一种多用途自主定位导航二合一消毒机器人
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及先进智能制造领域,特别涉及一种多用途自主定位导航二合一消毒机器人。
背景技术
已公开的技术专利中,关于移动机器人、消毒杀菌、自主移动、人机交互等多种技术相结合的形式有很多种,但对于室内环境中多种场景地图、人员稠密状态、空间变换范围广等特点的因素,目前智能消毒机器人的适应范围较小,或者存在诸多不利特性,影响其使用效果,比如不能规划有效最短路径达到指定地点、不能应急避障、不能识别相似环境、不能识别人员进入禁区、不能达到足够的输出功率、不能处理应急充电和规定任务的优先处理级别等等。
发明内容
为了解决上述技术问题,本发明中披露了一种多用途自主定位导航二合一消毒机器人,本发明的技术方案是这样实施的:
一种多用途自主定位导航二合一消毒机器人,包括底座、本体、超干雾喷嘴、人体红外探测器、紫外消毒模块、LED灯、消毒液仓门、导航激光传感器、超声波雷达传感器、充电电极、扬声器和驱动结构;
其中,所述超干雾喷嘴位于所述本体顶部,所述人体红外探测器安装于所述本体上方侧边,所述驱动结构安装于所述底座底部,所述超声波雷达传感器安装于所述底座中侧,所述导航激光传感器安装于所述底座上侧,所述扬声器安装于所述底座上侧,所述LED灯和所述消毒液仓门位于所述本体中侧,所述底座侧边设置有数据接口面板,所述充电电极位于所述底座一侧;
所述本体内部设置有超声波发生器、防水风扇、逆变器和导雾筒;所述导雾筒内设置有导雾管,所述储液箱和所述逆变器位于所述底座上,所述超声波发生器位于所述储液箱上,所述防水风扇安装于所述超声波发生器上,所述导雾筒位于所述超声波发生器上;
所述底座内部设置有控制模块和电池组;所述控制模块安装于所述电池组上。
优选地,所述控制模块包括下层电气模块、中层电气模块和上层电气模块;所述上层电气模块、所述中层电气模块和所述下层电气模块自上而下安装于所述电池组上。
优选地,所述上层电气模块设置有中央控制器、信号协议转换器和编码器。
优选地,所述紫外消毒模块包括紫外灯管、反光板和防护网;所述紫外灯管位于所述反光板和所述防护网之间。
优选地,所述驱动结构包括驱动轮、支撑轮和驱动电机,所述驱动轮位于所述底座两侧,所述支撑轮数量为4,安装于所述底座底部,所述驱动电机位于所述底座内部并连接所述驱动轮。
优选地,还包括自动充电桩;所述自动充电桩安装于墙壁上,所述自动充电桩上设置有所述充电电极匹配的充电孔。
优选地,还包括触摸屏;所述触摸屏安装于所述本体侧面。
优选地,还包括紧急按钮;所述紧急按钮位于所述本体一侧。
优选地,所述紫外消毒模块数量为4,所述紫外消毒模块之间的角度为90 度。
