4019接触。
如图155的部分(b)所示,显影盒4004在被下部盒导轨4105支撑的同时水平地插入,并且一直插入到抵接设置在成像设备主组件4100A中的后侧盒定位部4108为止。
当以这种方式安装显影盒4004时,在大致沿Y2方向被推压的同时,成像设备主组件4100A的驱动传递部件4101r与联接件4028接合。
图155的部分(c)是在盒门4104关闭的状态下成像设备主组件4100A和显影盒4004的状态的图示。成像设备主组件4100A的下部盒导轨4105配置为随着盒门(前门)4104的开闭而上下移动。
当用户关闭盒门4104时,下部盒导轨4105升高。然后,显影盒4004的两端部都与成像设备主组件4100A的盒定位部(4108、4110)接触,并且显影盒4004相对于成像设备主组件4100A定位。此外,成像设备主组件4100A的驱动传递部件4101r也跟随显影盒4004向上移动。
通过上述操作,显影盒4004到成像设备主组件4100A的安装完成。
此外,以与上述插入操作相反的顺序执行显影盒4004从成像设备主组件4100A的拆卸操作。
[将联接件接合到主组件驱动轴的过程]
参考图156,将详细描述联接件4028和主组件驱动轴4101的接合过程。
图156是示出了将联接件4028安装在主组件驱动轴4101上的操作的剖视图。
图156的部分(a)是联接件4028开始与驱动传递部件4101r接合的状态的图示。此外,图156的部分(d)示出了显影盒4004安装到成像设备主组件4100A上的状态。特别地,图156的部分(d)示出了下部盒导轨4105随着盒门4104关闭而升高的状态,并且显影盒4004相对于成像设备主组件4100A定位。
这里,图156的部分(b)和(c)是图156的部分(a)和部分(d)所示出的位置之间的联接件4028和驱动传递部件4101r的安装过程的图示。驱动传递部件4101r由推压弹簧4101t基本上沿Y2方向被推压,并且驱动传递部件4101r的轴线被推压到从联接件4028的轴线大致在Y2方向上偏移的位置。
如已经参考图155所描述的那样,显影盒4004在由成像设备主组件4100A的下部盒导轨4105支撑的同时水平地插入。
图156的部分(a)是驱动传递部件4101r未与联接件4028接触的状态的图示。如上所述,在该状态下,驱动传递部件4101r的轴线和联接件4028的轴线彼此偏离。因此,驱动传递部件4101r的锥形形状4101c与联接件4028的插入锥形表面4073d接触。
如图156的部分(b)所示,当联接件4028进一步从图156的部分(a)所示的位置朝向驱动传递部件4101r的后侧插入时,联接件4028的安装锥形表面4073d由驱动传递部件4101r的锥形形状部4101c引导,使得联接件4028的轴线和驱动传递部件4101r的轴线变成基本上对准。
如图156的部分(c)所示,当联接件4028进一步从图156的部分(b)的位置朝向驱动传递部件4101r的后侧插入时,联接件4028插入到驱动传递部件4101r,直到联接件4028的接合部4073的拆卸锥形表面4073e到达Z方向的背侧并超过驱动传递部件4101r的主组件侧拆卸锥部4101i。然后,联接件4028插入到驱动传递部件4101r,直到联接件4028的定位部4033a抵接驱动传递部件4101r的锥形形状4101c。
之后,如上所述,显影盒4004由下部盒导轨4105抬起,使得显影盒4004相对于成像设备主组件4100A定位(如图155的部分(c)所示)。此外,如图155的部分(d)所示,驱动传递部件4101r也随着显影盒4004向上移动而升高。
如上所述,随着显影剂盒4004安装到设备主组件4100A上,主组件驱动传递凹槽4101a和接合部4073可以彼此接合。因此,不需要移动主组件驱动轴4101以与联接件4028接合。也就是说,不需要在成像设备的设备主组件4100A中提供用于移动主组件驱动轴4101来使其与联接件4028接合的机构。
也就是说,不需要提供在将显影盒4004安装到成像设备主组件4100A之后用于移动主组件驱动轴4101使其与联接件4028接合的机构。
当显影盒4004安装到设备主组件4100A上时,联接件4028的接合部4073接触主组件驱动轴4101以径向向外缩回。接合部4073配置成通过径向向内移动而与主组件驱动轴4101的凹槽(主组件驱动传递凹槽4101a)接合。
这里,也可以是在联接件上设置用于接收驱动的凹槽,以及在主组件驱动轴4101侧设置通过沿径向移动而与凹槽接合的可动部。然而,与显影盒4004相比,成像设备主组件4100A需要具有更高的耐久性。从提高成像设备主组件4100A的耐久性的观点出发,优选地如本实施例那样在显影盒4004的联接件4028侧设置径向移动的可动部(接合部4073)。
本实施例的联接件4028的基部4074、接合部4073和驱动力接收表面4073a具有与实施例6的联接件628基本相同的形状。也就是说,本实施例的联接件4028是变例,其中,结构部分地改变,以使得实施例6的联接件628应用到显影盒(显影装置)4004。
然而,可用于显影盒4004的联接件不限于实施例6中公开的联接件628。除实施例6外的其它实施例中公开的联接件也可以用于显影盒4004。
最后,本申请中公开的代表性结构总结如下。在下文中,附图标记被添加到结构例中的一些元件,以指示与上述实施例中描述的元件的对应性。然而,这种对应性仅仅是作为参考的示例,并且下面描述的任何元件不限于上述实施例的元件的结构。
<<结构例A1>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓(1);以及
(II)设置在感光鼓上的联接件,联接件包括(II-I)驱动力接收部(273a、373a、473a、573a、673a、773a、873a、973a、1073a、1173a、1273a、1373a、1673a、2173a、2273a、2473a和2673a),其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部(273、274、372、374、473、474、573、574、673、674、773、774、873、874、973、974、1073、1074、1273、1274、1373、1374、1673、1674、2173、2273、2473、2474、2673和2674),其可移动地支撑驱动力接收部,
其中,支撑部包括(II-II-I)突出部(273、372、473、573、673、773、873、973、1073、1273、1274、1373、1374、1673、1674、2173、2273、2473、2474和2673),其设置有驱动力接收部,以及(II-II-II)延伸部(274、374、474、574、674、774、874、974、1074、1274、1374、1674、2173、2273、2474和2674),其沿与突出部的突出方向交叉的方向延伸,
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分设置在感光鼓(1)的内部。
<<结构例A2>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓(1);以及
(II)设置在感光鼓上的联接件,联接件包括(II-I)驱动力接收部(573a、673a、773a、873a、973a、1073a、1173a、1273a、1373a、1673a、2173a和2273a),其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部(573、574、673、674、773、774、873、874、973、974、1073、1074、1273、1274、1373、1374、1673、1674、2173和2273),其可移动地支撑驱动力接收部,
其中,支撑部包括(II-II-I)突出部(573、673、773、873、973、1073、1273、1274、1373、1374、1673、1674、2173和2273),其设置有驱动力接收部,以及(II-II-II)延伸部(574、674、774、874、974、1074、1274、1374、1674、2173、2273),其沿与突出部的突出方向交叉的方向以及至少在联接件的周向上延伸。
<<结构例A3>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;
(II)联接件,其设置在感光鼓上,
联接件包括:
(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部,其可移动地支撑驱动力接收部,以及
(II-II-I)其中,支撑部包括设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,
其中,驱动力接收部设置有倾斜部,其相对于驱动力接收部的移动方向倾斜。
<<结构例A4>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;
(II)联接件,其设置在感光鼓上,
联接件包括(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部,其可移动地支撑驱动力接收部;以及
(III)配置成可旋转地被支撑的被支承部,
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分设置在被支承部的内侧。
<<结构例A5>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;
(II)联接件,其设置在感光鼓上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部,其可移动地支撑驱动力接收部;以及
(III)配置成可旋转地被支撑的被支承部;
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,在支撑部、驱动力接收部和感光鼓投影到联接件的轴线上时,支撑部的投影范围和驱动力接收部的投影范围至少部分地与感光鼓的投影范围重叠。
<<结构例A6>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及支撑部,其具有自由端和固定端并且至少沿联接件的轴向延伸,支撑部可移动地支撑驱动力接收部,并且支撑部的至少一部分设置在联接件内部,
其中,支撑部包括设置有驱动力接收部的突出部,以及沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,联接件包括这样一部分,在该部分处,距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例A7>>
一种能够可拆卸地安装到成像设备主组件中的鼓单元,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,在支撑部、驱动力接收部和感光鼓投影到联接件的轴线上时,支撑部投影范围和驱动力接收部投影范围的至少一部分与感光鼓投影范围的至少一部分重叠。
<<结构例A8>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,驱动力接收部相对于联接件的轴向设置在支撑部的固定端内侧。
<<结构例A9>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部,其可移动地支撑驱动力接收部,以及(II-III)凹部,其相对于联接件的轴向设置在驱动力接收部内侧的位置处,
其中,联接件的凹部朝联接件轴向的外侧方向开口,并且向内侧收窄。
<<结构例A10>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,当沿着联接件轴线观察联接件时,支撑部与穿过支撑部自由端的驱动力接收部法线交叉。
<<结构例A11>>
根据结构例A8至结构例A10中任一项的鼓单元,其中,支撑部包括设置有驱动力接收部的突出部和沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例A12>>
一种能够可拆卸地安装到电子照相成像设备主组件的鼓单元,包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,
其中,联接件包括(II-I)驱动力接收部件,其包括(II-I-I)突出部,突出部设置有驱动力接收部,以用于接收用于旋转感光鼓的驱动力,以及(II-I-II)延伸部,其沿着与突出部的突出方向交叉的方向延伸;以及(II-II)用于从驱动力接收部件接收驱动力的被力传递部件,
其中,驱动力接收部件能够在联接件的周向上相对于被力传递部件移动。
<<结构例A13>>
一种能够可拆卸地安装到电子照相成像设备主组件的鼓单元,包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部件,以及
(II-II)撑靠部件,其与驱动力接收部件不是一体的;
其中,驱动力接收部件包括(II-I-I)突出部,其具有驱动力接收部,以用于接收用于旋转感光鼓的驱动力,以及(II-I-II)延伸部,其可移动地支撑突出部,延伸部在与突出部交叉的方向上延伸,
其中,撑靠部件包括(II-II-I)撑靠部,用于限制驱动力接收部在联接件的周向上移动。
<<结构例A14>>
根据结构例A12或结构例A13的鼓单元,其中,驱动力接收部件包括具有突出部以及延伸部的支撑部,支撑部可移动地支撑驱动力接收部。
<<结构例A15>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)可移动的驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,
(II-II)被推压部,其能够与驱动力接收部一起移动,
(II-III)撑靠部,用于限制驱动力接收部在联接件的周向上移动,撑靠部在接触被推压部时把驱动力接收部至少向联接件的径向内侧推压。
<<结构例A16>>
根据结构例A15的鼓单元,其中,联接件包括支撑部,其可动地支撑驱动力接收部。
<<结构例A17>>
根据结构例A16的鼓单元,其中,支撑部包括设置有驱动力接收部的突出部和沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例A18>>
根据结构例A1-结构例A17中任一项的鼓单元,其中,驱动力接收部能够至少沿联接件的径向移动。
<<结构例A19>>
根据结构例A1-结构例A18中任一项的鼓单元,其中,支撑部包括变形部,其能够弹性变形以使驱动力接收部移动。
<<结构例A20>>
根据结构例A1-结构例A19中任一项的鼓单元,其中,延伸部的至少一部分设置在感光鼓的内部。
<<结构例A21>>
根据结构例A1-结构例A20中任一项的鼓单元,其中,整个延伸部设置在感光鼓的内部。
<<结构例A22>>
根据结构例A1-结构例A21中任一项的鼓单元,其中,突出部的至少一部分在感光鼓的内部。
<<结构例A23>>
根据结构例A1-结构例A22中任一项的鼓单元,其中,整个突出部设置在感光鼓的内部。
<<结构例A24>>
根据结构例A1-结构例A23中任一项的鼓单元,其中,突出部从延伸部突出的长度短于延伸部的长度。
<<结构例A25>>
根据结构例A1-结构例A24中任一项的鼓单元,其中,突出部至少向联接件的径向内侧突出。
<<结构例A26>>
根据结构例A1-结构例A25中任一项的鼓单元,其中,驱动力接收部的至少一部分在感光鼓的内部。
<<结构例A27>>
根据结构例A1-结构例A26中任一项的鼓单元,其中,整个驱动力接收部在感光鼓的内部。
<<结构例A28>>
根据结构例A1-结构例A27中任一项的鼓单元,其中,整个支撑部在感光鼓的内部。
<<结构例A29>>
根据结构例A1-结构例A28中任一项的鼓单元,其中,驱动力接收部设置有相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例A30>>
根据结构例A29的鼓单元,其中,驱动力接收部的倾斜部倾斜成使得当从驱动轴接收驱动力时产生把驱动力接收部至少向联接件径向内侧推压的力。
<<结构例A31>>
根据结构例A29或结构例A30的鼓单元,其中,当沿着联接件的轴线观察时,驱动力接收部面对从驱动力接收部的自由端在驱动力接收部沿径向向外移动方向上延伸的线。
<<结构例A32>>
根据结构例A1-结构例A31中任一项的鼓单元,其中,支撑部的至少一部分由金属制成。
<<结构例A33>>
根据结构例A1-结构例A32中任一项的鼓单元,其中,支撑部包括金属部和树脂材料部。
<<结构例A34>>
根据结构例A33的鼓单元,其中,金属部的一部分被树脂材料部覆盖,并且其它部分不被树脂材料部覆盖。
<<结构例A34-2>>
根据结构例A33或结构例A34的鼓单元,其中,金属部设置有通孔,至少在通孔中设置有树脂材料部。
<<结构例A35>>
根据结构例A1-结构例A34-2中任一项的鼓单元,其中,支撑部的至少一部分由树脂材料制成。
<<结构例A36>>
根据结构例A1-结构例A35中任一项的鼓单元,其中,在驱动力接收部所设位置处沿着垂直于联接件轴向的平面截取的支撑部横截面形状为非圆形的。
<<结构例A37>>
根据结构例A1-结构例A36中任一项的鼓单元,其中,联接件包括多个驱动力接收部和多个支撑部。
<<结构例A38>>
根据结构例A37的鼓单元,其中,沿着联接件的轴向观察时,所述多个驱动力接收部基本上以等间隔设置。
<<结构例A39>>
根据结构例A37或结构例A38的鼓单元,其中,联接件的驱动力接收部的数量和联接件的支撑部的数量均是三个。
<<结构例A40>>
根据结构例A37或结构例A38的鼓单元,其中,联接件的驱动力接收部的数量和联接件的支撑部的数量均是两个。
<<结构例A41>>
根据结构例A1-结构例A40中任一项的鼓单元,其中,支撑部包括变形部,其能够弹性变形以使驱动力接收部移动。
<<结构例A42>>
根据结构例A1-结构例A41中任一项的鼓单元,其中,联接件包括与感光鼓的内周面接触的内周面接触部和相对于联接件轴向设置在感光鼓外侧的圆筒部。
<<结构例A43>>
根据结构例A42的单元,其中,支撑部由内周面接触部的内表面支撑。
<<结构例A44>>
根据结构例A42的鼓单元,其中,支撑部由第二圆筒部的内表面支撑。
<<结构例A45>>
根据结构例A42的鼓单元,其中,联接件包括第一内径部和第二内径部,该第二内径部相对于所述轴向设置在第一内径部的内侧并且该第二内径部的内径比第一内径部的内径小。
<<结构例A46>>
根据结构例A1-结构例A45中任一项的鼓单元,其中,联接件设置有具有圆形内周面的引导部。
<<结构例A47>>
根据结构例A1-结构例A46中任一项的鼓单元,其中,联接件设置有沿着联接件的周向延伸并面向联接件轴线的曲面部,其中,曲面部相对于联接件的径向设置在驱动力接收部的自由端的外侧和支撑部的固定端的内侧。
<<结构例A48>>
根据结构例A47的鼓单元,其中,曲面部由支撑部支撑。
<<结构例A49>>
根据结构例A47或结构例A48的鼓单元,其中,曲面部相对于联接件的周向设置在面向驱动力接收部的一侧。
<<结构例A50>>
根据结构例A47-结构例A49中任一项的鼓单元,其中,曲面部和支撑部的固定端投影到联接件的轴线上时,接触部的投影范围和固定端的投影范围至少部分地彼此重叠。
<<结构例A51>>
根据结构例A1-结构例A50中任一项的鼓单元,其中,驱动力接收部在径向上可移动至少0.6mm。
<<结构例A52>>
根据结构例A1-结构例A51中任一项的鼓单元,其中,驱动力接收部在径向上可移动至少1.2mm。
<<结构例A53>>
根据结构例A1-结构例A52中任一项的鼓单元,其中,支撑部配置成使得当从鼓单元外部接收到力时与自由状态相比将驱动力接收部移动到联接件径向外侧的位置。
