一种自动跟随机器人的避障装置
文献发布时间:2023-06-19 12:27:31
技术领域
本发明属于机器人自动化控制技术领域,具体涉及一种自动跟随机器人的避障装置。
背景技术
当我们出门携带质量大的物体时,经常需要行李箱、麻袋、提包等各种载物工具,双手得不到解放,而且耗费大量的体力,目前市场上已经出现能够通过信号控制的自动跟随的机器人等载物工具,但由于存在信号丢失或传感器缺陷等问题,实现自动跟随难度较大。另外,在机器人自动跟随的过程中,还需要适应不同的路况,对周围环境信息进行预判,做到及时躲避障碍物。
目前,现有技术中的避障装置只能检测到固定方向范围内是否有障碍物,当运动装置改变运动方向时,就需要依赖操作者判断周围是否有障碍物,不能有效检测运动方向范围内的障碍物,容易发生与障碍物碰撞的危险,不仅降低了用户操作的安全性,也降低了用户使用避障技术的体验度。
具备此两种功能的机器人还不多见,此种机器人可以极大地解放人的双手,节省体力,减轻负担,因此,有必要研发设计一种既能够自动跟随又能够自动躲避障碍物的载物装置。
发明内容
本发明的目的在于提供一种自动跟随机器人的避障装置,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种自动跟随机器人的避障装置,包括机器人本体以及设置在机器人本体上的:安置仓、照明灯、第一驱动装置、第二驱动装置以及控制盒。
其中,所述安置仓的两侧均固定安装有电动履带。
进一步的,设置的安置仓内部为空腔结构,用于放置传输设备和动力驱动设备,且安置仓内部为密闭的结构,起到防水作用,从而使内部保持干燥状态,保护电路,设置的电动履带用于带动安置仓的前后移动,相比传统的万向轮,电动履带负载能力大,越障能力强,能够适应复杂环境和地形,其实用性较强。
其中,一对所述照明灯分别固定安装在安置仓的前后两侧。
进一步的,设置的一对照明灯可对昏暗的场所提供照明,方便照亮周围的环境,便于装置移动,且一对照明灯的输入端均与控制盒内的电源模块电性连接。
其中,所述第一驱动装置包括涡轮,所述涡轮转动连接在安置仓上表面的一侧。
进一步的,通过设置的第一驱动装置可带动控制盒进行水平方向的周转,用于增强激光发射镜头的视野,便于激光发射镜头的前后水平角度调整,可根据实际情况进行调整,使适用范围更广。
其中,所述第二驱动装置包括衔接盘和安装平台,所述衔接盘与涡轮通过销轴固定安装在一起。
进一步的,通过设置的第二驱动装置可带动控制盒进行不同维度的俯仰转动,进一步了加强装置的适用范围。
其中,所述控制盒固定安装在安装平台上。
进一步的,通过设置的安装平台可以实现控制盒的增稳,无论机器人本体如何动作,均可以保持控制盒稳定地朝向一个方向,从而使避障模块采集到的信息可以更稳定。
作为本发明一种优选的,所述安置仓上设置有内置腔,位于内置腔周边的安置仓上垂直焊接有支撑柱,相邻所述支撑柱之间焊接有连接梁。
作为本发明一种优选的,位于内置腔远离第一驱动装置一侧的安置仓上垂直焊接有导柱,所述导柱上端设置有警示灯。
作为本发明一种优选的,所述第一驱动装置还包括罩壳,所述罩壳内转动连接有蜗杆,所述蜗杆的一端贯穿出罩壳,且贯穿出的一端上通过联轴器转动连接有驱动电机,所述蜗杆与涡轮啮合连接在一起。
作为本发明一种优选的,所述衔接盘上表面中心处垂直焊接有立柱,所述立柱上焊接有第一U形架,所述第一U形架开口处的两端均固定安装有一对第一转轴座,位于第一U形架的外侧设置有矩形框,所述矩形框上设置有一对第二转轴座,一对所述第一转轴座与一对第二转轴座之间转动连接有十字轴,一对所述第二转轴座上表面之间固定连接有第二U形架,所述安装平台的下表面与第二U形架焊接固定。
