一种自动分拣清运垃圾桶
文献发布时间:2023-06-19 12:22:51
技术领域
本发明属于垃圾处理领域,特别涉及一种自动分拣清运垃圾桶。
背景技术
在大型广场、机场、高铁站等大型公共场所,垃圾桶的分布较为分散,这需要清洁人员逐一对垃圾桶进行清洁打扫,导致清洁人员的工作强度较大;同时,垃圾在收集过程中很容易由于接触而造成二次污染,加大了清洁人员的分类难度,并且随着垃圾分类要求的提高,许多居民在处理生活垃圾时总会面临不知归为何类的问题。
中国专利申请CN207390129U公开了一种垃圾分选机器人,包括外壳、设置在外壳上的图像采集装置、位于所述外壳内部的垃圾收集箱以及设置在所述垃圾收集箱上方的分选机构,利用图像采集装置、分选转盘以及电机,能够实现垃圾分选,但是具有只能分选两类垃圾,且无法进行垃圾清运的缺点。中国专利申请CN108792362A公开了一种智能化的垃圾分类装置及控制系统,包括投放装置和分拣装置,投放装置是包含垃圾投放口,投放装置内有一压缩装置,压缩装置顶端有一图像识别装置,分拣装置包含底盘、垃圾分拣箱和运行轨道和垃圾推送装置,利用图像识别装置和环形轨道实现对垃圾的分类,但是具有无法自动清运垃圾,消耗人力资源的缺点。
发明内容
为了克服上述现有技术的不足,本发明的目的在于提供一种自动分拣清运垃圾桶,通过运用视觉识别模块,确定待分拣垃圾的类型,基于待分拣的垃圾生成控制信号,根据控制信号控制电机进行偏转,将待分拣的垃圾倾倒入相应的桶体内,控制模块和超声波感应模块的配置是桶体能够自动运输垃圾。本发明能够对垃圾的类别进行自动识别和分类,并且能够定时对垃圾进行清运,具有可以减少人工分拣和清运难度的特点。
为了实现上述目的,本发明采取的技术方案为:
一种自动分拣清运垃圾桶,包括一个以上的桶体20,桶体20组成为一个空心圆柱体,桶体20的下端配置有桶底19,桶底19与底盘13相连接,底盘13为两层隔板组成,底盘13夹层中通过轮轴分别连接有车轮12,底盘13夹层内配置有第三电机22,第三电机22通过第三输出轴23与轮轴相连接,底盘13上层隔板上部一侧配置有电源模块14,底盘13上层隔板上部配置有电池槽16,电池槽16靠近底盘13边缘的一侧配置有超声波感应模块17,电池槽16另一侧配置有控制模块15。
所述的桶体20的空心圆柱体的开口上方配置有分拣平台2,分拣平台2正上方配置有视觉识别模块1,视觉识别模块1底部配置有摄像头21。
所述的桶体20桶顶与第一支撑杆3的一端相连接,第一支撑杆3的另一端配置有视觉识别模块1,视觉识别模块1底部配置有摄像头21;第二支撑杆10的一端固定在桶底19上表面,第二支撑杆10穿过桶体20的中空部位,第二支撑杆10的另一端配置有支撑槽9,第二电机5通过第二输出轴8与支撑槽9相连接,第二电机5外壳上配置有第一支架7,第一电机4通过第一输出轴6与第一支架7齿轮啮合,第一电机4外壳上设置有第二支架11,第二支架11与分拣平台2相连接。
控制模块15的信号输入端与视觉识别模块1的信号输出端相连接,控制模块15的信号输出端与第一电机4的信号输入端相连接,控制模块15的信号输出端与第二电机5的信号输入端相连接,控制模块15的信号输出端与第三电机22的信号输入端相连接,控制模块15的信号输入端与超声波感应模块17的信号输入端相连接。