<<结构例A54>>
根据结构例A1-结构例A53中任一项的鼓单元,其中,突出部设置有相对于联接件的轴向面向外侧的倾斜部。
<<结构例A55>>
根据结构例A1-结构例A54中任一项的鼓单元,其中,突出部设置有相对于联接件的轴向面向内侧的倾斜部。
<<结构例A56>>
根据结构例A1-结构例A55中任一项的鼓单元,其中,支撑部的固定端的至少一部分设置在感光鼓的内部。
<<结构例A57>>
根据结构例A1-结构例A56中任一项的鼓单元,其中,支撑部的固定端全部设置在感光鼓的内部。
<<结构例A58>>
根据结构例A1-结构例A57中任一项的鼓单元,其中,支撑部通过以其固定端作为支点变形而移动驱动力接收部。
<<结构例A59>>
根据结构例A1-结构例A58中任一项的鼓单元,其中,驱动力接收部相对于联接件的径向设置在支撑部的固定端的内侧。
<<结构例A60>>
根据结构例A1-结构例A59中任一项的鼓单元,其中,支撑部的自由端相对于联接件的径向位于支撑部的固定端的内侧。
<<结构例A61>>
根据结构例A1-结构例A60中任一项的鼓单元,其中,支撑部至少沿联接件的轴向延伸。
<<结构例A62>>
根据结构例A1至结构例A61中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向设置在驱动力接收部的内侧。
<<结构例A63>>
根据结构例A1-结构例A62中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向位于支撑部的自由端的内侧。
<<结构例A64>>
根据结构例A1至结构例A63中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向设置在驱动力接收部的外侧。
<<结构例A65>>
根据结构例A1-结构例A64中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向设置在支撑部的自由端的外侧。
<<结构例A66>>
根据结构例A1至结构例A65中任一项的鼓单元,其中,联接件包括这样的一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例A67>>
根据结构例A66的鼓单元,其中,支撑部倾斜离开联接件的内表面。
<<结构例A68>>
根据结构例A1-结构例A67中任一项的鼓单元,其中,支撑部是卡扣配合部。
<<结构例A69>>
根据结构例A1-结构例A68中任一项的鼓单元,其中,支撑部与联接件的内表面连接。
<<结构例A70>>
根据结构例A1-结构例A69中任一项的鼓单元,其中,支撑部至少沿联接件的周向延伸。
<<结构例A71>>
根据结构例A1-结构例A70中任一项的鼓单元,其中,当沿着联接件的轴线观察时,支撑部与从驱动接收部自由端引出的驱动接收部法线交叉。
<<结构例A72>>
根据结构例A1-结构例A71中任一项的鼓单元,其中,支撑部在相对于联接件轴线以不小于30°且不大于90°的角度倾斜的方向上延伸。
<<结构例A73>>
根据结构例A1-结构例A71中任一项的鼓单元,其中,支撑部在相对于联接件轴线以不小于50°且不大于90°的角度倾斜的方向上延伸。
<<结构例A74>>
根据结构例A1-结构例A73中任一项的单元,其中,支撑部在基本上垂直于联接件轴线的方向上延伸。
<<结构例A75>>
根据结构例A1至A74中任一项的鼓单元,其中,当支撑部的固定端和驱动力接收部投影到联接件轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例A76>>
根据结构例A1-结构例A75中任一项的鼓单元,其中,支撑部相对于垂直于联接件轴线的方向倾斜地延伸。
<<结构例A77>>
根据结构例A1-结构例A76中任一项的鼓单元,其中,支撑部基本上平行于所述轴向延伸。
<<结构例A78>>
根据结构例A1-结构例A77中任一项的鼓单元,还包括:设置有驱动力接收部和支撑部的驱动力接收部件;和驱动力从驱动力接收部件传递到的被力传递部件。
<<结构例A79>>
根据结构例A78的鼓单元,其中,被力传递部件固定到感光鼓。
<<结构例A80>>
根据结构例A78或结构例A79的鼓单元,其中,驱动力接收部件能够相对于被力传递部件在联接件的周向上移动。
<<结构例A81>>
根据结构例A78-结构例A80中任一项的鼓单元,其中,驱动力接收部件可移动地由被力传递部件支撑。
<<结构例A82>>
根据结构例A78-结构例A81中任一项的鼓单元,其中,驱动力接收部件包括板状部。
<<结构例A83>>
根据结构例A82的鼓单元,其中,被力传递部件包括被力传递部,该被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部能够与在驱动力接收部所设置的表面侧的相反侧的板状部表面接触。
<<结构例A84>>
根据结构例A83的鼓单元,其中,被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例A85>>
根据结构例A82-结构例A84中任一项的鼓单元,其中,板状部包括设置有驱动力接收部的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、设置在第一部分和第二部分之间的弯曲部。
<<结构例A86>>
根据结构例A85的鼓单元,其中,第一部分至少朝联接件径向内侧突出,并且第二部分至少沿联接件的周向延伸。
<<结构例A87>>
根据结构例A82-结构例A86中任一项的鼓单元,其中,板状部相对于被力传递部件是可移动的。
<<结构例A88>>
根据结构例A82-结构例A87中任一项的鼓单元,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例A89>>
根据结构例A82-结构例A88中任一项的鼓单元,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例A90>>
根据结构例A82的鼓单元,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例A91>>
根据结构例A82-结构例A90中任一项的鼓单元,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例A92>>
根据结构例A82-结构例A91中任一项的鼓单元,其中,板状部由金属制成。
<<结构例A93>>
根据结构例A78-结构例A92中任一项的鼓单元,其中,驱动力接收部件包括板簧。
<<结构例A94>>
根据结构例A78-结构例A93中任一项的鼓单元,其中,被力传递部件包括被力传递部,被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部相对于联接件的径向设置在驱动力接收部的自由端的外侧。
<<结构例A95>>
根据结构例A78-结构例A94中任一项的鼓单元,其中,驱动力接收部件能够相对于被力传递部件在联接件的周向上移动。
<<结构例A96>>
根据结构例A78-结构例A95中任一项的鼓单元,其中,驱动力接收部件能够围绕联接件的轴线相对于被力传递部件旋转。
<<结构例A97>>
根据结构例A78-结构例A96中任一项的鼓单元,其中,被力传递部件包括用于通过接触驱动力接收部件而接收驱动力的被力传递部,并且被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例A98>>
根据结构例A78-结构例A97中任一项的鼓单元,其中,被力传递部件与驱动力接收部件不是一体的。
<<结构例A99>>
根据结构例A1-结构例A98中任一项的鼓单元,其中,联接件设置有撑靠部,用于限制驱动力接收部在联接件周向上的运动。
<<结构例A100>>
根据结构例A99的鼓单元,其中,撑靠部在与驱动力接收部设置侧相反的一侧上与支撑部相对。
<<结构例A101>>
根据结构例A99或结构例A100的鼓单元,其中,撑靠部设置有倾斜部。
<<结构例A102>>
根据结构例A101的鼓单元,其中,撑靠部的倾斜部倾斜成使得产生把驱动力接收部至少朝联接件径向内侧的方向推压的力。
<<结构例A103>>
根据结构例A101或结构例A102的鼓单元,其中,倾斜部相对于驱动力接收部倾斜。
<<结构例A104>>
根据结构例A99-结构例A103中任一项的鼓单元,其中,联接件包括能够与驱动力接收部一起移动的被推压部,并且撑靠部通过接触被推压部而至少超联接件的径向内侧推压驱动力接收部。
<<结构例A105>>
根据结构例A104的鼓单元,其中,支撑部设置有被推压部。
<<结构例A106>>
根据结构例A99-结构例A105中任一项的鼓单元,其中,联接件包括:(1)设置有驱动力接收部和支撑部的驱动力接收部件,以及(2)与驱动力接收部件不是一体并且设置有撑靠部的撑靠部件。
<<结构例A107>>
根据结构例A99-结构例A106中任一项的鼓单元,其中,联接件包括:(1)设置有驱动力接收部和支撑部的驱动力接收部件,以及(2)具有撑靠部的撑靠部件,并且其中,驱动力接收部件能够相对于撑靠部件旋转。
<<结构例A108>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,鼓单元包括:
(I)感光鼓;以及
(II)设置在感光鼓上的联接件,联接件包括(II-I)板状部,其设置有驱动力接收部,以用于接收旋转感光鼓的驱动力,以及(II-II)被力传递部件,驱动力从板状部传递到被力传递部件。
<<结构例A109>>
根据结构例A108的鼓单元,其中,板状部能够相对于被力传递部件至少在联接件的径向上移动。
<<结构例A110>>
根据结构例A108或结构例A109的鼓单元,其中,板状部被支撑成能够相对于被力传递部件至少在联接件的周向上移动。
<<结构例A111>>
根据结构例A108-结构例A110中任一项的鼓单元,其中,被力传递部件包括用于通过接触板状部而从驱动力接收部件接收驱动力的被力传递部,被力传递部接触与板状部的驱动力接收部设置侧相反的一侧。
<<结构例A112>>
根据结构例A111的鼓单元,其中,相对于联接件的径向而言,被力传递部设置在板状部的自由端的外侧。
<<结构例A113>>
根据结构例A108-结构例A112中任一项的鼓单元,其中,板状部包括设置有驱动力接收部的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、设置在第一部分和第二部分之间的弯曲部。
<<结构例A114>>
根据结构例A113的鼓单元,其中,第一部分至少朝联接件的径向内侧突出,并且第二部分至少沿联接件的周向延伸。
<<结构例A115>>
根据结构例A113或结构例A114的鼓单元,其中,第一部分相对于联接件的径向倾斜。
<<结构例A116>>
根据结构例A113-结构例A115中任一项的鼓单元,其中,第一部分倾斜成使得当接收驱动力时产生把驱动力接收部至少朝联接件径向内侧推压的力。
<<结构例A117>>
根据结构例A108-结构例A116中任一项的鼓单元,其中,板状部由金属制成。
<<结构例A118>>
根据结构例A108-结构例A116中任一项的鼓单元,其中,板状部是板簧。
<<结构例A119>>
根据结构例A108-结构例A118中任一项的鼓单元,其中,板状部相对于被力传递部件是可移动的。
<<结构例A120>>
根据结构例A108-结构例A119中任一项的鼓单元,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例A121>>
根据结构例A108-结构例A120中任一项的鼓单元,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例A122>>
根据结构例A108-结构例A121中任一项的鼓单元,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例A123>>
根据结构例A108-结构例A122中任一项的鼓单元,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例A124>>
根据结构例A1-结构例A123中任一项的鼓单元,其中,联接件具有相对于联接件轴向设置在驱动力接收部内侧并且相对于联接件轴向朝外侧开口的凹部。
<<结构例A125>>
根据结构例A124的鼓单元,其中,凹部具有相对于所述轴向朝向联接件内侧收窄的形状。
<<结构例A126>>
根据结构例A124或结构例A125的鼓单元,其中,凹部为基本上呈锥形凹陷的部分。
<<结构例A127>>
根据结构例A124-结构例A126中任一项的鼓单元,其中,联接件包括设置有驱动力接收部的驱动力接收部件以及设置有所述凹部的定位部件。
<<结构例A128>>
根据结构例A124-结构例A127中任一项的鼓单元,其中,定位部件或驱动力接收部件设置有用于将定位部件安装到驱动力接收部的卡扣配合部。
<<结构例A129>>
根据结构例A127或结构例A128的鼓单元,其中,定位部件能够通过相对于驱动力接收部件旋转而从驱动力接收部件拆卸。
<<结构例A130>>
一种能够可拆卸地安装到电子成像设备主组件中的鼓单元,其包括:
感光鼓;以及
联接件,其设置在感光鼓上并配置成接收用于旋转感光鼓的驱动力,
其中,卡扣配合部的至少一部分在感光鼓的内部。
<<结构例A131>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,其包括:
感光鼓;以及
联接件,其设置在感光鼓上并配置成接收用于旋转感光鼓的驱动力,
其中,卡扣配合部至少在联接件的周向上延伸。
<<结构例A132>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,其包括:
感光鼓;以及
联接件,其包括卡扣配合部,以接收用于旋转感光鼓的驱动力;
可旋转地被支撑的被支承部;
其中,卡扣配合部的至少一部分相对于联接件的轴向位于被支承部的内侧。
<<结构例A133>>
一种能够可拆卸地安装到成像设备主组件中的鼓单元,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上并包括卡扣配合部,该联接件配置成接收用于旋转感光鼓的驱动力,
其中,当卡扣配合部和感光鼓投影到联接件的轴线上时,卡扣配合部的投影范围的至少一部分和感光鼓的投影范围的至少一部分重叠。
<<结构例A134>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)鼓单元;以及
(II)可旋转地支撑鼓单元的支承部;
其中,鼓单元包括:
(II-I)感光鼓;
(II-II)联接件,其设置在感光鼓上,联接件包括(II-II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II-II)可移动地支撑驱动力接收部的支撑部,
其中,支撑部包括:突出部,其设置有驱动力接收部;以及延伸部,其沿与突出部的突出方向交叉的方向延伸并可动地支撑突出部,以及
其中,驱动力接收部的至少一部分和/或支撑部的至少一部分相对于联接件的轴向位于被支承部的内侧。
<<结构例A135>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)鼓单元;以及
(II)可旋转地支撑鼓单元的支承部;
其中,鼓单元包括:
(II-I)感光鼓;
(II-II)联接件,其设置在感光鼓上,联接件包括(II-II-I)驱动力接收部,其配置成接收用于旋转感光鼓的驱动力,以及(II-II-II)可移动地支撑驱动力接收部的支撑部,
其中,卡扣配合部的至少一部分相对于联接件的轴向位于被支承部的内侧。
<<结构例B1>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部,
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分在可旋转部件的内部。
<<结构例B2>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部,
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)延伸部,其沿与突出部的突出方向交叉的方向且至少在联接件的周向上延伸。
<<结构例B3>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部,
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,驱动力接收部设置有相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例B4>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部;以及
(III)配置成可旋转地被支撑的被支承部,
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分相对于联接件的轴向位于被支承部的内侧。
<<结构例B5>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部;以及
(III)配置成可旋转地被支撑的被支承部,
其中,支撑部包括(II-II-I)设置有驱动力接收部的突出部,以及(II-II-II)沿与突出部的突出方向交叉的方向延伸的延伸部,
其中,当支撑部、驱动力接收部和可旋转部件投影到联接件的轴线上时,支撑部和驱动力接收部的至少一部分投影范围与可旋转部件的至少一部分投影范围重叠。
<<结构例B6>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)支撑部,其具有自由端和固定端,并且至少沿联接件的轴向延伸,支撑部可旋转地支撑驱动力接收部,并且支撑部的至少一部分设置在联接件内部,
其中,支撑部包括设置有驱动力接收部的突出部以及沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例B7>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可旋转地支撑驱动力接收部的支撑部;
其中,支撑部包括设置有驱动力接收部的突出部以及沿与突出部的突出方向交叉的方向延伸的延伸部,
其中,当支撑部、驱动力接收部和可旋转部件投影到联接件的轴线上时,支撑部和驱动力接收部的至少一部分投影范围和可旋转部件的至少一部分投影范围彼此重叠。
<<结构例B8>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部,
其中,驱动力接收部相对于联接件的轴向在支撑部的内侧。
<<结构例B9>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部,以及(II-III)凹部,其相对于联接件的轴向设置在驱动力接收部的内侧,
其中,凹部相对于轴向朝向外侧开口并朝向内侧收窄。
<<结构例B10>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可移动地支撑驱动力接收部的支撑部,
其中,当沿着联接件的轴线观看时,支撑部与从驱动接收部自由端引出的驱动接收部法线交叉。
<<结构例B11>>
根据结构例B8-结构例B10中任一项的盒,其中,支撑部包括设置有驱动力接收部的突出部和沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例B12>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:.
