炉下清渣机遥控系统及方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及清渣机技术领域,特别是涉及一种在转炉不停炉工艺下炉下清渣机遥控系统及方法。
背景技术
随着冶炼工业的发展,以及国内冶金大物流装备的变革、与发展,以及国家环保对冶金、冶炼渣转运的高规格要求,尤其是设备、人员安全、职业健康、以及技术水平的提升,物联网技术越来越多的应用到民用、及工业现场。
中冶宝钢技术服务有限公司在炉下清渣设备有这十多年研发、制造经验,其中智能ZYJ-65遥控装载机有着十分高的市场口碑,也获得了广泛的市场应用。但炉下清渣作业一直以来存在诸多痛点:安全事故频发、作业环境恶劣、管理运营成本高,而转炉掉渣坠落风险,噪音污染严重等已引起诸多问题。而随着网联化、智能化技术的发展,大力发展视距、超视距遥控驾驶技术,使作业人员远离一线作业环境成为一种可能。若能实现装载机的超视距遥控驾驶,可将各种风险大幅降低,同时改善了作业人员的作业环境,降低驾驶操控难度,对于解决司机招聘困难的问题也有很大程度的缓解。
该发明一种炉下清渣机超视距控制系统配合炉下清渣机,可以在钢铁冶炼转炉不停炉作业工艺下,实现炉下红热钢渣清渣作业。超视距控制技术的应用让炉下清渣作业与转炉控制作业控制在一个操作室内,实现作业控制沟通更直接;具备长时间作业、多机联控作业(一机多控、多机同控),贴近智能化、无人化工厂建设,同时进一步提高作业安全,以及高危区域的职业健康控制。
因此,希望能够解决如何远程进行清渣机遥控作业的问题。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种炉下清渣机遥控系统及方法,用于解决现有技术中如何远程进行清渣机遥控作业的问题。
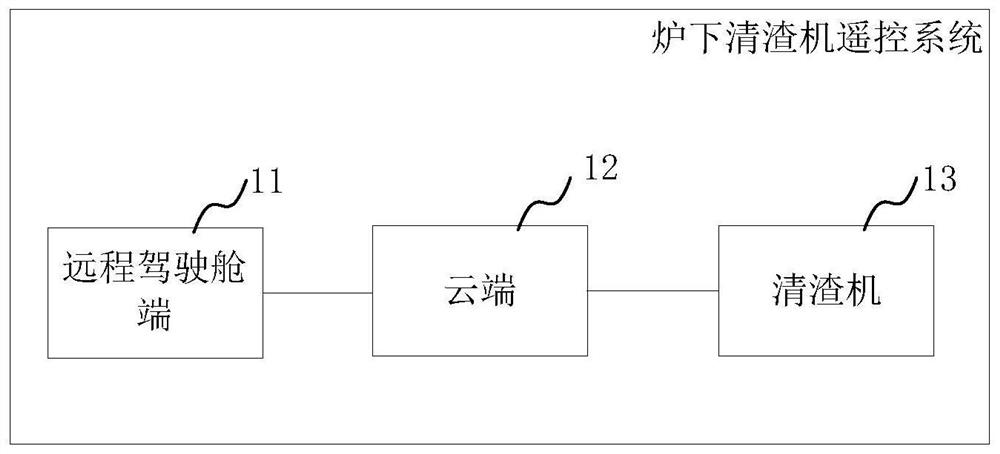
为实现上述目的及其他相关目的,本发明提供一种炉下清渣机遥控系统,所述系统包括:远程驾驶舱端、云端和清渣机;所述远程驾驶舱端用于将车辆控制指令发送至所述云端;所述云端用于转发所述车辆控制指令至所述清渣机;所述清渣机用于基于所述车辆控制指令进行相应操作。
为实现上述目的,本发明还提供一种炉下清渣机遥控方法,包括:基于远程驾驶舱端将车辆控制指令发送至云端;基于所述云端转发所述车辆控制指令至清渣机;基于所述清渣机基于所述车辆控制指令进行相应操作。
如上所述,本发明的一种炉下清渣机遥控系统及方法,具有以下有益效果:用于远程控制清渣机进行炉下清渣、运渣。
附图说明
图1a显示为本发明的炉下清渣机遥控系统于一实施例中的结构示意图;
图1b显示为本发明的炉下清渣机遥控系统于又一实施例中的结构示意图;
图1c显示为本发明的炉下清渣机遥控系统于一实施例中的远程驾驶舱端的结构示意图;
图1d显示为本发明的炉下清渣机遥控系统于一实施例中的清渣机的结构示意图;
图1e显示为本发明的炉下清渣机遥控系统于再一实施例中的结构示意图;
图2显示为本发明的炉下清渣机遥控方法于一实施例中的流程示意图。
元件标号说明
11 远程驾驶舱端
111 舱端VCU
112 舱端控制单元
113 舱端网关设备
12 云端
13 清渣机
131 车载网关设备
132 车辆控制单元
133 车辆VCU
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,故图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
本发明的炉下清渣机遥控系统及方法,用于远程控制清渣机进行炉下清渣、运渣。
如图1a所示,于一实施例中,本发明的炉下清渣机13遥控系统,包括:远程驾驶舱端11、云端12和清渣机13;所述远程驾驶舱端11用于将车辆控制指令发送至所述云端12;所述云端12用于转发所述车辆控制指令至所述清渣机13;所述清渣机13用于基于所述车辆控制指令进行相应操作。