实施本发明的技术方案可解决现有技术中智能消毒机器人的适应范围较小,或者存在诸多不利特性,影响其使用效果,比如不能规划有效最短路径达到指定地点、不能应急避障、不能识别相似环境、不能识别人员进入禁区、不能达到足够的输出功率、不能处理应急充电和规定任务的优先处理级别的技术问题;实施本发明的技术方案,通过结合紫外灯、超干雾消毒液二种方式进行杀毒,采用激光导航,自主识别环境并建立地图,采用超声波雷达传感器、红外传感器、紧急按钮保证行驶中的安全,以及防止紫外灯作业时人员的靠近,可实现将消毒机器人的效果发挥到最合适的状态,即达到杀菌的功率但不过于庞大,能够自主定位导航但成本比较低,能够检测到人员意外干预但不伤害人员,能够保证安全以及额外的防范措施但安全措施不冗余的技术效果。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一种实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
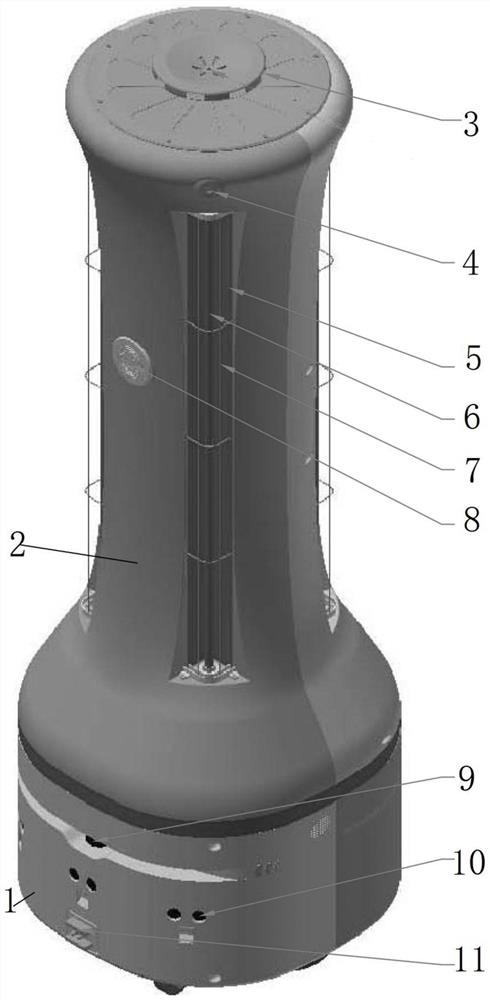
图1为本发明前方斜视图;
图2为本发明后方斜视图;
图3为本发明底部视图;
图4为本体内部结构示意图;
图5为底座内部结构示意图。
在上述附图中,各图号标记分别表示:
1,底座
2,本体
3,超干雾喷嘴
4,人体红外探测器
5,反光板
6,紫外灯管
7,防护网
8,LED灯
9,导航激光传感器
10,超声波雷达传感器
11,充电电极
12,触摸屏
13,电源开关
14,紧急按钮
15,通风孔
16,消毒液仓门
17,扬声器
18,数据接口面板
19,驱动轮
20,支撑轮
21,导雾筒
22,防水风扇
23,超声波发生器
24,储液箱
25,逆变器
26,上层电气模块
27,中层电气模块
28,下层电气模块
29,电池组
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
在一种具体的实施例中,如图1、图2、图3、图4和图5所示,一种多用途自主定位导航二合一消毒机器人,包括底座1、本体2、超干雾喷嘴3、人体红外探测器4、紫外消毒模块、LED灯8、消毒液仓门16、导航激光传感器9、超声波雷达传感器10、充电电极11、触摸屏12、扬声器17和驱动结构;
驱动结构包括驱动轮19、支撑轮20和驱动电机,驱动轮19位于底座1两侧,支撑轮20数量为4,安装于底座1底部,驱动电机位于底座1内部并连接驱动轮 19;
其中,超干雾喷嘴3位于本体2顶部,人体红外探测器4安装于本体2上方侧边,驱动结构安装于底座1底部,超声波雷达传感器10安装于底座1中侧,导航激光传感器9安装于底座1上侧,扬声器17安装于底座1上侧,LED灯8 和消毒液仓门16位于本体2中侧,底座1侧边设置有数据接口面板18;紫外消毒模块包括紫外灯管6、反光板5和防护网7;紫外灯管6位于反光板5和防护网7之间;紫外消毒模块数量为4,紫外灯管6之间的角度为90度,触摸屏12安装于本体2侧面,触摸屏12底部设置有电源开关13和紧急按钮14。
本体2内部设置有超声波发生器23、逆变器25、防水风扇22和导雾筒21;导雾筒21内设置有导雾管,储液箱24和逆变器25位于底座1上,超声波发生器23位于储液箱24上,导雾筒21位于超声波发生器23上,防水风扇22安装于超声波发生器23上;
底座1内部设置有电池组29、下层电气模块28、中层电气模块27和上层电气模块26;控制模块安装于电池组29上,上层电气模块26、中层电气模块27 和下层电气模块28自上而下安装于电池组29上。上层电气模块26设置有中央控制器、信号协议转换器和编码器。