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)设置在可旋转部件上的联接件,
其中,联接件包括,
(II-I)驱动力接收部件,其包括(II-I-I)突出部,该突出部设置有驱动力接收部,以接收用于旋转可旋转部件的驱动力,以及(II-I-II)在与突出部的突出方向交叉的方向上延伸的延伸部,以及
(II-II)用于从驱动力接收部件接收驱动力的被力传递部件,
其中,驱动力接收部件能够在联接件的周向上相对于被力传递部件移动。
<<结构例B13>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,并包括(II-I)驱动力接收部件和(II-II)与驱动力接收部件不是一体的撑靠部件,
其中,驱动力接收部件包括(II-I-I)突出部,其具有驱动力接收部,以接收用于旋转可旋转部件的驱动力,以及(II-I-II)延伸部,其可旋转地支撑突出部并在与突出部交叉的方向上延伸,以及
其中,撑靠部件包括(II-II-I)撑靠部,其用于限制驱动力接收部在联接件的周向上移动。
<<结构例B14>>
根据结构例B12或结构例B13的盒,其中,驱动力接收部件包括支撑部,其设置有突出部和延伸部,并且可旋转地支撑驱动力接收部。
<<结构例B15>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括:
(II-I)可动的驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,
(II-II)被推压部,其能够与驱动力接收部一起移动,
(II-III)撑靠部,用于限制驱动力接收部在联接件周向上的运动,支撑部在接触被推压部时把驱动力接收部至少朝联接件径向内侧推压。
<<结构例B16>>
根据结构例B15的盒,其中,联接件包括可动地支撑驱动力接收部的支撑部。
<<结构例B17>>
根据结构例B16的盒,其中,支撑部包括设置有驱动力接收部的突出部以及沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例B18>>
根据结构例B1-结构例B17中任一项的盒,其中,驱动力接收部至少沿联接件径向可移动。
<<结构例B19>>
根据结构例B1-结构例B18中任一项的盒,其中,支撑部设置有能够弹性变形以移动驱动力接收部的变形部。
<<结构例B20>>
根据结构例B1-结构例B19中任一项的盒,其中,延伸部的至少一部分设置在可旋转部件的内部。
<<结构例B21>>
根据结构例B1-结构例B20中任一项的盒,其中,整个延伸部在可旋转部件的内部。
<<结构例B22>>
根据结构例B1-结构例B21中任一项的盒,其中,突出部的至少一部分设置在可旋转部件中。
<<结构例B23>>
根据结构例B1-结构例B22中任一项的盒,其中,整个突出部在可旋转部件的内部。
<<结构例B24>>
根据结构例B1-结构例B23中任一项的盒,其中,突出部从延伸部突出的长度短于延伸部的长度。
<<结构例B25>>
根据结构例B1-结构例B24中任一项的盒,其中,突出部至少向联接件的径向内侧突出。
<<结构例B26>>
根据结构例B1-结构例B25中任一项的盒,其中,驱动力接收部的至少一部分在可旋转部件的内部。
<<结构例B27>>
根据结构例B1-结构例B26中任一项的盒,其中,整个驱动力接收部在可旋转部件的内部。
<<结构例B28>>
根据结构例B1-结构例B27中任一项的盒,其中,整个支撑部在可旋转部件的内部。
<<结构例B29>>
根据结构例B1-结构例B28中任一项的盒,其中,驱动力接收部设置有相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例B30>>
根据结构例B29的盒,其中,倾斜部倾斜成使得当接收驱动力时产生把驱动力接收部至少朝联接件径向内侧推压的力。
<<结构例B31>>
根据结构例B29或结构例B30的盒,其中,当沿着联接件的轴线观察时,驱动力接收部面向从驱动力接收部的自由端在驱动力接收部径向向外移动方向上延伸的线。
<<结构例B32>>
根据结构例B1-结构例B31中任一项的盒,其中,支撑部的至少一部分由金属制成。
<<结构例B33>>
根据结构例B1-结构例B32中任一项的盒,其中,支撑部包括金属部和树脂材料部。
<<结构例B34>>
根据结构例B33的盒,其中,金属部的一部分被树脂材料部覆盖,并且其它部分不被树脂材料部覆盖。
<<结构例B34-2>>
根据结构例B33或结构例B34的盒,其中,金属部设置有通孔,树脂材料部至少设置在通孔中。
<<结构例B35>>
根据结构例B1-结构例B34-2中任一项的盒,其中,支撑部的至少一部分由树脂材料制成。
<<结构例B36>>
根据结构例B1-结构例B35中任一项的盒,其中,在驱动力接收部所设位置处沿着垂直于联接件轴向的平面截取的支撑部横截面形状为非圆形的。
<<结构例B37>>
根据结构例B1-结构例B36中任一项的盒,其中,联接件包括多个驱动力接收部和多个支撑部。
<<结构例B38>>
根据结构例B37的盒,其中,沿着联接件的轴向观察时,所述多个驱动力接收部基本上以等间隔设置。
<<结构例B39>>
根据结构例B37或结构例B38的盒,其中,联接件的驱动力接收部的数量和联接件的支撑部的数量均是三个。
<<结构例B40>>
根据结构例B37或结构例B38的盒,其中,联接件的驱动力接收部的数量和联接件的支撑部的数量均是两个。
<<结构例B41>>
根据结构例B1-结构例B40中任一项的盒,其中,联接件包括能够弹性变形以移动驱动力接收部的变形部。
<<结构例B42>>
根据结构例B1-结构例B41的盒,其中,联接件包括与可旋转部件内周面接触的内周面接触部和相对于联接件的轴向设置在内周面接触部外侧的圆筒部。
<<结构例B43>>
根据结构例B42的盒,其中,支撑部由内周面接触部的内表面支撑。
<<结构例B45>>
根据结构例B42的盒,其中,支撑部由第二圆筒部的内表面支撑。
<<结构例B43>>
根据结构例B1-结构例B42中任一项的盒,其中,联接件包括第一内径部和第二内径部,该第二内径部相对于轴向设置在第一内径部的内侧,并且该第二内径部的内径比第一内径部的内径小。
<<结构例B46>>
根据结构例B1-结构例B45中任一项的盒,其中,联接件设置有具有圆形内周面的引导部。
<<结构例B47>>
根据结构例B1-结构例B46中任一项的盒,其中,联接件设置有沿着联接件的周向延伸并面向联接件轴线的曲面部,其中,曲面部相对于联接件的径向设置在驱动力接收部的自由端的外侧和支撑部的固定端的内侧。
<<结构例B48>>
根据结构例B1-结构例B47中任一项的盒,其中,曲面部由支撑部支撑。
<<结构例B49>>
根据结构例B47或结构例B48的盒,其中,曲面部相对于联接件的周向设置在面向驱动力接收部的一侧。
<<结构例B50>>
根据结构例B47-结构例B49中任一项的盒,其中,曲面部和支撑部的固定端投影到联接件的轴线上时,接触部的投影范围和固定端的投影范围至少部分地彼此重叠。
<<结构例B51>>
根据结构例B1-结构例B50中任一项的盒,其中,驱动力接收部在径向上可移动至少0.6mm。
<<结构例B52>>
根据结构例B1-结构例B51中任一项的盒,其中,驱动力接收部在径向上可移动至少1.0mm。
<<结构例B53>>
根据结构例B1-结构例B52中任一项的盒,其中,支撑部配置成当从盒的外部接收力时与自由状态相比将驱动力接收部移动到联接件径向外侧的位置。
<<结构例B54>>
根据结构例B1-结构例B53中任一项的盒,其中,突出部设置有相对于联接件轴向面向外侧的倾斜部。
<<结构例B55>>
根据结构例B1-结构例B54中任一项的盒,其中,突出部设置有相对于联接件轴向面向内侧的倾斜部。
<<结构例B56>>
根据结构例B1-结构例B55中任一项的盒,其中,支撑部的固定端的至少一部分设置在可旋转部件的内部。
<<结构例B57>>
根据结构例B1-结构例B56中任一项的盒,其中,支撑部的固定端全部设置在可旋转部件的内部。
<<结构例B58>>
根据结构例B1-结构例B57中任一项的盒,其中,支撑部通过以其固定端作为支点变形而移动驱动力接收部。
<<结构例B59>>
根据结构例B1-结构例B58中任一项的盒,其中,驱动力接收部相对于联接件的径向设置在支撑部的固定端的内侧。
<<结构例B60>>
根据结构例B1-结构例B59中任一项的盒,其中,支撑部的自由端相对于联接件的径向位于支撑部的固定端的内侧。
<<结构例B61>>
根据结构例B1-结构例B60中任一项的盒,其中,支撑部至少沿联接件的轴向延伸。
<<结构例B62>>
根据结构例B1至结构例B61中任一项的盒,其中,支撑部的固定端相对于联接件的轴向设置在驱动力接收部的内侧。
<<结构例B63>>
根据结构例B1-结构例B62中任一项的盒,其中,支撑部的固定端相对于联接件的轴向位于支撑部的自由端的内侧。
<<结构例B64>>
根据结构例B1至结构例B63中任一项的盒,其中,支撑部的固定端相对于联接件的轴向设置在驱动力接收部的外侧。
<<结构例B65>>
根据结构例B1-结构例B64中任一项的盒,其中,支撑部的固定端相对于联接件的轴向设置在支撑部的自由端的外侧。
<<结构例B66>>
根据结构例B1至结构例B65中任一项的盒,其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例B67>>
根据结构例B66的盒,其中,支撑部倾斜离开联接件的内表面。
<<结构例B68>>
根据结构例B1-结构例B67中任一项的盒,其中,支撑部是卡扣配合部。
<<结构例B69>>
根据结构例B1-结构例B68中任一项的盒,其中,支撑部与联接件的内表面连接。
<<结构例B70>>
根据结构例B1-结构例B69中任一项的盒,其中,支撑部至少沿联接件的周向延伸。
<<结构例B71>>
根据结构例B1-结构例B70中任一项的盒,其中,当沿着联接件的轴线观察时,支撑部与从驱动接收部自由端引出的驱动接收部法线交叉。
<<结构例B72>>
根据结构例B1-结构例B71中任一项的盒,其中,支撑部在相对于联接件轴线以30°-90°角度倾斜的方向上延伸。
<<结构例B73>>
根据结构例B1-结构例B71中任一项的盒,其中,支撑部在相对于联接件轴线以50°-90°角度倾斜的方向上延伸。
<<结构例B74>>
根据结构例B1-结构例B73中任一项的盒,其中,支撑部在基本上垂直于联接件轴线的方向上延伸。
<<结构例B75>>
根据结构例B1至B74中任一项的盒,其中,当支撑部的固定端和驱动力接收部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例B76>>
根据结构例B1-结构例B75中任一项的盒,其中,支撑部相对于垂直于联接件轴线的方向倾斜地延伸。
<<结构例B77>>
根据结构例B1-结构例B76中任一项的盒,其中,支撑部基本上平行于所述轴向延伸。
<<结构例B78>>
根据结构例B1-结构例B77中任一项的盒,还包括:驱动力接收部件,其设置有驱动力接收部和支撑部;以及被力传递部件,驱动力从驱动力接收部件传递到被力传递部件。
<<结构例B79>>
根据结构例B78的盒,其中,被力传递部件固定到可旋转部件。
<<结构例B80>>
根据结构例B78或结构例B79的盒,其中,驱动力接收部件能够相对于被力传递部件在联接件的周向上移动。
<<结构例B81>>
根据结构例B78-结构例B80中任一项的盒,其中,驱动力接收部件可移动地由被力传递部件支撑。
<<结构例B82>>
根据结构例B78-结构例B81中任一项的盒,其中,驱动力接收部件包括板状部。
<<结构例B83>>
根据结构例B82的盒,其中,被力传递部件包括被力传递部,该被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部能够与在驱动力接收部所设置的表面侧的相反侧的板状部表面接触。
<<结构例B84>>
根据结构例B83的盒,其中,被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例B85>>
根据结构例B82-结构例B84中任一项的盒,其中,板状部包括设置有驱动力接收部的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、设置在第一部分和第二部分之间的弯曲部。
<<结构例B86>>
根据结构例B1-结构例B85中任一项的盒,其中,第一部分至少朝联接件的径向内侧突出,并且第二部分至少沿联接件的周向延伸。
<<结构例B87>>
根据结构例B82-结构例B86中任一项的盒,其中,板状部相对于被力传递部件是可移动的。
<<结构例B88>>
根据结构例B82-结构例B87中任一项的盒,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例B89>>
根据结构例B82-结构例B88中任一项的盒,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例B90>>
根据结构例B82-结构例B89中任一项的盒,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例B91>>
根据结构例B82-结构例B90中任一项的盒,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例B92>>
根据结构例B82-结构例B91中任一项的盒,其中,板状部由金属制成。
<<结构例B93>>
根据结构例B82-结构例B92中任一项的盒,其中,驱动力接收部件包括板簧。
<<结构例B94>>
根据结构例B78-结构例B93中任一项的盒,其中,被力传递部件包括被力传递部,被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部相对于联接件的径向设置在驱动力接收部的自由端的外侧。
<<结构例B95>>
根据结构例B78-结构例B94中任一项的盒,其中,驱动力接收部件能够相对于被力传递部件在联接件的周向上移动。
<<结构例B96>>
根据结构例B78-结构例B95中任一项的盒,其中,驱动力接收部件能够围绕联接件的轴线相对于被力传递部件旋转。
<<结构例B97>>
根据结构例B78-结构例B96中任一项的盒,其中,被力传递部件包括用于通过接触驱动力接收部件而接收驱动力的被力传递部,并且被力传递部相对于联接件的径向设置在板状部自由端的外侧。
<<结构例B98>>
根据结构例B78-结构例B97中任一项的盒,其中,被力传递部件与驱动力接收部件不是一体的。
<<结构例B99>>
根据结构例B1-结构例B98中任一项的盒,其中,联接件设置有用于限制驱动力接收部在联接件周向上运动的撑靠部。
<<结构例B100>>
根据结构例B99的盒,其中,撑靠部在与设置有驱动力接收部的一侧相反的一侧上与支撑部相对。
<<结构例B101>>
根据结构例B99或结构例B100的盒,其中,撑靠部设置有倾斜部。
<<结构例B102>>
根据结构例B99或结构例B101中任一项的盒,其中,撑靠部的倾斜部倾斜成使得产生把驱动力接收部至少朝联接件径向内侧的方向推压的力。
<<结构例B103>>
根据结构例B101-结构例B102中任一项的盒,其中,倾斜部相对于驱动力接收部倾斜。
<<结构例B104>>
根据结构例B99-结构例B103中任一项的盒,其中,联接件包括能够与驱动力接收部一起移动的被推压部,并且撑靠部通过接触被推压部而把驱动力接收部至少朝联接件径向内侧推压。
<<结构例B105>>
根据结构例B104的盒,其中,支撑部设置有被推压部。
<<结构例B106>>
根据结构例B1-结构例B105中任一项的盒,其中,联接件包括:(1)驱动力接收部件,其设置有驱动力接收部和支撑部,以及(2)撑靠部件,其与驱动力接收部件不是一体的并且设置有撑靠部。
<<结构例B107>>
根据结构例B1-结构例B106中任一项的盒,其中,联接件包括:(1)驱动力接收部件,其设置有驱动力接收部和支撑部,以及(2)具有撑靠部的撑靠部件,并且其中,驱动力接收部件能够相对于撑靠部件旋转。
<<结构例B108>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其设置在可旋转部件上,联接件包括:
(II-I)板状部,其设置有驱动力接收部,以接收用于旋转可旋转部件的驱动力,以及
(II-II)被力传递部件,驱动力从板状部传递到被力传递部件。
<<结构例B109>>
根据结构例B108的盒,其中,板状部能够相对于被力传递部件至少在联接件的径向上移动。
<<结构例B110>>
根据结构例B109的盒,其中,板状部被支撑成能够相对于被力传递部件至少在联接件的周向上移动。