具体地,如图1b所示,于一实施例中,所述远程驾驶舱端11用于将车辆控制指令发送至所述云端12包括:所述远程驾驶舱端11包括舱端VCU111、舱端控制单元112和舱端网关设备113;所述舱端VCU111用于将车辆控制信息发送至舱端控制单元112;所述舱端控制单元112用于基于所述车辆控制信息生成车辆控制指令并转发至舱端网关设备113;所述舱端网关设备113用于将所述车辆控制指令发送至所述云端12。所述舱端VCU111为整车控制器用于进行车辆控制指令的处理与转发,所述舱端控制单元112即为主控电脑即舱端APU,用于控制所述整车控制器进行车辆控制指令的处理与转发。
具体地,所述远程驾驶舱端11用于将音视频信息发送至所述云端12,以使所述云端12转发所述音视频信息至清渣机13;所述清渣机13用于将音视频信息发送至所述云端12,以使所述云端12转发所述音视频信息至远程驾驶舱端11。所述远程驾驶舱端11或所述清渣机13还包括通讯终端,所述通讯终端用于所述远程驾驶舱端11和所述清渣机13进行通讯。所述远程驾驶舱端11还包括通讯终端,所述通讯终端用于发送音视频信息至云端,以使所述云端转发所述音视频信息至远程驾驶舱端。所述远程驾驶舱端用于将音视频信息发送至所述云端,以使所述云端转发所述音视频信息至清渣机。所述通讯终端包括对讲机、手机等,用于接收音视频信息,所述音视频信息包括控制所述清渣机具体操作的语音或视频指令或进行普通沟通的音视频,所述清渣机具体操作的语音或视频指令用于实现远程的语音或视频操控。所述清渣机13还包括通讯终端,所述通讯终端用于发送音视频信息至云端,以使所述云端转发所述音视频信息至远程驾驶舱端。控制所述清渣机具体操作的语音或视频指令即为音视频对讲信息。
具体地,如图1c所示,所述远程驾驶舱端还包括:操作机构、显示系统和舱端网关设备;所述操作机构包括以下任意一种或多种:座椅、操作手柄、操作面板和脚踏板;所述操作面板包括:照明控制装置、发动机控制装置、油门控制装置、远程遥控机行走运动控制装置、远程遥控机臂控制装置、操作台制动装置和喇叭控制装置。所述操作手柄用于让操作人员进行操作指令的下达。所述操作手柄的操作指令包括:前进、后退、左转、右转、铲斗上翻、铲斗下翻、机臂下降、机臂上升。其中,车辆控制指令是指对于清渣机的远程操作指令。所述操控面板也用于让操作人员进行车辆控制指令的下达。所述操作面板包括:照明控制装置、发动机控制装置、油门控制装置、远程遥控机行走运动控制装置、远程遥控机臂控制装置、操作台制动装置和喇叭控制装置。所述车辆控制指令包括:照明指令、油门指令、运动指令、机臂控制指令、制动指令和喇叭开启或关闭指令。所述照明控制装置用于让操作人员下达照明指令,所述照明指令包括:前灯开关以及后等的开关。所述发动机控制装置用于让操作人员下达发动机指令,所述发动机指令发动机熄火、发动机点火、发动机接通。所述油门控制装置用于让操作人员下达油门指令,所述油门指令指油门大小指令,例如从数字0至数字10依次表示油门逐级增大。所述远程遥控机行走运动控制装置用于让操作人员下达对于清渣机的运动指令,所述运动指令包括:前进、后退、左转、右转。所述远程遥控机臂控制装置用于让操作人员下达对于清渣机的机臂控制指令,所述机臂控制指令包括:铲斗上翻、铲斗下翻、机臂下降、机臂上升。操作台制动装置用于让操作人员下达制动指令,所述制动指令包括:驻车制动和制动解除。所述喇叭控制装置用于让操作人员下达喇叭开启或关闭指令。所述脚踏板用于让操作人员下达制动指令或油门指令。
所述显示系统包括以下任意一种或多种:显示屏、仪表和指示灯。所述指示灯包括以下任意一种或多种:报警灯、指示灯和转向灯。所述显示屏用于显示所述清渣机拍摄的视频。所述仪表用于显示所述清渣机的操作状态,所述操作状态包括:发动机状态、油门状态、运动状态、机臂状态。所述发动机状态是指所述清渣机的发动机当前处于的状态包括:发动机熄火状态、发动机点火状态、发动机接通状态。所述油门状态是指所述清渣机的油门的状态。所述运动状态是指所述清渣机的运动状态包括:前进状态、后退状态、左转状态、右转状态。所述机臂状态是指所述清渣机的机臂状态包括:铲斗上翻状态、铲斗下翻状态、机臂下降状态、机臂上升状态。所述指示灯用于指示所述清渣机的灯光状态,所述灯光状态包括:前灯的开关情况、后灯的开关情况。
