一种计及扭矩精度的车用永磁同步电机矢量弱磁控制系统
文献发布时间:2023-06-19 12:24:27
技术领域
本发明属于永磁同步电机控制领域,尤其涉及一种计及扭矩精度的车用永磁同步电机矢量弱磁控制系统。
背景技术
在车用内嵌式永磁同步电机(IPMSM)控制系统中,由于实际应用场景中被控对象—IPMSM不可避免地出现变化而使得控制程序中预先固化的控制参数失效,导致电机高速运行弱磁不足引起电压饱和,危及电机驱动系统的稳定性。
内嵌式永磁同步电机具有功率密度大,运行范围宽和效率高的特点而被广泛用于电动汽车的驱动电机;其转矩方程为:
其中,
由上式可以看出,转矩与电流成正相关,但不同的dq轴电流组合会对应不同的转 矩,每个固定的电流幅值下都会有一组特定的dq电流组合使电机在该电流下能输出最大的 转矩。由于磁场饱和,在电流大于某个范围后dq轴电感
此外,车用IPMSM的运行依赖由逆变器将动力电池的母线转换为三相交流电,这就意味着电机端电压受到直流母线的约束;IPMSM的电压方程为:
其中,
在高速稳态下,电机端电压
|
当电机转速升高时,电机端电压升高,当期超过母线电压能提供的交流电压幅值 时就需要进行弱磁控制,而当前母线下能提供的最大交流电压为电压限制
其中,
为了获得既能满足转矩方程,又能满足电压限制的电流组合,仍然通过实验的手段标定获取不同母线和转速下每个转矩对应的dq电流组合;而后将这些数据制成表格存储在数字控制芯片中,在电机实时运行时通过查表将不同转速和母线电压下的转矩指令转换成对应的dq电流指令。
上述过程能正常工作的前提是,通过对样机实验标定获取的电流组合能够适用于同款每一台电机;而在实际应用中,有以下几个方面会造成这种假设不再成立:
1.电机在批量生产时工艺、物料不可避免的会导致电机的不一致性;
2.电机的旋变偏移量产生偏差时,即使在电流调节器正常工作的情况下,也会导致控制上磁场定向偏差,进而导致电机中的实际dq电流与期望的电流指令不一致;
3.环境温度的变化会对永磁体磁链产生影响,在温度降低时,会使
因此,为了增强电驱动控制系统的高速运行区域的鲁棒性,一般都会加入弱磁控制环节。
针对电机控制弱磁问题,专利文献CN101855825B提出了一种较为代表性的解决方 案,如图1所示,根据电流调节器输出的电压与电压限制作差得到电压偏差,将该偏差经过 比例积分环节(PI)得到电流修正量△I
发明内容
本发明的目的在于针对现有技术的不足,提供一种计及扭矩精度的车用永磁同步电机矢量弱磁控制系统。
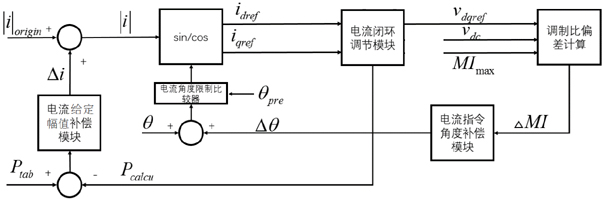
本发明的目的是通过以下技术方案来实现的:一种计及扭矩精度的车用永磁同步电机矢量弱磁控制系统,包括电流闭环调节模块、调制比偏差计算模块、电流指令角度补偿模块、电流角度预设模块、电流指令角度限制比较器、电流给定幅值补偿模块和电流给定矢量修正模块;
电流闭环调节模块的输入为电流给定矢量修正模块输出的dq电流指令,经过比例积分控制器后,输出dq电压指令,并计算实时功率;
调制比偏差计算模块的输入为电流闭环调节模块输出的dq电压指令,经过平方和开方得到期望的调制比
电流指令角度补偿模块的输入为调制比偏差计算模块输出的调制比偏差,经过比例积分补偿器后,输出校正角度;
电流角度预设模块用于预设电流角度;
电流指令角度限制比较器用于将电流指令角度补偿模块输出的校正角度补偿后的电流角度,限定在电流角度预设模块预设的电流角度之上;
电流给定幅值补偿模块的输入为有功功率与实时功率之差△
电流给定矢量修正模块的输入为经过电流给定幅值补偿模块输出的电流给定幅值调节量补偿后的电流大小|
所述电流闭环调节模块中,通过dq电流指令i
其中,
进一步地,所述调制比偏差计算模块中,
△
其中,
进一步地,所述电流指令角度补偿模块中,校正角度△θ:
其中,
进一步地,所述电流角度预设模块对电机的定向进行最大转矩电流比MTPA电流角度曲线刻画限制,将电流角度预设为θ
进一步地,所述电流指令角度限制比较器用于将电流角度限制为:当θ+△θ>θ