所述的第一电机4通过第一输出轴6带动其进行自身向上或向下旋转45°,此时第二电机5保持固定;第二电机5通过第二输出轴8带动其进行自身在yz平面内顺时针和逆时针旋转45°,此时第一电机4保持固定,从而使分拣平台2能够向不同位置的桶体20进行偏转,将待分拣垃圾倾倒入相应的垃圾储存箱内。
所述的控制模块15为STM32单片机。
所述的电源模块14一端通过导线分别与视觉识别模块1、第一电机4、第二电机5、第三电机22、控制模块15、超声波感应模块17相连接,电源模块14另一端接入外接电源,从而提供电源;所述的电池槽16通过导线分别与视觉识别模块1、第一电机4、第二电机5、第三电机22、控制模块15、超声波感应模块17相连接,从而提供电源。
本发明的有益效果为:
一种自动分拣清运垃圾桶,由于视觉识别模块1底部安装有摄像头21,能够将放置在分拣平台2上的垃圾识别后分类;由于第二电机5通过第二输出轴8与支撑槽9相连接,第二电机5外壳上配置有第一支架7,第一电机4通过第一输出轴6与第一支架7齿轮啮合,第一电机4外壳上设置有第二支架11,第二支架11与分拣平台2相连接,且第一电机4可以基于第一输出轴6带动其进行自身向上或向下旋转45°;第二电机5可以在yz平面内通过第二输出轴8带动其进行自身顺时针和逆时针旋转45°,从而使分拣平台2能够向不同位置的桶体20进行偏转,将待分拣垃圾倾倒入相应的垃圾储存箱内;由于底盘13夹层中通过轮轴分别连接有车轮12,底盘13夹层内配置有第三电机22,第三电机22通过第三输出轴23分别与车轮12的轮轴相连接,电池槽16靠近底盘13边缘的一侧配置有超声波感应模块17,电池槽16另一侧配置有控制模块15,当箱体20内的垃圾满了之后,第三电机22能够驱动车轮12进行垃圾运输,当超声波感应模块17感应到前方有障碍物之后,将信号传递至控制模块15,再控制车轮12形成转速差,实现转弯绕过障碍物,最终实现垃圾的清运。
综上所述,本发明能够实现自动分拣以及运输垃圾,具有使用方便,节约人力物力的特点。
附图说明
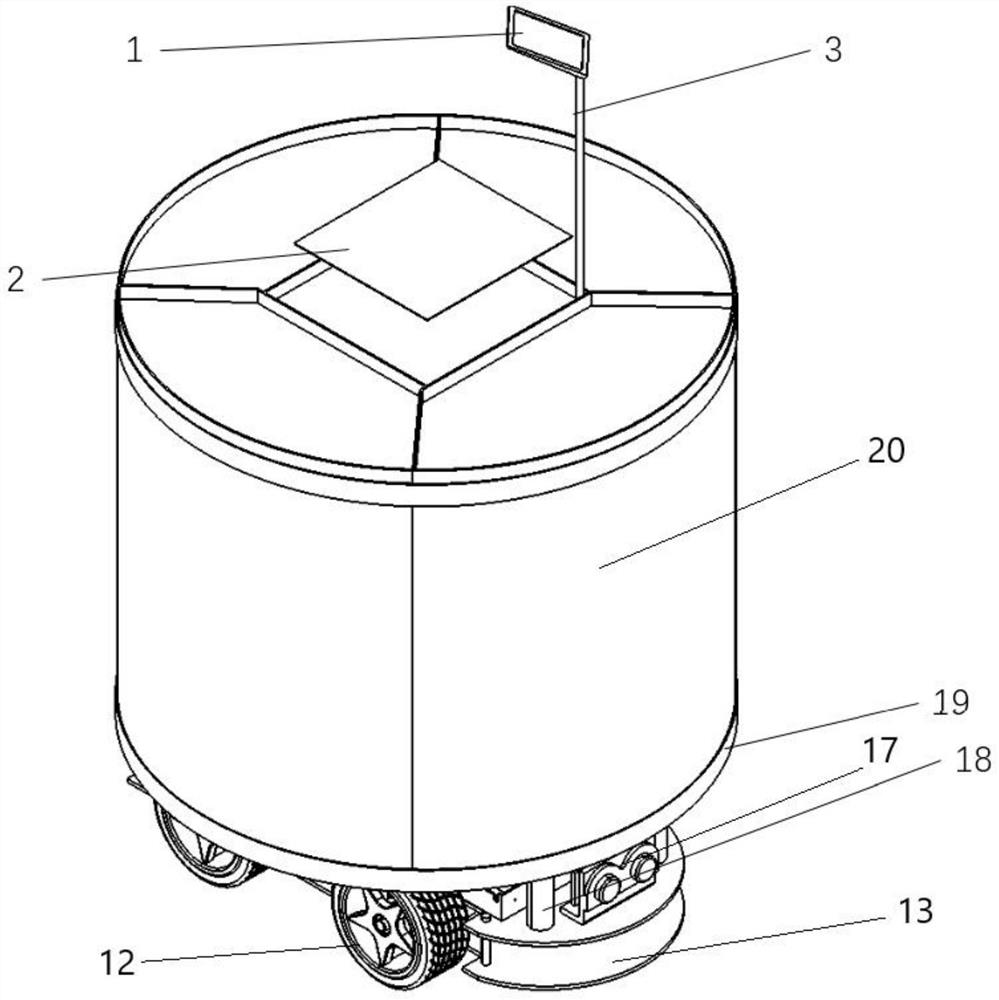
图1是本发明的结构示意图。
图2(a)是本发明中第一电机4、第二电机5、第一输出轴6和第一支架7的局部放大图;(b)是本发明中第二输出轴8、支撑槽9和第二支撑杆10的局部放大图。
图3是本发明中分拣平台2、第一电机4、第二电机5和第二支架11的局部放大图。
图4是本发明中车轮12、底盘13、电源模块14、控制模块15、电池槽16和超声波感应模块17的局部放大图。
图5是本发明的侧视图。
图6是本发明的正视图。
图7是本发明的识别分拣流程图。
图8是本发明的电路框图。
具体实施方式
以下结合附图对本发明作进一步地说明。
参照图1、图4、图5和图6,一种自动分拣清运垃圾桶,包括一个以上的桶体20,桶体20组成为一个空心圆柱体,桶体20的下端配置有桶底19,桶底19下部与第三支撑杆18的一端相连接,第三支撑杆18的另一端与底盘13相连接,底盘13为两层隔板组成,底盘13夹层中通过轮轴分别连接有车轮12,底盘13夹层内配置有第三电机22,第三电机22通过第三输出轴23分别与车轮12的轮轴相连接,底盘13上层隔板上部一侧配置有电源模块14,底盘13上层隔板上部配置有电池槽16,电池槽16靠近底盘13边缘的一侧配置有超声波感应模块17,电池槽16另一侧配置有控制模块15。
