一种抑制电动汽车起步抖动的控制方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及电动汽车技术的领域,特别涉及一种抑制电动汽车起步抖动的控制方法。
背景技术
传统汽车通常采用内燃机作为动力,内燃机加速了人类有限能源的消耗,同时也造成了严重的环境问题。而具有零排放、低热辐射、低噪音的电动汽车受到了人们的重视和欢迎。但在现有技术中,由于电动汽车动力传动的齿轮,花键以及其他传动部件的制造精度,装配工艺以及各零部件一致性问题的影响,使得电动汽车在起步时存在抖动现象,严重降低了车辆的舒适性。
目前通常采用以下三种方式来抑制电动汽车起步时的抖动:1、加补偿扭矩;2、加靠齿扭矩;3、改变扭矩加载斜率;
1、加补偿扭矩:通常是电机控制器MCU通过对电机转速进行不同深度的滤波后求差值得到电机转速抖动量,再将抖动量乘以补偿系数得到补偿扭矩,再将补偿扭矩与整车控制器VCU给定扭矩叠加来抑制电机抖动。但该方式存在滤波参数、补偿系数之间相互影响难以标定的问题,且对于不同电动汽车不完全适用。
2、加靠齿扭矩:通常根据车辆挡位信息给电机施加一个固定小扭矩使得齿轮始终紧密啮合,从而消除了各传动零部件之间的间隙,能够从一定程度上减小车辆的抖动,但电机控制器MCU小扭矩输出时不稳定,该方式的效果将会受到影响。
3、改变扭矩加载斜率:通常用于扭矩换向时改变扭矩加载斜率从而减速传动各零部件之间的冲击造成的抖动,同样如果电机控制器MCU小扭矩输出时不稳定,该方式的效果将会受到影响。
上述三种方式通常将电机控制器MCU固定设置为扭矩模式,而扭矩控制是开环控制,因而并不能保证电机速度的平顺,因此上述三种方式都存在不能很好抑制电动汽车起步时的抖动的问题,如果能够让电机转速平顺就能够有效的抑制车辆的抖动。
发明内容
本发明的目的就是解决背景技术中三种方式的不足,提出一种抑制电动汽车起步抖动的控制方法,解决了电动汽车在起步时存在抖动的技术问题。
为实现上述目的,本发明提出了一种抑制电动汽车起步抖动的控制方法,包括以下步骤:
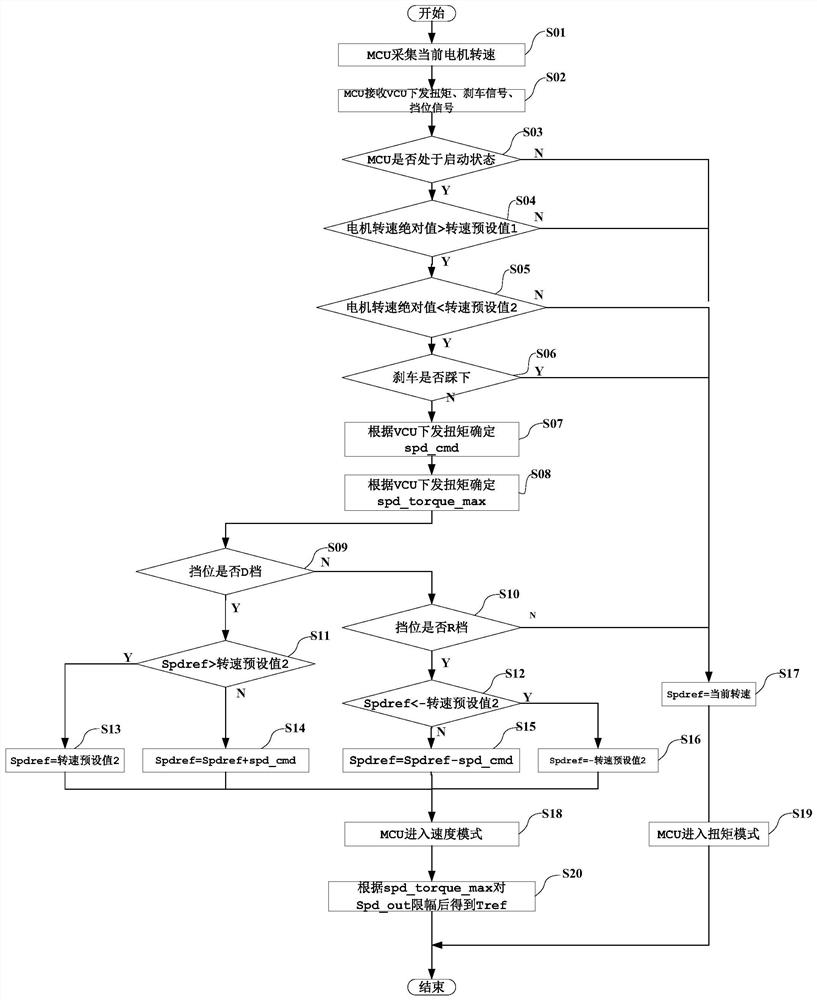
S01:电机控制器MCU采集当前电机转速;
S02:电机控制器MUC接收整车控制器VCU下发的扭矩、刹车信号以及挡位信号;
S03:判断电机控制器MCU是否处于启动状态,如果是,执行S04,如果否,执行S17;
S04:判断当前电机转速绝对值是否大于第一转速预设值,如果是,执行S05,如果否,执行S17,所述第一转速预设值为开启抖动控制的转速值;
S05:判断当前电机转速绝对值是否小于第二转速预设值,如果是,执行S06,如果否,执行S17,所述第二转速预设值为关闭抖动控制的转速值;
S06:判断刹车是否踩下,如果否,执行S07,如果是,执行S17;
S07:根据整车控制器VCU下发扭矩确定周期转速增量spd_cmd,所述周期转速增量spd_cmd与整车控制器VCU下发扭矩正相关;
S08:根据整车控制器VCU下发扭矩确定速度模式下的输出限幅值spd_torque_max,所述输出限幅值spd_torque_max与整车控制器VCU下发扭矩正相关,所述输出限幅值spd_torque_max的最大值为电机最大输出扭矩;
S09:判断当前挡位是否为D档,如果是,执行S11,如果否,执行S10;
S10:判断当前挡位是否为R档,如果是,执行S12,如果否,执行S17;
