一种用于术后局部康复训练装置
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及术后康复训练装置技术领域,具体是涉及一种用于术后局部康复训练装置。
背景技术
目前,现今随着我国社会老龄化趋势的增长,受身体活动障碍困扰的人数与日俱增,尤其是患有下肢活动障碍或是偏瘫的病患,治疗早期需长期卧床,为了达到早日恢复下肢活动能力的效果,下肢的局部康复训练是必不可少的关键环节。
目前,市场上缺少专门针对居家老人的健身机器人,老人常常只能通过户外的健身器材、室内动感单车等进行手臂和腿部的肌肉锻炼,形式十分单一,虽然,现在市面出现了多种多样的下肢康复训练仪器,下肢康复训练器作为一种自动化的康复医疗设备,在减轻医生工作强度的同时,为患者各个阶段的康复提供了极大的便利,但是,大多数的下肢康复训练器结构复杂,价格昂贵,老人在使用时难以了解健身器材的具体用途,操作不合理、不规范,导致老人在锻炼过程中的安全难以得到保障,而且,面对不同肢体长度的老人来说,产品的通用性较差。
发明内容
针对背景技术中提到的问题,本发明的目的是提供一种用于术后局部康复训练装置,以解决背景技术中提到的问题。
本发明的上述技术目的是通过以下技术方案得以实现的:
本发明提供一种用于术后局部康复训练装置,包括:
升降座椅,用以承载术后病人;
下肢局部训练机构,用以使升降座椅上承载的术后病人作下肢局部康复训练;
平移机构,用以调节升降座椅与下肢局部训练机构之间的距离;
其中,所述平移机构包括:
矩形底座,其顶部为开口状;
平移板,能够沿着矩形底座的长度方向移动的设置在矩形底座的开口处;
升降座椅包括:
自动升降管,设置在平移板的顶部中间处;
座椅,能够升降的设置在自动升降管的工作端。
通过采用上述技术方案,根据术后病人的肢体长度,事先先控制平移板带动座椅沿着矩形底座移动到靠近固定箱的合适位置,再控制自动升降管带动座椅进行升降调节,将座椅自动调节到合适位置,随后术后病人坐在座椅上,术后病人的脚部分别踩在下肢局部训练机构上,通过下肢局部训练机构继而使术后病人下肢进行康复运动。
较佳的,下肢局部训练机构包括:
底座,水平设置在矩形底座的一端;
固定箱,设置在底座的顶部;
第一转轴,横向且能够转动的设置在固定箱的内部,第一转轴的两端分别能够转动的穿过固定箱的两侧向外延伸;
脚踏板,具有一对,呈交叉设置在第一转轴的两个延伸端,且每个脚踏板的后侧均设有弧形缓冲套;
固定箱靠近座椅的垂直面上设有能够升降调节的控制主机,控制主机分别与升降座椅、下肢局部训练机构和平移机构电性连接。
通过采用上述技术方案,根据术后病人的肢体长度,事先通过控制主机控制平移板带动座椅沿着矩形底座移动到靠近固定箱的合适位置,控制主机控制自动升降管带动座椅进行升降调节,将座椅自动调节到合适位置,随后术后病人坐在座椅上,术后病人的脚部分别踩在脚踏板上,术后病人分别踩动每个脚踏板,继而使术后病人下肢进行康复运动,并且控制主机可控制下肢局部训练机构上的飞轮自动旋转,带动两个脚踏板旋转,通过两个自动旋转的脚踏板带动病人的下肢作自动的康复运动,在术后病人下肢分别踩在脚踏板上时,设置的每个弧形缓冲套套在下肢的小腿部作保护作用。
较佳的,所述平移机构还包括:
第一限位光杆,具有一对,沿着矩形底座的长度方向平行设置的矩形底座的两侧,平移板的底部设有能够在每个第一限位光杆上滑动的限位套;
行走滚轮,具有四个,呈矩形分别在平移板的底部,矩形底座的内部下端的两侧分别设有供每个行走滚轮行走的轨道。
通过采用上述技术方案,通过平移板底部设置的每个行走滚轮分别沿着对应的轨道行走,使平移板能够更加快速的带动座椅进行水平调节,提升座椅与脚踏板之间调节的效率。
较佳的,平移机构还包括:
第一齿条,沿着矩形底座的长度方向设置在两个第一限位光杆之间,第一齿条与两个第一限位光杆平行设置;
第一电机,设置在平移板的顶部,其输出端能够转动的穿过平移板的两面向下延伸;
第一齿轮,传动设置在第一电机的输出端,第一齿轮与第一齿条啮合设置,控制主机与第一电机电性连接。
通过采用上述技术方案,当需要调节座椅与脚踏板的距离时,控制主机控制第一电机驱动第一齿轮沿着第一齿条移动,继而带动平移板沿着矩形底座的长度方向平移,在平移板进行移动时,通过平移板底部设置的每个限位套分别沿着对应的第一限位光杆限位移动,通过设置的每个行走滚轮分别沿着对应的轨道行走,使平移板能够更加快速的带动座椅进行水平调节。
较佳的,自动升降管包括:
固定套管,竖直设置在平移板的顶部中间处;
升降内管,能够升降的插设于固定套管的内部,其顶端穿过固定套管的顶部敞开端与座椅的底部相连接;
第二齿条,沿着升降内管的长度方向设置在升降内管的径向面上,固定套管上设有避让第二齿条升降的竖向穿口;
第二齿轮,竖直位于第二齿条的一侧,其与第二齿条啮合设置;
固定套环,固定套设于固定套管的上端外圈,固定套管靠近第二齿条的一侧设有向第二齿轮一侧延伸的延伸板,延伸板的远离第二齿轮的一侧设置有第二电机,第二电机的输出端与第二齿轮的中心处传动连接。
通过采用上述技术方案,当需要调节座椅时,每个控制主机控制第二电机,通过第二电机驱动第二齿轮沿着第二齿条移动,继而带动升降内管沿着固定套管进行升降,同时通过升降内管的端部带动座椅进行升降,直至将座椅升降到合适位置停止,随后术后病人坐在座椅上,并将脚分别踩在脚踏板上;通过第二齿轮与第二齿条的配合,使升降套管更加快速的带动座椅进行升降,提升座椅的调节速度。
较佳的,下肢局部训练机构还包括:
第一竖直支架,设置在固定箱的内部靠近座椅的一端,其顶部设置有水平设置的第一轴套,第一转轴的中端转动设置在第一轴套的内圈;
L型杆,具有一对,反向设置在第一转轴的两端,每个L型杆远离第一转轴的一端分别与脚踏板固定连接。
通过采用上述技术方案,当需要通过术后病人的脚部自行踩动每个脚踏板时,通过第一竖直支架、第一轴套以及一对L型杆形成了供术后病人采用手动模式进行康复的机械结构,术后病人的脚部分别踩动每个脚踏板进行康复运动。
较佳的,每个脚踏板的后侧均设有与脚踏板呈九十度分布的固定板,弧形缓冲套位于固定板靠近脚踏板的一侧,弧形缓冲套的内部粘设有橡胶面。
通过采用上述技术方案,在术后病人的脚部分别踩在每个脚踏板上后,病人的下肢小腿分别抵接在对应的弧形缓冲套内,并与对应的橡胶面接触,通过橡胶面作保护作用,防止刮伤术后病人的下肢腿部,
较佳的,弧形缓冲套靠近固定板的一侧设有四个呈矩形分布的缓冲柱,每个缓冲柱分别穿过固定板向外延伸,每个缓冲柱上均套设有缓冲弹簧,每个缓冲弹簧的两端分别与弧形缓冲套和固定板的内侧相抵接,每个缓冲柱的延伸端均设有能够与固定板远离弧形缓冲套的一侧抵接的抵接柱。
