强杂波复杂背景高机动弱小目标的跟踪方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及雷达数据处理技术领域,适用于强杂波背景下的高机动目标的实时跟踪。
背景技术
高机动弱小目标的探测是雷达经常面临且亟待解决的关键问题之一,如固定翼无人机、小型多旋翼无人机等航空器。多旋翼无人机飞行高度低、雷达反射面积小、飞行速度慢是典型的“低小慢”目标;在运动过程中由于人为操控或随机干扰等因素,多旋翼无人机又具有速度、高度、航向变化较快的高机动特性。多旋翼无人机价格低廉、易于操控、机动性强,由于缺乏有效管制,导致了“黑飞”事件频发,给公共安全造成了极大的隐患,对此类无人机的监视与管控成为城市安保的难题。对此类高机动小目标的探测与跟踪,雷达仍然是目前探测技术的主流传感器。在干扰强、噪声高的城市复杂背景下,雷达系统对无人机目标的回波信号弱、信噪比低、威力范围小,导致探测效能降低。因此,对此类检测概率较低的高机动弱小目标实时持续稳定跟踪成为雷达跟踪技术领域的难点。
雷达在对高机动目标的跟踪过程中最关键问题在于利用目标测量信息对目标下一时刻运动状态的实时估计,实质则是一类参数估计算法的问题。雷达实现目标的跟踪是利用雷达回波信号获取目标当前时刻的测量信息如:距离、俯仰、方位、速度等,并利用测量信息和数据关联法则最大程度将受到环境噪声影响和非合作目标干扰的虚假信息剔除,得到目标的真实测量值,建立适合目标运动特性的运动模型及滤波系统计算目标的运动特征参数并估计目标运动状态,用航迹关联法则形成目标航迹,最终实现对目标的跟踪。雷达对高机动目标跟踪主要包括目标的运动特性建模和滤波器的设计,目标的运动模型建模是用运动方程的形式来描述目标的运动状态,滤波是采用某种策略对目标状态估计值和状态观测值进行加权处理获取目标状态的滤波值。对目标跟踪性能评估指标主要有跟踪精度、跟踪计算量(实时性)、跟踪稳定性(航迹寿命)等。复杂背景中小目标的检测与跟踪一直是监视和告警系统的重要组成部分,为获取更充裕的预警时间,对高机动小目标的跟踪实时性具有较高的要求,在实际工程实现时主要关注跟踪方法的复杂度及硬件搭载平台的运算效率等问题,在跟踪实时性、稳定性及跟踪精度如何平衡成为工程应用上一个现实问题。在确保跟踪精度的前提下具有极强实时性的跟踪方法成为雷达数据处理面临关键问题之一。
目前用于高机动目标运动模型有:Singer模型、Jerk模型、“当前”统计(CS)模型、交互式多模型(IMM)等。Singer模型算法目标加速度协方差为σ
为提高雷达时间资源利用率,提高目标跟踪实时性,获取更充裕的预警时间,需要一种计算量少,适用性高、稳定性强、持续时间长的目标跟踪方法。
发明内容
为了克服上述问题,本发明的目的是针对高机动小目标特性和现有技术不足之处,提供一种计算速度快,计算量少、雷达时间资源利用率高、跟踪实时性好稳定性强的目标跟踪方法。
本发明所采用的技术方案是:一种强杂波复杂背景高机动小目标的跟踪方法,其特征在于:雷达信号处理单元对接收到的回波和路信号进行三路并行处理,第一路依据雷达波束驻留时间,自适应选择快速傅里叶变换FFT或有限冲激响应滤波器FIR处理方式完成目标信号检测,第二路采用零速滤波器加杂波图的方法进行目标信号检测,第三路采用Kalmus滤波器加杂波图方法进行目标信号检测,三路并行处理完成目标信号检测后,经角度解算形成包含目标距离、方位、俯仰等信息的目标点迹并发送至雷达数据处理单元,航迹处理软件对接收到的目标点迹进行二次加工处理,通过点迹凝聚、剩余杂波图检测、相关处理形成目标航迹;目标航迹成功起始后,航迹数据用滑窗方式进入航迹拟合模块,对滑窗长度为n的目标航迹信息在直角坐标系进行一维二阶拟合;航迹拟合模块根据离散序列号构成矩阵A、目标点迹测量值构成矩阵B和拟合系数构成矩阵β,利用正规方程线性回归原理公式β=(A×A