作为本发明一种优选的,位于第二转轴座外侧的矩形框上焊接有第三U形架,所述第三U形架中部呈半球结构,所述矩形框上相邻所述第三U形架的位置上焊接有第四U形架,所述第四U形架中部呈半球结构,所述衔接盘上通过转动座转动连接有第一电动推杆和第二电动推杆,所述第一电动推杆和第二电动推杆的活动端上均同轴套设有万向球,一对所述万向球分别转动套设在第三U形架与第四U形架的半球结构内。
作为本发明一种优选的,每一所述转动座包括一对耳板,一对所述耳板上均开有转动孔,一对所述转动孔之间转动连接有销轴。
作为本发明一种优选的,所述控制盒上远离警示灯的一侧设有激光接收口和激光发射镜头,所述控制盒上表面设置有激光电源按钮和显示屏,所述控制盒内设置有电源模块。
作为本发明一种优选的,每一侧所述电动履带上均设置有一对超声波测距仪,所述超声波测距仪包括信号处理板、单片机、超声波发射头、晶振以及超声波接收头,所述信号处理板与单片机焊接连接,所述超声波发射头与超声波接收头位于同一平面上,所述晶振与信号处理板通过电连接。
作为本发明一种优选的,所述激光接收口、显示屏的开口槽与控制盒为一体化结构,且激光发射镜头嵌于控制盒中。
本发明的有益效果:
1、本发明通过设置的第一驱动装置,通过启动驱动电机,驱动电机的输出端带动蜗杆转动,由于蜗杆与涡轮啮合连接在一起,从而使涡轮带动衔接盘转动,从而带动控制盒进行水平方向的周转,增加水平方向的视野,探测到多方位的障碍。
2、本发明通过设置的第二驱动装置,第一电动推杆的活动端通过第三U形架带动矩形框以一对第一转轴座之间的十字轴为转动点进行转动,当第二电动推杆工作时,第二电动推杆的活动端通过第四U形架带动矩形框以一对第二转轴座之间的十字轴为转动点进行转动,从而带动控制盒随时保持平稳状态。
3、本发明通过设置的控制盒与超声波测距仪,在较为复杂的环境中,激光通过激光发射镜头校准发出,通过激光接收口接受,激光接收口内的光电二极管元件在接受光照后,随光强的不同会产生相应强度的光生电流,电流经过大器放大输出电信号,传输至显示屏上,从而显示直线距离,通过超声波发射头会发射出超声波,然后超声波遇到障碍物会反射回来,被超声波接收头所接收,经过单片机的计算后,得出躲避指令后再传回装置内,使装置进行躲避动作。
附图说明
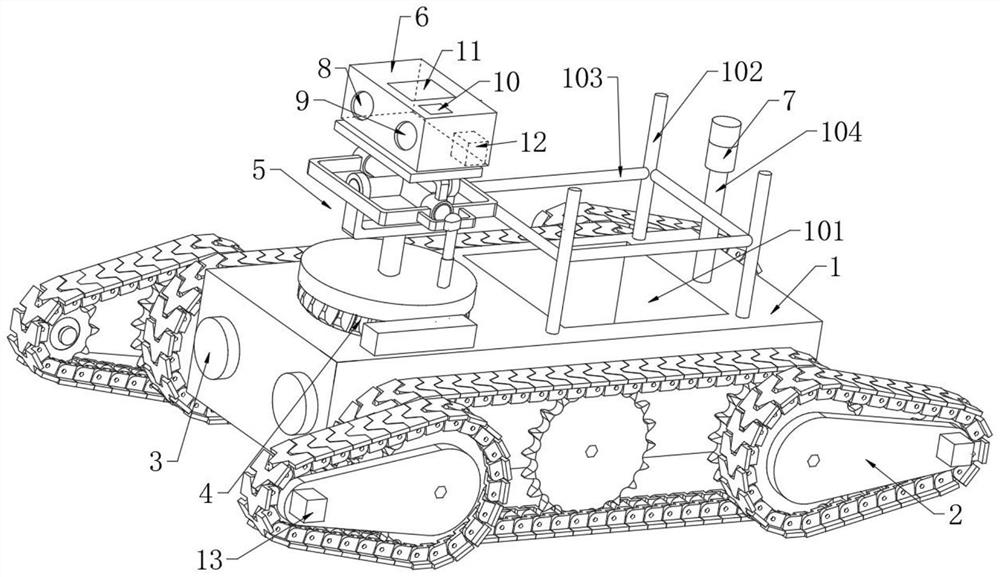
图1为本发明的结构示意图;
图2为本发明的第一驱动装置结构示意图;
图3为本发明的第二驱动装置结构示意图;
图4为本发明的万向球结构示意图;
图5为本发明的超声波测距仪结构示意图。
图中:1、安置仓;101、内置腔;102、支撑柱;103、连接梁;104、导柱;2、电动履带;3、照明灯;4、第一驱动装置;401、涡轮;402、罩壳;403、蜗杆;404、驱动电机;5、第二驱动装置;501、衔接盘;502、安装平台;503、立柱;504、第一U形架;505、第一转轴座;506、矩形框;507、第二转轴座;508、十字轴;509、第二U形架;510、第三U形架;511、第四U形架;512、第一电动推杆;513、第二电动推杆;514、万向球;515、转动座;5151、耳板;5152、转动孔;6、控制盒;7、警示灯;8、激光接收口;9、激光发射镜头;10、激光电源按钮;11、显示屏;12、电源模块;13、超声波测距仪;1301、信号处理板;1302、单片机;1303、超声波发射头;1304、晶振;1305、超声波接收头。
具体实施方式
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例
请参阅附图1-5,一种自动跟随机器人的避障装置,包括机器人本体以及设置在机器人本体上的:安置仓1、照明灯3、第一驱动装置4、第二驱动装置5以及控制盒6。
其中,安置仓1的两侧均固定安装有电动履带2。
进一步的,设置的安置仓1内部为空腔结构,用于放置传输设备和动力驱动设备,且安置仓1内部为密闭的结构,起到防水作用,从而使内部保持干燥状态,保护电路,设置的电动履带2用于带动安置仓1的前后移动,相比传统的万向轮,电动履带2负载能力大,越障能力强,能够适应复杂环境和地形,其实用性较强。