通过采用上述技术方案,在术后病人通过脚分别踩动脚踏板时,设置的每个缓冲柱、缓冲弹簧以及抵接柱作缓冲作用,通过弧形缓冲套上设置的每个缓冲柱、缓冲弹簧以及抵接柱作缓冲作用,在支撑术后病人的下肢同时作保护作用。
较佳的,下肢局部训练机构还包括:
竖直板,竖直设置在固定箱靠近座椅的垂直面上,其两端分别设置有延伸座;
螺杆,螺杆竖直位于两个延伸座之间的中间位置,螺杆的两端分别与对应的延伸座轴接;
第二限位光杆,具有一对,对称设置在螺杆的两侧,每个第二限位光杆分别与螺杆平行,每个第二限位光杆的两端分别与每个延伸座的内侧连接;
移动块,两个延伸座之间,移动块的中部设有供螺杆螺纹连接的螺纹穿孔,移动块的两侧分别设有供每个第二限位光杆穿行的限位穿孔;
把手,位于竖直板的正上方,把手的底部中间处设有与螺杆一端传动连接的转杆;
升降L型板,竖直设置在移动块的垂直面上,控制主机设置在升降L型板的上端位置。
通过采用上述技术方案,根据术后病人的身高,可事先调节控制主机的位置,调节时,手动转动把手,带动转杆与螺杆旋转,螺杆驱动移动块沿着螺杆移动,通过设置的每个第二限位光杆作限位移动,通过移动块带动升降L型板作升降调节,直至将控制主机调节到合适位置停止,通过人工事先转动把手带动螺杆、移动块和控制主机升降,可将控制主机移动至合适的高度,便于术后病人观察控制主机上的显示单元。
较佳的,升降L型板的下端设置有平板支架。
通过采用上述技术方案,通过升降L型板上的平板支架能够将平板或者手机放置于平板支架上,通过平板支架能够将平板或者手机进行架设,使术后病人在做康复训练时可通过手机或者平板观看手机或者平板上的节目,转移术后病人的注意力,使病人轻松康复训练。
综上所述,本发明主要具有以下有益效果:
通过平移板底部设置的每个行走滚轮分别沿着对应的轨道行走,使平移板能够更加快速的带动座椅进行水平调节,提升座椅与脚踏板之间调节的效率;通过第二齿轮与第二齿条的配合,使升降套管更加快速的带动座椅进行升降,提升座椅的调节速度;通过弧形缓冲套上设置的每个缓冲柱、缓冲弹簧以及抵接柱作缓冲作用,在支撑术后病人的下肢同时作保护作用;通过测速传感器将检测数值发送给控制主机,方便术后病人得知训练的次数;通过第三齿轮与第四齿轮分离与啮合的方式,可选择性的控制脚踏板自动与被动的作康复训练,提高实用性;通过人工事先转动把手带动螺杆、移动块和控制主机升降,可将控制主机移动至合适的高度,便于术后病人观察控制主机上的显示单元;通过平板支架能够将平板或者手机进行架设,使术后病人在做康复训练时可通过手机或者平板观看手机或者平板上的节目,转移术后病人的注意力,使病人轻松康复训练。
附图说明
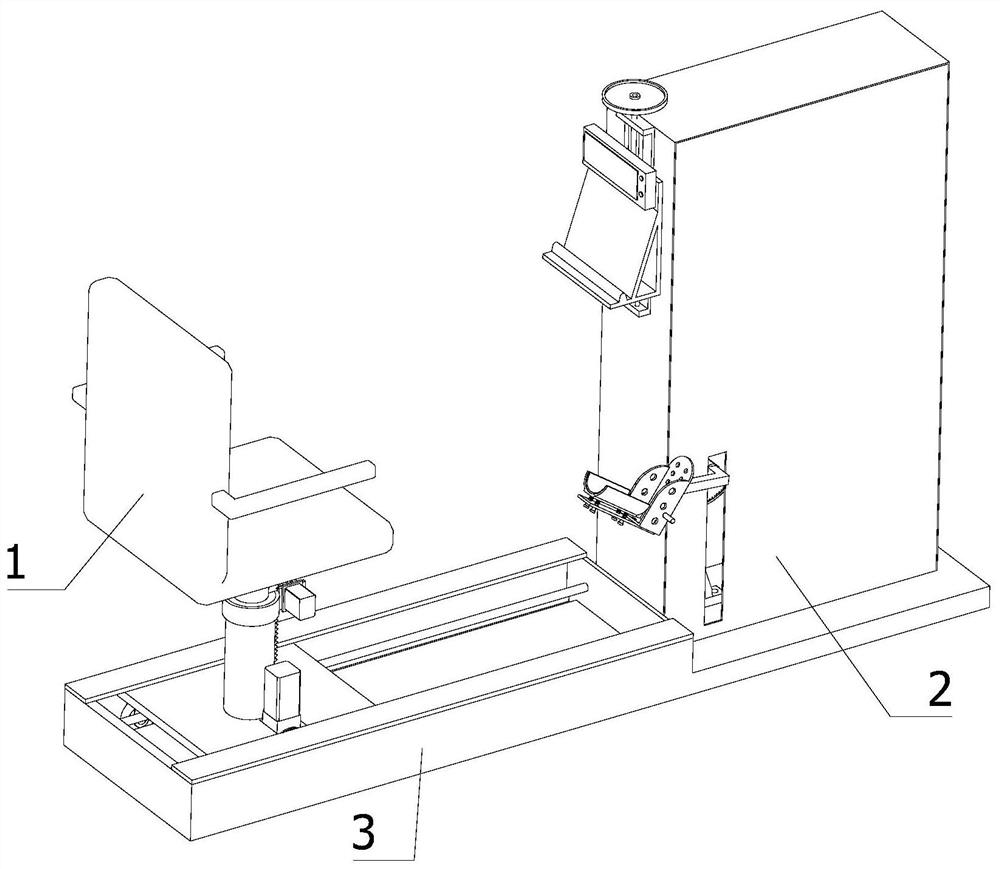
图1为本发明用于术后局部康复训练装置的立体结构示意图一;
图2为本发明用于术后局部康复训练装置的立体结构示意图二;
图3为本发明用于术后局部康复训练装置的俯视图;
图4为图3中沿A-A处的剖视图;
图5为本发明用于术后局部康复训练装置的侧视图;
图6为图5中沿B-B处的剖视图;
图7为本发明用于术后局部康复训练装置的局部立体图;
图8为本发明用于术后局部康复训练装置中平移机构的局部立体图;
图9为本发明用于术后局部康复训练装置中升降座椅的局部立体图;