<<结构例B111>>
根据结构例B108-结构例B110中任一项的盒,其中,被力传递部件包括用于通过接触板状部而从驱动力接收部件接收驱动力的被力传递部,并且被力传递部接触与设置有驱动力接收部的板状部侧相反的一侧。
<<结构例B112>>
根据结构例B108-结构例B111中任一项的盒,其中,被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例B113>>
根据结构例B108-结构例B112中任一项的盒,其中,板状部包括设置有驱动力接收部的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、设置在第一部分和第二部分之间的弯曲部。
<<结构例B114>>
根据结构例B108-结构例B113中任一项的盒,其中,板状部由金属制成。
<<结构例B115>>
根据结构例B108-结构例B114中任一项的盒,其中,板状部是板簧。
<<结构例B116>>
根据结构例B115的盒,其中,第一部分至少朝联接件的径向内侧突出,并且第二部分至少沿联接件的周向延伸。
<<结构例B117>>
根据结构例B115或结构例B116的盒,其中,第一部分相对于联接件的径向倾斜。
<<结构例B118>>
根据结构例B115-结构例B117中任一项的盒,其中,第一部分倾斜成使得当接收驱动力时产生把驱动力接收部至少朝联接件径向内侧推压的力。
<<结构例B119>>
根据结构例B108-结构例B118中任一项的盒,其中,板状部相对于被力传递部件是可移动的。
<<结构例B120>>
根据结构例B108-结构例B119中任一项的盒,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例B121>>
根据结构例B108-结构例B120中任一项的盒,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例B122>>
根据结构例B108-结构例B121中任一项的盒,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例B123>>
根据结构例B108-结构例B122中任一项的盒,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例B124>>
根据结构例B1-结构例B123中任一项的盒,其中,联接件具有相对于联接件轴向设置在驱动力接收部内侧并且相对于联接件轴向朝外侧开口的凹部。
<<结构例B125>>
根据结构例B124的盒,其中,凹部具有相对于所述轴向朝向联接件内侧收窄的形状。
<<结构例B126>>
根据结构例B124或结构例B125的盒,其中,凹部为基本上锥形的凹部。
<<结构例B127>>
根据结构例B124-结构例B126中任一项的盒,其中,联接件包括设置有驱动力接收部的驱动力接收部件以及设置有所述凹部的定位部件。
<<结构例B128>>
根据结构例B127的盒,其中,定位部件或驱动力接收部件设置有用于将定位部件安装到驱动力接收部的卡扣配合部。
<<结构例B129>>
根据结构例B127的盒,其中,定位部件能够通过相对于驱动力接收部件旋转而从驱动力接收部件拆卸。
<<结构例B130>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
可旋转部件,在其表面上承载显影剂的同时旋转;以及
设置在可旋转部件上的联接件,联接件包括卡扣配合部,其配置成接收用于旋转可旋转部件的驱动力,
其中,卡扣配合部的至少一部分在感光鼓的内部。
<<结构例B131>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
可旋转部件,在其表面上承载显影剂的同时旋转;以及
设置在可旋转部件上的联接件,联接件包括卡扣配合部,其配置成接收用于旋转可旋转部件的驱动力,
其中,卡扣配合部至少在联接件的周向上延伸。
<<结构例B132>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)设置在可旋转部件上的联接件,联接件包括卡扣配合部,其配置成接收用于旋转可旋转部件的驱动力,
其中,当卡扣配合部和感光鼓投影到联接件的轴线上时,卡扣配合部的投影范围的至少一部分和感光鼓的投影范围的至少一部分相互重叠。
<<结构例B133>>
根据结构例B1-结构例B132中任一项的盒,其中,联接件与可旋转部件的轴线同轴。
<<结构例B134>>
根据结构例B1-结构例B133中任一项的盒,其中,可旋转部件设置有轴,并且联接件设置有用于与该轴连接的安装部。
<<结构例B135>>
根据结构例B1-结构例B134中任一项的盒,其中,联接件轴线和驱动力接收部之间的最短距离大于联接件轴线和安装部之间的最短距离。
<<结构例B136>>
根据结构例B1-结构例B135中任一项的盒,其中,可旋转部件是显影辊。
<<结构例B137>>
根据结构例B1-结构例B136中任一项的盒,其中,可旋转部件是用于将显影剂供给到显影辊的供给辊。
<<结构例B138>>
根据结构例B1-结构例B137中任一项的盒,其中,可旋转部件包括显影辊和用于将显影剂供给到显影辊的供给辊以作为所述可旋转部件。
<<结构例B139>>
根据结构例B138的盒,其中,驱动力通过供给辊传递到显影辊。
<<结构例B140>>
根据结构例B1-结构例B139中任一项的盒,其中,可旋转部件是感光鼓。
<<结构例C1>>
一种用于电子照相成像设备的联接件,联接件包括:
驱动力接收部,其配置成接收驱动力;以及
支撑部,其可动地支撑驱动力接收部;
支撑部包括:
突出部,其设置有驱动力接收部,以及
延伸部,其在与突出部的突出方向交叉的方向和至少在联接件的周向上延伸。
<<结构例C2>>
一种用于电子照相成像设备的联接件,联接件包括:
驱动力接收部,其配置成接收驱动力;以及
支撑部,其可动地支撑驱动力接收部;
支撑部包括:
突出部,其设置有驱动力接收部,以及
延伸部,其在与突出部的突出方向交叉的方向上延伸,
其中,驱动力接收部包括相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例C3>>
一种用于电子照相成像设备的联接件,联接件包括:
驱动力接收部,其配置成接收驱动力;以及
支撑部,其具有自由端和固定端,并且至少在联接件的轴向上延伸,支撑部可移动地支撑驱动力接收部,并且支撑部的至少一部分设置在联接件内部,
其中,支撑部包括设置有驱动力接收部的突出部以及沿与突出部的突出方向交叉的方向延伸的延伸部,以及
其中,支撑部和联接件内表面之间的距离从支撑部的固定端侧朝向支撑部的自由端侧增加。
<<结构例C4>>
一种用于电子照相成像设备的联接件,联接件包括:
驱动力接收部,其被配置成接收驱动力;
支撑部,其可移动地支撑驱动力接收部;以及
凹部,其在联接件的轴向上开口并朝向凹部的底部收窄。
<<结构例C5>>
一种用于电子照相成像设备的联接件,联接件包括:
驱动力接收部,其被配置成接收驱动力;
支撑部,其可动地支撑驱动力接收部,
其中,当沿联接件的轴线观察时,支撑部与从驱动接收部的自由端引出的驱动接收部法线交叉。
<<结构例C6>>
根据结构例C4或结构例C5的联接件,还包括设置有驱动力接收部的突出部和沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例C7>>
一种用于电子照相成像设备的联接件,联接件包括:
(I)驱动力接收部件,其包括(I-I)突出部,该突出部设置有用于接收驱动力的驱动力接收部,以及(I-II)在与突出部的突出方向交叉的方向上延伸的延伸部,以及
(II)用于从驱动力接收部件接收驱动力的被力传递部件,
其中,驱动力接收部件能够在联接件的周向上相对于被力传递部件移动。
<<结构例C8>>
一种用于电子照相成像设备的联接件,联接件包括:
(I)驱动力接收部件,其包括(I-I)突出部,该突出部设置有用于接收驱动力的驱动力接收部,以及(I-II)在与突出部交叉的方向上延伸并可动地支撑突出部的延伸部,以及
(II)与驱动力接收部件不是一体的撑靠部件,用于限制驱动力接收部在联接件周向上移动。
<<结构例C9>>
根据结构例C7或结构例C8的联接件,其中,驱动力接收部件包括支撑部,其设置有突出部和延伸部,以可动地支撑驱动力接收部。
<<结构例C10>>
一种用于电子照相成像设备的联接件,联接件包括:
(I)可动的驱动力接收部,其配置成接收驱动力;
(II)被推压部,其能够与驱动力接收部一起移动;以及
(III)撑靠部,用于限制驱动力接收部在联接件周向上的运动,撑靠部在接触被推压部时把驱动力接收部至少向联接件的径向内侧推压。
<<结构例C11>>
根据结构例C10的联接件,还包括可动地支撑驱动力接收部的支撑部。
<<结构例C12>>
根据结构例C11的联接件,其中,支撑部包括设置有驱动力接收部的突出部以及沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例C13>>
根据结构例C1-结构例C12中任一项的联接件,其中,驱动力接收部能够至少沿联接件的径向移动。
<<结构例C14>>
根据结构例C1-结构例C13中任一项的联接件,其中,支撑部包括能够弹性变形的变形部以移动驱动力接收部。
<<结构例C15>>
根据结构例C1-结构例C14中任一项的联接件,其中,突出部从延伸部突出的长度短于延伸部的长度。
<<结构例C16>>
根据结构例C1-结构例C15中任一项的联接件,其中,突出部至少朝联接件的径向内侧突出。
<<结构例C17>>
根据结构例C1-结构例C16中任一项的联接件,其中,驱动力接收部设置有相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例C18>>
根据结构例C17的联接件,其中,驱动力接收部的倾斜部倾斜成使得当接收驱动力时产生把驱动力接收部至少向联接件径向内侧推压的力。
<<结构例C19>>
根据结构例C17或结构例C18的联接件,其中,当沿着联接件的轴线观察时,驱动力接收部面向从驱动力接收部的自由端在驱动力接收部径向向外移动的方向上延伸的线。
<<结构例C20>>
根据结构例C1-结构例C19中任一项的联接件,其中,支撑部的至少一部分由金属制成。
<<结构例C21>>
根据结构例C1-结构例C20中任一项的联接件,其中,支撑部包括金属部和树脂材料部。
<<结构例C22>>
根据结构例C21的联接件,其中,金属部的一部分被树脂材料部覆盖,并且其它部分不被树脂材料部覆盖。
<<结构例C22-2>>
根据结构例C21或结构例C22的联接件,其中,金属部设置有通孔,至少在通孔中设置有树脂材料部。
<<结构例C23>>
根据结构例C1-结构例C22-2中任一项的联接件,其中,支撑部的至少一部分由树脂材料制成。
<<结构例C24>>
根据结构例C1-结构例C23中任一项的联接件,其中,在驱动力接收部所设位置处沿着垂直于联接件轴向的平面截取的支撑部横截面形状为非圆形的。
<<结构例C25>>
根据结构例C1-结构例C24中任一项的联接件,其中,联接件包括多个驱动力接收部和多个支撑部。
<<结构例C26>>
根据结构例C25的联接件,其中,沿着联接件的轴向观察时,所述多个驱动力接收部基本上以等间隔设置。
<<结构例C27>>
根据结构例C25或结构例C26的联接件,其中,联接件的驱动力接收部的数量和联接件的支撑部的数量均是三个。
<<结构例C28>>
根据结构例C25或结构例C26的联接件,其中,联接件的驱动力接收部的数量和联接件的支撑部的数量均是两个。
<<结构例C29>>
根据结构例C1-结构例C29中任一项的联接件,其中,联接件包括能够弹性变形以移动驱动力接收部的变形部。
<<结构例C30>>
根据结构例C1-结构例C29中任一项的联接件,还包括第一圆筒部和第二圆筒部,第二圆筒部的直径比第一圆筒部的直径大。
<<结构例C31>>
根据结构例C1-结构例C30中任一项的联接件,其中,支撑部由第一圆筒部支撑。
<<结构例C32>>
根据结构例C1-结构例C31中任一项的联接件,其中,支撑部由第二圆筒部支撑。
<<结构例C33>>
根据结构例C1-结构例C32中任一项的联接件,其中,联接件具有圆形的内周面。
<<结构例C34>>
根据结构例C1-结构例C33中任一项的联接件,其中,联接件设置有沿着联接件的周向延伸并面向联接件轴线的曲面部,其中,曲面部相对于联接件的径向设置在驱动力接收部的自由端的外侧和支撑部的固定端的内侧。
<<结构例C35>>
根据结构例C1-结构例C34中任一项的联接件,其中,曲面部由支撑部支撑。
<<结构例C36>>
根据结构例C34或结构例C35的联接件,其中,曲面部相对于联接件的周向设置在面向驱动力接收部的一侧。
<<结构例C37>>
根据结构例C34-结构例C36中任一项的联接件,其中,曲面部和支撑部的固定端投影到联接件的轴线上时,接触部的投影范围和固定端的投影范围至少部分地彼此重叠。
<<结构例C38>>
根据结构例C1-结构例C37中任一项的联接件,其中,驱动力接收部在径向上可移动至少0.6mm。
<<结构例C39>>
根据结构例C1-结构例C38中任一项的联接件,其中,驱动力接收部在径向上可移动至少1.0mm。
<<结构例C40>>
根据结构例C1-结构例C39中任一项的联接件,其中,支撑部配置成当从联接件的外部接收力时与自由状态相比将驱动力接收部移动到联接件径向外侧的位置。
<<结构例C41>>
根据结构例C1-结构例C40中任一项的联接件,其中,突出部设置有相对于联接件轴向面向一侧的倾斜部。
<<结构例C42>>
根据结构例C41的联接件,其中,突出部设置有相对于联接件的轴向面向另一侧的倾斜部。
<<结构例C43>>
根据结构例C1-结构例C42中任一项的联接件,其中,支撑部通过以其固定端作为支点变形而移动驱动力接收部。
<<结构例C44>>
根据结构例C1-结构例C43中任一项的联接件,其中,驱动力接收部相对于联接件的径向设置在支撑部的固定端的内侧。
<<结构例C45>>
根据结构例C1-结构例C44中任一项的联接件,其中,支撑部的自由端相对于联接件的径向位于支撑部的固定端的内侧。
<<结构例C46>>
根据结构例C1-结构例C45中任一项的联接件,其中,支撑部至少沿联接件的轴向延伸。
<<结构例C47>>
根据结构例C1至结构例C46中任一项的联接件,其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例C48>>
根据结构例C47的联接件,其中,支撑部倾斜离开联接件的内表面。
<<结构例C49>>
根据结构例C1-结构例C48中任一项的联接件,其中,支撑部是卡扣配合部。
<<结构例C50>>
根据结构例C1-结构例C49中任一项的联接件,其中,支撑部与联接件的内表面连接。
<<结构例C51>>
根据结构例C1-结构例C50中任一项的联接件,其中,支撑部至少沿联接件的周向延伸。
<<结构例C52>>
根据结构例C1-结构例C51中任一项的联接件,其中,当沿着联接件的轴线观察时,支撑部与从驱动接收部自由端引出的驱动接收部法线交叉。
<<结构例C53>>
根据结构例C1-结构例C52中任一项的联接件,其中,支撑部在相对于联接件轴线以30°-90°角度倾斜的方向上延伸。
<<结构例C54>>
根据结构例C1-结构例C53中任一项的联接件,其中,支撑部在相对于联接件轴线以50°-90°角度倾斜的方向上延伸。
<<结构例C55>>
根据结构例C1-结构例C54中任一项的联接件,其中,支撑部在基本上垂直于联接件轴线的方向上延伸。
<<结构例C56>>
根据结构例C1至结构例C55中任一项的联接件,其中,当支撑部的固定端和驱动力接收部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例C57>>
根据结构例C1-结构例C56中任一项的联接件,其中,支撑部相对于垂直于联接件轴线的方向倾斜地延伸。
<<结构例C58>>
根据结构例C1-结构例C57中任一项的联接件,其中,支撑部基本上平行于所述轴向延伸。
<<结构例C59>>
根据结构例C58的联接件,还包括:驱动力接收部件,其设置有驱动力接收部和支撑部;以及被力传递部件,驱动力从驱动力接收部传递到被力传递部件。
<<结构例C60>>
根据结构例C59的联接件,其中,驱动力接收部件能够相对于被力传递部件在联接件的周向上移动。
<<结构例C61>>
根据结构例C59或结构例C60的联接件,其中,驱动力接收部件可移动地由被力传递部件支撑。
<<结构例C62>>
根据结构例C59-结构例C61中任一项的联接件,其中,被力传递部件包括被力传递部,被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部相对于联接件的径向设置在驱动力接收部的自由端的外侧。
