一种基于矩形阵列的天线测向和极化参数联合估计方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及阵列信号处理技术领域,尤其是涉及一种基于矩形阵列的天线测向和极化参数联合估计方法。
背景技术
阵列信号处理作为现代信号处理领域的重要研究分支之一,其原理是将传感器组按照一定准则进行空间配置,利用空域和时域特征来增强有用信号,获取其特征信息,并抑制干扰、杂波以及噪声,已经广泛的应用到雷达、电子对抗、声呐地震学等领域。
传统的基于阵列信号波达方向(Direction of arrival,DOA)估计的方法中,需要进行高维的谱峰搜索来获得信号的DOA和极化参数联合估计,搜索过程格外复杂,不适合实际应用。
发明内容
为解决上述问题,本发明的目的是提供一种基于矩形阵列的天线测向和极化参数联合估计方法,其避免了运算量繁杂的多维谱峰搜索操作,同时扩展了有效地阵列孔径,提高了测角精度。
为实现上述发明目的,本发明采用如下技术方案:
一种基于矩形阵列的天线测向和极化参数联合估计方法,其包括以下步骤:
S1、矩形阵列天线数学建模
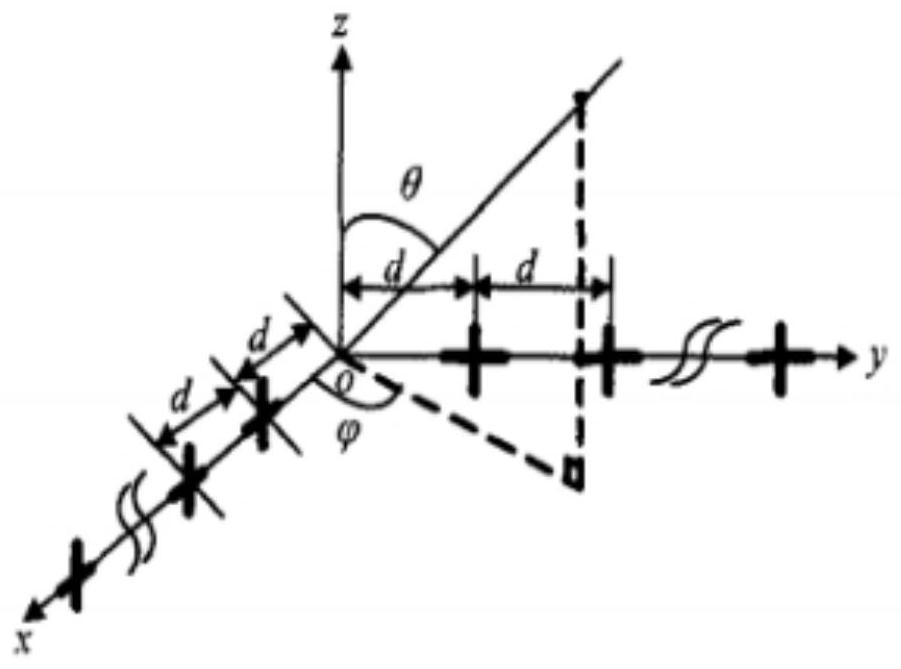
建立矩形阵列天线数学模型,设定由M个平行于x轴、M个平行于y轴和2M个平行于z轴的电偶极子组成均匀矩形阵列;其中,相邻两个电偶极子对沿x轴和y轴方向的阵元间距d均远大于入射信号的波长的一半;
入射信号为K个完全极化的远场窄带电磁波信号,波长为λ,第k个入射信号的方位角和俯仰角分别为
第k个入射信号在x轴方向的极化域导向矢量表示为:
第k个入射信号在y轴方向的极化域导向矢量表示为:
第k个入射信号在x轴方向的方向域导向矢量表示为:
第k个入射信号在y轴方向的方向域导向矢量表示为:
式中,
在t时刻,矩形阵列接收数据矢量表示为
式中,
考虑快拍数多的情况下,矩形阵列接收数据表示为:
X=AS+N
式中,X=[x(1),x(2)...,x(L)],S=[s(1),s(2)...,s(L)],N=[n(1),n(2)...,n(L)],L为快拍数;
S2、入射信号DOA和极化参数估计
针对矩形阵列接收数据X,其协方差矩阵为
R
=AR
式中,S(n)表示入射信号,U(n)表示噪声信号,σ表示噪声功率,I表示单位矩阵,R
对矩阵R
E
=[C
式中,Δ
阵列流形矩阵A的估计值为:
对阵列流形矩阵A的估计值进行分割得到:
式中,
利用
利用
因此,能够得到入射信号的方位角、俯仰角、极化辅助角和极化相位差的估计结果分别为
进一步地,上述的步骤S1中,俯仰角的取值范围为θ∈[0,π/2),方位角的取值范围为
进一步地,上述的步骤S1中,极化辅助角的取值范围为γ∈[0,π/2),极化相位差的取值范围为η∈[-π,π)。
由于采用如上所述的技术方案,本发明具有如下优越性:
该基于矩形阵列的天线测向和极化参数联合估计方法,其所需要的每个天线单元都是双极化,具备两个接收通道,两个正交双天线单元连接一个射频通道完成接收,通过处理,能够快速确定阵列接收信号源的数量,并准确的测量出信号的极化参数和角度参数,这两维参数有助于高正确率的识别辐射源。
附图说明
图1是本发明中的矩形阵列示意图;