图10为本发明用于术后局部康复训练装置中下肢局部训练机构的局部立体图一;
图11为图10中C处放大图;
图12为本发明用于术后局部康复训练装置中下肢局部训练机构的局部立体图二;
图13为本发明用于术后局部康复训练装置中下肢局部训练机构的局部分解图。
附图标记:1、升降座椅;2、下肢局部训练机构;3、平移机构;4、矩形底座;5、平移板;6、座椅;7、底座;8、固定箱;9、第一转轴;10、脚踏板;11、弧形缓冲套;12、第一限位光杆;13、限位套;14、行走滚轮;15、轨道;16、第一齿条;17、第一电机;18、第一齿轮;19、固定套管;20、升降内管;21、第二齿条;22、第二齿轮;23、固定套环;24、第一竖直支架;25、第一轴套;26、L型杆;27、固定板;28、橡胶面;29、缓冲柱;30、缓冲弹簧;31、抵接柱;32、第二竖直支架;33、第二轴套;34、第二转轴;35、主动轮;36、从动轮;37、测速传感器;38、直线电动滑台;39、升降竖板;40、第三电机;41、第三齿轮;42、第四齿轮;43、竖直板;44、螺杆;45、第二限位光杆;46、移动块;47、把手;48、升降L型板;49、平板支架;50、第二电机;51、控制主机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图3,该用于术后局部康复训练装置包括:
用以承载术后病人的升降座椅1、用以使升降座椅1上承载的术后病人作下肢局部康复训练的下肢局部训练机构2、用以调节升降座椅1与下肢局部训练机构2之间的距离的平移机构3。
其中,平移机构3包括:
矩形底座4,其顶部为开口状;
平移板5,能够沿着矩形底座4的长度方向移动的设置在矩形底座4的开口处。
升降座椅1包括:
自动升降管,设置在平移板5的顶部中间处;
座椅6,能够升降的设置在自动升降管的工作端。
根据术后病人的肢体长度,事先先控制平移板5带动座椅6沿着矩形底座4移动到靠近固定箱8的合适位置,再控制自动升降管带动座椅6进行升降调节,将座椅6自动调节到合适位置,随后术后病人坐在座椅6上,术后病人的脚部分别踩在下肢局部训练机构2上,通过下肢局部训练机构2继而使术后病人下肢进行康复运动,并且在该用于术后局部康复训练装置中可控制下肢局部训练机构2带动病人的下肢作自动的康复运动,即该用于术后局部康复训练装置具有手动模式和自动模式两种可选择的模式,根据术后病人的具体需求,可以选择对应的模式,以更好地进行下肢康复。
更具体的,请参阅图2、图5至图7,下肢局部训练机构2包括:
底座7,水平设置在矩形底座4的一端;
固定箱8,设置在底座7的顶部;
第一转轴9,横向且能够转动的设置在固定箱8的内部,第一转轴9的两端分别能够转动的穿过固定箱8的两侧向外延伸;
脚踏板10,具有一对,呈交叉设置在第一转轴9的两个延伸端,每个脚踏板10的后侧均设有弧形缓冲套11;
固定箱8靠近座椅6的垂直面上设有能够升降调节的控制主机51,控制主机51分别与升降座椅1、下肢局部训练机构2和平移机构3电性连接。在本实施例中,控制主机51上设有显示单元,控制主机51可将数据显示在显示单元上供术后病人进行观察。