其中,一对照明灯3分别固定安装在安置仓1的前后两侧。
进一步的,设置的一对照明灯3可对昏暗的场所提供照明,方便照亮周围的环境,便于装置的移动,且一对照明灯3的输入端均与控制盒6内的电源模块12电性连接。
其中,第一驱动装置4包括涡轮401,涡轮401转动连接在安置仓1上表面的一侧。
进一步的,通过设置的第一驱动装置4可带动控制盒6进行水平方向的周转,用于增强激光发射镜头9的视野,便于激光发射镜头9的前后水平角度调整,可根据实际情况进行调整,使适用范围更广。
其中,第二驱动装置5包括衔接盘501和安装平台502,衔接盘501与涡轮401通过销轴固定安装在一起。
进一步的,通过设置的第二驱动装置5可带动控制盒6进行不同维度的俯仰转动,进一步了加强装置的适用范围。
其中,控制盒6固定安装在安装平台502上。
进一步的,通过设置的安装平台502可以实现控制盒6的增稳,无论机器人本体如何动作,均可以保持控制盒6稳定地朝向一个方向,从而使避障模块采集到的信息可以更稳定。
具体的,安置仓1上设置有内置腔101,位于内置腔101周边的安置仓1上垂直焊接有支撑柱102,相邻支撑柱102之间焊接有连接梁103。
在进一步的实施例中:在安置仓1上设置有内置腔101呈矩形内凹状的,可用于放置行李等物品,作为优选的,设置的支撑柱102的数量为四根,且分别位于内置腔101开口处的四个拐角处,通过相邻支撑柱102之间焊接有连接梁103,用于加强相邻的支撑柱102之间的联系,起到增稳作用,同时还可以防止物品收到颠簸而掉落。
具体的,位于内置腔101远离第一驱动装置4一侧的安置仓1上垂直焊接有导柱104,导柱104上端设置有警示灯7。
在进一步的实施例中:设置的导柱104内部为空腔结构,方便电线穿过,设置的警示灯7通过电线与控制盒6内的电源模块12电性连接,通过设置的警示灯7用于提醒过往的人群,以防误撞。
具体的,第一驱动装置4还包括罩壳402,罩壳402内转动连接有蜗杆403,蜗杆403的一端贯穿出罩壳402,且贯穿出的一端上通过联轴器转动连接有驱动电机404,蜗杆403与涡轮401啮合连接在一起。
在进一步的实施例中:设置的驱动电机404作为第一驱动装置4的动力输出,通过启动驱动电机404,驱动电机404的输出端带动蜗杆403转动,由于蜗杆403与涡轮401啮合连接在一起,从而使涡轮401带动衔接盘501转动,从而带动控制盒6进行水平方向的周转,增加装置在水平方向的视野。
具体的,衔接盘501上表面中心处垂直焊接有立柱503,立柱503上焊接有第一U形架504,第一U形架504开口处的两端均固定安装有一对第一转轴座505,位于第一U形架504的外侧设置有矩形框506,矩形框506上设置有一对第二转轴座507,一对第一转轴座505与一对第二转轴座507之间转动连接有十字轴508,一对第二转轴座507上表面之间固定连接有第二U形架509,安装平台502的下表面与第二U形架509焊接固定。
在进一步的实施例中:一对第二转轴座507的位置与第一转轴座505的位置呈交错设置,第二转轴座507与相邻的第一转轴座505之间的夹角呈90°,将十字轴508的端部分别固定在一对第一转轴座505与一对第二转轴座507内。将原本单独的第一U形架504与矩形框506连接成为一个整体。
具体的,位于第二转轴座507外侧的矩形框506上焊接有第三U形架510,第三U形架510中部呈半球结构,矩形框506上相邻第三U形架510的位置上焊接有第四U形架511,第四U形架511中部呈半球结构,衔接盘501上通过转动座515转动连接有第一电动推杆512和第二电动推杆513,第一电动推杆512和第二电动推杆513的活动端上均同轴套设有万向球514,一对万向球514分别转动套设在第三U形架510与第四U形架511的半球结构内。