S11:判断电机目标转速Spdref是否大于第二转速预设值,如果是,执行S13,如果否,执行S14,所述电机目标转速Spdref为进入速度模式的模拟给定转速;
S12:判断电机目标转速Spdref是否小于第二转速预设值的相反数,如果是,执行S16,如果否,执行S15;
S13:将电机目标转速Spdref设为第二转速预设值,之后执行S18;
S14:将下一个周期的电机目标转速Spdref设定为上一个周期的电机目标转速Spdref与周期转速增量spd_cmd之和,之后执行S18;
S15:将下一个周期的电机目标转速Spdref设定为上一个周期的电机目标转速Spdref与周期转速增量spd_cmd之差,之后执行S18;
S16:将电机目标转速Spdref设为第二转速预设值的相反数,之后执行S18;
S17:将电机目标转速Spdref设为当前电机转速,之后执行S19;
S18:进入速度模式,之后执行S20;
S19:进入扭矩模式,从而结束流程;
S20:根据输出限幅值spd_torque_max对速度控制器输出Spd_out进行限幅得到限幅扭矩请求Tref,从而结束流程。
可选的,所述周期转速增量spd_cmd与下发扭矩之间满足线性关系。
可选的,所述周期转速增量spd_cmd与下发扭矩之间满足S型曲线关系。
可选的,所述输出限幅值spd_torque_max与下发扭矩之间满足线性关系。
可选的,所述输出限幅值spd_torque_max与下发扭矩之间满足S型曲线关系。
本发明的有益效果:
本发明实施例提供的一种抑制电动汽车起步抖动的控制方法,通过将当前电机转速绝对值与第一、第二转速预设值进行比较,来确定当前是否应该进入速度模式,再根据当前整车控制器VCU下发的挡位信号来设定电机目标转速Spdref,并通过对速度控制器输出Spd_out进行限幅来得到限幅扭矩请求Tref,针对现有技术中电动汽车在起步时存在抖动这一技术问题,本发明提供的一种抑制电动汽车起步抖动的控制方法能根据电动汽车起步中不同情况,使电机控制器MCU进入相应的速度模式,从而使电机转速稳定,有效抑制了电动汽车起步抖动,此外本发明提供的控制方法可循环执行,具有实时、高效的优点。
本发明的特征及优点将通过实施例结合附图进行详细说明。
附图说明
图1为本发明实施例一种抑制电动汽车起步抖动的控制方法的流程框图;
图2为本发明实施例一种抑制电动汽车起步抖动的控制方法的系统框图。
具体实施方式
为了便于本领域技术人员的理解,下面将结合具体实施例对本发明作进一步详细描述。
请参考图1、图2,本发明实施例提出一种抑制电动汽车起步抖动的控制方法,包括下列步骤:
步骤S01:电机控制器MCU采集当前电机转速;在本实施例中,通过电机控制器MCU来采集当前的电机转速,并将采集到的电机转速实时上传至整车控制器VCU。
步骤S02:电机控制器MCU接收整车控制器VCU下发的扭矩、刹车信号以及挡位信号;具体的,电机控制器MCU接收整车控制器VCU下发的扭矩、刹车信号以及挡位信号,所述整车控制器VCU下发的扭矩、刹车信号以及挡位信号根据驾驶者相应操作来确定。
步骤S03:判断电机控制器MCU是否处于启动状态,如果是,则执行步骤S04,如果否,则执行步骤S17;具体的,通过整车控制器VCU判断电机控制器MCU是否处于启动状态,从而执行后续相应步骤,其中,启动状态又被称为Ready状态,表示电动汽车的电机控制器MCU已经启动成功,可以随时启程的状态。