结合之前所述内容,该用于术后局部康复训练装置根据术后病人的肢体长度,事先通过控制主机51控制平移板5带动座椅6沿着矩形底座4移动到靠近固定箱8的合适位置,控制主机51控制自动升降管带动座椅6进行升降调节,将座椅6自动调节到合适位置,随后术后病人坐在座椅6上,术后病人的脚部分别踩在脚踏板10上,术后病人分别踩动每个脚踏板10,继而使术后病人下肢进行康复运动,即采用手动模式进行康复。或者通过控制主机51可控制下肢局部训练机构2上的飞轮自动旋转,带动两个脚踏板10旋转,通过两个自动旋转的脚踏板10带动病人的下肢作自动的康复运动,即采用自动模式进行康复。在术后病人下肢分别踩在脚踏板10上时,设置的每个弧形缓冲套11套在下肢的小腿部作保护作用。
请参阅图6、图10和图12,该用于术后局部康复训练装置中,下肢局部训练机构2还包括:
第一竖直支架24,设置在固定箱8的内部靠近座椅6的一端,其顶部设置有水平设置的第一轴套25,第一转轴9的中端转动设置在第一轴套25的内圈;
L型杆26,具有一对,反向设置在第一转轴9的两端,每个L型杆26远离第一转轴9的一端分别与脚踏板10固定连接。
当需要通过术后病人的脚部自行踩动每个脚踏板10时,通过第一竖直支架24、第一轴套25以及一对L型杆26形成了供术后病人采用手动模式进行康复的机械结构,术后病人的脚部分别踩动每个脚踏板10进行康复运动。
请参阅图11,每个脚踏板10的后侧均设有与脚踏板10呈九十度分布的固定板27,弧形缓冲套11位于固定板27靠近脚踏板10的一侧,弧形缓冲套11的内部粘设有橡胶面28,弧形缓冲套11靠近固定板27的一侧设有四个呈矩形分布的缓冲柱29,每个缓冲柱29分别穿过固定板27向外延伸,每个缓冲柱29上均套设有缓冲弹簧30,每个缓冲弹簧30的两端分别与弧形缓冲套11和固定板27的内侧相抵接,每个缓冲柱29的延伸端均设有能够与固定板27远离弧形缓冲套11的一侧抵接的抵接柱31。
在术后病人的脚部分别踩在每个脚踏板10上后,病人的下肢小腿分别抵接在对应的弧形缓冲套11内,并与对应的橡胶面28接触,通过橡胶面28作保护作用,防止刮伤术后病人的下肢腿部,在术后病人通过脚分别踩动脚踏板10时,设置的每个缓冲柱29、缓冲弹簧30以及抵接柱31作缓冲作用;
通过弧形缓冲套11上设置的每个缓冲柱29、缓冲弹簧30以及抵接柱31作缓冲作用,在支撑术后病人的下肢同时作保护作用。
请参阅图6、图10和图12,该用于术后局部康复训练装置中,下肢局部训练机构2还包括:
第二竖直支架32,设置在固定箱8的内部,其位于第一竖直支架24远离座椅6的一侧,其顶部设置有水平设置的第二轴套33;
第二转轴34,能够转动的设置在第二轴套33的内圈,其两端分别向第二轴套33的两侧外部延伸;
主动轮35,同轴设置在第二转轴34的一端;
从动轮36,同轴设置在第一转轴9靠近主动轮35的一端,从动轮36通过同步带与主动轮35传动连接;
测速传感器37,设置在固定箱8的内壁上,其工作端与第二转轴34远离主动轮35的一端传动连接,测速传感器37与控制主机51电性连接。
具体的,在术后本人脚部踩踏脚踏板10时,同时启动从动轮36旋转,从动轮36通过同步带驱动主动轮35和第二转轴34旋转,实现脚踏板10的自动旋转,形成了供术后病人采用自动模式进行康复的机械结构。通过测速传感器37的工作端检测第二转轴34的圈数,并将检测数值发送给控制主机51,控制主机51通过设有的显示单元显示运动的数值,便于术后病人得知训练的次数。