在进一步的实施例中:设置的第一电动推杆512和第二电动推杆513作为第二驱动装置5的动力输出,当第一电动推杆512工作时,第一电动推杆512的活动端通过第三U形架510带动矩形框506以一对第一转轴座505之间的十字轴508为转动点进行转动,当第二电动推杆513工作时,第二电动推杆513的活动端通过第四U形架511带动矩形框506以一对第二转轴座507之间的十字轴508为转动点进行转动,从而带动控制盒6随时保持平稳状态。
具体的,每一转动座515包括一对耳板5151,一对耳板5151上均开有转动孔5152,一对转动孔5152之间转动连接有销轴。
在进一步的实施例中:将第一电动推杆512与第二电动推杆513的底端固定在一对耳板5151之间,销轴依次穿过一侧的转动孔5152、底端以及另一侧转动孔5152,方便第一电动推杆512与第二电动推杆513的转动。
具体的,控制盒6上远离警示灯7的一侧设有激光接收口8和激光发射镜头9,控制盒6上表面设置有激光电源按钮10和显示屏11,控制盒6内设置有电源模块12。
在进一步的实施例中:设置的激光接收口8和激光发射镜头9位于同一水平面上,在较为复杂的环境中,激光通过激光发射镜头9校准发出,通过激光接收口8接受,激光接收口8内的光电二极管元件在接受光照后,随光强的不同会产生相应强度的光生电流,电流经过大器放大输出电信号,传输至显示屏11上,从而显示装置与障碍物之间的直线距离。
具体的,每一侧电动履带2上均设置有一对超声波测距仪13,超声波测距仪13包括信号处理板1301、单片机1302、超声波发射头1303、晶振1304以及超声波接收头1305,信号处理板1301与单片机1302焊接连接,超声波发射头1303与超声波接收头1305位于同一平面上,晶振1304与信号处理板1301通过电连接。
在进一步的实施例中:设置的超声波测距仪13主要是通过声速来测量距离的,通过射出肉眼看不见的线,在装置上有设置瞄点装置,只要把仪器对准要测量的目标,就会出现一点在测距仪的显示器上,超声波发射头1303会发射出超声波,然后超声波遇到障碍物后会反射回来,反射回来的超神波被超声波接收头1305所接收,经过单片机1302的计算后,得出躲避指令后再传回装置内,使装置进行躲避动作。
具体的,激光接收口8、显示屏11的开口槽与控制盒6为一体化结构,且激光发射镜头9嵌于控制盒6中。
在进一步的实施例中:通过激光接收口8、显示屏11的开口槽与控制盒6为一体化设置,使得控制盒6的密封性较好。
工作原理:
在机器人本体行走时,通过启动驱动电机404,驱动电机404的输出端带动蜗杆403转动,由于蜗杆403与涡轮401啮合连接在一起,从而使涡轮401带动衔接盘501转动,从而带动控制盒6进行水平方向的周转,增加装置的水平方向的视野,在路遇颠簸时,第一电动推杆512的活动端通过第三U形架510带动矩形框506以一对第一转轴座505之间的十字轴508为转动点进行转动,当第二电动推杆513工作时,第二电动推杆513的活动端通过第四U形架511带动矩形框506以一对第二转轴座507之间的十字轴508为转动点进行转动,从而带动控制盒6随时保持平稳状态,在较为复杂的环境中,激光通过激光发射镜头9校准发出,通过激光接收口8接受,激光接收口8内的光电二极管元件在接受光照后,随光强的不同会产生相应强度的光生电流,电流经过大器放大输出电信号,传输至显示屏11上,从而显示装置与障碍物之间的直线距离,通过超声波发射头1303发射出的超声波,然后超声波遇到障碍物后反射回来,反射回来的超神波被超声波接收头1305所接收,经过单片机1302的计算后,得出躲避指令后再传回装置内,使装置进行躲避动作。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种自动跟随机器人的避障装置
- 一种基于视觉识别的自动跟随避障方法及机器人