步骤S04:判断当前电机转速绝对值是否大于第一转速预设值,如果是,则执行步骤S05,如果否,则执行步骤S17,所述第一转速预设值为开启抖动控制的转速值;其中第一转速预设值需要根据实车抖动情况来选取,具体的,当前电机转速绝对值小于第一转速预设值时,电动汽车还未出现起步抖动趋势,此时采用扭矩模式;若当前电机转速绝对值大于第一转速预设值时,电动,电动汽车将出现起步抖动趋势,后续应进入速度模式,在本实施例中,通过电机控制器MCU直接对当前电机转速绝对值与第一转速预设值进行比较和判断。
步骤S05:判断当前电机转速绝对值是否小于第二转速预设值,如果是,则执行步骤S06,如果否,则执行步骤S17,所述第二转速预设值为关闭抖动控制的转速值;其中第二转速预设值也需要根据实车抖动情况来选取,具体的,当前电机转速绝对值小于第二转速预设值时,电动汽车会出现起步抖动,后续应进入速度模式;若当前电机转速绝对值大于第二转速预设值时,电动,电动汽车不会出现起步抖动,后续应进入扭矩模式;此外,本步骤通过电机控制器MCU来进行比较和判断,在此不再赘述。
步骤S06:判断刹车是否踩下,如果否,则执行步骤S07,如果是,则执行步骤S17;具体的,电机控制器MCU根据是否接收到整车控制器VCU下发的刹车信号,来对刹车是否踩下做出判断。
步骤S07:根据整车控制器VCU下发扭矩确定周期转速增量spd_cmd,所述周期转速增量spd_cmd与整车控制器VCU下发扭矩正相关;在本实施例中,所述周期转速增量spd_cmd与整车控制器VCU下发扭矩之间满足线性关系或S型曲线关系,在其他实施例中,所述周期转速增量spd_cmd与整车控制器VCU下发扭矩之间还可以是其他成正相关的曲线关系,本领域技术人员可根据实际需要进行调整,从而达到抑制电机起步抖动的效果的技术方案都属于本发明的保护范围。
步骤S08:根据整车控制器VCU下发扭矩确定速度模式下的输出限幅值spd_torque_max,所述输出限幅值spd_torque_max与下发扭矩正相关;所述输出限幅值spd_torque_max也被称为扭矩限制门限值,其最大值为电机最大输出扭矩,在本实施例中,所述输出限幅值spd_torque_max与下发扭矩之间满足线性关系或S型曲线关系,在其他实施例中,所述输出限幅值spd_torque_max与下发扭矩之间还可以是其他成正相关的曲线关系,本领域技术人员可根据实际需要对输出限幅值spd_torque_max进行调整,从而达到抑制电机起步抖动的效果的技术方案都属于本发明的保护范围。
步骤S09:判断当前挡位是否为D档,如果是,则执行步骤S11,如果否,则执行步骤S10,具体的,电机控制器MCU根据接收到整车控制器VCU下发的挡位信号来确定电动汽车当前位于D档还是R档,再进行后续电机目标转速Spdref的设定。
步骤S10:判断当前挡位是否为R档,如果是,则执行步骤S12,如果否,则执行步骤S17,具体的,电机控制器MCU根据接收到整车控制器VCU下发的挡位信号来确定电动汽车当前位于D档还是R档,从而可以进行后续电机目标转速Spdref的设定。
步骤S11:判断电机目标转速Spdref是否大于第二转速预设值,如果是,则执行步骤S13,如果否,则执行步骤S14,所述电机目标转速Spdref为进入速度模式的模拟给定转速。
步骤S12:判断电机目标转速Spdref是否小于第二转速预设值的相反数,如果是,则执行步骤S16,如果否,则执行步骤S15。