所述舱端网关设备包括以下任意一种或多种:CAN网关、5G模组、无线AP、交换机和网络适配器。
具体地,所述操作机构用于获取车辆控制信息,所述操作机构用于转发所述车辆控制信息至舱端VCU,所述显示系统用于获取所述舱端控制单元发送的音视频信息进行展示。
具体地,如图1d所示,于一实施例中,所述清渣机包括:车辆VCU133、车辆控制单元132、摄像装置、雷达装置、车载网关设备131、传感器、阀、机臂、铲斗、灯或喇叭。所述车载网关设备131为交换机。所述雷达装置为激光雷达。所述雷达装置用于雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。所述传感器包括:工作机构传感器、车速传感器和IMU传感器。所述工作机构传感器用于获取所述清渣机的工作状态,所述车速传感器用于获取所述清渣机的车速,所述IMU传感器用于获取所述清渣机的加速度,Inertial measurement unit,简称IMU),是测量物体三轴姿态角及加速度的装置。一般IMU包括三轴陀螺仪及三轴加速度计。所述清渣机还包括控制器VCU用于控制所述传感器和阀。所述阀包括:行走比例阀和转向比例阀用于控制所述清渣机的行走和转向。所述机臂为用于控制所述铲斗的机械臂,所述机臂运动包括机臂下降、机臂上升。所述铲斗运动包括铲斗上翻、铲斗下翻。而、阀、机臂、铲斗、灯或喇叭等具体如何操作都是基于所述车辆控制指令完成的。所述摄像装置用于实时获取所述清渣机周围的音视频信息并通过云端传输至远程驾驶舱端。
具体地,所述清渣机还用于发送车辆数据信息至云端,以使云端转发所述车辆数据信息至所述远程驾驶舱端;所述远程驾驶舱端基于显示系统显示所述车辆数据信息。所述车辆数据信息包括由传感器、雷达探测得到的信息,以及所述清渣机的当前状态信息。所述状态信息包括车速、灯的开关以及喇叭信息。方便远程驾驶舱端对于清渣机的实时掌控。
具体地,所述车载网关设备131用于接收音视频信息和车辆控制指令,转发所述音视频信息和车辆控制指令至所述车辆控制单元132;所述车辆控制单元132解析所述车辆控制指令以生成车辆控制信息,转发所述车辆控制信息至所述车辆VCU133;以使所述车辆VCU133基于所述车辆控制信息对相应的传感器、阀、大臂、铲斗、灯或喇叭进行控制。本发明配备多视角摄像头、雷达、以及感应传感器,能够及时警示、并纠正操作员不当操作、或危险行为。
如图1e所示,于一实施例中,本发明的炉下清渣机遥控系统,所述系统包括:远程驾驶舱端、云端和清渣机。云端:云端由通信网络、以及超视距控制系统平台组成。网络依据现场工业环境采用5G\工业WIFI通信网络两种通信方式,以适用于多种工业及网络覆盖环境。超视距控制系统平台是舱端与车端数据交互、处理及管理平台,通过建立车端-舱端的架构流程、控制指令处理流程、及视频处理流程,实现低时延高效率的进行远程接管车辆。在5G网络或者工业wifi覆盖的厂区,在复杂工况条件下实现舱端与车端数据交互,实现不停炉无人清渣和卸载作业。
所述远程驾驶舱端用于将车辆控制指令发送至所述云端。所述远程驾驶舱端包括:操作机构、显示系统、舱端网关设备和输入部件,所述显示系统为曲面屏或矩阵大屏;所述舱端网关设备为网络交换机;所述输入部件为罗技部件,例如罗技模拟方向机、罗技制动、离合器踏板。
所述云端用于转发所述车辆控制指令至所述清渣机;所述云端为舱端服务器。
