一种三相并行磁路电机
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种三相并行磁路电机,属于特种电机领域。
背景技术
由于高能量密度稀土永磁材料的发展,永磁电机在更多场合得到了越来越多的应用。其中一个领域就是低速大转矩场合应用,包括混合电动汽车和风力发电领域。永磁电机也为工业及空间机械人机械臂的直驱电机应用提供了选择。根据永磁体和电枢线圈是否有相对转动,可以将永磁电机划分为定子永磁电机和转子永磁电机。相较于转子永磁电机,定子永磁电机具有更高的功率密度。
并行磁路技术由美国人Charles.J.Flynn提出,是一种先进的磁路控制技术,可应用于电机,旋转励磁器,线性励磁器以及发电机领域。并行磁路技术中,永磁体和线圈并行放置,永磁体磁通和线圈电流磁通在铁芯中处于并行关系,并行磁路装置能产生更大的力和力矩。并行磁路电机相较于传统转子永磁电机,体积更小,质量更轻,具有更高的功率密度和效率。
由于并行磁路电机具有的独特的对称结构,其本质上属于特殊的步进电机,具有单相结构,启动时无法控制方向,为了实现电机连续可控的运动,将电机设计成三相定子结构,三相定子沿轴向分布,沿圆周方向彼此错开120度电角度,三相定子共用一个转子,利用矢量控制方法对三相并行磁路电机进行控制,电机具有更高的功率密度,针对特殊应用场合,以获得低速大转矩等所需要的特性。
发明内容
本发明提出了一种三相并行磁路电机,实现大的转矩密度,同时体积小,质量轻,适用于空间机器人关节应用,以省去减速装置,适应直驱应用。
本发明为解决其技术问题采用如下技术方案:
一种三相并行磁路电机,该电机为三相定子单转子结构,三相定子结构相同,沿电机轴向分布,彼此空间上沿圆周方向错开120度电角度,转子为凸极结构,无永磁体和线圈;单相定子由N个H桥电枢结构构成,永磁体均匀排布于H桥电枢之间,永磁体数量和H桥电枢结构数量一致,相邻永磁体磁场方向相反,线圈绕制在H桥电枢轭上。
所述转子为双凸极结构,转子由高磁导率材料片叠压而成。
所述三相定子错开机械角度与永磁体数量之间的关系为:
其中,θ
本发明的有益效果如下:
本发明的三相并行磁路电机体积更小,重量更轻;具有更高的功率密度和效率。适用于低速大转矩场合,以及某些直驱场合;温度适应性好,适应于空间应用。
附图说明
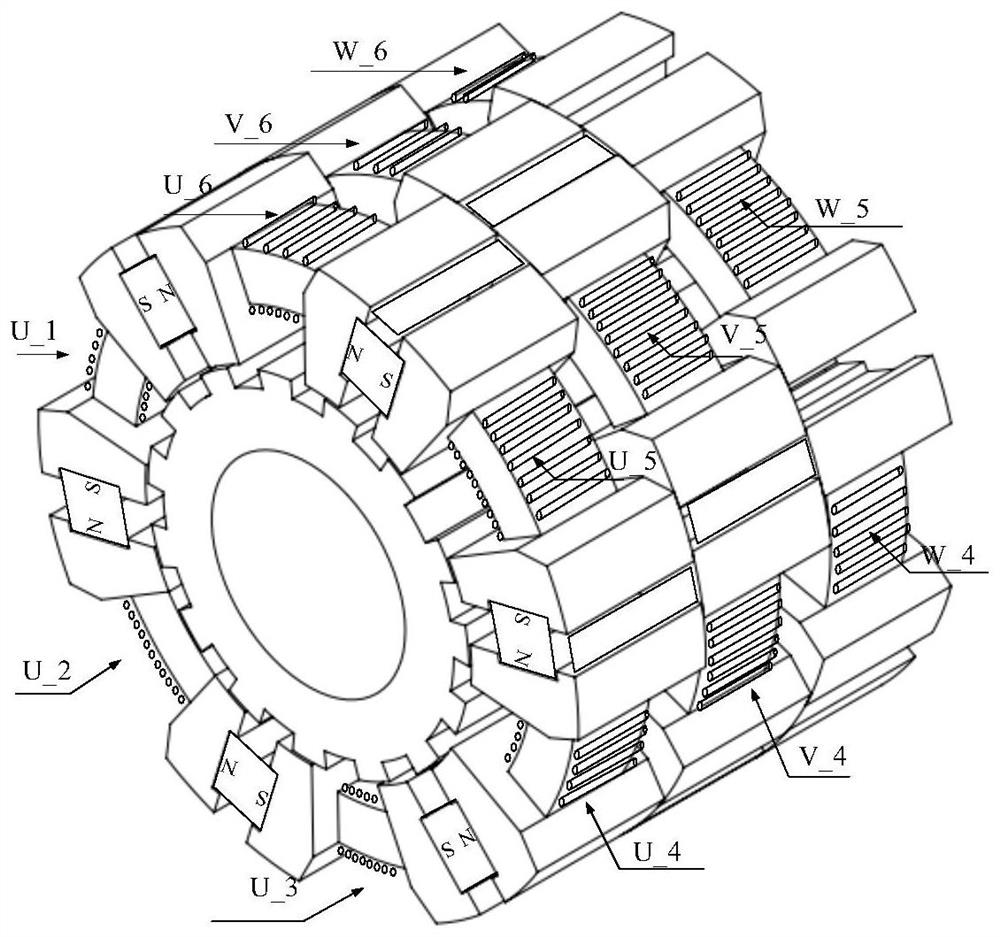
图1为三相并行磁路电机结构示意图。
图2为单相并行磁路电机结构示意图,其中:1-定子H桥电枢结构;2-永磁体;3-H桥电枢轭绕线槽;4-转子;5-电枢线圈;6-定子凸极极靴。
图3为单相并行磁路电机尺寸角度示意图。
图4为定子H桥电枢结构绕线示意图。
图5是电枢线圈串联并通入电流时的并行磁路电机的磁路状态图。
图6是电枢线圈串联并通入反方向电流时的并行磁路电机的磁路状态图。
图7(a)是并行磁路电机全桥控制电路拓扑图,图7(b)是三相全桥控制电路拓扑图。
具体实施方式
下面结合附图对本发明作详细描述。
实施方式:针对空间机械臂直驱关节应用场景提出本实施方式。空间机械臂精密操作对于操作精度具有较高要求,高精度直驱关节有较大的应用价值。三相并行磁路电机由于具有高功率密度特性,能够满足低速大转矩的应用需求。
电机为单转子多相定子结构,定子结构相同,轴向分布,彼此沿圆周方向错开相同机械角,相当于多电机并联应用,任意N相定子单转子并行磁路电机适用于本发明保护范围。三相定子沿轴向分布,在圆周方向彼此错开120度电角度,所述电机适用于矢量控制(定子磁场定向控制)策略。三相并行磁路电机具有出力大,功率密度高,质量轻,温升低等优点,适用于低速直驱场合以及空间应用等。