请参阅图2至图4、图6和图10,该用于术后局部康复训练装置中,下肢局部训练机构2还包括:
直线电动滑台38,竖直位于第二竖直支架32的上端一侧,其工作端朝第二竖直支架32的方向延伸,直线电动滑台38的一侧固定安装在固定箱8的内壁上,控制主机51与直线电动滑台38电性连接;
升降竖板39,设置在直线电动滑台38的工作端;
第三电机40,设置在升降竖板39上,控制主机51与第三电机40电性连接;
第三齿轮41,设置在第三电机40的输出端,其位于第二转轴34远离主动轮35的一端旁侧;
第四齿轮42,同轴设置在第二转轴34远离主动轮35的一端,第四齿轮42能够与第三齿轮41啮合设置。
具体的,当需要自动带动术后病人的下肢作康复训练时,控制主机51控制直线电动滑台38驱动升降竖板39、第三电机40和第三齿轮41移动到第四齿轮42的位置,使第四齿轮42与第三齿轮41啮合,控制主机51控制第三电机40驱动第三齿轮41旋转,通过第三齿轮41带动第四齿轮42旋转,第四齿轮42同时驱动第二转轴34和从动轮36旋转,从动轮36通过同步带驱动主动轮35和第一转轴9旋转,第一转轴9同时驱动两个脚踏板10转动,使术后本人的下肢通过自动转动的脚踏板10作康复训练;
通过第三齿轮41与第四齿轮42分离与啮合的方式,可选择性的控制脚踏板10自动与被动的作康复训练,即是自动模式还是手动模式,提高整个装置的实用性。
请参阅图7、图10和图13,该用于术后局部康复训练装置中,下肢局部训练机构2还包括:
竖直板43,竖直设置在固定箱8靠近座椅6的垂直面上,其两端分别设置有延伸座;
螺杆44,螺杆44竖直位于两个延伸座之间的中间位置,螺杆44的两端分别与对应的延伸座轴接;
第二限位光杆45,具有一对,对称设置在螺杆44的两侧,每个第二限位光杆45分别与螺杆44平行,每个第二限位光杆45的两端分别与每个延伸座的内侧连接;
移动块46,两个延伸座之间,移动块46的中部设有供螺杆44螺纹连接的螺纹穿孔,移动块46的两侧分别设有供每个第二限位光杆45穿行的限位穿孔;
把手47,位于竖直板43的正上方,把手47的底部中间处设有与螺杆44一端传动连接的转杆;
升降L型板48,竖直设置在移动块46的垂直面上,控制主机51设置在升降L型板48的上端位置。
具体的,根据术后病人的身高,可事先调节控制主机51的位置,调节时,手动转动把手47,带动转杆与螺杆44旋转,螺杆44驱动移动块46沿着螺杆44移动,通过设置的每个第二限位光杆45作限位移动,通过移动块46带动升降L型板48作升降调节,直至将控制主机51调节到合适位置停止;
通过人工事先转动把手47带动螺杆44、移动块46和控制主机51升降,可将控制主机51移动至合适的高度,便于术后病人观察控制主机51上的显示单元。
请参阅图13,升降L型板48的下端设置有平板支架49。
具体的,通过升降L型板48上的平板支架49能够将平板或者手机放置于平板支架49上;
通过平板支架49能够将平板或者手机进行架设,使术后病人在做康复训练时可通过手机或者平板观看手机或者平板上的节目,转移术后病人的注意力,使病人轻松康复训练。
请参阅图7和图8,平移机构3还包括:
第一限位光杆12,具有一对,沿着矩形底座4的长度方向平行设置的矩形底座4的两侧,平移板5的底部设有能够在每个第一限位光杆12上滑动的限位套13;