进一步地,所述电流给定幅值补偿模块中,电流给定幅值调节量△
△
其中,
进一步地,所述电流给定矢量修正模块中,计算d轴电流指令
|
其中,|
本发明的有益效果如下:
1、本发明调节方向永远是弱磁向,不会出现反复调节造成的失稳;
2、本发明通过引入dq电流同时修正,可以将抗电压饱和的压力分摊至dq电流,避免因单轴电流调节过多而导致输出转矩偏差过大;
3、本发明在保证系统受控不失稳的传统弱磁目标的同时,保证了扭矩的精度。
附图说明
图1是一种弱磁控制现有技术的拓扑结构框图;
图2是本发明整体拓扑结构框图;
图3是调制比偏差计算环节示意图;
图4是电流指令角度补偿模块示意图;
图5是电流角度预设模块设定预设角度示意图;其中,电流的单位均为A;
图6是电流给定幅值补偿模块示意图;
图7是弱磁区电流角度修正示意图;
图8是修正前后电流角度变化趋势示意图;其中,1为修正前,2为修正后;
图9是修正前后电流角度对比图;
图10为电驱系统M1和M2的实测的电流-扭矩曲线的对比图;其中,扭矩的单位均为Nm;
图11为电驱系统M1和M3的实测的电流-扭矩曲线的对比图。
具体实施方式
本发明在保证驱动系统安全的同时,尽可能减小弱磁控制环节对驱动系统输出转矩的影响。为了达到以上目的,如图2所示,本发明一种计及扭矩精度的车用永磁同步电机矢量弱磁控制系统,包括:
1、电流闭环调节模块:该部分为本发明的依赖模块,其作用是通过dq电流指令i
然后,实时计算功率
其中,
2、调制比偏差计算模块:如图3所示,期望的调制比
其中,v
△
再经过低通滤波器(LPF)得到调制比偏差△
3、电流指令角度补偿模块:如图4所示,以调制比偏差计算模块的输出△
其中,k
4、电流角度预设模块:如图5所示,对标准电机的定向进行最大转矩电流比MTPA电流角度曲线刻画限制,根据dq电流曲线在MTPA(1000)rpm进行赋值,电流角度限制预设为θ
5、电流指令角度限制比较器:将电流指令角度补偿模块补偿后的角度限定在电流角度预设模块的预设角度θ
6、电流给定幅值补偿模块:在电机参数(磁链、电感等)不一致的时候,通过在标定电流的基础上进行增减,达成批量电机的出力一致。在电流指令角度补偿模块完成角度补偿后,认为系统已经满足弱磁之稳定性要求,进而对其出力进行校正。
将此时应运行的有功功率
△
其中,有功功率
将△
其中,k
7、电流给定矢量修正模块(sin/cos):综合电流角度预设模块和电流给定幅值补偿模块,计算出d轴弱磁后的电流i
|
其中,|
本发明工作过程具体包括如下步骤:
(1)电流角度预设模块将电流角度限制预设为θ
(2)|
(3)θ为弱磁之前电流矢量的角度,被△θ补偿后的电流角度为θ+△θ;其中,△θ为电流指令角度补偿模块给出的校正角度。初始时,△θ
(4)电流指令角度限制比较器将补偿后的电流角度限定在预设角度θ
(5)补偿后的电流矢量幅值大小|
(6)电流闭环调节模块根据i
(7)调制比偏差计算模块根据v
(8)调制比偏差△
(9)查表得到有功功率
本实施例基于上述所有模块构建电驱系统M1,获得同一电驱系统M1下的测试数据如图7~9,证明电流角度预设模块、电流指令角度限制比较器、电流给定矢量修正模块的有效性。如图7所示,从箭头指出的弱磁拐点开始,电流指令角度限制比较器和电流给定矢量修正模块开始作用,dq电流运行曲线发生相应角度的变化。如图8所示,电流角度在弱磁区自动进行了修正。如图9所示,图中曲线斜率不为1时,表示实际角度大于预设角度θ
去除电驱系统M1中的电流给定幅值补偿模块得到另一电驱系统M2,且设定M2的电流采样增益高于M1,上浮比例为3%;如图10所示,电驱系统M2的电流采样增益大于M1,导致M2实际扭矩小于M1。在电驱系统M2中加入电流给定幅值补偿模块得到电驱系统M3,M2和M3的电流采样增益相同。如图11所示,使用电流给定幅值补偿模块的电驱系统M3的扭矩与M1基本一致。综上,图10~11证明了电流给定幅值补偿模块的有效性。
- 一种计及扭矩精度的车用永磁同步电机矢量弱磁控制系统
- 一种车用永磁同步电机矢量弱磁控制方法