本体2侧边设置有通风孔15用于辅助散热,防止本体2内部温度过高损坏内部结构,延长使用寿命。
在本实施例中,超干雾喷嘴3和紫外灯管6两者对应两种消毒方式,对比市面消毒方式单一的机器人效果更好,且采用两种消毒方式结合的消毒效果也比单独的采用两种不同种类的消毒机器人进行消毒效果更好,也更加省钱。
本实施例集成了激光定位与建图导航软件、驱动舵轮控制软件、智能中控软件等多种软件,采用激光的定位建图导航比单纯的激光测距避障导航更加优越,能够识别整体行驶区域的面积,能够更合理地规划路径。
人外红外探测器4用于检测前方人员,超声波雷达传感器10用于检测底面障碍,采用人体红外探测器4、超声波雷达传感器10等多种安全传感器比单独的传感器更加可靠,并且考虑与人员的避障和干扰,结合导航激光传感器9实现路径自动规划。
四个紫外灯管6布置在四周可以更好地发射紫外线,无遮挡的设置更有利于杀菌,照射到机器人的紫外线也通过反光板5反射回来,做到最大化利用紫外线。
超干雾消毒液比空气密度大,与空气自然对流时会向下流动,所以把出口设置在本体2顶部更有利于消毒液与空气的接触。
本实施例呈现细腰圆柱的外形,接近常规人体的高度和肩宽,以人行大小的形式出现在人员活动的区域,能够被更好地辨认识别,防止惊吓人员、无意碰撞、伤害人员等。
本实施例中的紧急按钮14用于工作人员控制机器人紧急制动,工作人员可通过触摸屏12对机器人进行操作,或观察机器人当前状态。
本实施例中采用LED灯8和扬声器17两种方式进行预警,采用LED灯8不同颜色的的光线来显示机器人的不同状态,扬声器17用于提醒行人躲避或报警。
本实施例的消毒过程如下:机器人首先在作业场景中建立地图,接收人员的控制命令,规划合理形式的路径;接着机器人的超声波发生器23开始动作,将消毒液振荡成纳米级的微小液滴,然后通过防水风扇22将微小液滴吹出超干雾喷嘴3,消毒液滴弥散在空气中达到消毒效果;再次机器人控制紫外灯管6开启,通过灯管发射紫外线的形式进行消毒,当储液箱24内消毒液不足时,通过消毒液仓门16进行加液操作。消毒过程中机器人可自动导航,结合医院或工作场景中的电梯控制或自动门控制系统自主寻路,上楼下楼等,工作过程中机器人自动躲避行人和地面障碍物,运行更加稳定。
本实施例配合自动充电桩可以实现自主充电:机器人在作业场景中建立地图后,设置自动充电桩的实际位置,并在虚拟地图中关联地图的定位。当机器人检测到电池电量达到临界值时,启动自动充电程序,自主规划到达自动充电桩的路径,自主避障,到达自动充电桩后,机器人将充电电极11对准充自动充电桩后充电。
本实施例将消毒机器人的效果发挥到最合适的状态,即达到杀菌的功率但不过于庞大,能够自主定位导航但成本比较低,能够检测到人员意外干预但不伤害人员,能够保证安全以及额外的防范措施但安全措施不冗余。
需要指出的是,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种多用途自主定位导航二合一消毒机器人
- 一种多用途自主定位导航巡检测温机器人