一种三相并行磁路电机包含三相定子结构和一个转子,电机转子为对称凸极结构,均匀分布,在6极三相并行磁路电机结构中,转子具有15个凸极,单相电机定子具有6个H桥电枢结构以及6个永磁体,线圈绕制在H桥电枢轭上。单相并行磁路电机满足并行磁路原理,6组线圈彼此串联形成单相绕组。
所述6极三相并行磁路电机定子极靴所对应的机械圆周角度为12度,一个电周期所对应的机械圆周角度为24度。三相定子具有相同的结构,沿轴向分布,圆周方向彼此错开8度机械角度,即120度电角度。三相定子线圈的反电势波形为具有120度相位差的三相正弦波。因而适用于定子磁场矢量控制方法。
为了对电机进行控制,需要检测电机转子位置,在电机转轴上安装绝对编码器,为驱动器的控制提供转子位置信息。利用坐标变换,将定子三相交流电的控制转化为对应于转子坐标系的直流量的控制。三相并行磁路电机具有效率高、功率密度大、温升低等一系列特点。
对于三相并行磁路电机的控制,控制电路可以采用全桥电路或者三相全桥电路对电机进行控制,全桥电路适应于电流斩波控制、位置角度控制等方法,三相全桥电路适应定子旋转磁场矢量控制方法。
如图1所示,为单相并行磁路电机结构,永磁体2和电枢线圈5都在电机定子上,电机定子由6个相同H桥电枢结构构成,线圈绕制在H桥电枢结构的轭部,线圈采用集中绕组方式,6组线圈串联成单相绕组,永磁体2夹在定子H桥电枢结构之间,相邻永磁体2极性相反,永磁体数量和定子H桥电枢结构数量保持一致。
永磁体磁场的存在,使得电机在空载状态下存在抱闸力,从而能够省去电机的抱闸制动装置,并行磁路电机运行原理本质上也是基于“最小磁阻原理”。如图4和图5,线圈通某个方向的电流时,相邻永磁体总有一个永磁体极靴下气隙磁场被加强,另一个永磁体极靴下的气隙磁场被削弱。切换电流方向时,永磁体磁场的变化情况变得相反。
单相并行磁路电机存在启动问题,电机启动时无法控制转动方向。为了解决启动问题并进一步减小转矩脉动,设计三相定子并行磁路电机,将6个定子H桥电枢结构沿圆周方向整合成单个定子,H桥电枢结构上绕组线圈串联成单相绕组。三相定子沿轴向分布,单相并行磁路电机单个电周期对应的圆周机械角度为24度,彼此错开8度机械角度,则三相定子线圈感应电动势为三相具有120相位差的正弦波,因而适用于磁场定向矢量控制方法。
在电机转轴上安装绝对位置编码器,配合驱动控制电路,可实现电机的位置和速度控制,可应用于机器人直驱关节中。
图2为6极单相并行磁路电机正视图,定子由6个H桥定子轭结构及6个永磁体组成,转子具有15对极。图中转子齿和定子极靴处于完全重合的状态。
图3展示了定子轭H桥结构极靴中心线之间的机械角度,H桥结构极靴中心线与永磁体中心线之间的机械角度以及转子凹凸极中心线之间的机械角度。H桥电枢结构两边极靴中心线之间的机械角度为:
其中,N为定子永磁体数量。H桥电枢结构极靴中心线与相邻永磁体中心线之间的机械角度为:
以及转子凹凸极(凹凸极占空比为50%)中心线之间的机械角度为:
转子凸极数和定子永磁体数量N满足如下关系:
其中,P
图5和图6分别是线圈电流不同方向时的磁路状态,其中6组线圈串联,磁场方向沿圆周一致,与永磁体磁场处于并行状态,共同作用,产生图示的磁场状态。图7(a)是并行磁路电机全桥控制电路拓扑,图7(b)是三相全桥控制电路拓扑。
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种三相并行磁路电机
- 一种用于小型电机定子的三相并行自动缠线装置