参照图1-图8,所述的桶体20桶顶与第一支撑杆3的一端相连接,第一支撑杆3的另一端配置有视觉识别模块1,视觉识别模块1底部配置有摄像头21;第二支撑杆10的一端固定在桶底19上表面,第二支撑杆10穿过桶体20的中空部位,第二支撑杆10的另一端配置有支撑槽9,第二电机5通过第二输出轴8与支撑槽9相连接,第二电机5外壳上配置有第一支架7,第一电机4通过第一输出轴6与第一支架7齿轮啮合,第一电机4外壳上设置有第二支架11,第二支架11与分拣平台2相连接。
参见图8,控制模块15的信号输入端与视觉识别模块1的信号输出端相连接,控制模块15的信号输出端与第一电机4的信号输入端相连接,控制模块15的信号输出端与第二电机5的信号输入端相连接,控制模块15的信号输出端与第三电机22的信号输入端相连接,控制模块15的信号输入端与超声波感应模块17的信号输入端相连接。
参照图1-图3,所述的第一电机4可以通过第一输出轴6带动其进行自身向上或向下旋转45°,此时第二电机5保持固定;第二电机5可以通过第二输出轴8带动其进行自身在yz平面内顺时针和逆时针旋转45°,此时第一电机4保持固定,从而使分拣平台2能够向不同位置的桶体20进行偏转,将待分拣垃圾倾倒入相应的垃圾储存箱内。
参照图4,所述的电源模块14一端通过导线分别与视觉识别模块1、第一电机4、第二电机5、第三电机22、控制模块15、超声波感应模块17相连接,电源模块14另一端接入外接电源,从而提供电源;所述的电池槽16通过导线分别与视觉识别模块1、第一电机4、第二电机5、第三电机22、控制模块15、超声波感应模块17相连接,从而提供电源。
参照图8,所述的第一电机4、第二电机5和第三电机22通过控制模块15由L298D电源驱动。
本发明的工作原理为:
使用时,将电源模块14接入外接电源,或者在电池槽16中放入电池,从而开启装置,再将垃圾放置在分拣平台2上,视觉识别模块1底部安装的摄像头21将垃圾的外观、颜色等信息输送到控制模块15,此时,控制模块15发出拍照指令,摄像头21对垃圾进行拍照,完成图像采集过程;控制模块15中嵌入已经训练好的垃圾分类模型,该模型是在网络模型的基础上训练垃圾图像得到的,摄像头21拍摄的照片传输到控制模块15中并对照片进行图像处理、种类识别,然后控制模块15输出分类信号;控制模块15输出的指令控制第一电机4和第二电机5进行自身偏转45°,当第一电机4进行偏转时,第二电机5保持固定,同理,第二电机5偏转时,第一电机4保持固定,从而使垃圾进入相应的桶体20中;当桶体20内的垃圾装满后,则开启垃圾清运过程,当超声波感应模块17感应到障碍物时,控制模块15将所得的超声波信号和测距信息分析处理后将对应的PWM波传送至第三电机22,若车轮12转速相同,则前进,反之转速不相同时,通过转速差来实现转弯绕过障碍物,最终实现垃圾的清运。
- 一种自动分拣清运垃圾桶
- 一种双动力自动分拣垃圾清运装置