图2是本发明的估计方法实验验证结果中校正前到达角估计值与真实值关系图;
图3是本发明的估计方法实验验证结果中校正后到达角估计值与真实值关系图;
图4是本发明的估计方法实验验证结果中极化估计值与真实值关系图;
图5是本发明的估计方法实验验证结果中入射信号空间到达角估计值的彼岸标准准偏差与信噪比的关系图;
图6是本发明的估计方法实验验证结果中入射信号空间极化角估计值的标准偏差与信噪比的关系图。
具体实施方式
下面结合附图和实施例对本发明的技术方案作进一步详细说明。
一种基于矩形阵列的天线测向和极化参数联合估计方法,其包括以下步骤:
S1、矩形阵列天线数学建模
建立矩形阵列天线数学模型,设定由M个平行于x轴、M个平行于y轴和2M个平行于z轴的电偶极子组成均匀矩形阵列,如图1所示;其中,相邻两个电偶极子对沿x轴和y轴方向的阵元间距d均远大于入射信号的波长的一半,且小于10倍的波长;
入射信号为K个完全极化的远场窄带电磁波信号,波长为λ,第k个入射信号的方位角和俯仰角分别为
由于上述矩形阵列中每个阵元均由正交偶极子对构成,那么第k个入射信号在x轴和y轴方向的极化域导向矢量可以分别表示为:
根据该阵列的结构,第k个入射信号在x轴和y轴方向的方向域导向矢量分别表示为:
式中,
在t时刻,矩形阵列接收数据矢量表示为
式中,
s(t)=[s
n(t)为高斯白噪声;
考虑快拍数多的情况下,矩形阵列接收数据表示为:
X=AS+N
式中,X=[x(1),x(2)...,x(L)],S=[s(1),s(2)...,s(L)],N=[n(1),n(2)...,n(L)],L为快拍数;
S2、入射信号DOA和极化参数估计
由于各阵元的噪声互不相关,也不和入射信号相关,针对矩形阵列接收数据X,其协方差矩阵为
R
=AR
式中,S(n)表示入射信号,U(n)表示噪声信号,σ表示噪声功率,I表示单位矩阵,R
对矩阵R
E
=[C
式中,Δ
由矩阵的运算可得,阵列流形矩阵A的估计值为:
对阵列流形矩阵A的估计值进行分割得到:
式中,
利用
利用
因此,根据以上两式,能够得到入射信号的方位角、俯仰角、极化辅助角和极化相位差的估计结果分别为
利用Matlab试验平台对本发明基于矩形阵列的天线测向和极化参数联合估计方法进行数学仿真实验验证。
两个入射信号的参数分别为(30.93,37.09,45,90)和(50.08,40,45,-90),信噪比固定为10dB,快拍数固定为800,入射信号的DOA和极化参数估计仿真结果如图2~图4所示。
两个入射信号的参数分别为(30.93,37.09,45,90)和(50.08,40,45,-90),快拍数固定为800,信噪比的取值范围为(-10,40),入射信号DOA估计标准随信噪比变化仿真结果如图5~图6所示。
从仿真结果能够看出,本发明基于矩形阵列的天线测向和极化参数联合估计方法能够快速确定阵列接收信号源的数量,并准确的测量出信号的极化参数和角度参数,这两维参数有助于高正确率的识别辐射源。
以上所述仅为本发明的较佳实施例,而非对本发明的限制,在不脱离本发明的精神和范围的情况下,凡依本发明申请专利范围所作的均等变化与修饰,皆应属本发明的专利保护范围之内。
- 一种基于矩形阵列的天线测向和极化参数联合估计方法
- 基于重采样的COLD阵列波达方向和极化参数联合估计方法