<<结构例C63>>
根据结构例C59-结构例C62中任一项的联接件,其中,驱动力接收部件能够相对于被力传递部件在联接件的周向上移动。
<<结构例C64>>
根据结构例C59-结构例C63中任一项的联接件,其中,驱动力接收部件能够围绕联接件的轴线相对于被力传递部件旋转。
<<结构例C65>>
根据结构例C59-结构例C64中任一项的联接件,其中,被力传递部件与驱动力接收部件不是一体的。
<<结构例C66>>
根据结构例C1-结构例C65中任一项的联接件,其中,联接件设置有撑靠部,用于限制驱动力接收部在联接件周向上的运动。
<<结构例C67>>
根据结构例C67的联接件,其中,撑靠部在与设置有驱动力接收部的一侧相反的一侧上与支撑部相对。
<<结构例C68>>
根据结构例C66或结构例C67的联接件,其中,撑靠部设置有倾斜部。
<<结构例C69>>
根据结构例C68的联接件,其中,支撑部的倾斜部倾斜成使得产生把驱动力接收部至少朝联接件径向内侧的方向推压的力。
<<结构例C70>>
根据结构例C68或结构例C69的联接件,其中,倾斜部相对于驱动力接收部倾斜。
<<结构例C71>>
根据结构例C66-结构例C70中任一项的联接件,其中,联接件包括能够与驱动力接收部一起移动的被推压部,并且撑靠部通过接触被推压部而把驱动力接收部至少朝联接件径向内侧推压。
<<结构例C72>>
根据结构例C71的联接件,其中,支撑部设置有被推压部。
<<结构例C73>>
根据结构例C1-结构例C72中任一项的联接件,其中,联接件包括:(1)设置有驱动力接收部和支撑部的驱动力接收部件,以及(2)与驱动力接收部件不是一体的并且设置有撑靠部的撑靠部件。
<<结构例C74>>
根据结构例C1-结构例C73中任一项的联接件,其中,联接件包括:(1)设置有驱动力接收部和支撑部的驱动力接收部件,以及(2)具有撑靠部的撑靠部件,并且其中,驱动力接收部件能够相对于撑靠部件旋转。
<<结构例C75>>
一种用于电子照相成像设备的联接件,联接件包括:
板状部,其设置有用于接收驱动力的驱动力接收部;以及
被力传递部件,其配置成从板状部接收驱动力。
<<结构例C76>>
根据结构例C75的联接件,其中,板状部能够相对于被力传递部件至少在联接件的径向上移动。
<<结构例C77>>
根据结构例C75或结构例C76的联接件,其中,板状部被支撑成能够相对于被力传递部件至少在联接件的周向上移动。
<<结构例C78>>
根据结构例C75-结构例C77中任一项的联接件,其中,被力传递部件包括用于通过接触板状部而从驱动力接收部件接收驱动力的被力传递部,并且被力传递部与设置有驱动力接收部的板状部侧相反的一侧接触。
<<结构例C79>>
根据结构例C75-结构例C78中任一项的联接件,其中,被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例C80>>
根据结构例C75-结构例C79中任一项的联接件,其中,板状部包括设置有驱动力接收部的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、设置在第一部分和第二部分之间的弯曲部。
<<结构例C81>>
根据结构例C80的联接件,其中,第一部分至少朝联接件的径向内侧突出,并且第二部分至少沿联接件的周向延伸。
<<结构例C82>>
根据结构例C80或结构例C81的联接件,其中,第一部分相对于联接件的径向倾斜。
<<结构例C83>>
根据结构例C80-结构例C82中任一项的联接件,其中,第一部分倾斜成使得当接收驱动力时产生把驱动力接收部至少朝联接件径向内侧推压的力。
<<结构例C84>>
根据结构例C75-结构例C83中任一项的联接件,其中,板状部相对于被力传递部件是可移动的。
<<结构例C85>>
根据结构例C75-结构例C84中任一项的联接件,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例C86>>
根据结构例C75-结构例C85中任一项的联接件,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例C87>>
根据结构例C75-结构例C86中任一项的联接件,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例C88>>
根据结构例C75-结构例C86中任一项的联接件,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例C89>>
根据结构例C75-结构例C88中任一项的联接件,其中,板状部由金属制成。
<<结构例C90>>
根据结构例C75-结构例C89中任一项的联接件,其中,板状部是板簧。
<<结构例C91>>
根据结构例C1-结构例C90中任一项的联接件,其中,联接件设置有相对于所述轴向朝外侧开口的凹部。
<<结构例C92>>
根据结构例C91的联接件,其中,凹部具有相对于所述轴向朝向联接件的内侧收窄的形状。
<<结构例C93>>
根据结构例C91或结构例C92的联接件,其中,凹部为基本上锥形的凹部。
<<结构例C94>>
根据结构例C91-结构例C93中任一项的联接件,其中,联接件包括设置有驱动力接收部的驱动力接收部件以及设置有所述凹部的定位部件。
<<结构例C95>>
根据结构例C94的联接件,其中,定位部件或驱动力接收部件设置有用于将定位部件安装到驱动力接收部的卡扣配合部。
<<结构例C96>>
根据结构例C94或结构例C95的联接件,其中,定位部件能够通过相对于驱动力接收部件旋转而从驱动力接收部件拆卸。
<<结构例C97>>
一种用于电子照相成像设备的联接件,联接件包括:
联接件包括配置成接收驱动力的卡扣配合部,卡扣配合部至少在联接件的周向上延伸。
<<结构例D1>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,
(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分设置在感光鼓的内部。
<<结构例D2>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,支撑部至少在联接件的周向上延伸。
<<结构例D3>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,驱动力接收部设置有倾斜部,其相对于驱动力接收部的移动方向倾斜。
<<结构例D4>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,
(II-II)支撑部,其可移动地支撑驱动力接收部,
其中,驱动力接收部相对于联接件的轴向设置在支撑部的固定端内侧。
<<结构例D5>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部;以及
(III)配置成可旋转地被支撑的被支承部,
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分在联接件的轴向上比被支承部更靠鼓单元的内侧。
<<结构例D6>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其安装在感光鼓上,联接件包括:
(II-I)驱动力接收部件,其具有驱动力接收部,驱动力接收部配置成进入凹部并接收用于旋转感光鼓的驱动力,以及
(II-II)被力传递部件,驱动力从驱动力接收部件传递到被力传递部件,
其中,驱动力接收部件能够在联接件的周向上相对于被力传递部件移动。
<<结构例D7>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)设置在感光鼓上的联接件,其包括,
(II-I)驱动力接收部,其配置成进入凹部并能够接收用于旋转感光鼓的驱动力,以及
(II-II)支撑部,其具有自由端和固定端,并且至少在联接件的轴向上延伸,支撑部可移动地支撑驱动力接收部并且至少部分地设置在联接件的内部,
其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例D8>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
感光鼓;以及
联接件,其设置在感光鼓上,联接件包括:(I)驱动力接收部,其配置成进入凹部并且接收用于旋转感光鼓的驱动力,(II)定位部,其相对于联接件的轴向设置在驱动力接收部的内侧,并配置成相对于驱动轴定位联接件。
<<结构例D9>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部件,以及
(II-II)撑靠部件,其与驱动力接收部件不是一体的,
驱动力接收部件包括(II-I-I)驱动力接收部,其配置成进入凹部和接收用于旋转感光鼓的驱动力,以及(II-I-II)可移动地支撑驱动力接收部的支撑部,以及
撑靠部件包括(II-II-I)用于限制驱动力接收部在联接件周向上移动的撑靠部。
<<结构例D10>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,
(II-II)支撑部,其可移动地支撑驱动力接收部,以及
其中,当支撑部、驱动力接收部和感光鼓投影到联接件的轴线上,支撑部或驱动力接收部的至少一部分投影范围和感光鼓的至少一部分投影范围彼此重叠。
<<结构例D11>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,
(II-II)支撑部,其可移动地支撑驱动力接收部;以及
(III)配置成可旋转地被支撑的被支承部,
其中,当支撑部、驱动力接收部和被支承部投影到联接件的轴向上,支撑部或驱动力接收部的至少一部分投影范围与被支承部的至少一部分投影范围重叠。
<<结构例D12>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部,并配置成当驱动力接收部接收驱动力时支撑部卷绕在驱动轴上。
<<结构例D13>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)可动的驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,
(II-II)被推压部,其能够与驱动力接收部一起移动,以及
(II-III)用于限制驱动力接收部在联接件周向上运动的撑靠部,撑靠部在接触被推压部时向凹部内推压驱动力接收部。
<<结构例D14>>
根据结构例D13的鼓单元,其中,联接件包括可动地支撑驱动力接收部的支撑部。
<<结构例D15>>
根据结构例D14的鼓单元,其中,被推压部设置在支撑部上。
板状部
<<结构例D16>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
(I)感光鼓;以及
(II)联接件,其设置在感光鼓上,联接件包括:
(II-I)板状部,其设置有驱动力接收部,并配置成进入凹部以及接收用于旋转感光鼓的驱动力,以及
(II-II)被力传递部件,其配置成从板状部接收驱动力。
<<结构例D17>>
根据结构例D16的鼓单元,其中,板状部包括可旋转地支撑驱动力接收部的支撑部。
<<结构例D18>>
根据结构例D16或结构例D17的鼓单元,其中,被力传递部件包括被力传递部,该被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部能够与在设置有驱动力接收部的表面的相反侧的板状部表面接触。
<<结构例D19>>
根据结构例D16-结构例D18中任一项的鼓单元,其中,被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例D20>>
根据结构例D16-结构例D19中任一项的鼓单元,其中,板状部包括设置有驱动力接收部并且未被被力传递部件覆盖的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、设置在第一部分和第二部分之间的弯曲部。
<<结构例D21>>
根据结构例D16-结构例D20中任一项的鼓单元,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例D22>>
根据结构例D16-结构例D21中任一项的鼓单元,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例D23>>
根据结构例D16-结构例D22中任一项的鼓单元,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例D24>>
根据结构例D16-结构例D23中任一项的鼓单元,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例D25>>
根据结构例D16-结构例D24中任一项的鼓单元,其中,板状部由金属制成。
<<结构例D26>>
根据结构例D16-结构例D25中任一项的鼓单元,其中,驱动力接收部件包括板簧。
<<结构例D27>>
根据结构例D16-结构例D26中任一项的鼓单元,其中,被力传递部件包括被力传递部,被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部相对于联接件的径向设置在驱动力接收部的自由端的外侧。
<<结构例D28>>
根据结构例D1-结构例D27中任一项的鼓单元,其中,支撑部包括能够弹性变形以移动驱动力接收部的变形部。
<<结构例D29>>
根据结构例D1-结构例D28中任一项的鼓单元,其中,支撑部设置有突出部,该突出部设置有驱动力接收部。
<<结构例D30>>
根据结构例D1-结构例D29中任一项的鼓单元,其中,支撑部设置有沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例D31>>
根据结构例D30的鼓单元,其中,延伸部的至少一部分设置在感光鼓内部。
<<结构例D32>>
根据结构例D30或结构例D31的鼓单元,其中,整个延伸部设置在感光鼓内部。
<<结构例D33>>
根据结构例D29-结构例D32中任一项的鼓单元,其中,突出部的至少一部分在感光鼓的内部。
<<结构例D34>>
根据结构例D29-结构例D33中任一项的鼓单元,其中,整个突出部在感光鼓内部。
<<结构例D35>>
根据结构例D30-结构例D34中任一项的鼓单元,其中,突出部从延伸部突出的长度短于延伸部的长度。
<<结构例D36>>
根据结构例D29-结构例D35中任一项的鼓单元,其中,突出部至少向联接件的径向内侧突出。
<<结构例D37>>
根据结构例D1-结构例D36中任一项的鼓单元,其中,驱动力接收部的至少一部分在感光鼓的内部。
<<结构例D38>>
根据结构例D1-结构例D37中任一项的鼓单元,其中,整个支撑部在感光鼓内部。
<<结构例D39>>
根据结构例D1-结构例D38中任一项的鼓单元,其中,支撑部的至少一部分由金属制成。
<<结构例D40>>
根据结构例D1-结构例D39中任一项的鼓单元,其中,支撑部包括金属部和树脂材料部。
<<结构例D41>>
根据结构例D40的鼓单元,其中,金属部的一部分被树脂材料部覆盖,并且其它部分不被树脂材料部覆盖。
<<结构例D41-2>>
根据结构例D39或结构例D40的鼓单元,其中,金属部设置有通孔,至少在通孔中设置有树脂材料部。
<<结构例D42>>
根据结构例D1-结构例D41-2中任一项的鼓单元,其中,支撑部的至少一部分由树脂材料制成。
<<结构例D43>>
根据结构例D1-结构例D42中任一项的鼓单元,其中,在驱动力接收部所设位置处沿着垂直于联接件轴向的平面截取的支撑部横截面形状为非圆形的。
<<结构例D44>>
根据结构例D1-结构例D43中任一项的鼓单元,其中,联接件包括与感光鼓的内周面接触的内周面接触部和相对于联接件的轴向设置在感光鼓外侧的圆筒部。
<<结构例D45>>
根据结构例D44的鼓单元,其中,支撑部由内周面接触部的内表面支撑。
<<结构例D46>>
根据结构例D44的鼓单元,其中,支撑部由圆筒部的内表面支撑。
<<结构例D47>>
根据结构例D1-结构例D46中任一项的鼓单元,其中,联接件包括配置成接触驱动轴外周的接触部,并且接触部相对于联接件的径向设置在驱动力接收部的自由端的外侧并且在支撑部的固定端的内侧。
<<结构例D48>>
根据结构例D47的鼓单元,其中,接触部面向联接件的轴线,并且沿联接件的周向弯曲。
<<结构例D49>>
根据结构例D47或结构例D48的鼓单元,其中,接触部可动地由支撑部支撑。
<<结构例D50>>
根据结构例D47-结构例D49中任一项的鼓单元,其中,接触部和支撑部的固定端投影到联接件的轴线上时,接触部的投影范围和固定端的投影范围至少部分地彼此重叠。