所述清渣机用于基于所述车辆控制指令进行相应操作,所述清渣机包括车辆VCU、车辆控制单元、摄像装置、雷达装置、车载网关设备、传感器、阀、机臂、铲斗、灯或喇叭。所述摄像装置为车载摄像头。所述清渣机还包括显示装置,所述显示装置用于展示所述音视频信息;所述显示装置为显示屏和喇叭。用于与远程驾驶舱端进行语音或视频通信,从而远程操控位于清渣机的工作人员。本发明实现全线控技术,能够实现整车发动机系统、行走系统、液压工作系统、电控系统等多系统故障诊断、及预警,同时经网络实时反馈操作台、设备智能管理平台,及时告知操作人员、设备业主设备运行、预警、故障、及待保养提醒等信息。改变了遥控炉下清渣机器人操作模式,让操作人员远离操作现场,以及因现场复杂工况、高温、粉尘、高湿带来的职业健康及生产安全问题,提高了操作人员舒适性、以及环境安全。为使用客户的人员、设备安全管理提供了新方案。同时,本发明可实现转炉不停的情况下进场清渣,该设备带来的不停炉清渣工艺可以为钢铁冶炼节省大量停炉清渣时间、以及停炉过程中的热量损失。不仅节约了大量转炉再加热能源,也大大减少了碳排放。
如图2所示,于一实施例中,本发明的炉下清渣机遥控方法,包括以下步骤:步骤S21、基于远程驾驶舱端将车辆控制指令发送至云端;步骤S22、基于所述云端转发所述车辆控制指令至清渣机;步骤S23、基于所述清渣机基于所述车辆控制指令进行相应操作。
具体地,所述基于远程驾驶舱端将车辆控制指令发送至云端包括:所述远程驾驶舱端包括舱端VCU、舱端控制单元和舱端网关设备;所述舱端VCU用于将车辆控制信息发送至舱端控制单元;所述舱端控制单元用于基于所述车辆控制信息生成车辆控制指令并转发至舱端网关设备;所述舱端网关设备用于将所述车辆控制指令发送至所述云端。
具体地,还包括通讯终端,所述通讯终端用于发送音视频信息至云端,以使所述云端转发所述音视频信息至远程驾驶舱端。
具体地,所述远程驾驶舱端用于将音视频信息发送至所述云端,以使所述云端转发所述音视频信息至清渣机。
具体地,所述远程驾驶舱端还包括:操作机构、显示系统和舱端网关设备;所述操作机构包括以下任意一种或多种:座椅、操作手柄、操作面板和脚踏板;所述显示系统包括以下任意一种或多种:显示屏、仪表和指示灯;所述舱端网关设备包括以下任意一种或多种:CAN网关、5G模组、无线AP、交换机和网络适配器。
具体地,所述操作机构用于获取车辆控制信息,所述操作机构用于转发所述车辆控制信息至舱端VCU,所述显示系统用于获取所述清渣机发送的音视频信息进行展示。
具体地,所述清渣机包括:车辆VCU、车辆控制单元、摄像装置、雷达装置、车载网关设备、传感器、阀、机臂、铲斗、灯或喇叭。
具体地,所述车载网关设备用于接收音视频对讲信息和车辆控制指令,转发所述音视频对讲信息和车辆控制指令至所述车辆控制单元;所述车辆控制单元解析所述音视频对讲信息或车辆控制指令以生成车辆控制信息,转发所述车辆控制信息至所述车辆VCU;以使所述车辆VCU基于所述车辆控制信息对相应的传感器、阀、大臂、铲斗、灯或喇叭进行控制。所述音视频对讲信息属于通过通讯终端发送的用于进行对清渣机进行控制的音视频信息。即除了用于普通沟通的音视频信息外,还有用于具体清渣机控制的音视频对讲信息。所述音视频对讲信息可以应用于人工维修清渣机的时候进行音视频沟通。
具体地,所述清渣机还用于发送车辆数据信息、及车端周边环境音视频信息至云端,以使云端转发所述车辆数据信息至所述远程驾驶舱端;所述远程驾驶舱端基于显示系统显示所述车辆数据信息和/或车端周边环境音视频信息。所述车端周边环境音视频信息由摄像装置进行拍摄获取。这样方便远程驾驶舱端实时了解所述清渣机所在的周边环境的情况。
需要说明的是,上述方法的原理与上述炉下清渣机遥控系统中的结构一一对应,故在此不再赘述。
综上所述,本发明炉下清渣机遥控系统及方法,用于远程控制清渣机进行炉下清渣、运渣,在转炉不停炉工艺下实现清渣机的远程操控。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 炉下清渣机遥控系统及方法
- 电能表气动清渣机及清渣方法