行走滚轮14,具有四个,呈矩形分别在平移板5的底部,矩形底座4的内部下端的两侧分别设有供每个行走滚轮14行走的轨道15。
当需要将座椅6沿着矩形底座4移动到靠近固定箱8的合适位置时,通过第一限位光杆12与对应的限位套13的滑动配合,以及行走滚轮14与对应的轨道15之间的配合,既能够实现上述的座椅6的平移过程。
考虑到,术后病人不方便利用平移机构3手动操作座椅6以及平移板5进行平移,请参阅图7和图8,平移机构3还包括:
第一齿条16,沿着矩形底座4的长度方向设置在两个第一限位光杆12之间,第一齿条16与两个第一限位光杆12平行设置;
第一电机17,设置在平移板5的顶部,其输出端能够转动的穿过平移板5的两面向下延伸;
第一齿轮18,传动设置在第一电机17的输出端,第一齿轮18与第一齿条16啮合设置,控制主机51与第一电机17电性连接。
具体的,当需要调节座椅6与脚踏板10的距离时,控制主机51控制第一电机17驱动第一齿轮18沿着第一齿条16移动,继而带动平移板5沿着矩形底座4的长度方向平移,在平移板5进行移动时,通过平移板5底部设置的每个限位套13分别沿着对应的第一限位光杆12限位移动,通过设置的每个行走滚轮14分别沿着对应的轨道15行走,使平移板5能够更加快速的带动座椅6进行水平调节。
结合之前内容,因此,通过平移板5底部设置的每个行走滚轮14分别沿着对应的轨道15行走,使平移板5能够更加快速的带动座椅6进行水平调节,提升座椅6与脚踏板10之间调节的效率。
请参阅图8和图9,自动升降管包括:
固定套管19,竖直设置在平移板5的顶部中间处;
升降内管20,能够升降的插设于固定套管19的内部,其顶端穿过固定套管19的顶部敞开端与座椅6的底部相连接;
第二齿条21,沿着升降内管20的长度方向设置在升降内管20的径向面上,固定套管19上设有避让第二齿条21升降的竖向穿口;
第二齿轮22,竖直位于第二齿条21的一侧,其与第二齿条21啮合设置;
固定套环23,固定套设于固定套管19的上端外圈,固定套管19靠近第二齿条21的一侧设有向第二齿轮22一侧延伸的延伸板,延伸板的远离第二齿轮22的一侧设置有第二电机50,第二电机50的输出端与第二齿轮22的中心处传动连接。
具体的,当需要调节座椅6时,每个控制主机51控制第二电机50,通过第二电机50驱动第二齿轮22沿着第二齿条21移动,继而带动升降内管20沿着固定套管19进行升降,同时通过升降内管20的端部带动座椅6进行升降,直至将座椅6升降到合适位置停止,随后术后病人坐在座椅6上,并将脚分别踩在脚踏板10上;
通过第二齿轮22与第二齿条21的配合,使升降套管更加快速的带动座椅6进行升降,提升座椅6的调节速度。
本发明的工作原理:
步骤一、具体的,当需要调节座椅6与脚踏板10的距离时,控制主机51控制第一电机17驱动第一齿轮18沿着第一齿条16移动,继而带动平移板5沿着矩形底座4的长度方向平移,在平移板5进行移动时,通过平移板5底部设置的每个限位套13分别沿着对应的第一限位光杆12限位移动,通过设置的每个行走滚轮14分别沿着对应的轨道15行走,使平移板5能够更加快速的带动座椅6进行水平调节;
通过平移板5底部设置的每个行走滚轮14分别沿着对应的轨道15行走,使平移板5能够更加快速的带动座椅6进行水平调节,提升座椅6与脚踏板10之间调节的效率;