<<结构例D51>>
根据结构例D1-结构例D50中任一项的鼓单元,其中,支撑部的固定端中的至少一部分设置在感光鼓的内部。
<<结构例D52>>
根据结构例D1-结构例D51中任一项的鼓单元,其中,支撑部的固定端全部设置在感光鼓的内部。
<<结构例D53>>
根据结构例D1-结构例D52中任一项的鼓单元,其中,支撑部通过以其固定端作为支点变形而移动驱动力接收部。
<<结构例D54>>
根据结构例D1-结构例D53中任一项的鼓单元,其中,驱动力接收部相对于联接件的径向设置在支撑部的固定端的内侧。
<<结构例D55>>
根据结构例D1-结构例D54中任一项的鼓单元,其中,支撑部的自由端相对于联接件的径向位于支撑部的固定端的内侧。
<<结构例D56>>
根据结构例D1-结构例D55中任一项的鼓单元,其中,支撑部至少沿联接件的轴向延伸。
<<结构例D57>>
根据结构例D1至结构例D56中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向比驱动力接收部更靠鼓单元的内侧。
<<结构例D58>>
根据结构例D1-结构例D57中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向比支撑部的自由端更靠鼓单元的内侧。
<<结构例D59>>
根据结构例D1至结构例D58中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向比驱动力接收部更靠鼓单元的外侧。
<<结构例D60>>
根据结构例D1-结构例D59中任一项的鼓单元,其中,支撑部的固定端相对于联接件的轴向比支撑部的自由端更靠鼓单元的外侧。
<<结构例D61>>
根据结构例D1至结构例D60中任一项的鼓单元,其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例D62>>
根据结构例DA1至结构例D61中任一项的鼓单元,其中,支撑部倾斜离开联接件的内表面。
<<结构例D63>>
根据结构例D1-结构例D62中任一项的鼓单元,其中,支撑部是卡扣配合部。
<<结构例D64>>
根据结构例D1-结构例D63中任一项的鼓单元,其中,支撑部与联接件的内表面连接。
<<结构例D65>>
根据结构例D1-结构例D64中任一项的鼓单元,其中,支撑部至少沿联接件的周向延伸。
<<结构例D66>>
根据结构例D1-结构例D65中任一项的鼓单元,其中,当沿着联接件的轴线观察时,支撑部与从驱动接收部的自由端引出的驱动接收部法线交叉。
<<结构例D67>>
根据结构例D1-结构例D66中任一项的鼓单元,其中,支撑部在相对于联接件轴线以30°-90°角度倾斜的方向上延伸。
<<结构例D68>>
根据结构例D1-结构例D67中任一项的鼓单元,其中,支撑部在相对于联接件轴线以50°-90°角度倾斜的方向上延伸。
<<结构例D69>>
根据结构例D1-结构例D68中任一项的鼓单元,其中,支撑部在基本上垂直于联接件轴线的方向上延伸。
<<结构例D70>>
根据结构例D1至D69中任一项的鼓单元,其中,当支撑部的固定端和驱动力接收部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例D71>>
根据结构例D1-结构例D70中任一项的鼓单元,其中,支撑部相对于垂直于联接件轴线的方向倾斜地延伸。
<<结构例D72>>
根据结构例D1-结构例D71中任一项的鼓单元,其中,支撑部配置成当驱动力接收部接收驱动力时支撑部卷绕在驱动轴上。
<<结构例D73>>
根据结构例D1-结构例D72中任一项的鼓单元,其中,支撑部包括面向联接件轴线并沿着联接件周向延伸的卷绕部,卷绕部配置成通过在驱动力接收部处接收驱动力而接触驱动轴。
<<结构例D74>>
根据结构例D1至D73中任一项的鼓单元,其中,当支撑部的固定端和卷绕部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例D75>>
根据结构例D1-结构例D74中任一项的鼓单元,其中,支撑部基本上平行于所述轴向延伸。
卡扣配合
<<结构例D76>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括设置有凹部的驱动轴,鼓单元包括:
感光鼓;以及
联接件,其设置在感光鼓上,联接件包括驱动力接收部,驱动力接收部包括卡扣配合部,卡扣配合部配置成接合凹部以接收用于旋转感光鼓的驱动力,
其中,卡扣配合部的至少一部分在感光鼓的内部。
<<结构例D77>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括设置有凹部的驱动轴,鼓单元包括:
感光鼓;
联接件,其设置在感光鼓上并包括卡扣配合部,卡扣配合部配置成接合凹部以接收用于旋转感光鼓的驱动力,
其中,卡扣配合部至少在联接件的周向上延伸。
<<结构例D78>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
感光鼓;以及
联接件,其包括卡扣配合部,卡扣配合部配置成接合凹部以接收用于旋转感光鼓的驱动力,
可旋转地被支撑的被支承部,
其中,卡扣配合部的至少一部分相对于联接件的轴向位于被支承部的内侧。
<<结构例D79>>
一种能够可拆卸地安装到电子照相成像设备主组件中的鼓单元,该电子照相成像设备主组件包括具有凹部的驱动轴,鼓单元包括:
感光鼓;以及
联接件,其设置在感光鼓上并配置成接合凹部以接收用于旋转感光鼓的驱动力,
其中,当所述卡扣配合部和感光鼓投影到联接件的轴线上时,卡扣配合部的投影范围的至少一部分和感光鼓的投影范围的至少一部分彼此重叠。
<<结构例D80>>
根据结构例D76-结构例D79中任一项的鼓单元,其中,卡扣配合部包括用于进入凹部以接收驱动力的驱动力接收部。
<<结构例D81>>
根据结构例D1-结构例D80中任一项的鼓单元,其中,驱动力接收部能够至少沿联接件的径向移动。
<<结构例D82>>
根据结构例D1-结构例D81中任一项的鼓单元,其中,整个驱动力接收部在感光鼓的内部。
<<结构例D83>>
根据结构例D1-结构例D82中任一项的鼓单元,其中,驱动力接收部设置有相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例D84>>
根据结构例D1-结构例D83中任一项的鼓单元,其中,驱动力接收部的倾斜部倾斜成使得当从驱动轴接收驱动力时产生把驱动力接收部至少向驱动轴凹部内部推压的力。
<<结构例D85>>
根据结构例D1-结构例D84中任一项的鼓单元,其中,当沿着联接件的轴线观察时,驱动力接收部面向从驱动力接收部的自由端在驱动力接收部径向向外移动的方向上延伸的线。
<<结构例D87>>
根据结构例D1-结构例D86中任一项的鼓单元,其中,联接件包括多个驱动力接收部。
<<结构例D88>>
根据结构例D1-结构例D87中任一项的鼓单元,其中,沿着联接件的轴向观察时,所述多个驱动力接收部基本上以等间隔设置。
<<结构例D89>>
根据结构例D1-结构例D88中任一项的鼓单元,其中,联接件的驱动力接收部的数量是三个。
<<结构例D90>>
根据结构例D1-结构例D89中任一项的鼓单元,其中,联接件的驱动力接收部的数量是两个。
<<结构例D91>>
根据结构例D1-结构例D90中任一项的鼓单元,其中,联接件设置有可变形部,其可弹性地变形以移动驱动力接收部。
<<结构例D92>>
根据结构例D1-结构例D91中任一项的鼓单元,其中,联接件包括与感光鼓内周面接触的内周面接触部和相对于联接件轴向设置在感光鼓外侧的圆筒部。
<<结构例D93>>
根据结构例D1-结构例D92中任一项的盒,其中,联接件包括第一内径部和第二内径部,该第二内径部的内径比第一内径部的内径小。
<<结构例D94>>
根据结构例D1-结构例D93中任一项的鼓单元,其中,联接件设置有用于引导驱动轴插入的引导部。
<<结构例D95>>
根据结构例D1-结构例D94中任一项的鼓单元,其中,驱动力接收部在径向上可移动至少0.6mm。
<<结构例D96>>
根据结构例D1-结构例D95中任一项的鼓单元,其中,驱动力接收部在径向上可移动至少1.0mm。
<<结构例D97>>
根据结构例D1-结构例D95中任一项的鼓单元,其中,驱动力接收部在径向上可移动至少1.2mm。
<<结构例D98>>
根据结构例D1-结构例D97中任一项的鼓单元,其中,支撑部配置成当联接件从驱动轴接收到力时与自由状态相比将驱动力接收部移动到联接件径向外侧的位置。
<<结构例D99>>
根据结构例D1-结构例D98中任一项的鼓单元,其中,联接件包括安装力接收部,用于在安装鼓单元时从驱动轴接收在径向上移动驱动力接收部的力。
<<结构例D100>>
根据结构例D1-结构例D99中任一项的鼓单元,其中,安装力接收部设置有相对于联接件轴线倾斜的倾斜部。
<<结构例D101>>
根据结构例D1-结构例D100中任一项的鼓单元,其中,联接件包括拆卸力接收部,用于在拆卸鼓单元时从驱动轴接收在径向上移动驱动力接收部的力。
<<结构例D102>>
根据结构例D101的鼓单元,其中,拆卸力接收部设置有相对于联接件轴线倾斜的倾斜部。
<<结构例D103>>
根据结构例D1-结构例D102中任一项的鼓单元,其中,驱动力接收部的在联接件轴向上的外侧相对于驱动力接收部的在联接件轴向上的内侧设置在联接件旋转方向的上游侧。
盒
<<结构例D104>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)鼓单元;以及
(II)可旋转地支撑鼓单元的支承部;
鼓单元包括:
(II-I)感光鼓;
(II-II)联接件,其设置在感光鼓上,联接件包括:
(II-II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,
(II-II-II)支撑部,其可移动地支撑驱动力接收部,以及
其中,驱动力接收部的至少一部分和支撑部的至少一部分相对于联接件的轴向位于所述被支承部的内侧。
<<结构例D105>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)鼓单元;以及
(II)可旋转地支撑鼓单元的支承部;
鼓单元包括:
(II-I)感光鼓;
(II-II)联接件,其设置在感光鼓上,联接件包括:
(II-II-I)驱动力接收部,其配置成进入凹部并接收用于旋转感光鼓的驱动力,以及
(II-II-II)支撑部,其可移动地支撑驱动力接收部,
其中,当驱动力接收部、支撑部和支承部投影到联接件的轴线上,驱动力接收部和支撑部的至少一部分投影范围与支承部的至少一部分投影范围重叠。
<<结构例E1>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可动地支撑驱动力接收部的支撑部;
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分在可旋转部件的内部。
<<结构例E2>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可动地支撑驱动力接收部的支撑部;
其中,支撑部至少在联接件的周向上延伸。
<<结构例E3>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可动地支撑驱动力接收部的支撑部;
驱动力接收部设置有倾斜部,其相对于驱动力接收部的移动方向倾斜。
<<结构例E4>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括,
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转可旋转部件的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部,以及
其中,驱动力接收部相对于联接件的轴向在支撑部的内侧。
<<结构例E5>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;
(II)联接件,其包括,
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转可旋转部件的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部;以及
(III)配置成可旋转地被支撑的被支承部,
其中,支撑部的至少一部分和/或驱动力接收部的至少一部分相对于联接件的轴向比被支承部更靠盒的内侧。
<<结构例E6>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括(II-I)驱动力接收部件,该驱动力接收部件具有驱动力接收部,以用于进入凹部从而接收用于旋转可旋转部件的驱动力,以及(II-II)被力传递部件,驱动力从驱动力接收部件传递到被力传递部件,
其中,驱动力接收部件能够在联接件的周向上相对于被力传递部件移动。
<<结构例E7>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括,
(II-I)驱动力接收部,其配置成进入凹部并能够接收用于旋转可旋转部件的驱动力,以及
(II-II)支撑部,其具有自由端和固定端,并且至少在联接件的轴向上延伸,支撑部可移动地支撑驱动力接收部并且至少部分地设置在联接件的内部,
其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例E8>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
可旋转部件,在其表面上承载显影剂的同时旋转;以及
联接件,其包括:(I)驱动力接收部,其配置成进入凹部并且接收用于旋转可旋转部件的驱动力,(II)定位部,其相对于联接件的轴向设置在驱动力接收部的内侧,并配置成相对于驱动轴定位联接件。
<<结构例E9>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括,
(II-I)驱动力接收部件,以及
(II-II)撑靠部件,其与驱动力接收部件不是一体的;
驱动接收部件包括(II-I-I)驱动力接收部,其配置成进入凹部和接收用于旋转可旋转部件的驱动力,以及(II-I-II)可移动地支撑驱动力接收部的支撑部,以及
撑靠部件包括(II-II-I)用于限制驱动力接收部在联接件周向上移动的撑靠部。
<<结构例E10>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括(II-I)驱动力接收部,其配置成接收用于旋转可旋转部件的驱动力,以及(II-II)可动地支撑驱动力接收部的支撑部;
其中,当支撑部、驱动力接收部和可旋转部件投影到联接件的轴线上,支撑部或驱动力接收部的至少一部分投影范围与可旋转部件的至少一部分投影范围重叠。
<<结构例E11>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;
(II)联接件,其包括,
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转可旋转部件的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部;以及
(III)配置成可旋转地被支撑的被支承部,
其中,当支撑部、驱动力接收部和被支承部投影到联接件的轴线上,支撑部或驱动力接收部的投影范围和被支承部的投影范围至少部分地彼此重叠。
<<结构例E12>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,联接件包括:
(II-I)驱动力接收部,其配置成进入凹部并接收用于旋转可旋转部件的驱动力,以及
(II-II)支撑部,其可移动地支撑驱动力接收部,并配置成当驱动力接收部接收驱动力时支撑部卷绕在驱动轴上。
<<结构例E13>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括,
(II-I)可动的驱动力接收部,其配置成进入凹部并接收用于旋转可旋转部件的驱动力,
(II-II)被推压部,其能够与驱动力接收部一起移动,以及
(II-III)用于限制驱动力接收部在联接件周向上运动的撑靠部,撑靠部在接触被推压部时向凹部内部推压驱动力接收部。
<<结构例E14>>
根据结构例E13的盒,其中,联接件包括可动地支撑驱动力接收部的支撑部。
<<结构例E15>>
根据结构例E14的盒,其中,支撑部设置有被推压部。
<<结构例E16>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