本发明与现有跟踪方法相比其显著优点是:
跟踪实时性好、稳定性强。本发明雷达信号处理单元对接收到的回波信号采用三路并行处理方式完成目标信号检测,根据雷达波束驻留时间自适应选择FFT或FIR滤波的方法完成信号检测,同时对零多普勒频率附近的目标,通过Kalmus滤波器加杂波图和优化的零速滤波器加杂波图的方法进行检测,实现固定杂波抑制和信号积累。通过杂波抑制增强滤波技术,有效抑制了杂波干扰,达到了增强目标信号的目的,解决了强杂波背景下的低速小目标检测问题,使得目标的搜索跟踪更加准确。本发明采用“当前”(CS)模型的卡尔曼滤波,持续实时解算目标运动参数并估计下一时刻目标运动状态参数,完成滤波器增益系数的迭代更新,实时完成目标航迹更新。自适应地对强杂波复杂背景高机动目标航迹跟踪,实现对高机动小目标的稳定跟综,实验证明,跟踪实时性好、稳定性强。
计算量少、时间资源利用率高。本发明通过对接收到的目标点迹进行二次加工处理,通过点迹凝聚、剩余杂波图检测、相关处理形成目标航迹;目标航迹成功起始后,航迹数据以滑窗方式进入航迹拟合模块,对滑窗长度为n的目标航迹信息在直角坐标系进行一维二阶拟合,利用正规方程线性回归原理的归一化公式,通过一次矩阵运算即可获取目标机动加速度方差。这种利用正规方程线性回归原理的处理方式,大大减少了计算量,节省了雷达系统时间资源,提高了解算目标运动参数的实时性及雷达时间资源利用率,获取了更充裕的预警时间且程序简单易于工程实现,使用性强。
本发明所提供的方法不受雷达体制、雷达数据率限制,适用于多种硬件平台,各种航迹外推滤波器,还可适用于对非机动目标的跟综。
附图说明
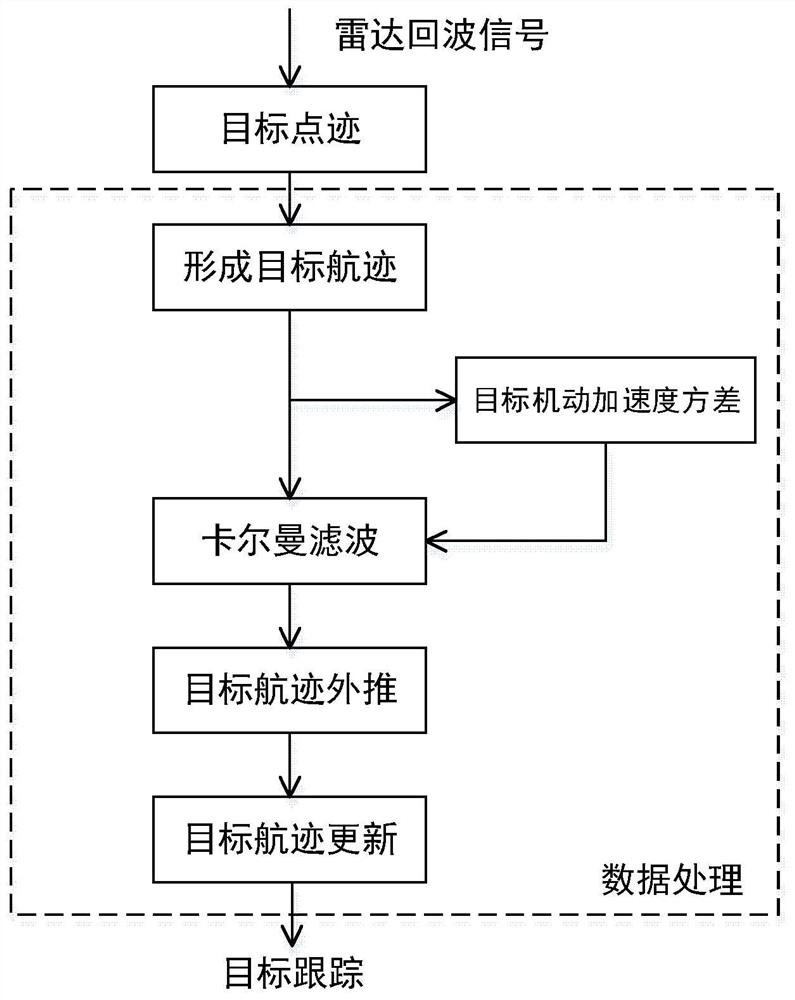
图1是本发明强杂波复杂背景高机动弱小目标流程框图。
下面结合附图对本发明做进一步说明。
具体实施方式
参阅图1。根据本发明,雷达信号处理单元对接收到的回波和路信号进行三路并行处理,第一路依据雷达波束驻留时间,自适应选择快速傅里叶变换FFT或有限冲激响应滤波器FIR处理方式完成目标信号检测,第二路采用零速滤波器加杂波图的方法进行目标信号检测,第三路采用Kalmus滤波器加杂波图方法进行目标信号检测,三路并行处理完成目标信号检测后,经角度解算形成包含目标距离、方位、俯仰等信息的目标点迹并发送至雷达数据处理单元,航迹处理软件对接收到的目标点迹进行二次加工处理,通过点迹凝聚、剩余杂波图检测、相关处理形成目标航迹;目标航迹成功起始后,航迹数据用滑窗方式进入航迹拟合模块,对滑窗长度为n的目标航迹信息在直角坐标系进行一维二阶拟合,航迹拟合模块根据离散序列号构成矩阵A、目标点迹测量值构成矩阵B和拟合系数构成矩阵β,利用正规方程线性回归原理公式β=(A×A
航迹拟合模块根据离散序列号构成的矩阵A、目标点迹测量值构成的矩阵B和拟合系数构成的矩阵β,利用归一化公式β=(A×A
其中,所述离散序列号构成的矩阵A为:
其中,n为滑窗长度。
所述目标点迹测量值构成的矩阵B为:
其中,y为目标点迹测量值。
所述拟合系数构成的矩阵β为:
其中,a为二阶拟合系数、b为一阶拟合系数、c为拟合常数。
雷达数据处理单元中的航迹滤波模块采用“当前”统计(CS)模型的卡尔曼滤波算法,利用接收到的目标机动加速度方差2a及当前周期的目标航迹信息持续实时解算目标运动参数并估计下一时刻目标运动状态参数,完成滤波器增益系数的迭代更新,实现航迹滤波平滑外推。
航迹拟合模块针对城市强杂波背景下多旋翼无人机,选择滑窗长度n=5或n=8,实时对目标的滤波跟踪,最终实现目标实时稳定跟踪。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。之内。
- 强杂波复杂背景高机动弱小目标的跟踪方法
- 一种强杂波环境下对弱小目标和高机动目标探测跟踪的数据处理方法