步骤二、具体的,当需要调节座椅6时,每个控制主机51控制第二电机50,通过第二电机50驱动第二齿轮22沿着第二齿条21移动,继而带动升降内管20沿着固定套管19进行升降,同时通过升降内管20的端部带动座椅6进行升降,直至将座椅6升降到合适位置停止,随后术后病人坐在座椅6上,并将脚分别踩在脚踏板10上;
通过第二齿轮22与第二齿条21的配合,使升降套管更加快速的带动座椅6进行升降,提升座椅6的调节速度;
步骤三、具体的,当需要通过术后病人的脚部自行踩动每个脚踏板10时,术后病人的脚部分别踩动每个脚踏板10进行康复运动;
步骤四、具体的,在术后病人的脚部分别踩在每个脚踏板10上后,病人的下肢小腿分别抵接在对应的弧形缓冲套11内,并与对应的橡胶面28接触,通过橡胶面28作保护作用,防止刮伤术后病人的下肢腿部,在术后病人通过脚分别踩动脚踏板10时,设置的每个缓冲柱29、缓冲弹簧30以及抵接柱31作缓冲作用;
通过弧形缓冲套11上设置的每个缓冲柱29、缓冲弹簧30以及抵接柱31作缓冲作用,在支撑术后病人的下肢同时作保护作用;
步骤五、具体的,在术后本人脚部踩踏脚踏板10时,同时启动从动轮36旋转,从动轮36通过同步带驱动主动轮35和第二转轴34旋转,通过测速传感器37的工作端检测第二转轴34的圈数,并将检测数值发送给控制主机51,控制主机51通过设有的显示单元显示运动的数值,便于术后病人得知训练的次数;
通过测速传感器37将检测数值发送给控制主机51,方便术后病人得知训练的次数;
步骤六、具体的,当需要自动带动术后病人的下肢作康复训练时,控制主机51控制直线电动滑台38驱动升降竖板39、第三电机40和第三齿轮41移动到第四齿轮42的位置,使第四齿轮42与第三齿轮41啮合,控制主机51控制第三电机40驱动第三齿轮41旋转,通过第三齿轮41带动第四齿轮42旋转,第四齿轮42同时驱动第二转轴34和从动轮36旋转,从动轮36通过同步带驱动主动轮35和第一转轴9旋转,第一转轴9同时驱动两个脚踏板10转动,使术后本人的下肢通过自动转动的脚踏板10作康复训练;
通过第三齿轮41与第四齿轮42分离与啮合的方式,可选择性的控制脚踏板10自动与被动的作康复训练,提高实用性;
步骤七、具体的,根据术后病人的身高,可事先调节控制主机51的位置,调节时,手动转动把手47,带动转杆与螺杆44旋转,螺杆44驱动移动块46沿着螺杆44移动,通过设置的每个第二限位光杆45作限位移动,通过移动块46带动升降L型板48作升降调节,直至将控制主机51调节到合适位置停止;
通过人工事先转动把手47带动螺杆44、移动块46和控制主机51升降,可将控制主机51移动至合适的高度,便于术后病人观察控制主机51上的显示单元;
步骤八、具体的,通过升降L型板48上的平板支架49能够将平板或者手机放置于平板支架49上;
通过平板支架49能够将平板或者手机进行架设,使术后病人在做康复训练时可通过手机或者平板观看手机或者平板上的节目,转移术后病人的注意力,使病人轻松康复训练。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种用于麻醉科术后局部康复训练装置
- 一种用于麻醉科术后局部康复训练装置