(I)可旋转部件,在其表面上承载显影剂的同时旋转;以及
(II)联接件,其包括,
(II-I)板状部,其设置有驱动力接收部,驱动力接收部配置成进入凹部以及接收用于旋转可旋转部件的驱动力,以及
(II-II)被力传递部件,其配置成从板状部接收驱动力。
<<结构例E17>>
根据结构例E16的盒,其中,板状部包括可动地支撑驱动力接收部的支撑部。
<<结构例E18>>
根据结构例E16或结构例E17的盒,其中,被力传递部件包括被力传递部,该被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且其中,被力传递部能够与在设置有驱动力接收部的表面的相反侧的板状部表面接触。
<<结构例E19>>
根据结构例E16-结构例E18中任一项的盒,其中,被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例E20>>
根据结构例E16-结构例E19中任一项的盒,其中,板状部包括设置有驱动力接收部并且未被被力传递部件覆盖的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、以及设置在第一部分和第二部分之间通过弯曲板状部形成的弯曲部。
<<结构例E21>>
根据结构例E16-结构例E20中任一项的盒,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例E22>>
根据结构例E16-结构例E21中任一项的盒,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例E23>>
根据结构例E16-结构例E22中任一项的盒,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例E24>>
根据结构例E16-结构例E23中任一项的盒,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例E25>>
根据结构例E16-结构例E24中任一项的盒,其中,板状部由金属制成。
<<结构例E26>>
根据结构例E16-结构例E25中任一项的盒,其中,驱动力接收部件包括板簧。
<<结构例E27>>
根据结构例E16-结构例E26中任一项的盒,其中,被力传递部件包括被力传递部,被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部相对于联接件的径向设置在驱动力接收部的自由端的外侧。
<<结构例E28>>
根据结构例E1-结构例E27中任一项的盒,其中,支撑部设置有能够弹性变形以移动驱动力接收部的变形部。
<<结构例E29>>
根据结构例E1-结构例E28中任一项的盒,其中,支撑部包括突出部,该突出部设置有驱动力接收部。
<<结构例E30>>
根据结构例E1-结构例E29中任一项的盒,其中,支撑部设置有沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例E31>>
根据结构例E30的盒,其中,延伸部的至少一部分在可旋转部件的内部。
<<结构例E32>>
根据结构例E30或结构例E31的盒,其中,整个延伸部在可旋转部件的内部。
<<结构例E33>>
根据结构例E29-结构例E32中任一项的盒,其中,突出部的至少一部分设置在可旋转部件内部。
<<结构例E34>>
根据结构例E29-结构例E33中任一项的盒,其中,整个突出部在可旋转部件的内部。
<<结构例E35>>
根据结构例E30-结构例E34中任一项的盒,其中,突出部从延伸部突出的长度短于延伸部的长度。
<<结构例E36>>
根据结构例E29-结构例E35中任一项的盒,其中,突出部至少向联接件的径向内侧突出。
<<结构例E37>>
根据结构例E1-结构例E36中任一项的盒,其中,驱动力接收部的至少一部分在可旋转部件的内部。
<<结构例E38>>
根据结构例E1-结构例E37中任一项的盒,其中,整个支撑部在可旋转部件的内部。
<<结构例E39>>
根据结构例E1-结构例E38中任一项的盒,其中,支撑部的至少一部分由金属制成。
<<结构例E40>>
根据结构例E1-结构例E39中任一项的盒,其中,支撑部包括金属部和树脂材料部。
<<结构例E41>>
根据结构例E40的盒,其中,金属部的一部分被树脂材料部覆盖,并且其它部分不被树脂材料部覆盖。
<<结构例E41-2>>
根据结构例E40或结构例E41的盒,其中,金属部设置有通孔,至少在通孔中设置有树脂材料部。
<<结构例E42>>
根据结构例E1-结构例E41-2中任一项的盒,其中,支撑部的至少一部分由树脂材料制成。
<<结构例E43>>
根据结构例E1-结构例E42中任一项的盒,其中,在驱动力接收部所设位置处沿着垂直于联接件轴向的平面截取的支撑部横截面形状为非圆形的。
<<结构例E44>>
根据结构例E1-结构例E43中任一项的盒,其中,联接件包括与可旋转部件内周面接触的内周面接触部和相对于联接件轴向设置在可旋转部件外侧的圆筒部。
<<结构例E45>>
根据结构例E44的盒,其中,支撑部由内周面接触部的内表面支撑。
<<结构例E46>>
根据结构例E4的盒,其中,支撑部由圆筒部的内表面支撑。
<<结构例E47>>
根据结构例E1-结构例E46中任一项的盒,其中,联接件包括配置成接触驱动轴外周的接触部,并且接触部相对于联接件的径向设置在驱动力接收部自由端的外侧且在支撑部固定端的内侧。
<<结构例E48>>
根据结构例E47的盒,其中,接触部面向联接件的轴线并且沿联接件的周向弯曲。
<<结构例E49>>
根据结构例E47或结构例E48的盒,其中,接触部可动地由支撑部支撑。
<<结构例E50>>
根据结构例E47-结构例E49中任一项的盒,其中,接触部和支撑部的固定端投影到联接件的轴线上时,接触部的投影范围和固定端的投影范围至少部分地彼此重叠。
<<结构例E51>>
根据结构例E1-结构例E50中任一项的盒,其中,支撑部的固定端的至少一部分设置在可旋转部件的内部。
<<结构例E52>>
根据结构例E1-结构例E51中任一项的盒,其中,支撑部的固定端全部设置在可旋转部件的内部。
<<结构例E53>>
根据结构例E1-结构例E52中任一项的盒,其中,支撑部通过以其固定端作为支点变形而移动驱动力接收部。
<<结构例E54>>
根据结构例E1-结构例E53中任一项的盒,其中,驱动力接收部相对于联接件的径向设置在支撑部的固定端的内侧。
<<结构例E55>>
根据结构例E1-结构例E54中任一项的盒,其中,支撑部的自由端相对于联接件的径向位于支撑部的固定端的内侧。
<<结构例E56>>
根据结构例E1-结构例E55中任一项的盒,其中,支撑部至少沿联接件的轴向延伸。
<<结构例E57>>
根据结构例E1至结构例E56中任一项的盒,其中,支撑部的固定端相对于联接件的轴向比驱动力接收部更靠盒的内侧。
<<结构例E58>>
根据结构例E1-结构例E57中任一项的盒,其中,支撑部的固定端相对于联接件的轴向比支撑部的自由端更靠盒的内侧。
<<结构例E59>>
根据结构例E1至结构例E58中任一项的盒,其中,支撑部的固定端相对于联接件的轴向比驱动力接收部更靠盒的外侧。
<<结构例E60>>
根据结构例E1-结构例E59中任一项的盒,其中,支撑部的固定端相对于联接件的轴向比支撑部的自由端更靠盒的外侧。
<<结构例E61>>
根据结构例E1至结构例E60中任一项的盒,其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例E62>>
根据结构例E1-结构例E61中任一项的盒,其中,支撑部设置有倾斜离开联接件内表面的倾斜部。
<<结构例E63>>
根据结构例E1-结构例E62中任一项的盒,其中,支撑部是卡扣配合部。
<<结构例E64>>
根据结构例E1-结构例E63中任一项的盒,其中,支撑部与联接件的内表面连接。
<<结构例E65>>
根据结构例E1-结构例E64中任一项的盒,其中,支撑部至少沿联接件的周向延伸。
<<结构例E66>>
根据结构例E1-结构例E65中任一项的盒,其中,当沿着联接件的轴线观察时,支撑部与从驱动接收部的自由端引出的驱动接收部法线交叉。
<<结构例E67>>
根据结构例E1-结构例E66中任一项的盒,其中,支撑部在相对于联接件轴线以30°-90°角度倾斜的方向上延伸。
<<结构例E68>>
根据结构例E1-结构例E67中任一项的盒,其中,支撑部在相对于联接件轴线以50°-90°角度倾斜的方向上延伸。
<<结构例E69>>
根据结构例E1-结构例E68中任一项的盒,其中,支撑部在基本上垂直于联接件轴线的方向上延伸。
<<结构例E70>>
根据结构例E1至E69中任一项的盒,其中,当支撑部的固定端和驱动力接收部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例E71>>
根据结构例E1-结构例E70中任一项的盒,其中,支撑部相对于垂直于联接件轴线的方向倾斜地延伸。
<<结构例E72>>
根据结构例E1-结构例E71中任一项的盒,其中,支撑部配置成当驱动力接收部接收驱动力时支撑部卷绕到驱动轴上。
<<结构例E73>>
根据结构例E1-结构例E72中任一项的盒,其中,支撑部包括面向联接件轴线并沿着联接件周向延伸的卷绕部,卷绕部配置成通过在驱动力接收部处接收驱动力而接触驱动轴。
<<结构例E74>>
根据结构例E1至E73中任一项的盒,其中,当支撑部的固定端和卷绕部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例E75>>
根据结构例E1-结构例E74中任一项的盒,其中,支撑部基本上平行于所述轴向延伸。
<<结构例E76>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
可旋转部件,在其表面上承载显影剂的同时旋转;以及
联接件,其包括卡扣配合部,卡扣配合部配置成接合凹部以接收用于旋转可旋转部件的驱动力,
其中,卡扣配合部的至少一部分在可旋转部件的内部。
<<结构例E77>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
可旋转部件,在其表面上承载显影剂的同时旋转;以及
联接件,其包括卡扣配合部,卡扣配合部配置成接合凹部以接收用于旋转可旋转部件的驱动力,
其中,卡扣配合部至少在联接件的周向上延伸。
<<结构例E78>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
可旋转部件,在其表面上承载显影剂的同时旋转;以及
联接件,其包括卡扣配合部,卡扣配合部配置成接合凹部以接收用于旋转可旋转部件的驱动力;
可旋转地被支撑的被支承部,
其中,卡扣配合部的至少一部分相对于联接件的轴向位于被支承部的内侧。
<<结构例E79>>
一种能够可拆卸地安装到电子照相成像设备主组件中的盒,该电子照相成像设备主组件包括设置有凹部的驱动轴,盒包括:
可旋转部件,在其表面上承载显影剂的同时旋转;以及
联接件,其设置在可旋转部件上并配置成接收用于旋转可旋转部件的驱动力,联接件可接合凹部以接收驱动力,
其中,当卡扣配合部和可旋转部件投影到联接件的轴线上时,卡扣配合的投影范围的至少一部分和可旋转部件的投影范围的至少一部分彼此重叠。
<<结构例E80>>
根据结构例E76-结构例E79中任一项的盒,其中,卡扣配合部包括用于进入凹部以接收驱动力的驱动力接收部。
<<结构例E81>>
根据结构例E1-结构例E80中任一项的盒,其中,驱动力接收部能够至少沿联接件的径向移动。
<<结构例E82>>
根据结构例E1-结构例E81中任一项的盒,其中,整个驱动力接收部在可旋转部件的内部。
<<结构例E83>>
根据结构例E1-结构例E82中任一项的盒,其中,驱动力接收部设置有相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例E84>>
根据结构例E1-结构例E83中任一项的盒,其中,驱动力接收部的倾斜部倾斜成使得当从驱动轴接收驱动力时产生把驱动力接收部至少向驱动轴凹部内部推压的力。
<<结构例E85>>
根据结构例E1-结构例E84中任一项的盒,其中,当沿着联接件的轴线观察时,驱动力接收部面向从驱动力接收部的自由端在驱动力接收部径向向外移动的方向上延伸的线。
<<结构例E87>>
根据结构例E1-结构例E86中任一项的盒,其中,联接件包括多个驱动力接收部。
<<结构例E88>>
根据结构例E1-结构例E87中任一项的盒,其中,沿着联接件的轴向观察时,所述多个驱动力接收部基本上以等间隔设置。
<<结构例E89>>
根据结构例E1-结构例E88中任一项的盒,其中,联接件的驱动力接收部的数量是三个。
<<结构例E90>>
根据结构例E1-结构例E89中任一项的盒,其中,联接件的驱动力接收部的数量是两个。
<<结构例E91>>
根据结构例E1-结构例E90中任一项的盒,其中,联接件包括能够弹性变形以移动驱动力接收部的变形部。
<<结构例E92>>
根据结构例E1-结构例E91中任一项的盒,其中,联接件包括与可旋转部件的内周面接触的内周面接触部和相对于联接件轴向设置在可旋转部件外侧的圆筒部。
<<结构例E93>>
根据结构例E1-结构例E92中任一项的盒,其中,联接件包括第一内径部和第二内径部,该第二内径部相对于所述轴向设置在第一内径部的内侧,并且第二内径部的内径比第一内径部的内径小。
<<结构例E94>>
根据结构例E1-结构例E93中任一项的盒,其中,联接件包括用于引导驱动轴插入的引导部。
<<结构例E95>>
根据结构例E1-结构例E94中任一项的盒,其中,驱动力接收部在径向上可移动至少0.6mm。
<<结构例E96>>
根据结构例E1-结构例E95中任一项的盒,其中,驱动力接收部在径向上可移动至少1.0mm。
<<结构例E97>>
根据结构例E1-结构例E95中任一项的盒,其中,驱动力接收部在径向上可移动至少1.2mm。
<<结构例E98>>
根据结构例E1-结构例E97中任一项的盒,其中,支撑部配置成当从驱动轴接收到力时与自由状态相比将驱动力接收部移动到联接件径向外侧的位置。
<<结构例E99>>
根据结构例E1-结构例E98中任一项的盒,其中,联接件包括安装力接收部,以在安装盒时从驱动轴接收用于在径向上移动驱动力接收部的力。
<<结构例E100>>
根据结构例E1-结构例E99中任一项的盒,其中,安装力接收部设置有相对于联接件轴线倾斜的倾斜部。
<<结构例E101>>
根据结构例E1-结构例E100中任一项的盒,其中,联接件包括拆卸力接收部,以在拆卸盒时从驱动轴接收用于在径向上移动驱动力接收部的力。
<<结构例E102>>
根据结构例E101的盒,其中,拆卸力接收部设置有相对于联接件轴线倾斜的倾斜部。
<<结构例E103>>
根据结构例E1-结构例E102中任一项的盒,其中,驱动力接收部的在联接件轴向上的外侧相对于驱动力接收部的在联接件轴向上的内侧设置在联接件旋转方向的上游侧。
<<结构例E104>>
根据结构例E1-结构例E103中任一项的盒,其中,联接件设置成使得与可旋转部件同轴。
<<结构例E105>>
根据结构例E1-结构例E104中任一项的盒,其中,可旋转部件设置有轴,并且联接件设置有用于与该轴连接的安装部。
<<结构例E106>>
根据结构例E1-结构例E105中任一项的盒,其中,联接件轴线和驱动力接收部之间的最短距离比联接件轴线和安装部之间的最短距离长。
<<结构例E107>>
根据结构例E1-结构例E106中任一项的盒,其中,可旋转部件是显影辊。
<<结构例E108>>
根据结构例E1-结构例E107中任一项的盒,其中,可旋转部件是用于将显影剂供给到显影辊的供给辊。
<<结构例E109>>
根据结构例E1-结构例E108中任一项的盒,其中,可旋转部件包括显影辊和用于将显影剂供给到显影辊的供给辊。
<<结构例E110>>
根据结构例E109的盒,其中,驱动力通过供给辊传递到显影辊。
<<结构例E111>>
根据结构例E1-结构例E110中任一项的盒,包括作为可旋转部件的感光鼓。
<<结构例F1>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部,其用于进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;以及
支撑部,其可动地支撑驱动力接收部,
其中,支撑部至少在联接件的周向上延伸。
<<结构例F2>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部,其用于进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;以及
支撑部,其可动地支撑驱动力接收部;