步骤S13:将电机目标转速Spdref设为第二转速预设值,之后执行步骤S18;具体的,当位于D挡且电机目标转速Spdref大于第二转速预设值时,电机目标转速Spdref等于第二转速预设值,其中所述电机目标转速Spdref作为速度控制器的参考输入,所述电机转速作为速度控制器的反馈输入,速度控制器根据参考输入、反馈输入经过PI控制以后得到速度控制器输出Spd_out。
步骤S14:将下一个周期的电机目标转速Spdref设定为上一个周期的电机目标转速Spdref与周期转速增量spd_cmd之和,之后执行步骤S18;具体的,当位于D挡且电机目标转速Spdref小于第二转速预设值时,电机目标转速Spdref等于上一个周期的电机目标转速Spdref与周期转速增量spd_cmd之和。
步骤S15:将下一个周期的电机目标转速Spdref设定为上一个周期的电机目标转速Spdref与周期转速增量spd_cmd之差,之后执行步骤S18;具体的,当位于R挡且电机目标转速Spdref大于第二转速预设值的相反数时,电机目标转速Spdref等于上一个周期的电机目标转速Spdref与周期转速增量spd_cmd之差。
步骤S16:将电机目标转速Spdref设为第二转速预设值的相反数,之后执行步骤S18;具体的,当位于R挡且电机目标转速Spdref小于第二转速预设值的相反数时,电机目标转速Spdref等于第二转速预设值的相反数。
步骤S17:将电机目标转速Spdref设为当前电机转速,之后执行步骤S19;在本实施例中,电机控制器MCU保存当前电机转速为下次进入速度模式做准备。步骤S18:进入速度模式,之后执行步骤S20;具体的,抖动控制开关模块控制电机控制器MCU进入上述设定好电机目标转速Spdref模式的速度模式,使电机控制器MCU工作在速度闭环,从而电机转速速度稳定,不会发生抖动。
步骤S19:进入扭矩模式,从而结束流程;但上述流程仅为一种抑制电动汽车起步抖动的控制过程中的单个流程,在电动汽车起步过程中可被循环重复执行,此外当电机控制器MCU工作在扭矩模式时,整车控制器VCU下发扭矩直接作为扭矩控制器参考输入,再经过扭矩控制器模块,FOC模块和逆变器模块后实现对电机扭矩控制。
步骤S20:根据输出限幅值spd_torque_max对速度控制器输出Spd_out进行限幅处理得到限幅扭矩请求Tref,所述限幅扭矩请求Tref作为扭矩控制器参考输入,从而结束流程,但上述流程仅为一种抑制电动汽车起步抖动的控制过程中的单个流程,在电动汽车起步过程中可被循环重复执行。
综上所述,本发明实施例一种抑制电动汽车起步抖动的控制方法先将当前电机转速绝对值与第一、第二转速预设值进行比较,来确定当前是否应该进入速度模式,再根据当前整车控制器VCU下发的挡位信号来设定电机目标转速Spdref,并通过对速度控制器输出Spd_out进行限幅来得到限幅扭矩请求Tref,针对现有技术中电动汽车在起步时存在抖动这一技术问题,本发明提供的一种抑制电动汽车起步抖动的控制方法能根据电动汽车起步中不同情况,使电机控制器MCU进入相应的速度模式,从而使电机转速稳定,有效抑制了电动汽车起步抖动,此外本发明提供的控制方法可循环执行,具有实时、高效的优点。
上述实施例是对本发明的说明,不是对本发明的限定,任何对本发明简单变换后的方案均属于本发明的保护范围。以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种抑制电动汽车起步抖动的控制方法
- 一种纯电动汽车起步抖动的抑制方法