其中,驱动力接收部包括相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例F3>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部件,其包括驱动力接收部,驱动力接收部用于进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;以及
被力传递部件,驱动力从驱动力接收部件传递到被力传递部件,
其中,驱动力接收部件能够在联接件的周向上相对于被力传递部件移动。
<<结构例F4>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部,其配置成进入凹部并且能够接收用于旋转可旋转部件的驱动力,以及
支撑部,其具有自由端和固定端,并且至少沿联接件的轴向延伸,支撑部可动地支撑驱动力接收部并且至少部分地设置在联接件内部;
其中,支撑部和联接件内表面之间的距离从支撑部的固定端侧朝向支撑部的自由端侧增加。
<<结构例F5>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部,其配置成进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;以及
定位部,其面向联接件的轴向并且配置成把联接件相对于驱动轴定位。
<<结构例F6>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部件,以及
撑靠部件,其与驱动力接收部件不是一体的;
驱动接收部件包括:
驱动力接收部,其配置成进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;
支撑部,其可动地支撑驱动力接收部,
其中,撑靠部件包括用于限制驱动力接收部在联接件周向上移动的撑靠部。
<<结构例F7>>
一种联接件,其能够可拆卸地安装到成像设备的主组件上,该电子照相成像设备主组件包括设置有凹部的驱动轴,联接件包括:
驱动力接收部,其配置成进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;以及
支撑部,其可动地支撑驱动力接收部;
其中,当支撑部、驱动力接收部和可旋转部件投影到联接件的轴线上时,支撑部或驱动力接收部的至少一部分投影范围与可旋转部件的至少一部分投影范围重叠。
<<结构例F8>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部,其配置成进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;
被支承部,其配置成可旋转地被支撑,
其中,当支撑部、驱动力接收部和被支承部投影到联接件的轴线上,支撑部或驱动力接收部的投影范围和被支承部的投影范围至少部分地彼此重叠。
<<结构例F9>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
驱动力接收部,其配置成进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;以及
支撑部,其可移动地支撑驱动力接收部,并配置成当驱动力接收部接收驱动力时支撑部卷绕在驱动轴上。
<<结构例F10>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
可移动的驱动力接收部,其配置成进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;
被推压部,其能够与驱动力接收部一起移动;以及
用于限制驱动力接收部在联接件周向上运动的撑靠部,撑靠部在接触被推压部时向凹部内部推压驱动力接收部。
<<结构例F11>>
根据结构例F10的联接件,还包括可动地支撑驱动力接收部的支撑部。
<<结构例F12>>
根据结构例F11的联接件,其中,被推压部设置在支撑部上。
<<结构例F13>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
板状部,其设置有驱动力接收部,该驱动力接收部配置成进入凹部,以接收用于使表面承载显影剂的可旋转部件旋转的驱动力;以及
被力传递部件,其配置成从板状部接收驱动力。
<<结构例F14>>
根据结构例F16的联接件,其中,板状部包括可动地支撑驱动力接收部的支撑部。
<<结构例F15>>
根据结构例F13或结构例F14的联接件,其中,被力传递部件包括被力传递部,该被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且,被力传递部能够与在设置有驱动力接收部的表面的相反侧的板状部表面接触。
<<结构例F16>>
根据结构例F13-结构例F15中任一项的联接件,其中,被力传递部相对于联接件的径向设置在板状部的自由端的外侧。
<<结构例F17>>
根据结构例F13-结构例F16中任一项的联接件,其中,板状部包括设置有驱动力接收部并且未被被力传递部件覆盖的第一部分、设置有支撑部并且在与第一部分交叉的方向上延伸的第二部分、以及设置在第一部分和第二部分之间通过弯曲板状部而形成的弯曲部。
<<结构例F18>>
根据结构例F13-结构例F17中任一项的联接件,其中,板状部具有厚度不小于0.1mm的部分。
<<结构例F19>>
根据结构例F13-结构例F18中任一项的联接件,其中,板状部具有厚度不小于0.2mm的部分。
<<结构例F20>>
根据结构例F13-结构例F19中任一项的联接件,其中,板状部具有厚度不大于0.7mm的部分。
<<结构例F21>>
根据结构例F13-结构例F19中任一项的联接件,其中,板状部具有厚度不大于0.5mm的部分。
<<结构例F22>>
根据结构例F13-结构例F21中任一项的联接件,其中,板状部由金属制成。
<<结构例F23>>
根据结构例F13-结构例F22中任一项的联接件,其中,板状部是板簧。
<<结构例F24>>
根据结构例F13-结构例F23中任一项的联接件,其中,被力传递部件包括被力传递部,被力传递部配置成通过接触板状部而从驱动力接收部件接收驱动力,并且被力传递部相对于联接件的径向设置在驱动力接收部的自由端的外侧。
<<结构例F25>>
根据结构例F1-结构例F24中任一项的联接件,其中,支撑部包括能够弹性变形的变形部以移动驱动力接收部。
<<结构例F26>>
根据结构例F1-结构例F25中任一项的联接件,其中,支撑部包括突出部,该突出部设置有驱动力接收部。
<<结构例F27>>
根据结构例F1-结构例F26中任一项的联接件,其中,支撑部设置有沿与突出部的突出方向交叉的方向延伸的延伸部。
<<结构例F28>>
根据结构例F30-结构例F27中任一项的联接件,其中,突出部从延伸部突出的长度短于延伸部的长度。
<<结构例F29>>
根据结构例F26-结构例F28中任一项的联接件,其中,突出部至少朝联接件的径向内侧突出。
<<结构例F30>>
根据结构例F1-结构例F29中任一项的联接件,其中,支撑部的至少一部分由金属制成。
<<结构例F31>>
根据结构例F1-结构例F30中任一项的联接件,其中,支撑部包括金属部和树脂材料部。
<<结构例F32>>
根据结构例F31的联接件,其中,金属部的一部分被树脂材料部覆盖,并且其它部分不被树脂材料部覆盖。
<<结构例F32-2>>
根据结构例F30或结构例F31的联接件,其中,金属部设置有通孔,至少在通孔中设置有树脂材料部。
<<结构例F33>>
根据结构例F1-结构例F32-2中任一项的联接件,其中,支撑部的至少一部分由树脂材料制成。.
<<结构例F34>>
根据结构例F1-结构例F33中任一项的联接件,其中,在驱动力接收部所设的位置处沿着垂直于联接件轴向的平面截取的支撑部横截面形状为非圆形的。
<<结构例F35>>
根据结构例F1-结构例F34中任一项的联接件,其中,联接件包括配置成接触驱动轴外周的接触部,并且接触部相对于联接件的径向设置在驱动力接收部的自由端的外侧和支撑部的固定端的内侧。
<<结构例F36>>
根据结构例F35的联接件,其中,接触部面向联接件的轴线并且沿联接件的周向弯曲。
<<结构例F37>>
根据结构例F35或结构例F36的联接件,其中,接触部由支撑部可动地支撑。
<<结构例F38>>
根据结构例F35-结构例F37中任一项的联接件,其中,接触部和支撑部的固定端投影到联接件的轴线上时,接触部的投影范围和固定端的投影范围至少部分地彼此重叠。
<<结构例F39>>
根据结构例F1-结构例F38中任一项的联接件,其中,支撑部通过以其固定端作为支点变形而移动驱动力接收部。
<<结构例F40>>
根据结构例F1-结构例F39中任一项的联接件,其中,驱动力接收部相对于联接件的径向设置在支撑部的固定端的内侧。
<<结构例F41>>
根据结构例F1-结构例F40中任一项的联接件,其中,支撑部的自由端相对于联接件的径向位于支撑部的固定端的内侧。
<<结构例F42>>
根据结构例F1-结构例F41中任一项的联接件,其中,支撑部至少沿联接件的轴向延伸。
<<结构例F43>>
根据结构例F1至结构例F42中任一项的联接件,其中,联接件包括这样一部分,在该部分中,支撑部距联接件内表面的距离从支撑部的固定端侧朝向自由端侧增加。
<<结构例F44>>
根据结构例F1-结构例F42中任一项的联接件,其中,支撑部设置有倾斜离开联接件内表面的倾斜部。
<<结构例F45>>
根据结构例F1-结构例F44中任一项的联接件,其中,支撑部是卡扣配合部。
<<结构例F46>>
根据结构例F1-结构例F45中任一项的联接件,其中,支撑部与联接件的内表面连接。
<<结构例F47>>
根据结构例F1-结构例F46中任一项的联接件,其中,支撑部至少沿联接件的周向延伸。
<<结构例F48>>
根据结构例F1-结构例F47中任一项的联接件,其中,当沿着联接件的轴线观察时,支撑部与从驱动接收部的自由端引出的驱动接收部法线交叉。
<<结构例F49>>
根据结构例F1-结构例F48中任一项的联接件,其中,支撑部在相对于联接件轴线以30°-90°角度倾斜的方向上延伸。
<<结构例F50>>
根据结构例F1-结构例F49中任一项的联接件,其中,支撑部在相对于联接件轴线以50°-90°角度倾斜的方向上延伸。
<<结构例F51>>
根据结构例F1-结构例F50中任一项的联接件,其中,支撑部在基本上垂直于联接件轴线的方向上延伸。
<<结构例F52>>
根据结构例F1至结构例F51中任一项的联接件,其中,当支撑部的固定端和驱动力接收部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例F53>>
根据结构例F1-结构例F52中任一项的联接件,其中,支撑部相对于垂直于联接件轴线的方向倾斜地延伸。
<<结构例F54>>
根据结构例F1-结构例F53中任一项的联接件,其中,支撑部配置成当驱动力接收部接收驱动力时支撑部卷绕在驱动轴上。
<<结构例F55>>
根据结构例F1-结构例F54中任一项的联接件,其中,支撑部包括面向联接件轴线并沿着联接件周向延伸的卷绕部,卷绕部配置成通过在驱动力接收部处接收驱动力而接触驱动轴。
<<结构例F56>>
根据结构例F55的联接件,其中,当支撑部的固定端和卷绕部投影到联接件的轴线上时,它们的投影范围至少部分地彼此重叠。
<<结构例F57>>
根据结构例F1-结构例F56中任一项的联接件,其中,支撑部基本上平行于所述轴向延伸。
<<结构例F58>>
一种联接件,其能够与设置在电子照相成像设备主组件中并且设置有凹部的驱动轴联接和脱离,联接件包括:
卡扣配合部,其配置成与凹部接合以接收用于使在表面上承载显影剂的可旋转部件旋转的驱动力,卡扣配合部至少在联接件的周向上延伸。
<<结构例F59>>
根据结构例F1-结构例F57中任一项的联接件,其中,卡扣配合部包括驱动力接收部,驱动力接收部用于进入凹部以接收驱动力。
<<结构例F60>>
根据结构例F1-结构例F58中任一项的联接件,其中,驱动力接收部能够至少沿联接件的径向移动。
<<结构例F61>>
根据结构例F1-结构例F60中任一项的联接件,其中,驱动力接收部设置有相对于驱动力接收部的移动方向倾斜的倾斜部。
<<结构例F62>>
根据结构例F1-结构例F61中任一项的联接件,其中,驱动力接收部的倾斜部倾斜成使得当从驱动轴接收驱动力时产生把驱动力接收部至少向联接件径向内侧推压的力。
<<结构例F63>>
根据结构例F1-结构例F62中任一项的联接件,其中,当沿着联接件的轴线观察时,驱动力接收部面向从驱动力接收部的自由端在驱动力接收部径向向外移动方向上延伸的线。
<<结构例F64>>
根据结构例F1-结构例F63中任一项的联接件,其中,联接件包括多个驱动力接收部。
<<结构例F65>>
根据结构例F64的联接件,其中,沿着联接件的轴向观察时,所述多个驱动力接收部基本上以等间隔设置。
<<结构例F66>>
根据结构例F1-结构例F65中任一项的联接件,其中,联接件的驱动力接收部的数量是三个。
<<结构例F67>>
根据结构例F64或结构例F65的联接件,其中,联接件的驱动力接收部的数量是两个。
<<结构例F68>>
根据结构例F1-结构例F67中任一项的联接件,其中,联接件包括能够弹性变形以移动驱动力接收部的变形部。
<<结构例F69>>
根据结构例F1-结构例F68中任一项的联接件,其中,联接件包括用于引导驱动轴插入的引导部。
<<结构例F70>>
根据结构例F1-结构例F69中任一项的联接件,其中,驱动力接收部在径向上可移动至少0.6mm。
<<结构例F71>>
根据结构例F1-结构例F70中任一项的联接件,其中,驱动力接收部在径向上可移动至少1.0mm。
<<结构例F72>>
根据结构例F1-结构例F71中任一项的联接件,其中,驱动力接收部在径向上可移动至少1.2mm。
<<结构例F73>>
根据结构例F1-结构例F72中任一项的联接件,其中,支撑部配置成当从驱动轴接收到力时与自由状态相比将驱动力接收部移动到联接件径向外侧的位置。
<<结构例F74>>
根据结构例F1-结构例F73中任一项的联接件,其中,联接件包括安装力接收部,以在安装盒时从驱动轴接收用于在径向上移动驱动力接收部的力。
<<结构例F75>>
根据结构例F1-结构例F74中任一项的联接件,其中,安装力接收部设置有相对于联接件轴线倾斜的倾斜部。
<<结构例F76>>
根据结构例F1-结构例F75中任一项的联接件,其中,联接件包括拆卸力接收部,以在拆卸盒时从驱动轴接收用于在径向上移动驱动力接收部的力。
<<结构例F77>>
根据结构例F76的联接件,其中,拆卸力接收部设置有相对于联接件轴线倾斜的倾斜部。
<<结构例F78>>
根据结构例F1-结构例F77中任一项的联接件,其中,联接件设置有用于与可旋转部件的轴连接的安装部。
<<结构例F78-2>>
根据结构例F1-结构例F78中任一项的联接件,其中,联接件轴线和驱动力接收部之间的最短距离比联接件轴线和安装部之间的最短距离长。
<<结构例F79>>
根据结构例F1-结构例F78-2的联接件,其中,联接件用于将驱动力传递到作为可旋转部件的显影辊。
<<结构例F80>>
根据结构例F1-结构例F79中任一项的联接件,其中,联接件用于将驱动力传递到作为可旋转部件的显影辊和将显影剂供给到显影辊的供给辊。
<<结构例F81>>
根据结构例F1-结构例F80中任一项的联接件,其中,联接件用于将驱动力传递到作为可旋转部件的感光鼓。
<<结构例G>>
一种盒,包括:根据上述结构例中任一项的鼓单元;以及支承部,其可旋转地支撑鼓单元。
<<结构例H>>
一种成像设备,其包括成像设备主组件和根据前述结构例中任一项的鼓单元。
<<结构例I>>
一种成像设备,其包括成像设备主组件和根据前述结构例中任一项的盒。
[工业实用性]
根据本发明,提供了可用于采用电子照相处理的成像设备的处理盒、鼓单元、盒和联接件。
[附图标记]
SY、SM、SC、SK:成像部,
1:感光鼓,
7:处理盒,
33:对准部件,
33a:倒锥形,
33b:压配合部,
33c:锁止部,
33d:凸部
33e:接触部,
33f:外圆筒形肋,
33g:内圆筒形肋,
33h:倒锥形的自由端,
39:鼓单元轴承部件,
52:二次转印对置辊,
60:圆筒侧金属模具,
61:安装部侧金属模具,
62:模具分型面,
70:法兰部件,
72:安装部,
74:基部,
75:法兰部,
100:电子照相成像设备(成像设备),
100A:成像设备主组件,
101:主组件驱动轴,
101a:主组件驱动传递凹槽,
101b:主组件驱动传递表面,
101c:半球形,
101d:支承部,
101e:齿轮部,
101f:轴部,
101g:粗略引导部,
101h:半球形中心,
101i:主组件侧拆卸锥部,
102:轴承部件,以及
103:弹簧部件。
- 鼓单元、盒和联接件
- 鼓单元、盒和联接件